Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления (САУ) углом крена летательного аппарата (ЛА).
Известны САУ, обеспечивающие отработку заданного угла крена ЛА с помощью автопилота, воздействующего на угол отклонения элеронов ЛА [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 116, рис. 3.22], [Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 560 с. Стр. 184, рис. 5.5], [Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с. 240. Стр. 212, рис. 15.2].
Эти САУ за счет астатизма системы обеспечивают хорошую точность поддержания заданного значения угла крена. Однако они не позволяют ограничить максимальное значение угловой скорости крена ЛА.
Как известно, интенсивное вращение по крену (ωx≠0) приводит за счет аэроинерционного взаимодействия продольного и бокового движения к уменьшению степени устойчивости самолета на малых и умеренных углах атаки. При достаточно больших, так называемых критических угловых скоростях крена ωх кр, устойчивость теряется и развивается движение с резким изменением углов атаки и скольжения, большой амплитудой перегрузки, действующей на самолет, и нарастанием самой угловой скорости ωх. Эта форма движения называется аэроинерционным вращением и характерна для скоростных самолетов. Для предотвращения выхода на аэроинерционное самовращение в полете ограничивают допустимые угловые скорости ωх д. [Аэромеханика самолета: Динамика полета / Под ред. А.Ф. Бочкарева и В. В. Андриевского. - М.: Машиностроение, 1985. - 360 с. Стр. 343-344.].
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата, содержащая последовательно соединенные задатчик угла крена и вычислитель автопилота угла крена, сервопривод, выходной сигнал которого определяет угол отклонения элеронов летательного аппарата, датчик угла крена летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла крена, датчик угловой скорости крена летательного аппарата, имеющий выход, подключенный к третьему входу вычислителя автопилота угла крена. Кроме того, система содержит последовательно соединенные задатчик максимальной угловой скорости крена, вычислитель автомата ограничения угловой скорости крена и алгебраический селектор максимального сигнала, выход которого подключен к входу сервопривода, а второй вход вычислителя автомата ограничения угловой скорости крена соединен с выходом датчика угловой скорости крена, выход вычислителя автопилота угла крена подключен ко второму входу алгебраического селектора максимального сигнала. [Патент РФ №2430858 на изобретение: МПК 8 В64С 13/18, G05D 1/08. Система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата / В.И. Петунии, Э.Ю. Абдуллина, В.Н. Ефанов. - Заявка №2010107596/11; Заявл. 02.03.2010; Зарегистр. в Государственном реестре изобретений РФ 10.10.2011. Бюл. №28.].
Эта система обеспечивает ограничение угловой скорости крена и плавные переходные процессы в САУ углом крена ЛА за счет включения автомата ограничения фиксированного значения максимальной угловой скорости с помощью алгебраического селектора.
Однако значение максимальной угловой скорости крена на режиме аэроинерционного самовращения ЛА не остается постоянным. Согласно работе [Динамика полета: Учебник для студентов вузов / Ефремов А.В., Захарченко В.Ф., Овчаренко В.Н. и др.; под ред. Г.С. Бюшгенса. - М: Машиностроение, 2011. - 776 с. Стр. 747], существование этого критического режима определяется неблагоприятным сочетанием следующих характеристик:
- знака и величины исходных углов атаки и скольжения;
- высоты и числа М полета;
- степени поперечной статической устойчивости самолета и характера ее зависимости от угла атаки;
- абсолютной величины и степени отличия первой критической скорости крена от второй (зависящих от частных особенностей аэродинамической и весовой компоновок самолета);
- положения органов управления в исходном режиме полета;
- значения скорости крена, которая может быть создана полным отклонением элеронов.
Следовательно, необходимо вычислять максимально допустимое значение угловой скорости угла крена ЛА в зависимости от условий полета. В зависимости от этого вычисленного значения можно допускать большую или меньшую скорость вращения, что обеспечит наилучшее использование динамических характеристик ЛА на различных режимах и условиях полета. При этом будет обеспечена безопасность выполнения вращения, поскольку максимально допустимые значения скорости вращения будут известны и САУ не допустит опасного к ним приближения.
Таким образом, задачей, на решение которой направлено заявляемое изобретение, является наилучшее использование динамических характеристик ЛА на различных режимах и условиях полета при обеспечении высокой надежности управления углом крена.
Технический результат - обеспечение максимально допустимой для данных условий полета угловой скорости крена ЛА за счет включения вычислителя максимальной угловой скорости крена и датчиков выходных параметров летательного аппарата.
