Результат интеллектуальной деятельности: Адаптивная система помощи при движении задним ходом автомобиля с прицепом
Вид РИД
Изобретение
Адаптивная система помощи при движении задним ходом автомобиля с прицепом
Область техники, к которой относится изобретение
Предполагаемое изобретение относится к системам помощи водителю для транспортных средств, в частности, к системе помощи при движении задним ходом автомобиля с прицепом, обладающей низкими эксплуатационными затратами и повышенной точностью достижения цели управления даже при действии внешних неконтролируемых возмущающих воздействий.
Уровень техники
Для непрофессиональных водителей движение задним ходом автомобиля с прицепом является очень сложной задачей, особенно для тех, которые ездят с прицепом эпизодически, или часто меняют прицепы. Основной причиной сложности управления автомобилем в таком режиме является исходная неустойчивость объекта управления «автомобиль-прицеп» при движении назад. Это порождает ряд трудностей: необходимость управлять автомобилем непривычным способом, большая вероятность складывания системы даже при небольших ошибках управления, высокая трудность маневрирования задним ходом даже для профессионалов в условиях воздействия внешних неконтролируемых возмущений. К последним можно отнести: негоризонтальную поверхность, наличие существенных неровностей дороги, неодинаковость давления в шинах прицепа, переменную плотность почвы и разные условия сцепления колес, возникающих, например, на пашне, на почве с высокой влажностью, заснеженной поверхности, на песке и др.
Известны системы помощи при движении задним ходом автомобиля с прицепом, например, патент RU 2575663 С1, 22.08.2014, МПК B62D 13/06, G07C 5/08.
Патент посвящен системе помощи при движении задним ходом с прицепом в транспортном средстве. Здесь рассматривается система, в которой заранее вводятся кинематические параметры объекта «автомобиль-прицеп», задается водителем необходимая по условиям маневрирования кривизна пути прицепа на модуле ввода. На основе этих данных, а также показаний датчиков угла сцепки и угла поворота рулевых колес автомобиля, регулятор формирует закон управления рулевыми колесами автомобиля для обеспечения заданной кривизны пути прицепа. Закон управления строится на основе аналитической зависимости, связывающей заданную кривизну и текущий угол сцепки с необходимым углом поворота рулевых колес автомобиля. Система привода рулевых колес автоматически отрабатывает этот закон. Также предполагается контроль угла сцепки для устранения возможности складывания системы.
В патенте предлагается для сокращения эксплуатационных затрат по вводу необходимых кинематических параметров, связанных с прицепом, записывать их на метку (радиометка или штрих-код), устанавливаемую на прицеп. С помощью видеосистемы заднего вида, или специального радиооборудования считывать эти данные перед маневрированием.
