Результат интеллектуальной деятельности: ИСПЫТАТЕЛЬНАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ИЗМЕНЯЮЩИХСЯ СИСТЕМНЫХ ПАРАМЕТРОВ В РЕАЛЬНОМ ВРЕМЕНИ
Вид РИД
Изобретение
Область изобретения
[0001] Настоящее изобретение относится к испытательной системе и способу управления испытательной системой для испытания образца и, более конкретно, к контроллеру испытательной системы, который в реальном времени компенсирует изменяющиеся системные параметры, которые возникают из-за нелинейного отклика испытательной системы и образца.
Предпосылки к созданию изобретения
[0002] Сервоуправляемые процессы типично выполнятся по хорошо известной схеме ПИД-регулирования, в которой осуществляется пропорциональное ( ), интегральное (
), интегральное ( ) и дифференциальное (
) и дифференциальное ( ) усиление замкнутого серво-контура, который подает серво-выход
) усиление замкнутого серво-контура, который подает серво-выход  на сервопривод для устранения ошибки, появляющейся как разница между требуемым (Command) и фактическим (Actual) показателем параметра подлежащего регулированию процесса. Линейные системы типично демонстрируют постоянную скорость изменения в обратной связи Feedback (
на сервопривод для устранения ошибки, появляющейся как разница между требуемым (Command) и фактическим (Actual) показателем параметра подлежащего регулированию процесса. Линейные системы типично демонстрируют постоянную скорость изменения в обратной связи Feedback ( ,
, ) как функцию данного выходного серво-сигнала. В этом случае систему можно оптимально настроить на оптимальный режим, набором коэффициентов усиления ПИД-регулирования. Однако это решение не является адекватным, если система демонстрирует нелинейный или нестабильный отклик, т.е., если не может быть уникальным для данной величины . Это может возникать в сервоуправляемых механических испытательных системах, предназначенных для приложения нагрузки к пробному образцу, подвергающемуся статической или циклической нагрузке. В таких системах вводят так называемую коррекцию жесткости для учета нелинейного отклика. Она основана на измерении смещения
) как функцию данного выходного серво-сигнала. В этом случае систему можно оптимально настроить на оптимальный режим, набором коэффициентов усиления ПИД-регулирования. Однако это решение не является адекватным, если система демонстрирует нелинейный или нестабильный отклик, т.е., если не может быть уникальным для данной величины . Это может возникать в сервоуправляемых механических испытательных системах, предназначенных для приложения нагрузки к пробному образцу, подвергающемуся статической или циклической нагрузке. В таких системах вводят так называемую коррекцию жесткости для учета нелинейного отклика. Она основана на измерении смещения  (положение воздействующего элемента) и нагрузки
(положение воздействующего элемента) и нагрузки  , воздействующей на образец, и для непрерывной коррекции управляющего выходного сигнала ПИД-регулирования, уменьшая или увеличивая его в пропорции
, воздействующей на образец, и для непрерывной коррекции управляющего выходного сигнала ПИД-регулирования, уменьшая или увеличивая его в пропорции  как функцию времени.
как функцию времени.
[0003] Сервоуправляемые испытательные системы, используемые для механического испытания образцов, которые варьируются в пределах от простых пробных образцов до сложных структур или субструктур, требуют применения одного или множества действующих независимо воздействующих элементов, а также применения и статических, и динамических нагрузок. Такие условия могут вводить серьезные искажения в мгновенный отзыв системы из-за сил инерции, диссипативных сил и сил упругости. Такой отзыв может ограничивать скорость нагружения, даже после коррекции коэффициентов усиления ПИД-регулирования для учета изменения в жесткости образца: проблема часто встречается в многоканальном структурном испытании при регулировании нагрузки. Точное применение требуемых нагрузок на образец в широком диапазоне уровней нагрузки и частот становится затруднительным по нескольким причинам, в том числе следующим:
(R1) геометрические размеры и свойства материала образца изменяются, что приводит к возникновению геометрической и физической нелинейности;
(R2) рассеяние энергии на управляющих элементах, что приводит к недостаточной нагрузке;
(R3) взаимодействие воздействующего элемента и структуры, которое добавляет энергии в систему, что приводит к чрезмерной нагрузке или к нестабильности регулирования.
В этом сценарии важно учитывать динамику испытательной системы и образца так, чтобы управляющие элементы могли точно прилагать требуемые нагрузки.
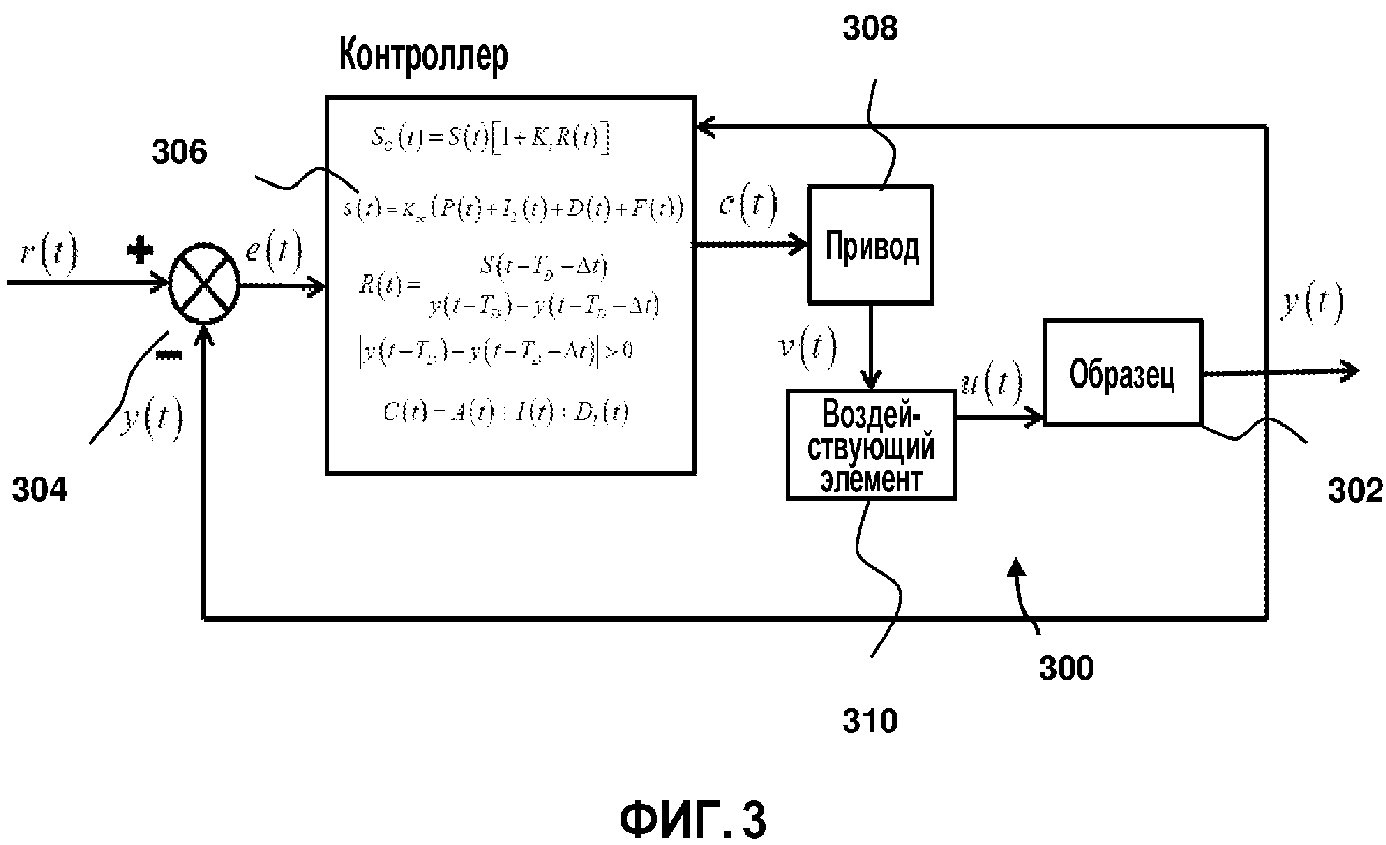
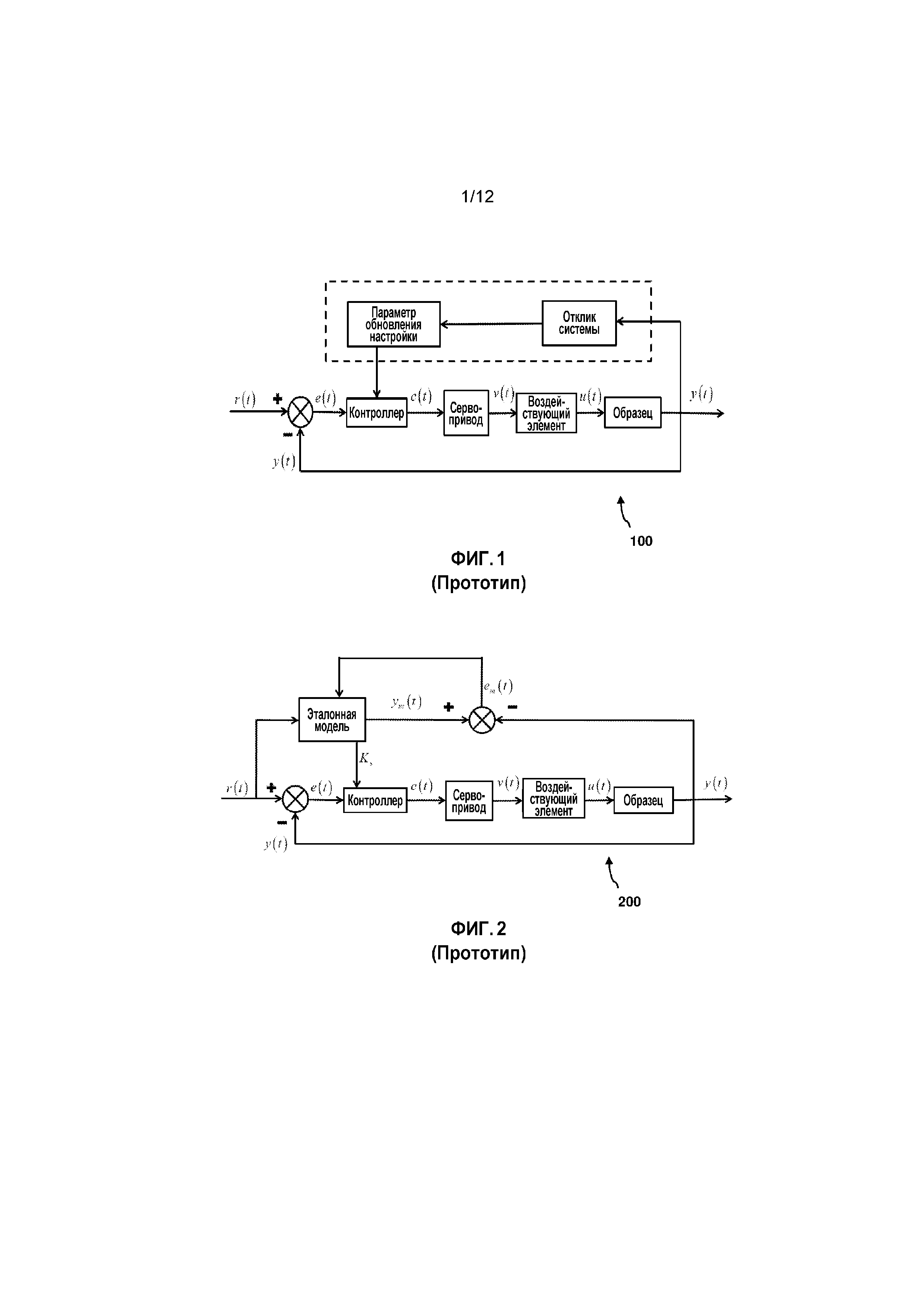
[0004] В большинстве коммерчески доступных и выпускаемых серийно динамических испытательных системах для материалов или структур применяются системы управления, основанные на алгоритме пропорционально-интегрально-дифференциального (ПИД) регулирования. Успех таких систем управления ограничен небольшим диапазоном уровней нагрузки и частот, согласующимся с линейным поведением образца, поскольку такие системы не принимают в расчет причины R1, R2 и R3, указанные выше. Один класс новых систем, показанный на фиг. 1, учитывает причину R1, используя модифицированный способ ПИД-регулирования с дополнительным параметром коррекции жесткости, принимающий в расчет изменяющиеся свойства материала или структуры. На фиг. 1 показаны следующие переменные: r(t): команда; y(t): обратная связь; e(t)=r(t)-y(t): ошибка; c(t): выходной сигнал контроллера; v(t): выходной сигнал сервопривода; u(t): сила, действующая на воздействующий элемент; y(t): сила, действующая на образец.