Поставленная задача решается тем, что в систему автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата, содержащую последовательно соединенные задатчик угла крена, вычислитель автопилота угла крена, алгебраический селектор, сервопривод элеронов летательного аппарата и датчик угла крена летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла крена, последовательно соединенные задатчик максимальной угловой скорости крена и вычислитель автомата ограничения угловой скорости крена, выход которого подключен ко второму входу алгебраического селектора, датчик угловой скорости крена летательного аппарата, имеющий выход, подключенный к третьему входу вычислителя автопилота угла крена и второму входу вычислителя автомата ограничения угловой скорости крена, в отличие от прототипа дополнительно введены датчик положения ручки управления летчика, выход которого подключен к входу задатчика угла крена, вычислитель максимальной угловой скорости крена, первый вход которого соединен с выходом датчика положения ручки управления летчика, второй вход - с выходом датчика высоты полета летательного аппарата, третий вход - с выходом датчика числа М летательного аппарата, четвертый вход - с выходом датчика угла атаки летательного аппарата, пятый вход - с выходом датчика угла скольжения летательного аппарата, шестой вход - с выходом датчика угловой скорости крена летательного аппарата, а выход которого подключен к входу задатчика максимальной угловой скорости крена.
Согласно изобретению в систему автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата может быть дополнительно введен датчик положения элеронов летательного аппарата, вход которого соединен с выходом сервопривода элеронов, а выход подключен к седьмому входу вычислителя максимальной угловой скорости крена.
Существо изобретения поясняется чертежами.
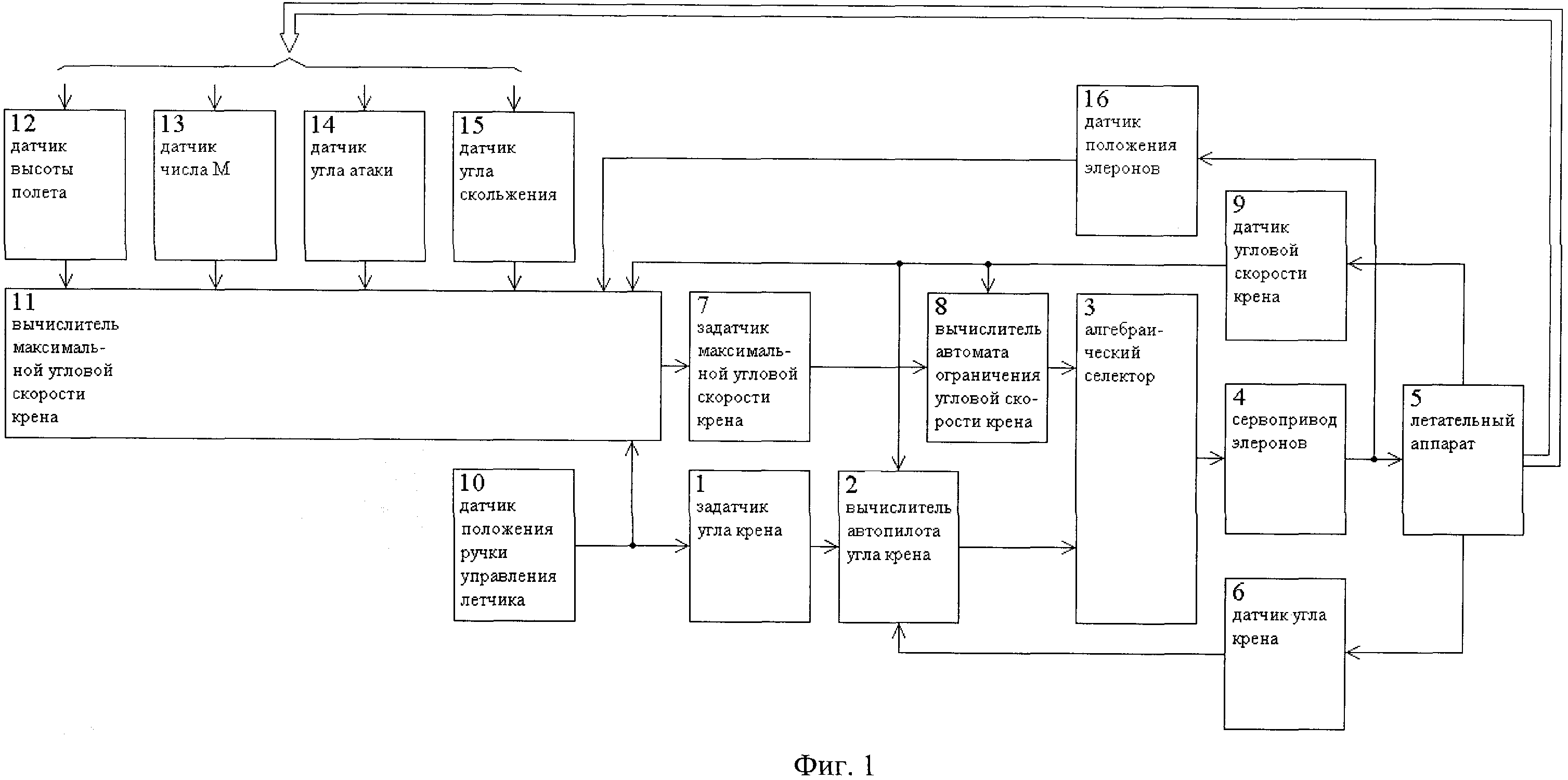
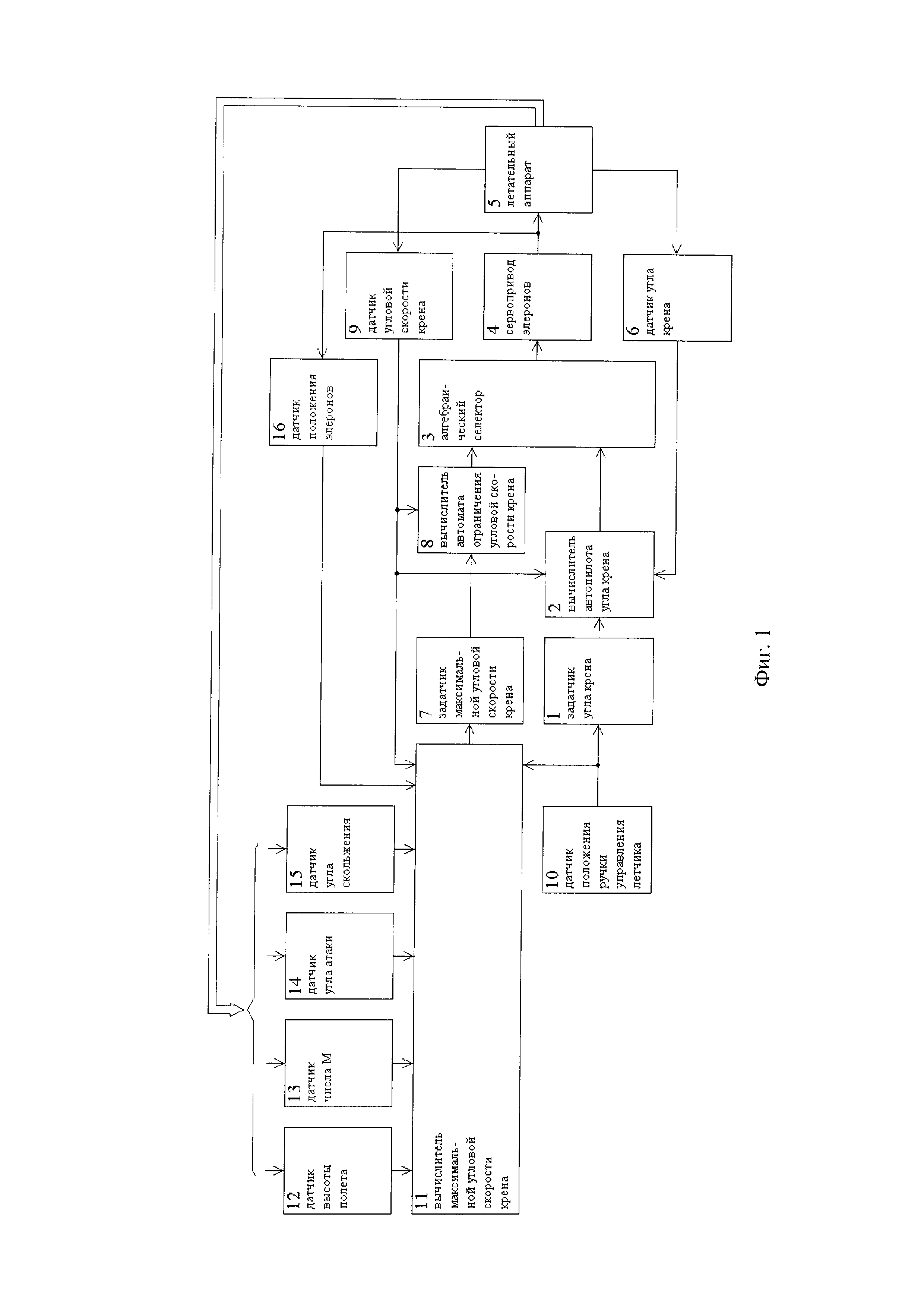
На фиг. 1 представлена структурная схема заявляемой системы автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата.