К недостаткам такой системы помощи следует отнести то, что закон управления рассчитан на отсутствие внешнего неконтролируемого возмущающего воздействия, что снижает точность управления при наличии такового. Запись информации о прицепе на метку требует дополнительных затрат на изготовление такой метки и специальное оборудование.
Известен патент RU 2608786 С2, 17.04.2015, МПК B62D 1/24, B62D 13/06, B60W 30/00, который выбран в качестве прототипа предполагаемого изобретения.
Здесь предлагается структура системы помощи водителю, включающая следующие составные части: датчики угла сцепки, угла отклонения рулевых колес автомобиля и скорости движения; модуль ввода требуемого значения кривизны пути прицепа; контроллер, содержащий регулятор кривизны и регулятор угла сцепки; устройство автоматического привода рулевых колес автомобиля; человеко-машинный интерфейс. Водитель перед маневрированием назад должен ввести кинематические параметры объекта «автомобиль-прицеп» и задать требуемое значение кривизны пути прицепа. Далее водителю предлагается управлять только скоростью движения и по мере продвижения назад уточнять заданную кривизну. При этом регулятор кривизны по заданному значению таковой формирует на основе аналитической зависимости требуемое динамическое значение угла сцепки. Этот сигнал ограничивается величиной угла складывания (для устранения возможности складывания объекта «автомобиль-прицеп»), и далее отслеживается в замкнутом контуре, организованном регулятором угла сцепки с использованием обратной связи по текущему углу сцепки и ПИ-регулятора. Выходной сигнал этого регулятора подается на устройство привода рулевых колес автомобиля. Последнее, отрабатывая поступивший сигнал, отклоняет рулевые колеса автомобиля и обеспечивает движение прицепа с заданной кривизной.
Недостатком этой системы является необходимость измерения кинематических параметров объекта «автомобиль-прицеп» и их ввода в систему управления. Это указывает на значительные эксплуатационные затраты, связанные с использованием рассматриваемой системы помощи водителю, особенно при частой смене прицепов.
Еще одним недостатком является то, что для компенсации внешних стационарных неконтролируемых возмущений, действующих на систему «автомобиль-прицеп», в законе управления используется интегральная обратная связь по ошибке угла сцепки. Она требует дополнительной настройки коэффициента этой связи и использования информация о текущей скорости движения. Это связано с усложнением системы и соответствующими дополнительными затратами.
В качестве аналога предполагаемого изобретения можно еще привести патент RU 2627219 С2, 17.07.2015, МПК B60W 30/00. Он практически повторяет предыдущий рассмотренный патент, но для маневрирования назад предлагает дополнительно использовать тормоза прицепа Нужно отметить, что данное изобретение распространяется только на прицепы с наличием тормозов. Остальные недостатки здесь те же самые.
Раскрытие изобретения