[0005] В этой системе 100 дополнительный параметр, динамическую жесткость, измеряют посредством гибкости: отношение изменения в смещении к изменению в обратной связи. Для этого нужно, чтобы система 100 при регулировании нагрузки также измеряла смещение. Выходной сигнал ПИД-контроллера, умноженный на этот коэффициент (гибкость), во время испытания принимает во внимание меняющуюся жесткость образца. Во время испытания, если образец становится очень жестким, изменение в обратной связи по нагрузке, соответствующее небольшому изменению в смещении, будет очень высоким и, следовательно, коэффициенты усиления, задающие выходной сервосигнал, требуется уменьшить. Поскольку измеряемая гибкость, т.е., величина, обратная жесткости, для жесткого образца мала, умножение выходного сервосигнала на нее приведет к соответствующей регулировки отклика воздействующего элемента для соответствия мгновенной жесткости образца. Аналогично, когда образец имеет высокую гибкость, т.е., изменение смещения, соответствующее небольшому изменению нагрузки, будет большим, коэффициенты усиления в контуре регулирования, который управляет выходным сервосигналом, следует увеличить. Поэтому, измеренная гибкость и умножение на нее выходного сервосигнала, принимают в расчет усилившуюся потребность в движении воздействующего элемента. Так достигается адаптивное регулирование в испытательной системе 100 во время динамического испытания образца с изменяющейся жесткостью, что показано на фиг. 1. Поскольку эффективная измеренная гибкость зависит от измеренных обратной связей и смещения, и силы, будет возникать запаздывание по меньшей мере 10-100 миллисекунд, в зависимости от типа сервопривода. Это ограничивает максимальную частоту, достижимую в адаптивном регулировании, и эффективность такого адаптивного регулирования снижается за счет неизбежного шума в сигнале смещения рабочего хода, который становится чрезвычайно усиленным в процессе расчета производной. В случае многоканального структурного испытания (например, при испытании конструкции летательного аппарата, которое требует нескольких воздействующих элементов, действующих при регулировании нагрузки) стоимость дополнительных каналов измерения отклика (смещения) для повышения рабочей частоты с параметром коррекции жесткости, может быть неприемлемо высокой из-за необходимости дополнительных датчиков, формирователях сигнала и высокопроизводительных систем сбора данных.
[0006] На фиг. 2 показана испытательная система 200 другого типа, которая включает способ регулирования, основанный на эталонной модели, который учитывает даже причины R2 и R3, путем включения приближенной модели всей испытательной системы и образца. На фиг. 2 показаны разные параметры: r(t): команда; y(t): обратная связь; e(t)=r(t)-y(t): ошибка; c(t): выходной сигнал контроллера; v(t): выходной сигнал сервопривода; u(t): сила, генерируемая воздействующим элементом; y(t): сила, воздействующая на образец; ym(t): отклик модели; em=r(t)-ym(t): ошибка. В этой системе 200 и к эталонной модели, и к реальной системе прилагают данные возбуждения и, затем, на основе сравнения расчетных откликов цифровой модели и измеренных откликов реальной системы, обновляют системные параметры цифровой модели. Такая эталонная модель применяется в настоящее время для прогнозирования откликов системы и модификации параметров контроллера, как показано на фиг. 2. Однако внедрение такого алгоритма регулирования, основанного на эталонной модели, требует технически сложных вычислительных процессоров и успех такого подхода также зависит от скорости сходимости обновленных параметров модели и их точного моделирования. Кроме того, такие алгоритмы регулирования со сложной цифровой моделью системы не пригодны для высокопроизводительного регулирования в реальном времени системой, для которой важно учитывать причины R1, R2 и R3, принимая во внимание время ожидания сервореагирования 10-100 миллисекунд. Соответственно, известные алгоритмы, показанные на фиг. 1 и 2 по существу являются "ретроспективными" системами регулирования.
[0007] Соответственно, существует потребность в решении одной или более их описанных выше задач. Настоящее изобретение имеет потенциал для уникального и экономичного решения этих задач.
Краткое описание изобретения
[0008] Целью настоящего изобретения является создание системы, которая по существу устраняет указанные выше недостатки.
[0009] Главной целью настоящего изобретения является создание системы и способа для испытания образца посредством учета коррекции жесткости образца в реальном времени.
[0010] Настоящее изобретение основано на непрерывном расчете прогнозного отклика системы. Это отличается от известных способов, которые основаны на "ретроспективном" отклике системы. Поэтому настоящее изобретение требует непрерывной оценки вероятности того или иного отклика системы на текущий выходной сервосигнал с соответствующим обновлением коэффициентов усиления ПИД-регулирования. Как было показано, это обеспечивает не только высокую точность в ответ на сигнал команды, но и существенное уменьшение, запаздывания по фазе между командой и обратной связью, которое стремится к нулю. Настоящее изобретение использует только базовые измеренные величины системы ПИД-регулирования без обращения к дополнительным измеренным переменным и/или к цифровой модели системы, в отличие от известных способов.
[0011] В настоящем изобретении предлагается способ прогнозирования отклика системы (жесткости), который учитывает изменение параметров системы и образца в широком диапазоне уровней нагрузки и частот, и оценивает модифицированный вод на управляющие элементы, так, чтобы поддерживать высокую точность приложения требуемых входных нагрузок в системе. Настоящее изобретение исключает необходимость в оценке мгновенной жесткости системы по обратной связи либо по напряжению, либо по рабочему ходу воздействующего элемента. Фактически, в этом способе не нужна никакая обратная связь кроме той обратной связи, которая подлежит серворегулированию. В настоящем изобретении применяется оценка прогнозного, а не "ретроспективного" отклика системы и, поэтому, практически устраняется латентность отклика сервосистемы. Далее, в настоящем изобретении не требуется никаких измерений обратной связи кроме обратной связи по управляющему току. Более конкретно, обратная связь по рабочему ходу и/или по напряжению/деформации считается малозначительной для качества регулирования нагрузки. Настоящее изобретение легко расширяется от одноканальных для многоканальных систем регулирования без изменений, поскольку для выполнения алгоритма для этого канала не требуются никакие параметры, кроме обратной связи по току и команд на индивидуальные каналы.
[0012] Настоящее изобретение основано на непрерывной коррекции коэффициентов усиления ПИД-регулирования, но без обращения к оценке  . Единственным измерением, необходимым для этого варианта, является показания обратной связи по току, будь это сила, напряжение или положение. Необходимая коррекция коэффициента усиления ПИД-регулирования выполняется на основе "прогноза" с возможностью "упреждения", что повышает качество серворегулирования по сравнению с известными средствами.
. Единственным измерением, необходимым для этого варианта, является показания обратной связи по току, будь это сила, напряжение или положение. Необходимая коррекция коэффициента усиления ПИД-регулирования выполняется на основе "прогноза" с возможностью "упреждения", что повышает качество серворегулирования по сравнению с известными средствами.
Краткое описание приложенных чертежей
[0013] Преимущества и признаки изобретения будут более понятны из нижеследующего описания со ссылками на приложенные чертежи, приведенные только как неограничивающие примеры и на которых:
[0014] Фиг. 1 - блок-схема схемы регулирования в типовой испытательной системе, учитывающей переменную жесткость образца.
[0015] Фиг. 2 - блок-схема схемы регулирования в другой типовой испытательной системе, учитывающей переменные параметры системы.