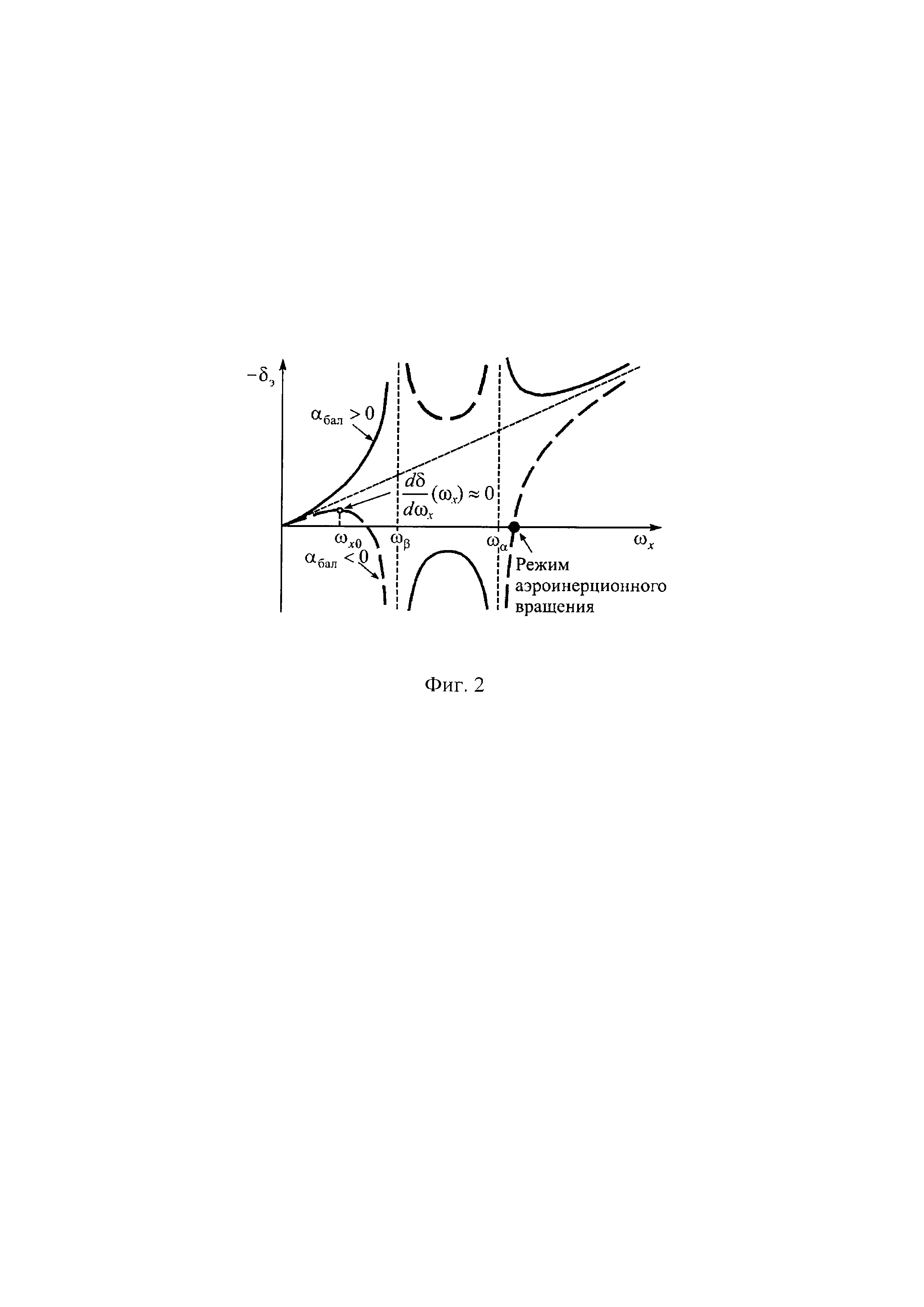
На фиг. 2 представлена зависимость угла отклонения элеронов от установившейся угловой скорости крена:  [Динамика полета: Учебник для студентов вузов / Ефремов А.В., Захарченко В.Ф., Овчаренко В.Н. и др.; под ред. Г.С. Бюшгенса. - М.: Машиностроение, 2011. - 776 с. Стр. 746, рис. 20.9].