Задачей предполагаемого изобретения является снижение эксплуатационных затрат по использованию системы помощи водителю за счет создания системы с автонастройкой и/или адаптивной в текущем времени системы управления с использованием принципа управления по заданному балансировочному углу сцепки.
Данная задача реализуется за счет того, что при маневрировании назад предлагается водителю управлять прицепом посредством заданного балансировочного значения угла сцепки (значение угла сцепки после завершения переходного процесса). Водитель будет его задавать, а система управления отрабатывать. При малости времени переходного процесса, либо плавности задания этого угла, он является практически текущим значением угла сцепки. Для реализации этого в системе управления предлагается возможность сократить время переходного процесса путем введения регулируемого коэффициента закона управления. Такой подход с контролем угла отклонения прицепа от продольной оси автомобиля, что и является углом сцепки, вполне естественен для водителя в задаче маневрирования назад с объездом препятствий, въезда в створ ворот приусадебного участка и т.п.
Поэтому в контроллере не требуется строить регулятор кривизны пути прицепа, а возможное превышение заданного значения угла сцепки в виде угла складывания устранять путем ограничения заданного угла сцепки непосредственно.
Для устранения необходимости вводить кинематические параметры, предлагается в контроллере реализовать алгоритм текущей параметрической идентификации (идентификатор) дифференциального уравнения, описывающего динамику изменения угла сцепки объекта управления «автомобиль-прицеп». Этот идентификатор может использоваться для предварительного получения и запоминания оценок кинематических параметров системы на любом маневре (система с автонастройкой), либо для текущего оценивания прямо в процессе целевого управления и использования текущих оценок для формирования закона управления рулевыми колесами автомобиля (адаптивная в текущем времени система управления). Получаемые оценки параметров объекта также используются для формирования ограничений заданного балансировочного угла сцепки и коэффициента закона управления.
Последний вариант системы управления отличается тем, что система управления настраивается под текущие характеристики объекта управления, поэтому обладает более высокими потенциальными возможностями по точности реализации заданного угла сцепки даже при действии неконтролируемого ограниченного возмущающего воздействия. Полная реализация этих возможностей ограничивается такими факторами как: погрешности датчиков информации, использование внутренней фильтрации в системе и т.п.
Краткое описание чертежей
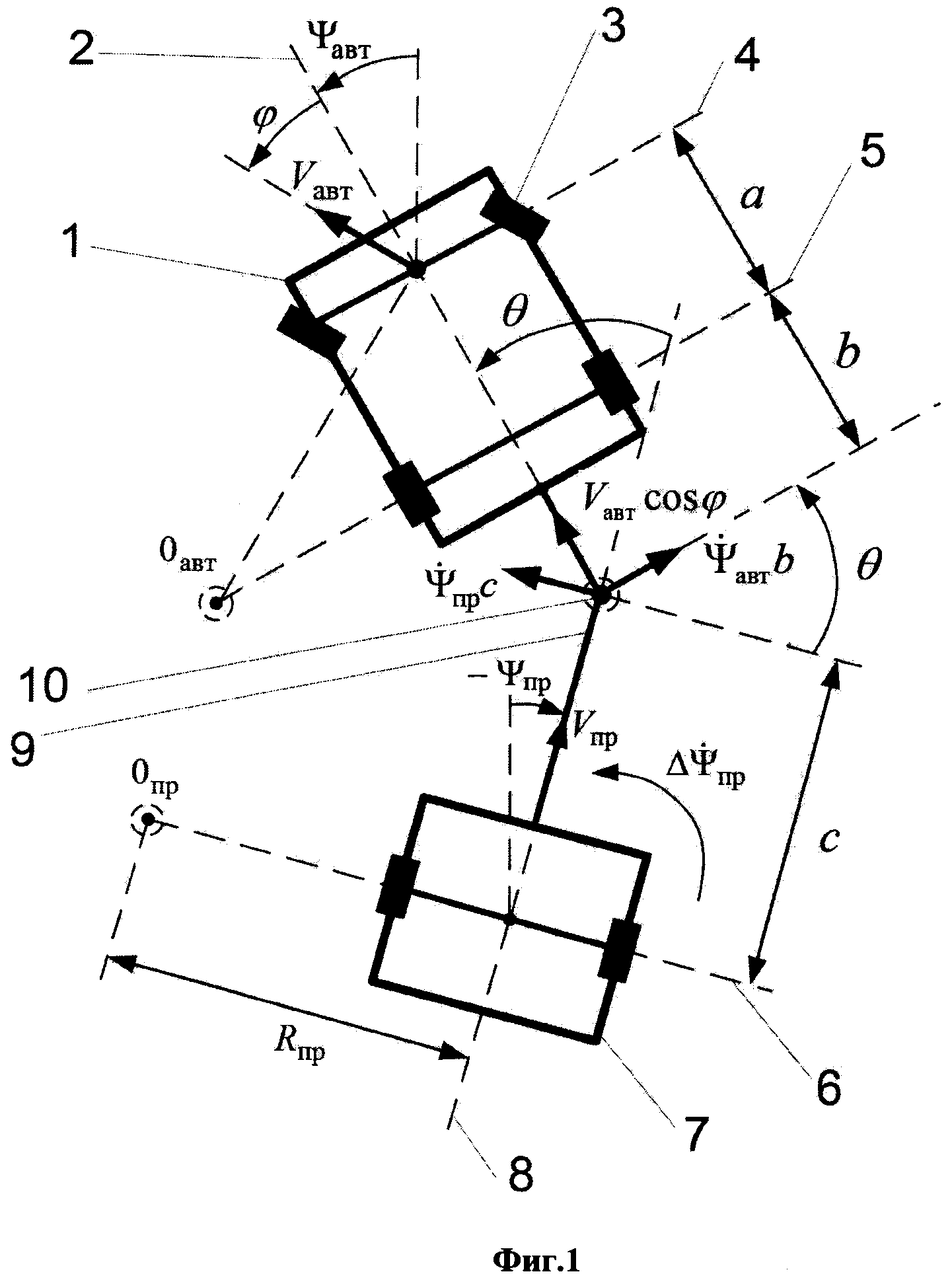
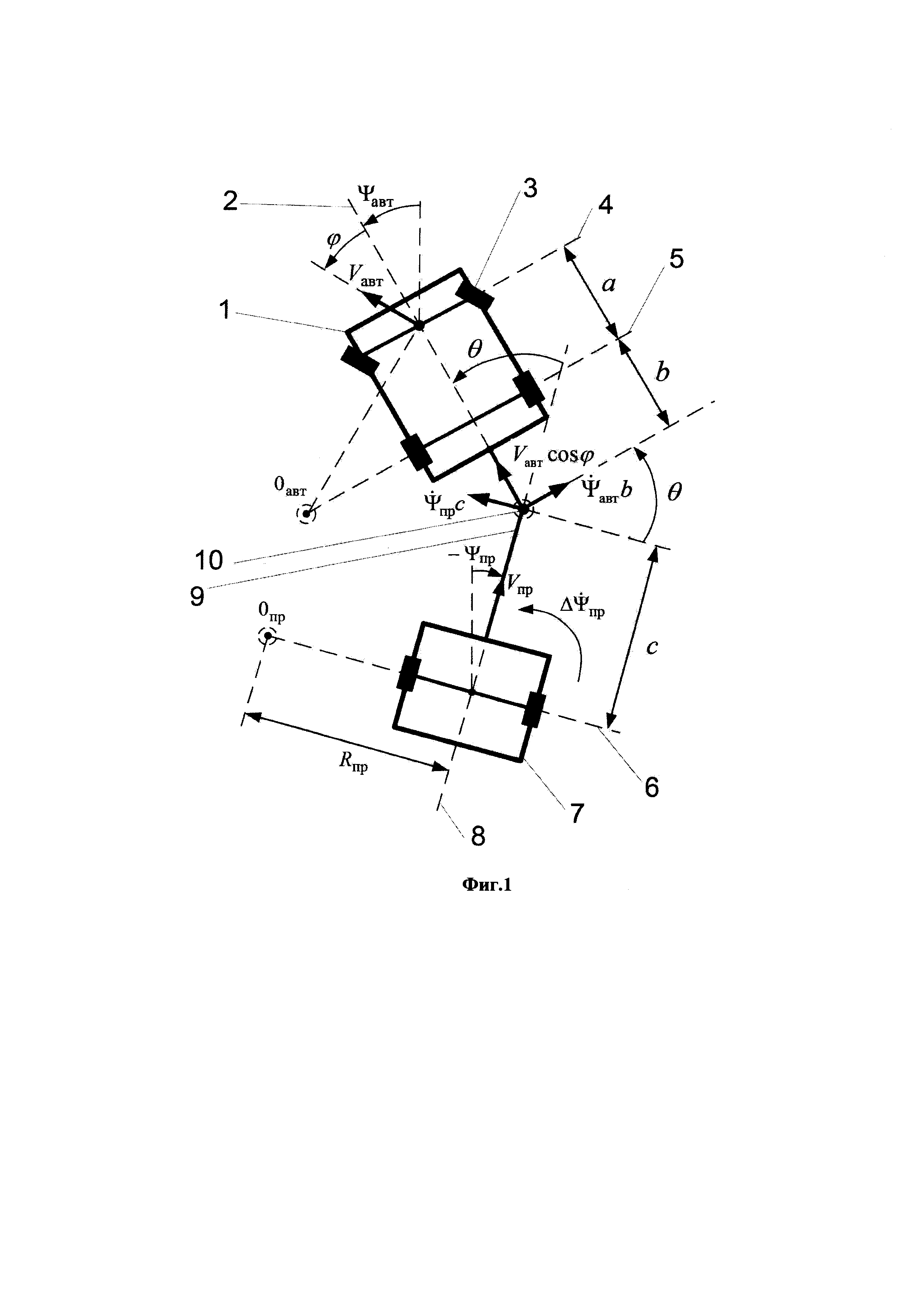
На фиг. 1 представлены основные кинематические соотношения объекта управления «автомобиль-прицеп» (вид сверху).
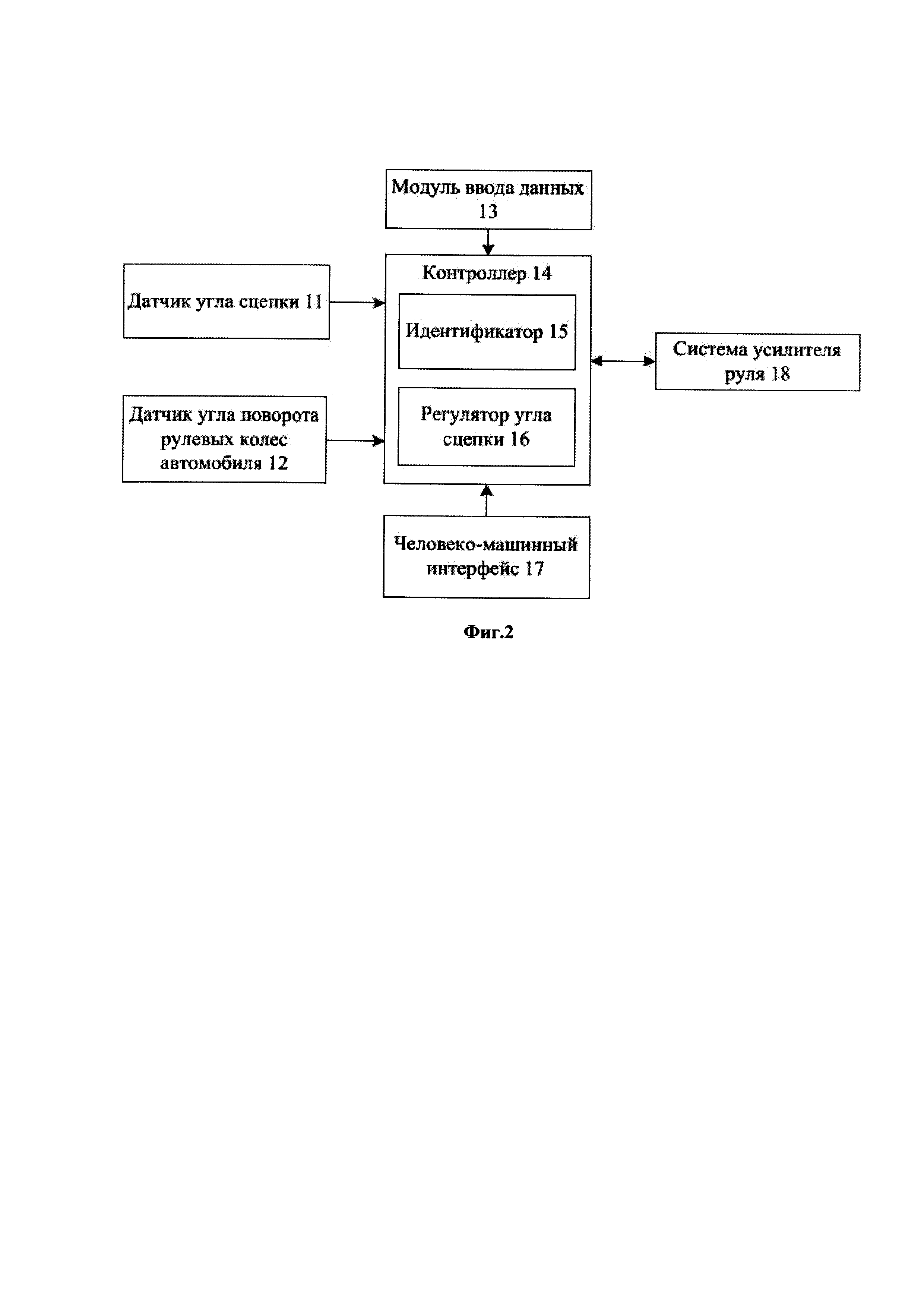
На фиг. 2 представлена структура предлагаемой системы управления.
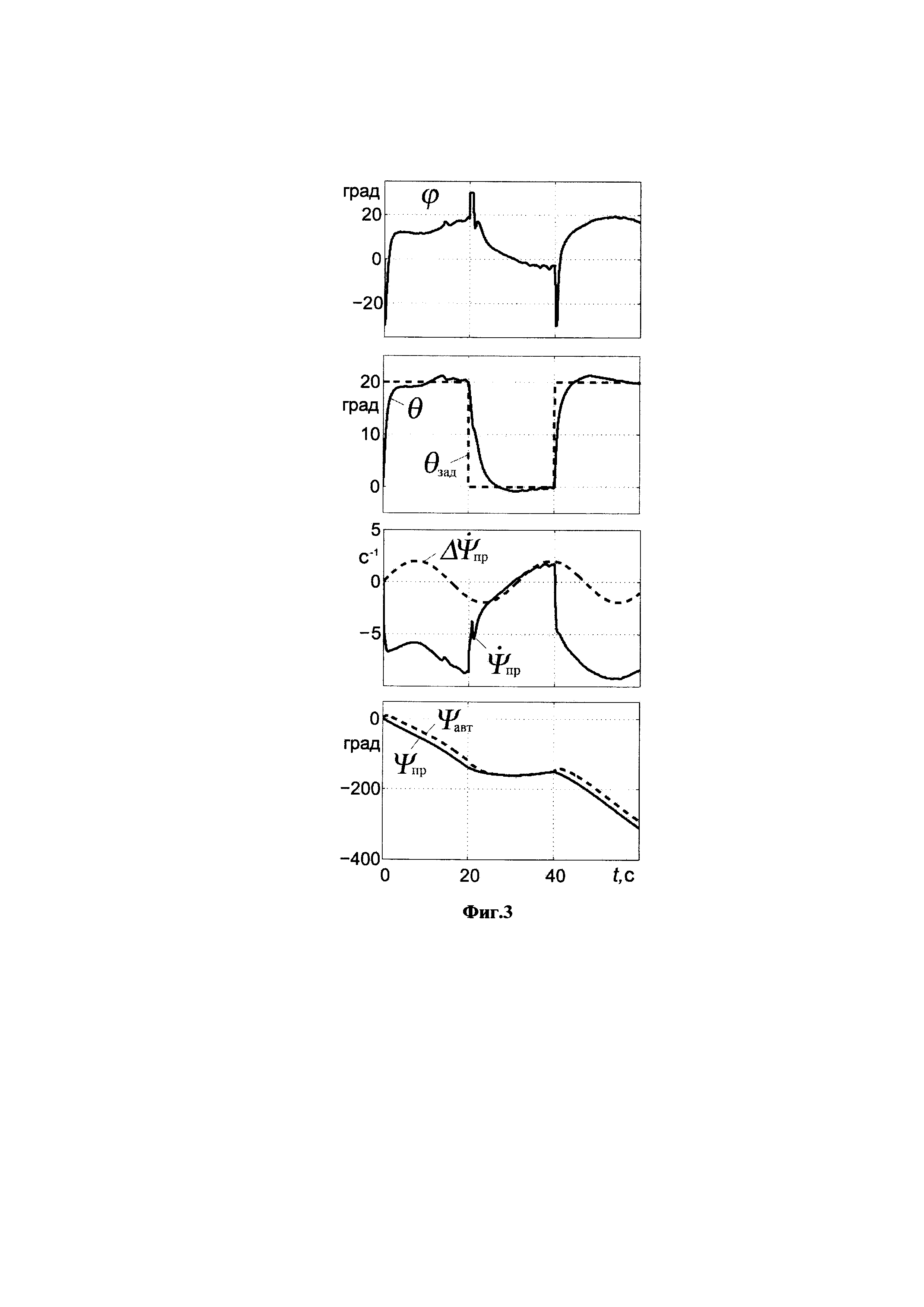
На фиг. 3 представлены результаты исследования управления объектом «автомобиль-прицеп» при движении назад с реализацией адаптивного в текущем времени закона управления.