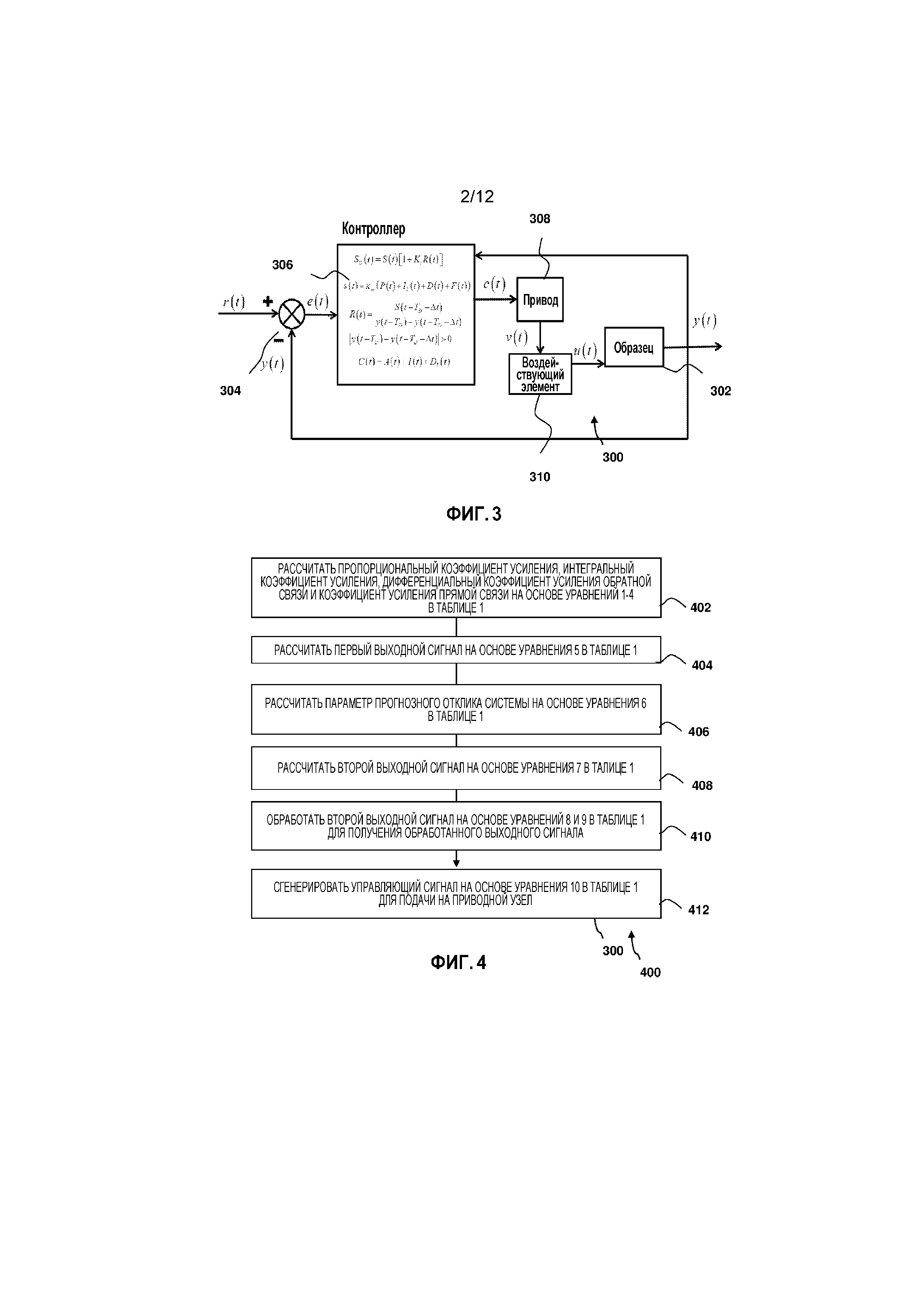
[0016] Фиг. 3 - блок-схема схемы регулирования в испытательной системе по вариант настоящего изобретения.
[0017] Фиг. 4 - диаграмма последовательности генерирования управляющего сигнала по фиг. 3 по варианту настоящего изобретения.
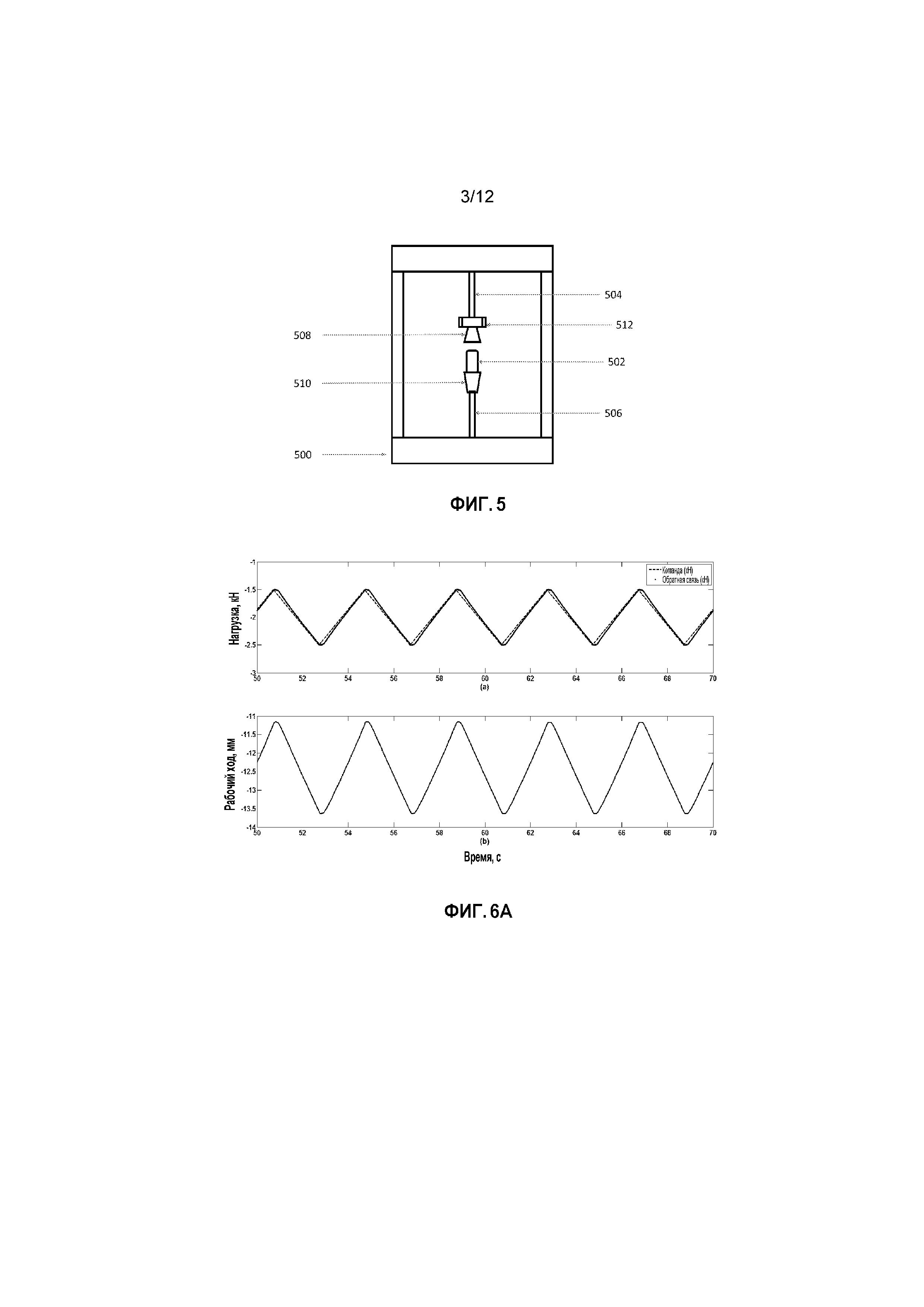
[0018] Фиг. 5 - сервогидравлическая испытательная система по варианту настоящего изобретения.
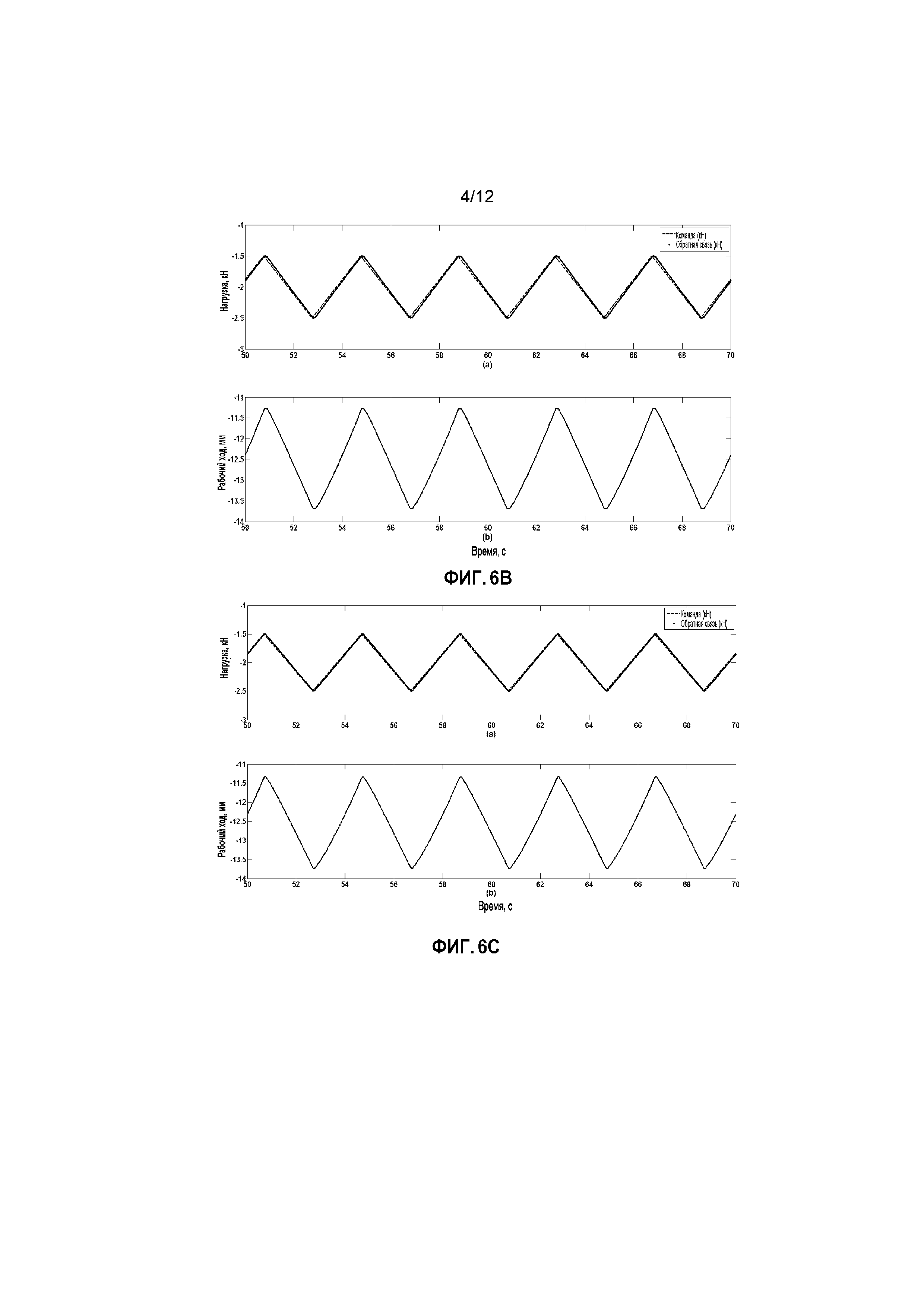
[0019] Фиг. 6А-6С - временные диаграммы смещений верхнего воздействующего элемента и нагрузки во времени для регулирования циклической нагрузки, прилагаемой с низким темпом, при отсутствии внешних возмущений с помощью схем регулирования, показанных в Таблице 3.