[Динамика полета: Учебник для студентов вузов / Ефремов А.В., Захарченко В.Ф., Овчаренко В.Н. и др.; под ред. Г.С. Бюшгенса. - М.: Машиностроение, 2011. - 776 с. Стр. 746, рис. 20.9].
Система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата содержит последовательно соединенные задатчик угла крена 1, вычислитель автопилота угла крена 2, алгебраический селектор 3, сервопривод элеронов 4 летательного аппарата 5 и датчик угла крена 6 летательного аппарата 5, имеющий выход, подключенный ко второму входу вычислителя автопилота угла крена 2, последовательно соединенные задатчик максимальной угловой скорости крена 7 и вычислитель автомата ограничения угловой скорости крена 8, выход которого подключен ко второму входу алгебраического селектора 3, датчик угловой скорости крена 9 летательного аппарата 5, имеющий выход, подключенный к третьему входу вычислителя автопилота угла крена 2 и второму входу вычислителя автомата ограничения угловой скорости крена 8, отличающаяся тем, что дополнительно содержит датчик положения ручки управления летчика 10, выход которого подключен к входу задатчика угла крена 1, вычислитель максимальной угловой скорости крена 11, первый вход которого соединен с выходом датчика положения ручки управления летчика 10, второй вход - с выходом датчика высоты полета 12 летательного аппарата 5, третий вход - с выходом датчика числа М 13 летательного аппарата 5, четвертый вход - с выходом датчика угла атаки 14 летательного аппарата 5, пятый вход - с выходом датчика угла скольжения 15 летательного аппарата 5, шестой вход - с выходом датчика угловой скорости крена 9 летательного аппарата 5, а выход которого подключен к входу задатчика максимальной угловой скорости крена 7.
Система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата дополнительно содержит датчик положения элеронов 16 летательного аппарата 5, вход которого соединен с выходом сервопривода элеронов 4, а выход подключен к седьмому входу вычислителя максимальной угловой скорости крена 11.
Обеспечение наилучшего использования динамических характеристик ЛА на различных режимах и условиях полета при обеспечении безопасности управления углом крена достигается за счет введения в структуру САУ вычислителя максимальной угловой скорости крена и датчиков выходных параметров летательного аппарата.
Система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата работает следующим образом.
Летчик управляет углом крена ЛА путем отклонения ручки управления на угол αру, который измеряется с помощью датчика положения ручки управления летчика 10.
Сигнал заданного угла крена γзад=γзад(αру) с выхода задатчика угла крена 1 поступает на первый вход вычислителя автопилота угла крена 2, на второй вход которого поступает сигнал текущего значения угла крена γ с выхода датчика угла крена 6, а на третий вход - сигнал текущего значения угловой скорости крена ωx=рγ с выхода датчика угловой скорости крена 9. Здесь p=d/dt. На выходе вычислителя автопилота угла крена 2 формируется сигнал

поступающий на один из входов алгебраического селектора 3.
Сигнал заданной максимальной допустимой угловой скорости крена ωxmax с выхода задатчика максимальной угловой скорости крена 7 поступает на первый вход вычислителя автомата ограничения угловой скорости крена 8, на второй вход которого поступает сигнал текущего значения угловой скорости крена ωx с выхода датчика угловой скорости крена 9. На выходе вычислителя автомата ограничения угловой скорости крена 8 формируется сигнал

поступающий на другой из двух входов алгебраического селектора 3.
Для построения САУ с ограничением параметров ЛА используются логические устройства, реализующие алгоритмы логического выбора каналов. Такой выбор реализуется с помощью алгебраических селекторов [Петунии В.И. Синтез систем автоматического управления летательными аппаратами с автоматами ограничений предельных параметров // Изв. вузов. Приборостроение. 2010. Том 53. №10. - С. 18-24.]. Селекторы вводятся в САУ для плавного переключения каналов управления и обеспечивают во всех условиях работы управляющее воздействие только одного из нескольких каналов управления, включаемых в работу в зависимости от режима работы объекта управления. При этом каждый из каналов управления работает автономно, и его параметры обычно выбираются без учета взаимодействия с другими каналами. Это позволяет сохранить статическую точность и запасы устойчивости, свойственные отдельным каналам управления.