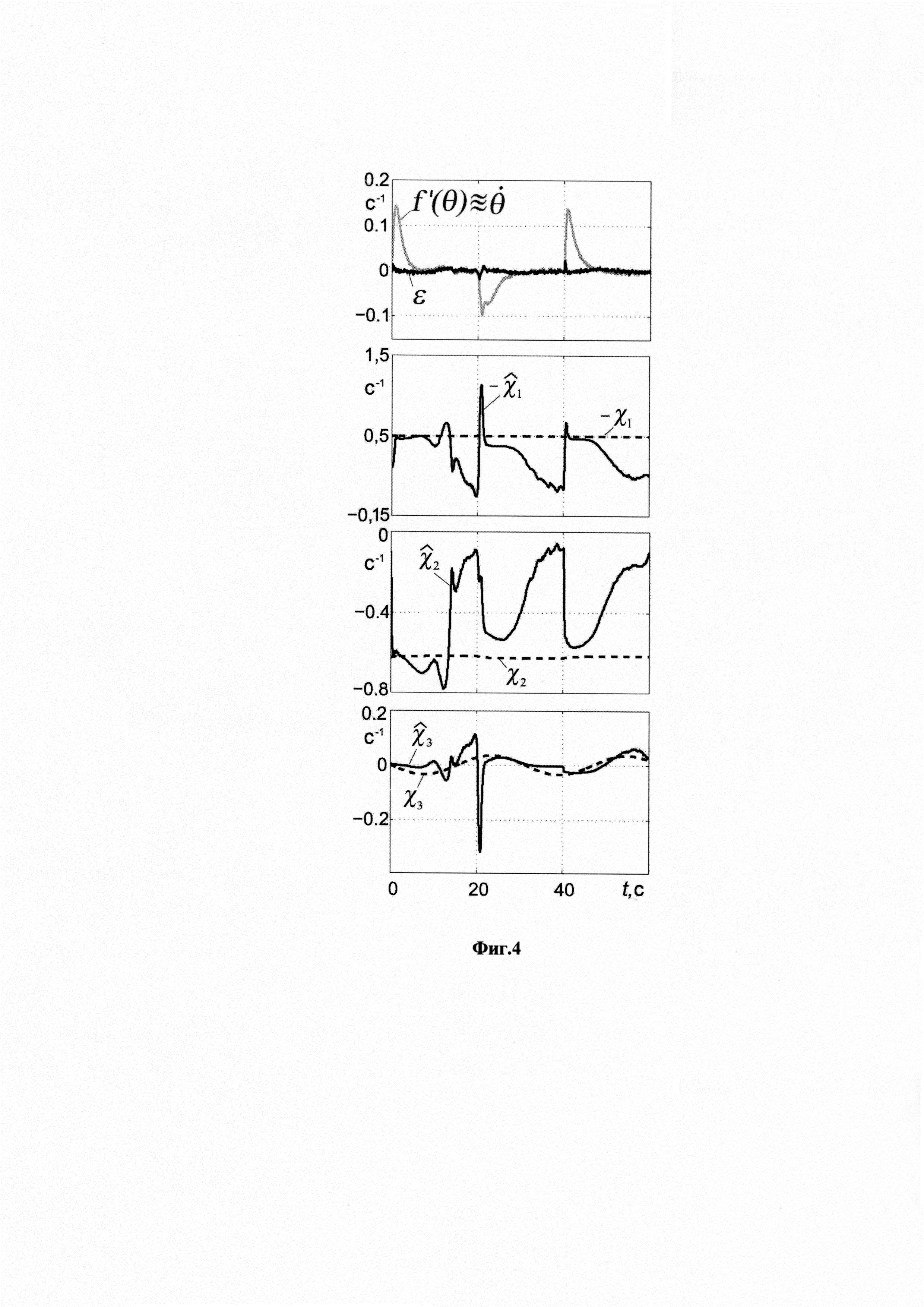
На фиг. 4 представлен процесс текущей идентификации при исследовании функционировании адаптивного в текущем времени управления.
Осуществление изобретения
На фиг. 1 и в дальнейших рассуждениях приняты следующие обозначения:
1 - автомобиль; 2 - продольная ось автомобиля; 3 - рулевые колеса автомобиля; 4 - ось рулевых колес автомобиля; 5 - ось заднего моста автомобиля; 6 - ось колес прицепа; 7 - прицеп; 8 - продольная ось прицепа; 9 - дышло прицепа; 10 - точка сцепки дышла прицепа с автомобилем;
ϕ - угол отклонения рулевых колес автомобиля 3, ограничен в виде: ⎜ϕ⎜≤ϕmax; обычно это ограничение не превышает величину 30°, поэтому примем: ϕmах=30°;
θ - угол сцепки, или угол отклонения продольной оси прицепа 8 от продольной оси автомобиля 2, примем, что ⎜θ⎜≤90°; значение модуля угла сцепки, при превышении которого во время движения назад начинается непроизвольное увеличение ⎜θ⎜ с невозможностью его компенсации из-за ограниченности ϕ называется углом складывания (θскл);
Ψавт, Ψпр - угол поворота автомобиля 1 и прицепа 7 (соответственно) от какого-то направления, например, заданного (на рисунке обозначено вертикальной линией);
Vавт, Vпр - скорость автомобиля 1 и прицепа 7, соответственно, скорость автомобиля будем измерять по рулевым колесам 3 с точкой приложения в центре оси вращения рулевых колес 4;
0авт, 0пр - центры (точки) вращения автомобиля 1 и прицепа 7 на повороте соответственно;
Rпр - радиус вращения прицепа 7, измеряемый вдоль оси вращения колес прицепа 6 (эффективной оси для многоосного прицепа);
а, b, с - кинематические параметры объекта управления «автомобиль-прицеп» (а, с - положительные ненулевые числа), соответственно: колесная база автомобиля, или расстояние между осями вращения колес автомобиля (4 и 5); расстояние от оси заднего моста автомобиля 5 до точки сцепки 10; расстояние от точки сцепки 10 дышла прицепа 9 до оси вращения колес прицепа 6 (эффективной оси для многоосного прицепа); отметим, что обычно а>⎢b⎢, c>⎢b⎢, дополнительное требование к этим параметрам определится далее;
 - угловая скорость прицепа 7, появляющаяся из-за внешних неконтролируемых возмущений, природа возникновения которых указана выше; будем считать эту величину ограниченной.
- угловая скорость прицепа 7, появляющаяся из-за внешних неконтролируемых возмущений, природа возникновения которых указана выше; будем считать эту величину ограниченной.
Для составления математического описания объекта управления «автомобиль-прицеп» приняты следующие допущения:
- автомобиль движется с относительно низкой скоростью;
- не будут учитываться эффект боковой податливости шин, боковой юз автомобиля;
- не учитывается динамика движения, в частности, получаемые соотношения не зависят от ускорений.
Известно [Мирошниченко А.Н. Основы теории автомобиля и трактора. - Томск: Изд-во ТГАСУ, 2014. - 490 с], что угловая скорость автомобиля определяется зависимостью:

Из фиг. 1 можно определить, что

На точку сцепки 10 при движении автомобиля действуют два вектора линейной скорости: вектор поступательного движения автомобиля, соответствующий продольной скорости автомобиля (Vавтcosϕ), и вектор  , соответствующий вращательному движению автомобиля. Исходя из этих векторов, определим линейную и угловую скорость прицепа. Путем проекции указанных векторов на продольную ось прицепа найдем скорость прицепа:
, соответствующий вращательному движению автомобиля. Исходя из этих векторов, определим линейную и угловую скорость прицепа. Путем проекции указанных векторов на продольную ось прицепа найдем скорость прицепа:

Подставляя сюда выражение для  по зависимости (1), найдем
по зависимости (1), найдем

Угловая скорость прицепа определяется вектором линейной скорости  перпендикулярным продольной оси прицепа (см. фиг. 1). Из кинематической схемы ясно, что при
перпендикулярным продольной оси прицепа (см. фиг. 1). Из кинематической схемы ясно, что при  :
:

Также делая подстановку по (1), и учитывая ненулевое в общем случае возмущающее воздействие, найдем:

Поскольку из (2) следует, что  , то по зависимостям (1) и (4) несложно определить скорость изменения угла θ:
, то по зависимостям (1) и (4) несложно определить скорость изменения угла θ:

Зависимость (5) можно переписать по-другому, используя известное равенство [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М: Наука, Гл. ред. физ.-мат. лит., 1986. - 177 с. ]:  . Комбинируя по этой формуле синусы и косинусы по ϕ, можно найти:
. Комбинируя по этой формуле синусы и косинусы по ϕ, можно найти:

где  - положительный коэффициент усиления (утверждение о положительности легко установить из принятых условий);
- положительный коэффициент усиления (утверждение о положительности легко установить из принятых условий);
 - балансировочная зависимость угла рулевых колес автомобиля по углу θ; или значение ϕ такое, что если его зафиксировать, то при
- балансировочная зависимость угла рулевых колес автомобиля по углу θ; или значение ϕ такое, что если его зафиксировать, то при  текущее значение угла сцепки будет находиться в балансировочном положении:
текущее значение угла сцепки будет находиться в балансировочном положении:  , или объект «автомобиль-прицеп» будет находиться в установившемся развороте, причем как при движении вперед, так и назад;
, или объект «автомобиль-прицеп» будет находиться в установившемся развороте, причем как при движении вперед, так и назад;
 - параметр линеаризации функции ϕбал(θ) около точки θ=0;
- параметр линеаризации функции ϕбал(θ) около точки θ=0;
 - производная функции ϕбал(θ) по своему аргументу.
- производная функции ϕбал(θ) по своему аргументу.
Изучим динамику изменения угла θ в соответствии с равенством (6) при движении вперед (Vавт>0) и отсутствии внешнего возмущения 
Для этого рассмотрим вначале производную функции ϕбал(θ). Из ее значения можно видеть, что если параметры а, b, с все положительные, тогда в полном диапазоне изменения угла сцепки λ(θ)>0, т.е. функция ϕбал(θ) является возрастающей. Если параметр b отрицательный, тогда для указанного свойства требуется условие

где ⎢θ⎢max - максимально возможное значение модуля угла сцепки. Будем понимать условие (7) как дополнительное условие при отрицательном параметре b, которое считаем выполненным.
Далее рассмотрим случай, когда значение угла рулевых колес автомобиля удовлетворяет условиям:  ,
,  , т.е. текущее положение рулевых колес автомобиля меньше, чем балансировочное значение, соответствующее текущему углу θ. Из зависимости (6) следует, что это порождает
, т.е. текущее положение рулевых колес автомобиля меньше, чем балансировочное значение, соответствующее текущему углу θ. Из зависимости (6) следует, что это порождает  , т.е. уменьшение угла θ. А поскольку функция ϕбал(θ) возрастающая, то при этом будет уменьшаться и сам эта функция. Это будет продолжаться до тех пор, пока не наступит равенство ϕбал(θбал)=ϕ.
, т.е. уменьшение угла θ. А поскольку функция ϕбал(θ) возрастающая, то при этом будет уменьшаться и сам эта функция. Это будет продолжаться до тех пор, пока не наступит равенство ϕбал(θбал)=ϕ.
Аналогичные рассуждения можно построить и для случая ϕбал(θ)<ϕ≡const. А это значит, что при движении вперед (Vавт>0) при постоянном угле поворота рулевых колес θ→θбал≡const, где последний соответствует назначенному углу ϕ. То есть движение системы по углу сцепки является устойчивым.
Если же автомобиль движется назад (Vавт<0) - из подобных рассуждений следует, что система точно неустойчива, чем объясняются все проблемы управления таким движением. При этом уравнение (6) будет иметь вид:

Используя подход, подобный тому, что был применен при выводе уравнения (6), можно найти зависимость, обратную к ϕбал(θ):

В силу возрастающего характера функции ϕбал(θ) следует, что максимальное значение угла поворота рулевых колес автомобиля (ϕmax) соответствует максимальному значению модуля реализуемого балансировочного значения угла сцепки при движении вперед  Следует отметить, что при движении назад из-за неустойчивости системы этот угол имеет смысл угла складывания (θскл). Из (9) следует:
Следует отметить, что при движении назад из-за неустойчивости системы этот угол имеет смысл угла складывания (θскл). Из (9) следует:

Из полученных соотношений (3) и (4) можно найти кривизну пути прицепа (κ) при отсутствии возмущения:

Найдем также кривизну пути прицепа на установившемся движении (повороте) с заданным значением ϕ≡const≠0 в отсутствии внешнего возмущения. По выше изложенному этому движению соответствует θ=θбал≡const по (9). Значение кривизны пути прицепа для этого случая также назовем балансировочным значением (κбал). Из (6) и (11) непосредственной подстановкой несложно найти:

где приблизительная зависимость получена линеаризацией около θбал=0. Это соотношение указывает, что управление по сигналу θбал в приблизительно пропорциональной зависимости соответствует управлению по кривизне пути прицепа, и поэтому может заменить последнее. Это и реализуется в предполагаемом изобретении.
Уравнения (1) - (12) с принятыми допущениями описывают кинематические и связанные с ними динамические соотношения объекта управления «автомобиль-прицеп», необходимые для синтеза закона управления при движении задним ходом. Приблизительные равенства в соотношениях (6), (9), (10), (12) в силу их определения точно описывают соответствующие им зависимости в области нулевого значения углов. При увеличении модуля углов погрешность увеличивается, но как показывают расчеты для типовых практических задач с ограничением ϕmах=30° погрешность не превышает 10-15%. Также заметим, что из анализа зависимостей следует, что величина  , определенная из (10) по линейному приближению, меньше точного значения.
, определенная из (10) по линейному приближению, меньше точного значения.
Вначале рассмотрим неадаптивный вариант управления. Это соответствует случаю, когда параметры системы a, b, с являются известными.
Будем считать, что заданное балансировочное значение угла сцепки (обозначим его как θзад) будет формироваться водителем на дополнительном органе водителя. При этом для устранения возможности складывания системы этот сигнал ограничивается на основании (10) очевидным неравенством:

с использованием линейного приближения, а значит, как указывалось, с запасом 10-15%. Предложим закон управления:

где kЗУ - положительный коэффициент закона управления, который влияет на скорость переходного процесса и снижение влияния внешнего возмущения; предполагаем, что этот параметр находится внутри ограничения:

Это требование вытекает из последующих рассуждений.
Действительно, если закон управления (14) подставить в уравнение (8), получим описание динамики угла сцепки в замкнутой системе управления при движении назад:

где приблизительное равенство приведено по линейному приближению и зависимостям по (6). Очевидным требованием устойчивости и пропорциональности управления в отсутствии возмущения здесь является то, чтобы модуль аргумента синуса не превышал величину π/2. Отсюда следует верхнее ограничение (15).
Рассмотрим случай отсутствия внешнего возмущения  Считая сигнал θзад постоянным, из точного равенства (16) несложно найти при назначенных ограничениях, что θ→θзад ≡ const. Это в свою очередь приводит по (14) ϕ→ϕбал(θзад)≡const. Налицо устойчивое поведение объекта управления, в частности, устойчивый поворот. Причем, сравнивая приблизительную часть (16) с уравнением динамики при движении вперед (6), можно видеть, что при kЗУ=1 динамика движения объекта «автомобиль-прицеп» при движении назад приблизительно такая-же, что и при движении вперед с ϕ=ϕбал(θзад)≡const. Если kЗУ увеличить, то увеличится и скорость переходного процесса.
Считая сигнал θзад постоянным, из точного равенства (16) несложно найти при назначенных ограничениях, что θ→θзад ≡ const. Это в свою очередь приводит по (14) ϕ→ϕбал(θзад)≡const. Налицо устойчивое поведение объекта управления, в частности, устойчивый поворот. Причем, сравнивая приблизительную часть (16) с уравнением динамики при движении вперед (6), можно видеть, что при kЗУ=1 динамика движения объекта «автомобиль-прицеп» при движении назад приблизительно такая-же, что и при движении вперед с ϕ=ϕбал(θзад)≡const. Если kЗУ увеличить, то увеличится и скорость переходного процесса.
Такие рассуждения будут справедливыми при отсутствии внешнего возмущения, даже если синтезированное по (14) управление выходит на ограничение: ⎢ϕ⎢≤ϕmax. При выходе угла поворота рулевых колес на свой конструктивный максимум будет просто ограничиваться скорость переходного процесса и, соответственно, затягиваться переходный процесс (по сравнению с «безлимитным» управлением).
Таким образом, закон управления (14) при движении объекта «автомобиль-прицеп» назад после переходного процесса при указанных условиях обеспечивает такое же устойчивое поведение системы, как и при движении вперед.
Если на прицеп действует внешнее возмущение  , то на установившемся режиме (
, то на установившемся режиме ( ) при линейных приближениях установившееся значение угла сцепки (θуст) выражается как:
) при линейных приближениях установившееся значение угла сцепки (θуст) выражается как:

Поскольку θуст ≠ θзад, то и остальные параметры движения не будут соответствовать ожидаемым. Но из равенства (17) можно видеть, что выбором kЗУ>1 можно ослабить влияние внешнего возмущения.
В силу вынужденной неточности управления при воздействии внешнего возмущения, сам закон управления может быть упрощен: вместо (14) можно записать:

Он отличается от закона (14) только приблизительным заданием функции ϕбал(θ), рассмотрим, что он дает. Его можно переписать как

где  - новое заданное значение угла сцепки, смещенное из-за неточности назначения ϕбал(θ). Здесь по аналогичным рассуждениям, используемым при обсуждении (16), следует, что
- новое заданное значение угла сцепки, смещенное из-за неточности назначения ϕбал(θ). Здесь по аналогичным рассуждениям, используемым при обсуждении (16), следует, что  , но при увеличении параметра kЗУ указанная неточность уменьшается.
, но при увеличении параметра kЗУ указанная неточность уменьшается.
Моделирования системы управления с законами управления (14) и (18) указывают на их справедливость.
Полученные выше соотношения используем как основу для формирования предлагаемых законов управления: с самонастройкой и с текущей адаптируемостью.
Формирование управления с самонастройкой. Это соответствует случаю, когда параметры системы а, b, с являются априорно неизвестными.
Для реализации закона управления (14) необходимо знать параметр λ0 и функцию ϕбал(θ), а для закона управления (18) - лишь параметр λ0. Их оценки можно получить путем определения коэффициентов дифференциального уравнения (5), описывающего динамику угла сцепки, на любом маневре объекта «автомобиль-прицеп».
Для этого преобразуем равенство (5) в следующий вид:


где χ - вектор неизвестных параметров; у - вектор регрессоров (в терминах регрессионного анализа); верхний индекс «т» обозначает операцию транспонирования; ƒ(⋅) - операция низкочастотной фильтрации для устранения высокочастотных помех измерений; ƒ'(⋅) - операция такой же низкочастотной фильтрации с одновременным дифференцированием по времени аргумента.
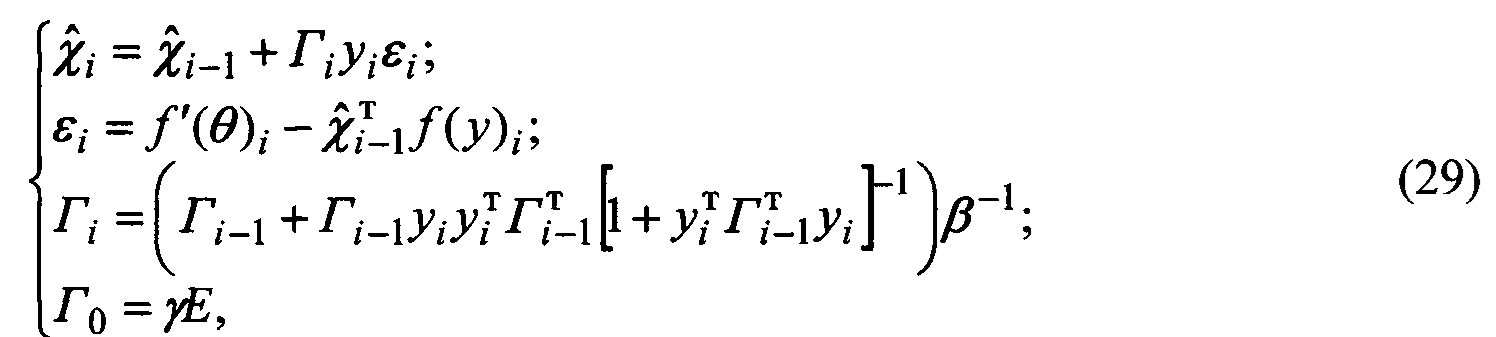
Измеряя сигналы ϕ, θ в текущем времени на маневре и используя, например, метод наименьших квадратов [Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. - М.: Наука, 1991. - 432 с.], можно определить оценку вектора неизвестных параметров с помощью следующего алгоритма идентификации (идентификатора):

где «крышка» над символом означает его оценку; i=0, 1, 2, …, N - номера дискретных измерений и соответствующих им вычислений с конечным номером N, который, как вариант, может определяться автоматически путем алгоритмического анализа со стороны контроллера факта достижения невырожденности и достаточной степени обусловленности матрицы Р; временная дискретность измерения переменных достаточно малая в сравнении с переходным процессом в системе.
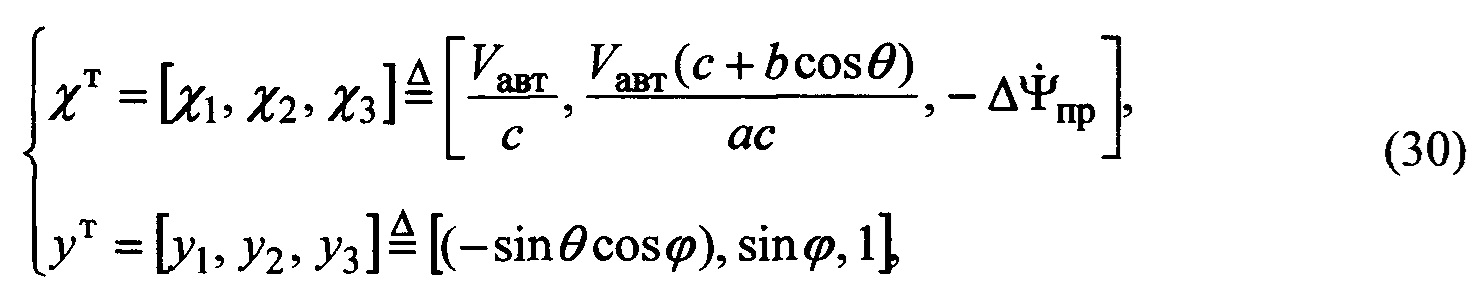
Несложно определить, что искомые оценки находятся по зависимостям:

На основе этих оценок закон управления с самонастройкой, соответствующий (14), и ограничения (13) и (15) будут иметь вид соответственно:



Для реализации закона (18) с самонастройкой алгоритм идентификации можно упростить. Так при идентификации можно использовать только выборки информации, соответствующие малым углам θ, например ⎢θ⎢≤15°. Тогда в представлении (19) и алгоритме (21) можно принять:

Тогда оценка  и закон управления (18) с самонастройкой запишутся как:
и закон управления (18) с самонастройкой запишутся как:

 I
I
Исследование алгоритмического обеспечения системы с автонастройкой (19) - (28) показали его высокую эффективность.
Формирование адаптивного в текущем времени управления. Здесь считается, что параметры а, b, с в текущем времени неизвестны (меняются) и действует значительное внешнее неконтролируемое возмущение, которое требуется парировать законом управления.
Для устранения указанной неопределенности будем использовать алгоритм текущей параметрической идентификации для уравнения динамики изменения угла сцепки (5) при движении задним ходом.
В качестве алгоритма текущей идентификации (идентификатора) используем рекуррентный алгоритм текущей идентификации с фактором забывания [Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. - М.: Наука, 1991. - 432 с.], обеспечивающий наилучшую скорость сходимости оценок:
где χ - вектор неизвестных параметров; у - вектор регрессоров; Гi - матричный коэффициент усиления алгоритма идентификации; εi - невязка идентификации; γ - большое положительное число; Е - единичная матрица размера 3×3; 0<<β<1 - назначаемый фактор забывания прошлых измерений для того, чтобы алгоритм отслеживал изменение искомых параметров.
Алгоритм текущей идентификации (29) обеспечивает с первых шагов своей работы сходимость модуля невязки идентификации в область, близкую к нулю [Круглов С.П. Условия адаптируемости систем управления с идентификатором и эталоном: монография // LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbucken, Deutschland - 2012, 125 с. ]. Это можно наблюдать и по результатам исследований на фиг. 4. Поэтому, вместо зависимости (19), возвращаясь к исходному соотношению без частотной фильтрации, можно записать в дискретном виде динамику угла сцепки при движении назад через текущие оценки неизвестных параметров:

где  ;
;  ;
; 
Назначим неявную устойчивую эталонную модель, записанную также в дискретном виде:

где θм - выходная переменная модели, соответствующая θ; ам - назначенный положительный параметр модели; kЗУ - коэффициент закона управления, предназначенный для регулирования скорости протекания переходного процесса в замкнутой системе с учетом ам.
Приравнивая левые части уравнений (31) и (32), подставляя вместо θмi; величину θi, можно найти закон управления, который будет обеспечивать поведение угла сцепки в замкнутой системе управления такое, которое предписано эталоном (32):

Действительно, если выражение (33) подставить в (31), то получим динамику замкнутой системы управления при начальном значении θ0 в виде:
Для исключения появления в замкнутой адаптивной системе управления высокочастотных колебаний требуется пропускать закон управления (33) через низкочастотный фильтр, устраняющий высокочастотные составляющие работы алгоритма идентификации (29), но не вносящий существенных искажений в низкочастотный, относительно указанного, процесс управления [Круглов С.П. Условия адаптируемости систем управления с идентификатором и эталоном: монография // LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbucken, Deutschland - 2012, 125 с.]. При этом не требуется точного оценивания неизвестных параметров (реализован принцип «упрощенных условий адаптируемости»).
Ограничение заданного угла сцепки здесь также будет иметь вид (24). Для получения оценки  предлагается, как вариант, реализацию дополнительного алгоритма (29), но уже с использованием выборок, отвечающих условию ⎢θ⎢≤15°, т.е. с параметрами и регрессорами в виде (26). По результирующим оценкам от этого алгоритма использовать соотношения (27) и (24).
предлагается, как вариант, реализацию дополнительного алгоритма (29), но уже с использованием выборок, отвечающих условию ⎢θ⎢≤15°, т.е. с параметрами и регрессорами в виде (26). По результирующим оценкам от этого алгоритма использовать соотношения (27) и (24).
Ограничение kЗУ здесь на основании (33) будет:

Поскольку адаптивная система управления подстраивается под текущие характеристики системы управления, то синтезируемый закон управления учитывает все неточности и допущения в исходном описании кинематики и динамики системы управления, за исключением, конечно, ограничений.
На фиг. 2 представлена структура предлагаемой системы управления.
Информация об угле сцепки, угле поворота рулевых колес автомобиля поступают с датчика угла сцепки 11 и датчика угла поворота рулевых колес автомобиля 12 в контроллер 14. Принципы построения датчиков 11 и 12 могут быть любыми, но из общей концепции заявки на изобретение желательно, чтобы они не требовали дополнительных эксплуатационных затрат на настройку, калибровку и т.п. В контроллер 14 также поступают сигналы о заданном балансировочном угле сцепки и коэффициенте усиления закона управления, выбираемом водителем на модуле ввода данных 13. Этот модуль может быть построен по предложениям прототипа, только имеет две ручки по количеству задаваемых сигналов. Заданный балансировочный угол сцепки выбирает водитель в процессе маневрирования задним ходом по обзору через зеркала или видеосистему заднего вида автомобиля.
Контроллер 14 в своем составе имеет идентификатор 15 и регулятор угла сцепки 16. Идентификатор 15, построен по зависимостям (19), (20), (21), либо (19), (26), (21) (в соответствии с первым вариантом предлагаемого способа), и по зависимостям (19), (29), (30), а также дополнительно по зависимостям (19), (26), (30) (по второму варианту предлагаемого способа). При этом по первому варианту идентификатор работает только однократно по сигналу водителя на предварительном маневре с изменением угла сцепки с запоминанием вычисленных оценок кинематических параметров объекта управления. Наиболее целесообразно это выполнять при движении вперед. Запомненные оценки в дальнейшем используются для формирования ограничения заданного угла сцепки по (24) и для формирования закона управления (23) или (28). По второму варианту идентификатор реализует алгоритм (29) постоянно в процессе управления, при этом он формирует два набора оценок: первый соответствует углам сцепки с полным диапазоном своих изменений в соответствии с (30) (оценки используются для формирования закона управления (33) и ограничения коэффициента закона управления (34)), второй соответствует малым значениям углам сцепки по модулю по (26) (оценки используются для формирования ограничения заданного угла сцепки (24)).
Регулятор угла сцепки 16 в соответствии с первым вариантом предлагаемого способа реализует закон отклонения рулевых колес автомобиля по зависимости (23) или (28) по запомненным значениям оценок параметров системы. Регулятор угла сцепки 16 в соответствии со вторым вариантом предлагаемого способа реализует закон отклонения рулевых колес автомобиля по зависимости (33) по текущим значениям оценок параметров системы, доставляемых идентификатором.
Сформированный закон отклонения рулевых колес автомобиля автоматически отрабатывается в системе усилителя руля 18, предполагающей свое отключение, если водитель взял управление на себя (как это реализовано в прототипе).
Значение коэффициента усиления закона управления формируемое в модуле 13 ограничено диапазоном (25) по первому предлагаемому способу и (34) по второму предлагаемому способу. Исходное положение соответствует равенству единице. При этом по первому варианту предлагаемого способа объект «автомобиль-прицеп» в замкнутой системе управления при движении назад имеет такую же динамику, как и при движении вперед. Этот режим целесообразно использовать при отсутствии внешних возмущений, когда при работе закона управления угол сцепки достигает требуемого значения. В противном случае при влиянии внешнего возмущения (значительный уклон дорожного полотна, наличие существенных неровностей дороги, неодинаковость давления в шинах прицепа, переменную плотность почвы и разные условия сцепления колес, возникающих, например, на пашне, на почве с высокой влажностью, заснеженной поверхности, на песке и др.) этот коэффициент предлагается увеличивать, что даст увеличение скорости переходного процесса и точности управления. Единичное значение коэффициента усиления закона управления по второму варианту предлагаемого способа соответствует переходному процессу в замкнутой системе управления по предустановленному параметру ам эталона (32).
Человеко-машинный интерфейс 17 используется для управления всей системой: ее включение и выключение, запуск предварительной идентификации на маневре по первому варианту предлагаемого способа и получение сигнала о ее завершении, отображение заданного и текущего угла сцепки, переключение режимов работы системы (если в ней реализованы оба варианта предлагаемого способа) и пр.
На фиг. 3, 4 представлены результаты моделирования процесса управления объектом «автомобиль-прицеп» при движении назад с адаптивным управлением по зависимостям (19), (29), (30), (33); t - текущее время. Принято в качестве параметров системы: а=с=2 м, b=0.5 м; скорость автомобиля: Vавт=-1 м/с; сигналы θ и ϕ измеряются с шумами, представляющими собой гауссовский случайный процесс с нулевым средним и среднеквадратическим отклонением 0.1 град. Функция низкочастотной фильтрации ƒ(⋅) по (19) представляет собой апериодическое звено с единичным коэффициентом усиления и постоянной времени 1с; функция ƒ'(⋅) - отличается от предыдущей дополнительной операцией дифференцирования. Эталонная модель: kЗУaм=0.5с-1. Временной шаг дискретности 0.1с. Параметры алгоритма идентификации: γ=10, β=0.9995, начальные значения оценок близки к нулю. Перед подачей закона управления (33) на отработку, он фильтровался на апериодическом звене с единичным коэффициентом усиления и постоянной времени 0.3 с.
Результаты показывают высокую эффективность адаптивного управления: даже при действии существенного внешнего неконтролируемого возмущения , и шумов измерений: система остается устойчивой по углу сцепки и достаточно точно отслеживает его заданное значение. При этом текущие значения оценок, доставляемые алгоритмом идентификации далеки от точных своих значений. Следует отметить, что при меньшем уровне внешнего возмущения и помех измерения, меньшем шаге временной дискретизации качество управления выше представленного.
Защитное устройство двигателя от попадания посторонних предметов
Конвейерный способ сушки полимерной изоляции пальцев кронштейнов щеткодержателей электрических машин инфракрасным излучением
Способ оценки изгибных напряжений в элементах конструкций
Использование поли(3-оксапентилендисульфида) для извлечения тяжелых металлов из водных растворов
Система контроля сопротивления балласта и целостности рельс железнодорожной линии с применением сигналов с линейной частотной модуляцией
Способ измерения температуры грунта
Устройство для сканирования контролируемых объектов
Капиллярно-сталагмометрический способ получения супрамолекулярных систем
Колесная пара с изменяемой фрикционно-упругой связью между колесами
Информационная система заблаговременного оповещения о закрытии (свободности) железнодорожного переезда
Способ создания адаптивного торможения поршня в пневмоцилиндре
Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом
Одноколейный двухколесный автоматизированный скутер и способ его использования
Способ адаптивного управления автоматической подачей песка под колеса локомотива
Адаптивная система помощи водителю легкового автомобиля с прицепом при движении задним ходом и способ её использования