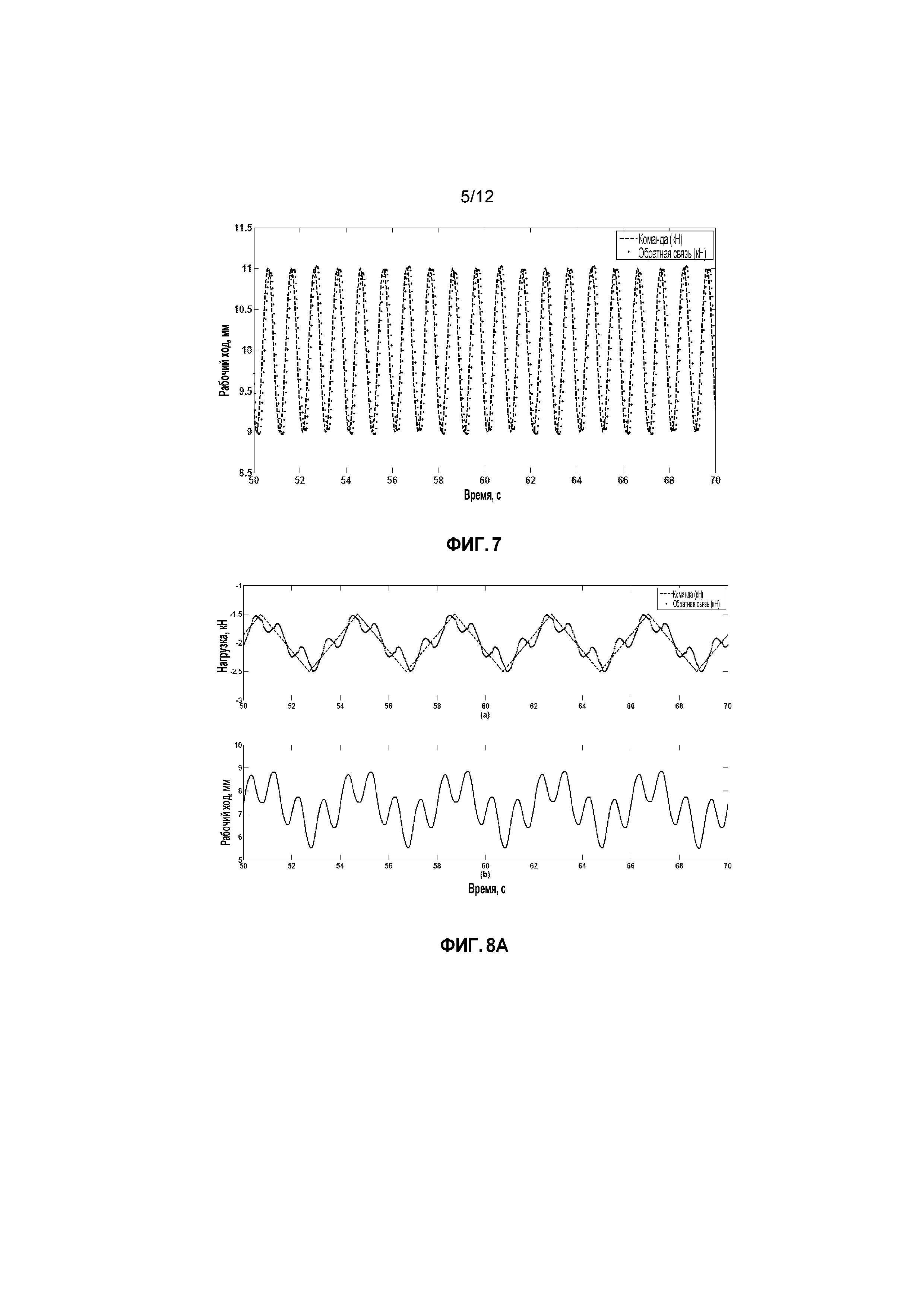
[0020] Фиг. 7 - временная диаграмма смещений нижнего воздействующего элемента как внешнего источника возмущающей нагрузки SED1 (Таблица 4).
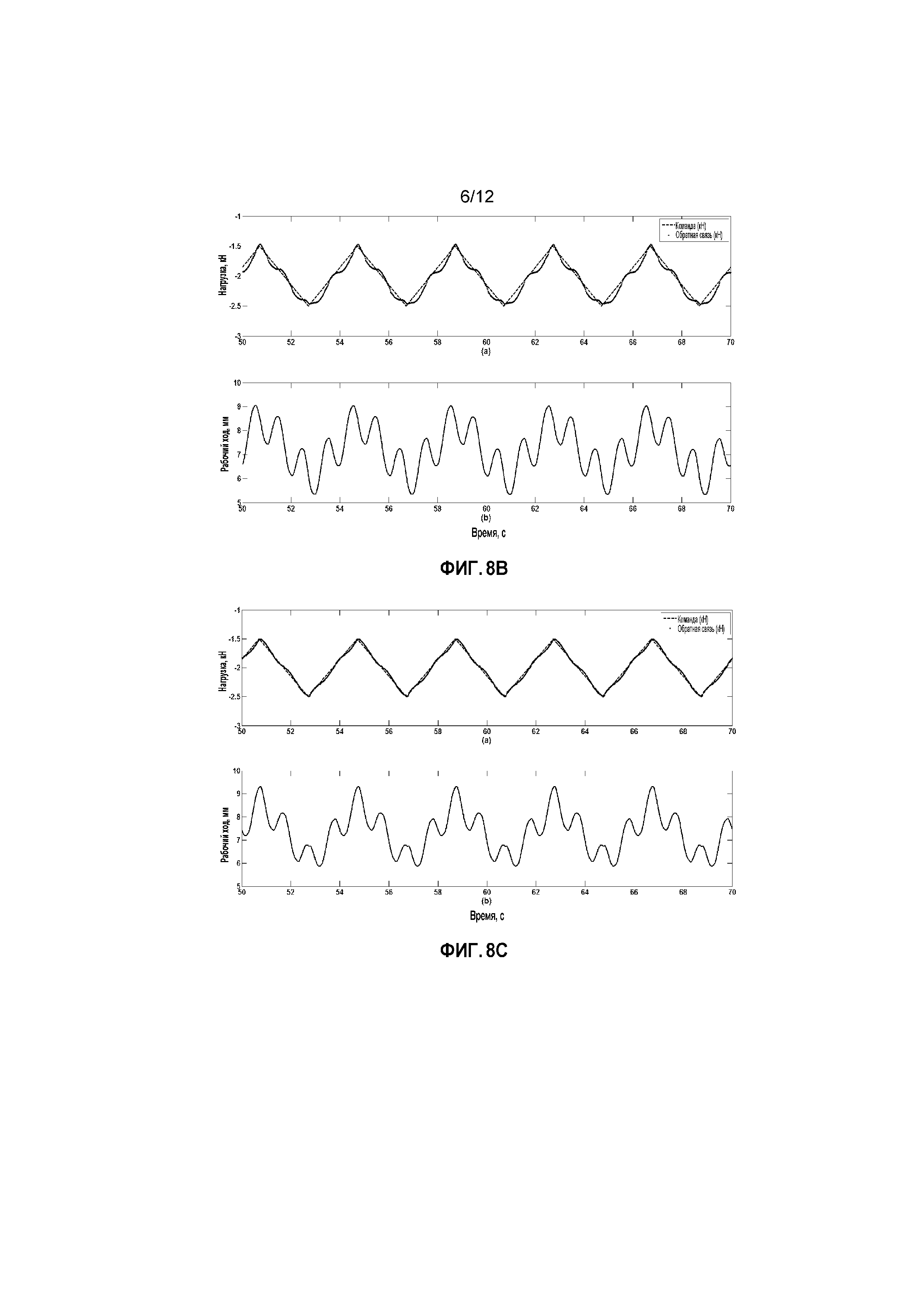
[0021] Фиг. 8А-8С - временные диаграммы смещений верхнего воздействующего элемента для регулирования циклической нагрузки, прилагаемой с низким темпом в присутствии первого внешнего возмущения SED1), как показано на фиг. 6, с использованием схем регулирования, перечисленных в Таблице 3.