Следовательно, алгебраический селектор обеспечивает плавное переключение с одного канала на другой, например, с автопилота на автомат ограничения и обратно на автопилот.
В рассматриваемой системе используется селектор минимальных сигналов управления. Выходной сигнал алгебраического селектора 3
U=min(U1,U2)
поступает на вход астатического сервопривода элеронов 4 с передаточной функцией

изменяющего угол отклонения элеронов δэ летательного аппарата 5
δэ=Wсп(p)U,
и обеспечивающего поддержание соответствующего режима полета летательного аппарата 5 по углу крена и угловой скорости крена.
Для системы по п. 1.
Режимом инерционного вращения или аэроинерционного самовращения называют самопроизвольное движение самолета относительно трех осей с большой угловой скоростью и значительными угловыми ускорениями, сопровождающееся быстрым возрастанием положительных или отрицательных углов атаки и скольжения, а также нормальной и поперечной перегрузок. Этот критический режим может развиться при превышении более чем на (10…15) % максимально допустимой в эксплуатации скорости крена [Динамика полета: Учебник для студентов вузов / Ефремов А.В., Захарченко В.Ф., Овчаренко В.Н. и др.; под ред. Г.С. Бюшгенса. - М.: Машиностроение, 2011. - 776 с. Стр. 746, рис. 20.9].
Физической причиной возникновения этого режима являются аэродинамическое и инерционное взаимодействия продольного и бокового движений при вращении ЛА по крену.
Анализ динамики полета показывает, что в общем случае у самолета существуют две критические угловые скорости крена (фиг. 2)

где α - угол атаки; β - угол скольжения;  и
и - аэродинамические моменты, определяющие продольную и путевую устойчивости самолета; mz и my - коэффициенты аэродинамических моментов; q=pV2/2 - скоростной напор; ρ=ρ(Н) - плотность воздуха; Н - высота полета; V=Ма - скорость полета; М - число Маха; а - скорость звука; S - площадь крыла; bА и
- аэродинамические моменты, определяющие продольную и путевую устойчивости самолета; mz и my - коэффициенты аэродинамических моментов; q=pV2/2 - скоростной напор; ρ=ρ(Н) - плотность воздуха; Н - высота полета; V=Ма - скорость полета; М - число Маха; а - скорость звука; S - площадь крыла; bА и - средняя аэродинамическая хорда и размах крыла; Ii - моменты инерции самолета.
- средняя аэродинамическая хорда и размах крыла; Ii - моменты инерции самолета.
При этих угловых скоростях периоды вращения самолета относительно продольной оси совпадают с периодами свободных недемпфированных колебаний относительно нормальной или поперечной осей (фиг. 2). По мере приближения угловой скорости вращения по крену к одной из критических скоростей степень проявления взаимодействия продольного и бокового движений будет увеличиваться, что может привести к потере устойчивости движения самолета.
Из приведенных формул следует, что с увеличением степени статической устойчивости самолета, его момента инерции относительно продольной оси и скоростного напора q и уменьшением моментов инерции относительно нормальной и поперечной осей самолета (точнее, разности моментов инерции Iy-Iх и Iz-Ix), повышаются критические скорости крена ωα, ωβ. С увеличением числа М и высоты полета критические скорости крена уменьшаются, причем одна из них ωβ - особенно сильно вследствие падения путевой устойчивости самолета при М>1 и уменьшения с высотой скоростного напора (при М = const).
На основании вышесказанного в вычислитель максимальной угловой скорости крена 11 вводится информация с датчиков положения ручки управления летчика 10, высоты полета 12, числа М 13, угла атаки 14, угла скольжения 15, угловой скорости крена 9.
В реальном полете опасность неблагоприятного проявления инерционного взаимодействия может существенно возрасти или, наоборот, понизиться в зависимости от того, как будут изменяться аэродинамические моменты самолета при скорости крена, меньшей min(ωα, ωβ), поскольку в процессе своего вращения самолет подвергается воздействию не только инерционных, но и аэродинамических моментов.