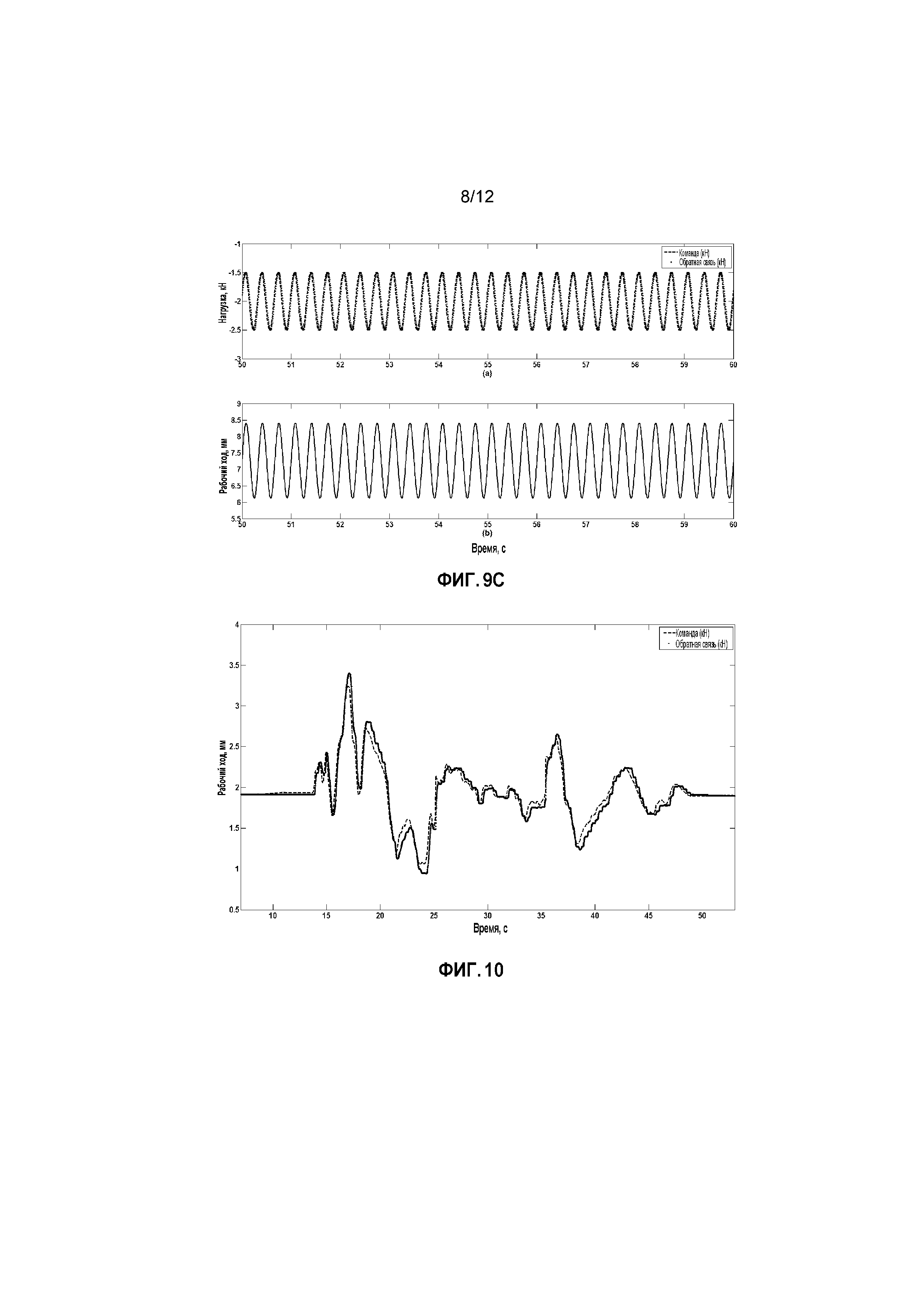
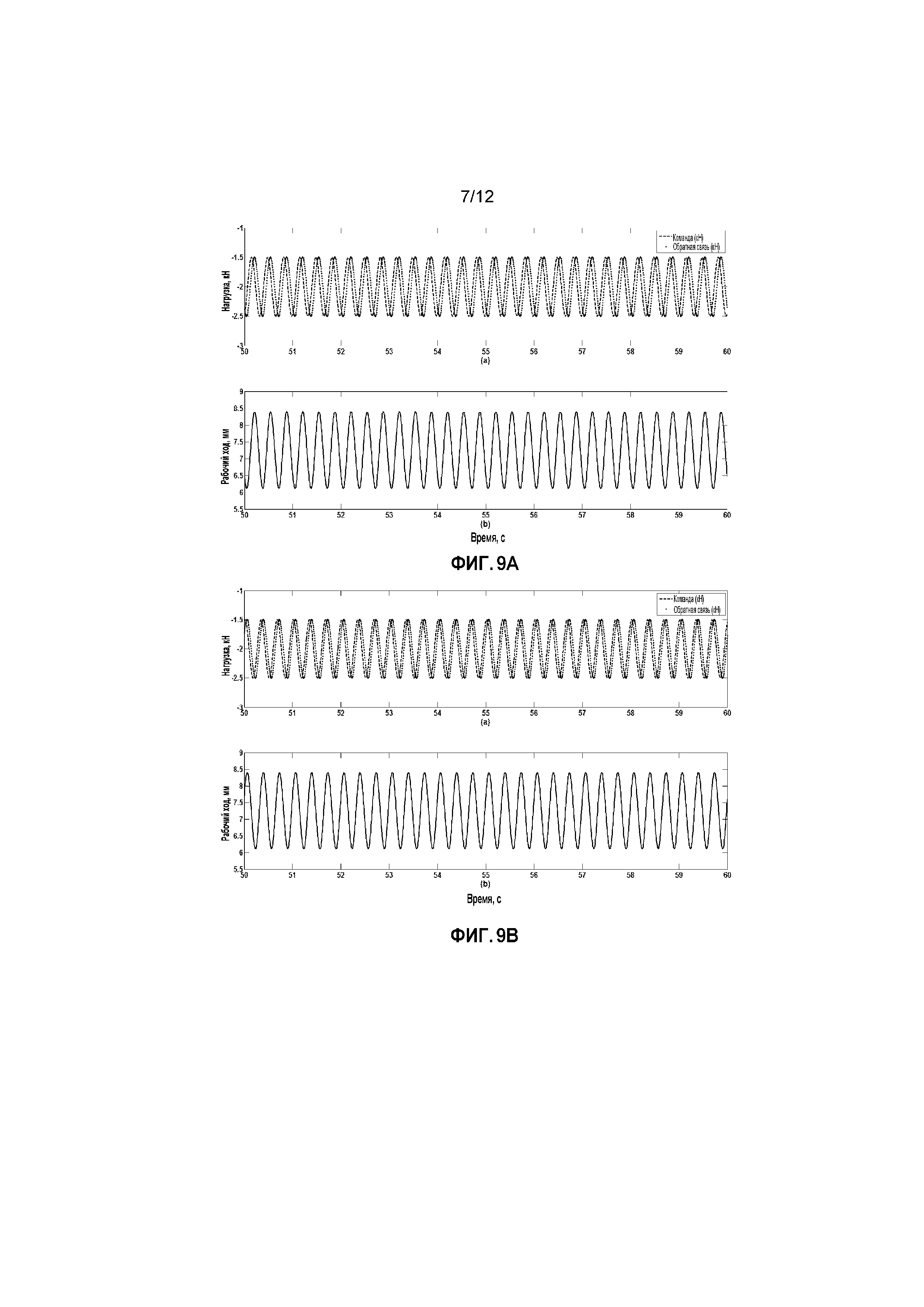
[0022] Фиг. 9А-9С - временные диаграммы смещения верхнего воздействующего элемента и нагрузки для первого случая динамической нагрузки DY1 при отсутствии внешних возмущений с использованием схем регулирования, перечисленных в Таблице 3.
[0023] Фиг. 10 - временная диаграмма смещения нижнего воздействующего элемента как внешнего возмущения в случае нагрузки, DED1, (Таблица 6).
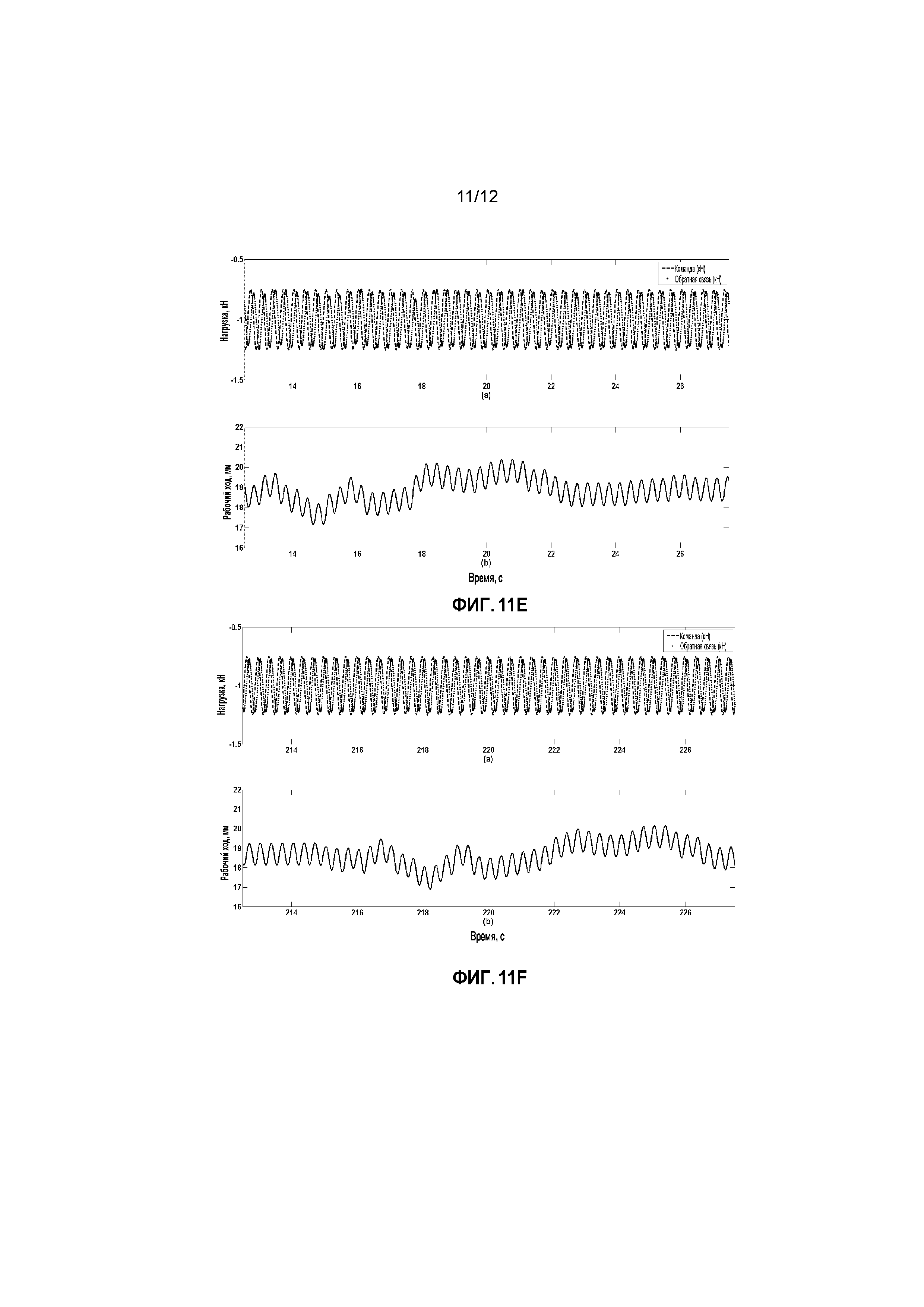
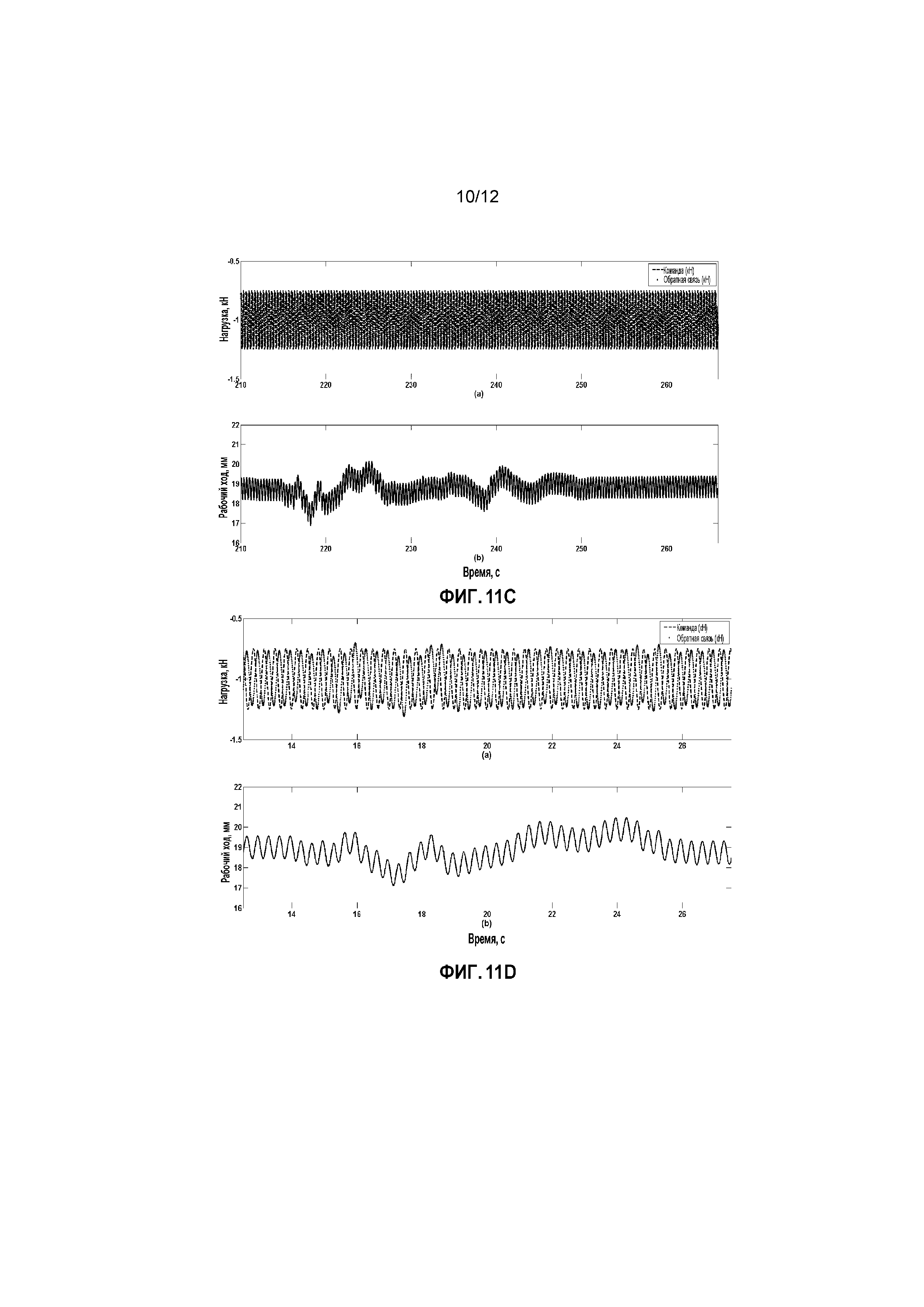
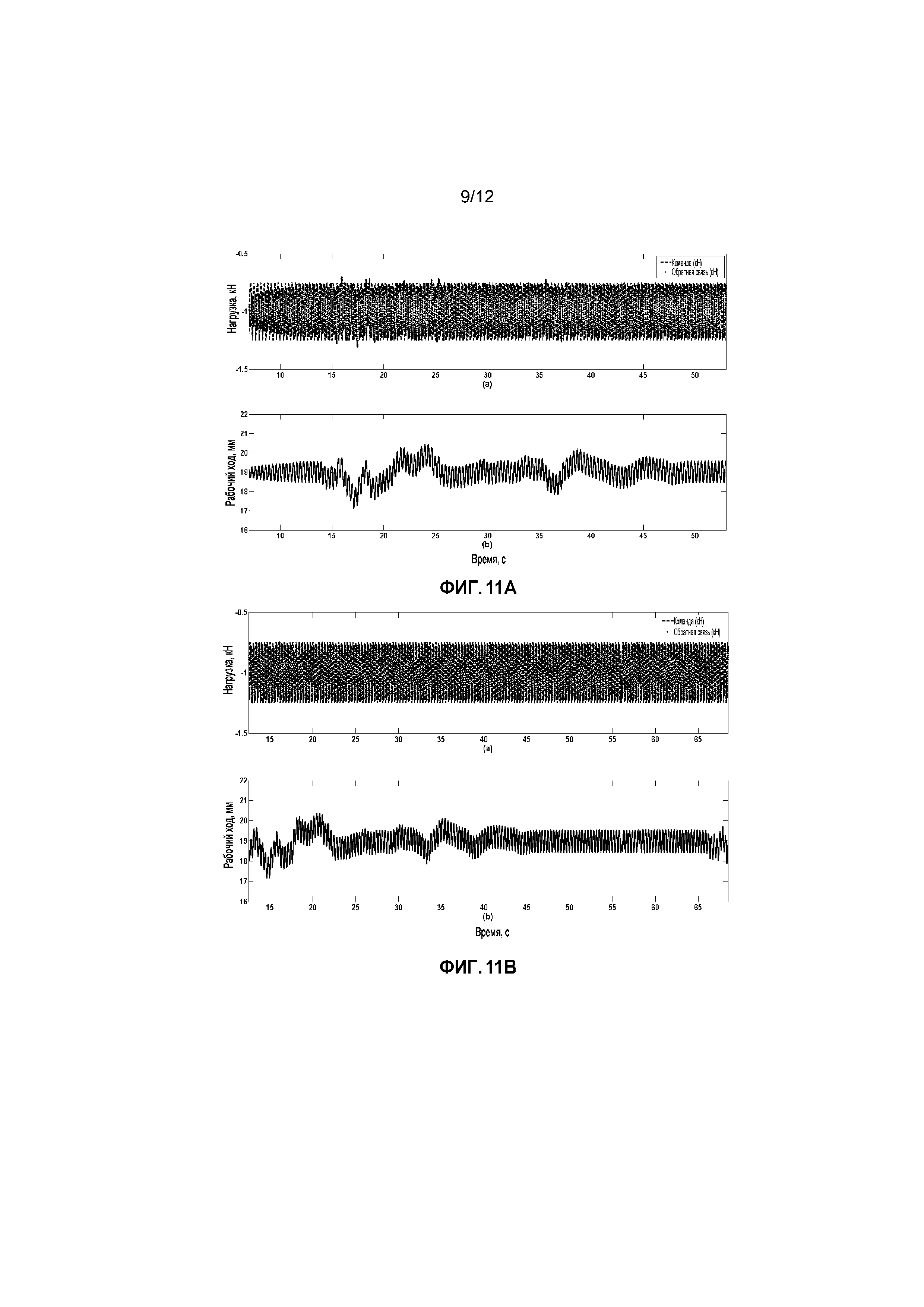
[0024] Фиг. 11А-11С - временные диаграммы смещения верхнего воздействующего элемента и нагрузки для случая нагрузки DED1 с использованием схем регулирования, перечисленных в Таблице 3.
[0025] Фиг. 11D-11F -, соответственно, фрагменты фиг. 11А-11С в увеличенном масштабе.