Следовательно, максимальное значение угловой скорости можно определить в вычислителе максимальной угловой скорости крена 11 по соотношению
ωx max=kmin(ωα,ωβ),
где k<1 - коэффициент запаса, равный, например k=0,9.
Это значение угловой скорости можно рассматривать как максимальное, которое может быть далее введено в задатчик максимальной угловой скорости крена 7.
Если ωα и ωβ равны нулю, то согласно работе [Динамика полета: Учебник для студентов вузов / Ефремов А.В., Захарченко В.Ф., Овчаренко В.Н. и др.; под ред. Г.С. Бюшгенса. - М.: Машиностроение, 2011. - 776 с. Стр. 729], при этом сохраняется непрерывная связь между отклонением органа поперечного управления и возникающей угловой скоростью крена.
Для системы по п. 2.
На фиг. 2 показан характер изменения потребных для балансировки самолета в режиме установившегося вращения с различной скоростью крена углов отклонения элеронов при положительном и отрицательном исходных углах атаки и нулевом исходном угле скольжения. Видно, что в обоих случаях отсутствует линейная связь между скоростью крена и балансировочным углом отклонения элеронов. Однако при положительных исходных углах атаки и  балансировочная кривая с увеличением скорости крена отклоняется вверх, что затрудняет рост угловой скорости самолета до первой критической скорости min(ωα, ωβ). При отрицательных исходных углах атаки и
балансировочная кривая с увеличением скорости крена отклоняется вверх, что затрудняет рост угловой скорости самолета до первой критической скорости min(ωα, ωβ). При отрицательных исходных углах атаки и  на балансировочной кривой в докритической области скоростей крена при ωx≅ωx0 появляется характерная «ложка»
на балансировочной кривой в докритической области скоростей крена при ωx≅ωx0 появляется характерная «ложка»

и далее с увеличением ωx (ωх>ωх0) нарастает тенденция к самопроизвольной раскрутке и переходу на скорости крена, большие max(ωα, ωβ). Возникающие при этом балансировочные режимы вращения с угловой скоростью крена, превышающей max(ωα, ωβ), при неотклоненных элеронах и называют режимами инерционного вращения.
Следовательно, при наличии датчика положения элеронов 16 в вычислителе максимальной угловой скорости крена 11 можно определить по соотношению

значение угловой скорости, соответствующее точке экстремума
ωx=ωx0.
Это значение угловой скорости можно рассматривать как максимальное, которое может быть далее введено в задатчик максимальной угловой скорости крена 7.
ωx max=ωx0.
Этот результат вычисления, очевидно, является более точным, чем для системы по п. 1.
Введение вычисленного значения максимальной угловой скорости крена должно осуществляться дискретно с фиксацией этого значения в зависимости от изменения положения ручки управления летчика и изменения угловой скорости крена. Это необходимо для исключения влияния обратных связей по выходным координатам летательного аппарата на динамические характеристики, обеспечения устойчивости и качества системы автоматического управления углом курса.
Итак, заявляемое изобретение позволяет, благодаря введению в структуру САУ углом крена и ограничения угловой скорости крена ЛА вычислителя максимальной угловой скорости крена и датчиков выходных параметров, реализовать максимально допустимую на различных режимах и в различных условиях полета угловую скорость вращения ЛА при обеспечении безопасности пилотирования.
Способ изготовления комбинированной полой лопатки турбомашины из алюминиевого сплава
Способ диагностики помпажа компрессора газотурбинного двигателя и устройство для его реализации
Способ управления стартер-генератором, интегрированным в газотурбинный двигатель, при коротком замыкании
Электропривод летательного аппарата (варианты)
Форсунка с ультразвуковым излучателем
Способ низкотемпературного ионного азотирования титановых сплавов
Устройство защиты от короткого замыкания высокотемпературного стартер-генератора обращённой конструкции
Гибридный магнитный подшипник с использованием сил лоренца (варианты)
Способ изготовления полой лопатки газотурбинного двигателя
Способ упрочнения и формирования винтового арматурного стержня
Система автоматического управления углом тангажа и ограничения предельных значений параметров летательного аппарата
Способ формирования траектории полета информационного летательного аппарата и устройство для его осуществления
Помехоустойчивый самонастраивающийся измеритель температуры газа газотурбинного двигателя
Измеритель температуры газа газотурбинного двигателя
Система автоматического управления углом курса и ограничения угла крена летательного аппарата
Система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата
Система автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата