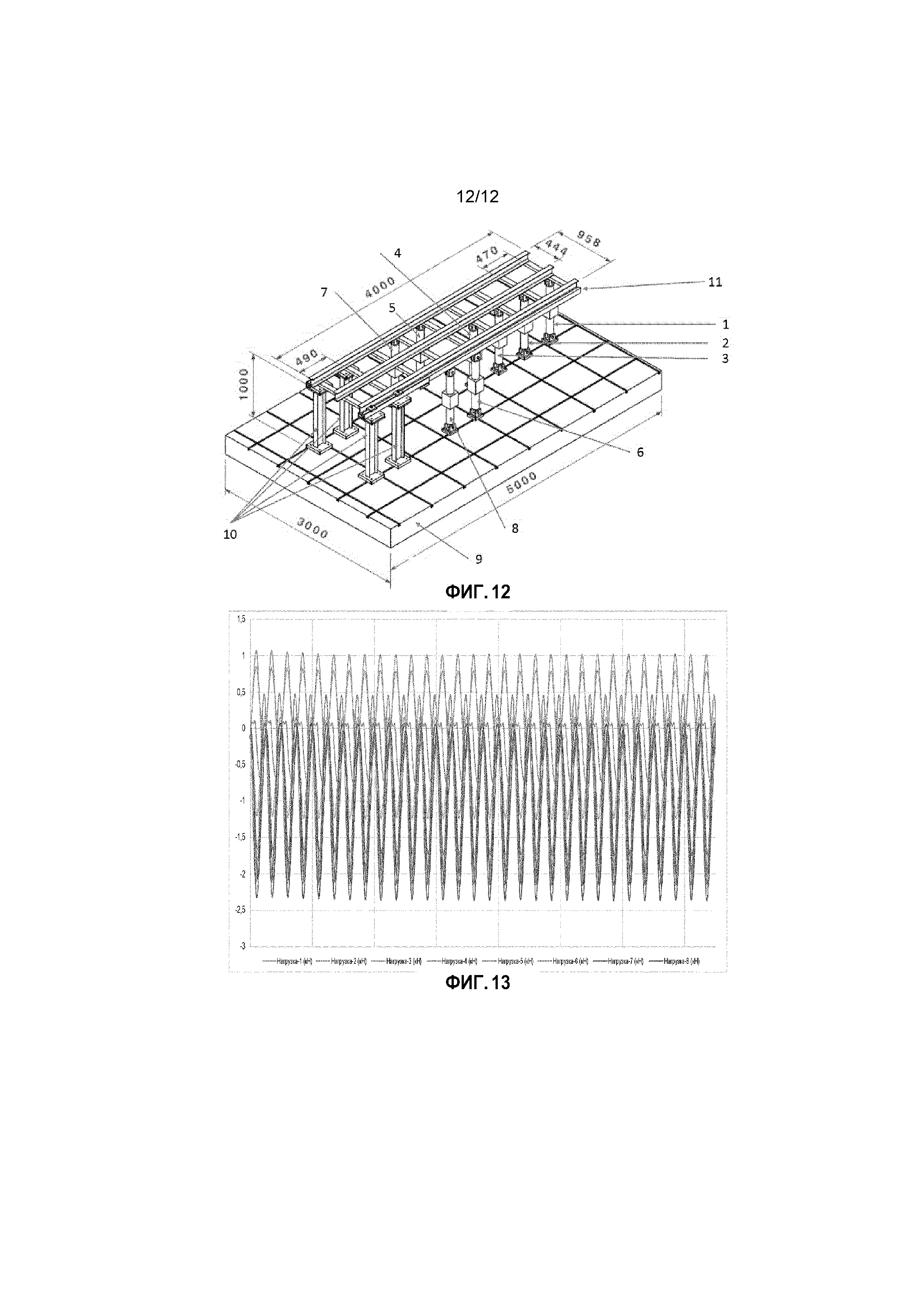
[0026] Фиг. 12 - испытательный стенд, в котором реализована предлагаемая схема регулирования для демонстрации имитации нагрузок на решетчатую структуру, подобную крылу летательного аппарата, в котором распределенную нагрузку на консольную структуру крыла одновременно прилагают и контролируют с использованием множества воздействующих элементов.
[0027] Фиг. 13 - измерение распределенных нагрузок, одновременно прилагаемых всеми воздействующими элементами к структуре крыла, показанной на фиг. 12.
Подробное описание изобретения
[0028] Далее следует описание настоящего изобретения со ссылками на приложенные чертежи. Описывается система и способ испытания образца посредством учета параметров системы.
[0029] Далее описываются только иллюстративные варианты изобретения и это описание не ограничивает объем, применимость и конфигурацию изобретения. Это описание имеет целью дать удобную иллюстрацию для реализации разных вариантов изобретения. Ка станет понятно позже, в функции и расположение структурных/оперативных признаков этих вариантов можно вносить различные изменения, не выходя за пределы объема изобретения, определенного в описании. Следует понимать, что настоящее описание можно адаптировать для альтернативно сконфигурированных устройств, имеющих другие формы, компоненты и т.п., но, тем не менее, входящих в объем настоящего изобретения. Поэтому, приведенное подробное описание предназначено только для иллюстрации, но не для ограничения.
[0030] На фиг. 3 приведена блок-схема испытательной системы 300 для испытания образца 302 по варианте настоящего изобретения. Испытательная система 300 содержит суммирующее соединение 304, контроллер 306, приводной узел 308 и воздействующий элемент 310. Суммирующее соединение получает входную команду r(t) и обратную связь y(t) от образца 302 и вычисляет ошибку [e(t)=r(t)-y(t)]. Ошибка e(t) передается в контроллер 306 и контроллер 306 генерирует управляющий сигнал c(t), который подается на приводной узел 208 (в целях иллюстрации и описания этот приводной узел считается сервоприводом, который может быть электрическим сервоприводом или гидравлическим сервоклапаном или любым приводом воздействующего элемента. Однако, предлагаемый способ можно реализовать в любой испытательной системе, в которой применяется приводной узел для испытания образца). Приводной узел 308 создает приводной выход v(t), поступающий на воздействующий элемент 310, который прилагает силу u(t) к образцу 302. Образец 302 испытывает силу y(t), которая измеряется и подается обратно на контроллер 306 и суммирующее соединение 304 как обратная связь. Контроллер 306 генерирует управляющий сигнал c(t) на основе способа регулирования, который включает (i) пропорциональную, (ii) интегральную (iii) дифференциальную обратную связь, (iv) прямую связь и (v) подмешивание вибрации. В Таблице 1 приведены аналоговые и цифровые формы каждой из этих компонент и компонент, выведенных из этих базовых компонент. На фиг. 4 представлена диаграмма последовательности для генерирования приводного сигнала по фиг. 3 по варианту настоящего изобретения.
Таблица 1
|













Sc(t): выходной сервосигнал PIDF, скорректированный по жесткости, т.е.,  , содержащий пропорциональную, интегральную, дифференциальную и прямую компоненты, соответственно; R(t): кажущаяся гибкость; TD: постоянная времени дифференцирования; A(t): ослабленная компонента выходного сервосигнала; I(t): компонента статического нуля; DI(t): компонента подмешанной вибрации.
, содержащий пропорциональную, интегральную, дифференциальную и прямую компоненты, соответственно; R(t): кажущаяся гибкость; TD: постоянная времени дифференцирования; A(t): ослабленная компонента выходного сервосигнала; I(t): компонента статического нуля; DI(t): компонента подмешанной вибрации.
Таблица 2
|












Примечание: величины постоянных коэффициентов усиления получены из базовой ручной настройки эталонного линейного образца.
[0031] В Таблице 1 компонента прямой связи показана для полноты схемы регулирования (по настоящему изобретению), в ином случае он удерживается на значении 0, задав KF=0. В Таблице 2 приведены определения переменных, используемых в Таблице 1 и на фиг. 3. Известная реализация схемы ПИД-регулирования типично включает четыре компоненты, выраженные уравнениями 1-4. Компонента прямой связи в известных схемах типично применяется для уменьшения запаздывания по фазе между командой и обратной связью. Эта компонента в настоящем изобретении считается избыточной из-за тенденции к прямой связи, присущей любой прогнозной схеме. Однако, для полноты описания настоящего изобретения он сохранен, хотя и установлен на 0. Параметр R(t), полученный в уравнении 6, рассчитан по дифференциальной обратной связи и выходному сервосигналу S(t). Параметр R(t) модифицирует выходной сигнал S(t) контроллера 306, как показано уравнении 7 в Таблице 1, добавляя компоненту прогнозного отклика системы и ослабляется коэффициентом усиления при прогнозном отклике системы. Прогнозный (упреждающий) характер уравнения 6 в Таблице 1 распространяется на временной кадр, представленный как сумма времени ожидания отклика сервопривода, отклика воздействующего элемента и механического отклика системы, не считая времени ожидания, связанного с измерением обратной связи и расчетом выходного сервосигнала. Это вызвано тем, что последствия компоненты выходного сервосигнала, рассчитанной по уравнению 5 в Таблице 1 эффективно будут видны только после истечения указанной суммы времен ожидания. Следовательно, отклик системы, рассчитанный как функция двух переменных этой компоненты и последней измеренной дифференциальной обратной связи является прогнозным по своей природе, поскольку он не только учитывает мгновенную жесткость системы но и потенциальные изменения в отклике самого сервопривода, связанные с нелинейностью, гистерезисом, сжимаемостью масла в сервогидравлике, и т.д. Параметр прогнозного отклика системы, полученный согласно уравнению 6, введенный в уравнение 7 как коррекция коэффициента усиления, эффективно корректирует сервореагирование системы, учитывая ожидаемые изменения в отклике системы. Этот выход затем корректируется с учетом потенциального смещения в сервореагировании воздействующего элемента, как в случае неодинакового сечения и несимметричных сервогидравлических воздействующих элементов, как показано в уравнении 8 в Таблице 1, ослабляется на заранее заданную и определенную пользователем постоянную коэффициента усиления системы, как показано в уравнении 9 в Таблице 1, и суммируется с компонентами сервонуля и подмешанной вибрации [уравнение 10 в Таблице 1] для подачи в итоге на вход приводного узла 308.
[0032] На фиг. 5 показана сервогидравлическая испытательная система по варианту настоящего изобретения. Эта испытательная система 500 имеет два соосных воздействующих элемента, а именно, верхний воздействующих элемент 504 и нижний воздействующий элемент 506. Верхний воздействующий элемент 504 оснащен датчиками 512 силы и смещения. Верхний воздействующий элемент 504 используется для проверки регулирования нагрузки на образец 502, опирающийся на нижний воздействующий элемент 506. Нижний воздействующий элемент 506 работает независимо в режиме управления рабочим ходом для имитации случайно переменной жесткости системы, воспринимаемой верхним воздействующим элементом 504, включая крайний случай изменения знака жесткости системы. К воздействующим элементам 504 и 506 соответственно прикреплены сжимающие пластины 508 и 510. Образец 502 (показанный на чертеже как пружина, работающая на сжатие) помещен между сжимающими пластинами 508 и 510. Верхний воздействующий элемент 504 предназначен для регулируемого приложения требуемой нагрузки к образцу 502. Нижний воздействующий элемент 506 предназначен для создания внешних возмущений в форме смещений. Верхний воздействующий элемент в разных схемах регулирования (перечисленных в Таблице 3), таким образом, испытывается на его способность управлять требуемыми статическими или динамическими нагрузками в присутствии циклических или случайных смещающих возмущений от нижнего воздействующего элемента, и сравнение показывает, что схема регулирования по настоящем изобретению превосходит известные схемы (см. Таблицу 3). Следует отметить, что во всех случаях, описанных ниже компонента прямой связи была обнулена при использовании схемы с прогнозным откликом системы.
[0033] Изучалась эффективность настоящего изобретения при регулировании квазистатической нагрузки верхним воздействующим элементом 504 как в отсутствии, так и в присутствии динамических смещающих возмущений, вводимых нижним воздействующим элементом 506. Записи, приведенные на фиг. 6-11, и их соответствующее описание иллюстрируют способность настоящего изобретения преодолевать эффекты прерывистого скольжения и трения во время изменения знака при воспроизведении волнообразной формы сигнала требуемой нагрузки.
[0043] На фиг. 6А-6С показаны временные диаграммы смещения верхнего воздействующего элемента и нагрузки для регулирования циклической нагрузки, прилагаемой с низким темпом при отсутствии внешних возмущений с использованием схем регулирования, перечисленных в Таблице 3.
Таблица 3
|
[0035] На фиг. 6А-6С, соответственно, показано регулирование циклической нагрузкой с низким темпом (средняя 2,0 кН, амплитуда 0,5 кН и частота 0,25 Гц) постоянной скорости верхним воздействующим элементом 504 со схемой регулирования 12 (фиг. 6А), схемой регулирования 2 (фиг. 6В) и схемой регулирования 3 (фиг. 6С). Можно заметить, что на этих диаграммах на фиг. 6А(а), 6В(а), 6С(а) кривые, представленные штриховыми линиями (---) и пунктирными линиями (...), соответственно, представляют команду нагружения и обратную связь по нагрузке, а фиг. 6A(b), 6B(b) и 6(C)b представляют обратную связь по смещению верхнего воздействующего элемента 504. Видно, что проблемы регулирования, заметные га фиг. 6А(а) во время перемены знака, уменьшаются на фиг 6В(а) и, кроме того, на фиг. 6С(а) видно улучшенное фазовое регулирование вместе с высокоточным отслеживанием формы волны команды.
Статическая нагрузка в присутствии возмущений
[0036] В этом разделе мы показываем характеристики схем регулирования, перечисленных в Таблице 3, при приложении требуемой нагрузки к образцу 502 верхним воздействующим элементом 504 в присутствии различных динамических возмущений, прилагаемых нижним воздействующим элементом 506 к образцу 502. В Таблице 4 показаны параметры случая динамической нагрузки (SED 1), прилагаемой нижним воздействующим элементом, в то время как верхний воздействующий элемент 504 нужен для циклической нагрузки с низким темпом и с постоянной скоростью при средней нагрузке -2,0 кН, амплитуде 0,5 кН и частоте 0,25 Гц. Результаты каждого испытания суммированы в наборе из двух кривых (например, фиг. 7 относится к временной диаграмме внешнего возмущения SED 1, приложенной нижним воздействующим элементом, а фиг. 8А-8С соответственно показывают поведение схемы 1 регулирования (фиг. 8А), схемы 2 (фиг. 8В) и схемы 3 (фиг. 8С) на верхнем воздействующем элементе 504 при регулировании требуемой статической циклической нагрузки в присутствии внешних возмущений SED 1). В этом случае также кривые на фиг. 8А(а), 8B(a) и 8C(a), представленные штриховыми линиями и пунктирными линиями, соответственно, представляют команду нагрузки и обратную связь по нагрузке, а на фиг. 8A(b), 8B(b) и 8C(b) представляют обратную связь по смещению верхнего воздействующего элемента 504. Как можно видеть, эффективность предложенного изобретения при требуемой статической нагрузке в присутствии различных динамических возмущений, превосходит известные решения. В таблице 4 показан случай возмущающей нагрузки на нижнем воздействующем элементе.
Таблица 4
|
Динамическая нагрузка
[0037] В этом разделе демонстрируется эффективности предложенной схемы регулирования динамических циклических нагрузок верхним воздействующим элементом 504 на образец 502 в отсутствии и в присутствии внешних динамических по природе возмущений. Целью является показать эффективность настоящего изобретения в преодолении эффектов нагрузок, вызванных инерцией и рассеянием при регулировании требуемых нагрузок с высокой точностью, даже когда свойства геометрии и материала образца изменяются под действием внешних возмущений.
Динамические нагрузки в отсутствии возмущений
Детали кривых и их дифференциация остаются прежними. В Таблице 5 показан случай динамической нагрузки (DY 1) для которого исследуется эффективность схем 1-3 регулирования. Фиг. 9А-9С, соответственно, соответствуют результатам, полученным для схем 1-3 регулирования для случая DY 1 динамической нагрузки с частотой 3 Гц. При регулировании динамических нагрузок в диапазоне 1-25 Гц настоящее изобретение со схемой 3 регулирования также превосходит две другие схемы регулирования.
[0039] Таблица 5 демонстрирует динамические нагрузки на верхний воздействующий элемент в отсутствии внешних возмущений.
Таблица 5
|
Динамические нагрузки в присутствии возмущений
[0040] В этом разделе сравниваются характеристики схем 1-3 регулирования требуемых нагрузок (верхним воздействующим элементом 504) на образец 502 в присутствии возмущающих нагрузок (нижним воздействующим элементом 506). Этот случай (DED 1) нагрузки сведен в Таблице 6 (приведенной ниже). Результаты, соответствующие этому случаю нагрузки показаны на двух чертежах. Например, для случая DED 1 нагрузки первый чертеж (фиг. 10) соответствует временной диаграмме возмущений от нижнего воздействующего элемента 506, а остальные три чертежа (фиг. 11А-11С), соответственно соответствуют временным диаграммам требуемой нагрузки, регулируемой способами 1-3 регулирования. Фиг 11D-11F соответствуют увеличенным фрагментам фиг. 11А-11С, Эти чертежи показывают, что в динамических условиях качество регулирования и точность визуализации формы волны регулирования требуемой нагрузки улучшаются при использовании настоящего изобретения. В Таблице 6 показаны случаи динамической нагрузки, прилагаемой к верхнему воздействующему элементу 504 при наличии внешних возмущений.
Таблица 6
|
[0041] Во всех исследованных случаях очевидно, что коррекция жесткости в реальном времени дает существенное улучшение по сравнению с возможностями известного способа ПИД-регулирования. Далее, очевидно, что настоящее изобретение дает небольшое, но заметное улучшение в качестве серворегулирования над коррекцией жесткости в реальном времени. Однако это достигается без необходимости в расчетах жесткости в реальном времени и без необходимости в связанной с ней обратной связи по рабочему ходу воздействующего элемента. Это подчеркивает важность применения компоненты расчетов выходного сервосигнала в отклике вычислительной системы прогнозным образом.
Испытания крыла летательного аппарата на динамические нагрузки
[0042] На фиг. 12 показан испытательный стенд, на котором реализована предлагаемая схема регулирования для демонстрации имитации нагрузок на решетчатую структуру, подобную крылу летательного аппарата, в которой распределенная нагрузка на консольную структуру крыла одновременно прилагается и регулируется с применением множества воздействующих элементов. Испытательный стенд содержит воздействующие элементы (1-8), основание (9) с Т-образными пазами, опорные колонны (10) с которыми жестко соединена структура (11) крыла, собранная из трех двутавровых балок, расположенных продольно, и девяти балок С-образного сечения, расположенных поперечно. На фиг. 13 показана эффективность предлагаемой схемы регулирования при имитации требуемых нагрузок на структуру крыла путем одновременного регулируемого приложения распределенных нагрузок, Детали приложенных распределенных нагрузок показаны в Таблице 7.
Таблица 7
|
[0043] Представленный вариант испытательных систем и способа испытаний образца позволяет следующее:
a. Использовать основную компоненту рассчитанного выходного сервосигнала для непрерывного прогнозирования ожидаемого отклика системы.
b. Отсутствует требование измерять любую обратную связь, кроме той, которая подвергается регулированию. Например, для регулирования нагрузки нет необходимости измерять обратную связь по положению.
c. Расчет прогнозного отклика системы не требует сложной цифровой модели системы.
d. Все вычисления, необходимые для серворегулирования ограничены соответствующим каналом. Это позволяет (i) проводить многоканальные испытания регулирования нагрузки без измерений смещения каждого воздействующего элемента (например, испытания крыла летательного аппарата с множеством воздействующих элементов на полетные нагрузки); и (ii) испытания на многоосевом вибростенде без необходимости в измерении силы или давления (например, испытания строительной структуры при нагрузках, возникающих при землетрясениях для измерения параметра системы, такого как жесткость).
e. Поскольку функция прогнозного отклика системы не включает никаких дополнительных измеренных параметров (кроме регулируемой обратной связи) или их производных, качество серворегулирования невосприимчиво к шуму сигнала в таком канале обратной связи. Это важно, особенно для более высоких испытательных частот.
f. Поскольку коррекция выходного сервосигнала основана на описании характеристик прогнозного отклика, фазовая задержка между управляющим сигналом и обратной связью может быть устранена без возвращения к схеме прямой связи, как в обычных системах PIDF.
g. Поскольку расчет прогнозного отклика системы учитывает, помимо прочего, параметры, мгновенной жесткости системы, такая схема позволяет улучшить сервореагирование даже при регулировании положения, улучшая точность формы волны положения и устраняя фазовую задержку.
h. Эта система по существу является самонастраивающейся, способной учитывать непрерывные изменения в отклике системы и, тем самым, делая ручную настройку избыточной.
i. Буквальное устранение запаздывания в сервореагировании, благодаря отслеживанию прогнозного отклика системы позволяет существенно увеличить максимальную испытательную частоту в многоканальных системах серворегулирования, как в случае полномасштабного испытания структур летательных аппаратов.
[0044] Следует понимать, что вышеприведенное описание является иллюстративным, а не ограничивающим. Из чтения и понимания вышеприведенного описания специалистам будут понятны многие другие варианты. Хотя настоящее изобретение было описано со ссылками на конкретные иллюстративные варианты, следует понимать, что изобретение не ограничивается ими, но может быть реализовано с изменениями и заменами в рамках изобретательской идеи и объема, определяемого приложенной формулой. Соответственно, описание и чертежи считаются иллюстративными, а не ограничивающими. Объем изобретения, однако, следует определять со ссылками на приложенную формулу наряду со всеми допустимыми эквивалентами, такой формулы.





















Сверло
Система электростатического распыления
Система подачи жидкости для распылительного устройства с подачей самотеком
Машина и способ маркировки или нанесения этикетки
Сварочный источник питания с цифровым управлением рабочим циклом
Двухдиафрагменный насос с пневмоприводом
Система сварки, содержащая систему индукционного нагрева, система индукционного нагрева и способ нагрева обрабатываемой сваркой или резанием детали
Система веб-конфигурации для настройки сварочных систем
Клейкая лента и способ изготовления клейкой ленты
Управление подводом тепла для сварочных систем

