Результат интеллектуальной деятельности: Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к области машиностроения, в частности к манипуляторам для выполнения операций, связанных с изменением положения изделия, заготовки и т.п. в пространстве в радиационно - защитной камере.
Известно устройство ручного управления манипулятором-триподом (см. патент РФ №2501648, кл. МПК B25J 13/02, опубл. 20.12.2013 г.). Устройство содержит корпус, манипуляционную рукоятку и датчики позиционирования. Манипуляционная рукоятка установлена посредством сферического шарнира на платформе, связанной с рукоятью-подлокотником. На стержне манипуляционной рукоятки установлена скользящая втулка, на внешней поверхности которой по окружности через 120° размещены сферические шарниры, в которых крепятся штанги датчиков позиционирования, другие концы которых связаны с платформой посредством цилиндрических шарниров.
Известно устройство ручного управления подвижным объектом (см. патент РФ №2253593, кл. МПК B64С 13/04, опубл. 10.06.2005 г.). Устройство содержит корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки. Механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде двух дуг, консольно установленных на соответствующих осях вращения. Одна дуга отклоняется относительно вертикальной, а другая - относительно горизонтальной осей.
Известна робототехническая система сервисного космического аппарата с силомоментной обратной связью (см. РФ №2620540, кл. МПК B64G 4/00, опубл. 26.05.2017 г.). Робототехническая система содержит семистепенной манипулятор с конечным звеном в виде устройства для фиксации сменного инструмента, магазин сменных инструментов в виде платформы, вращающейся вокруг своей оси, с универсальными устройствами крепления и набор сменных инструментов. Семистепенной манипулятор снабжен датчиками вращающего момента в каждом из его шарниров. Конечное звено манипулятора оснащено датчиком усилий и моментов и разъемом для питания электроинструмента.
К причинам, препятствующим достижению указанного ниже технического результата является то, что известные устройства не обеспечивают сколь угодно продолжительное перемещение робота-манипулятора в пространстве.
Сущность предлагаемого способа управления исполнительным механизмом робота -манипулятора с силомоментной обратной связью заключается в том, что организацию электрического сигнала для перемещении исполнительного механизма робота -манипулятора по трем взаимно перпендикулярным плоскостям осуществляют путем перемещения рукоятки управления по осям Х, Y и Z , а организацию электрического сигнала для вращения исполнительного механизма робота -манипулятора осуществляют путем вращении рукоятки управления вокруг трех осей Х, Y и Z, причем электрический сигнал по любой координате отдельно или по всем координатам одновременно в одном направлении для движения исполнительного механизма робота -манипулятора может быть организован сколь угодно долго путем блокировки рукоятки управления в заданном направлении, причем область движения исполнительного механизма робота -манипулятора от нулевой координаты разделена на рабочую - скорость перемещения от 0 до 0,2 м/мин и ускоренную - скорость перемещения до 1 м/мин.
Кроме того, электрический сигнал силомоментной обратной связи от исполнительного механизма робота -манипулятора направляют на шестикоординатный тензодатчик, который посылает сигнал на каждый из 6-ти приводов, которые в свою очередь переводят привод в физическое движение или вращение в соответствии с заданной частотой, тем самым создавая обратную связь с устройством управления.
Сущность предлагаемого устройства управления исполнительным механизмом робота -манипулятора с силомоментной обратной связью заключается в том, что механические узлы устройства выполнены в виде двух продольных приводов по оси Х, одного перпендикулярного привода по оси У своими концами расположенного на продольных приводах и одного вертикального привода по оси Z своим концом расположенного на перпендикулярном приводе, причем продольные, перпендикулярный и вертикальный приводы оснащены шаговыми электродвигателями, а вертикальный привод посредством рычагов дополнительно соединен с тремя серводвигателями обеспечивающими вращение рукоятки управления вокруг осей Х, Y и Z. Рукоятка управления оснащена кнопкой блокировки сигнала, кнопкой обнуления координат, курком для команды сжатия захвата робота-манипулятора и шестикоординатным тензодатчиком, а датчик силомоментной обратной связи, установленный на захвате робота-манипулятора, соединен через компьютер с шестикоординатным тензодатчиком, установленном на рукоятке управления.
Использование предлагаемого изобретения обеспечивает следующий технический результат - расширение технических возможностей робота-манипулятора за счет продолжительного перемещения захвата робота-манипулятора в пространстве и точности управления роботом-манипулятором.
Указанный технический результат при осуществлении способа заключается в том, что способ управления исполнительным механизмом робота -манипулятора с силомоментной обратной связью, включает организацию электрического сигнала для перемещении исполнительного механизма по трем взаимно перпендикулярным плоскостям, вращение исполнительного механизма вокруг трех осей и организацию электрического сигнала силомоментной обратной связи от исполнительного механизма к рукоятке управления.
Особенность заключается в том, что организацию электрического сигнала для перемещении исполнительного механизма робота -манипулятора по трем взаимно перпендикулярным плоскостям осуществляют путем перемещением рукоятки управления по осям Х, Y и Z, а организацию электрического сигнала для вращения исполнительного механизма робота -манипулятора осуществляют путем вращении рукоятки управления вокруг трех осей Х, Y и Z, причем электрический сигнал по любой координате отдельно или по всем координатам одновременно в одном направлении для движения исполнительного механизма робота -манипулятора может быть организован сколь угодно долго путем блокировки рукоятки управления в заданном направлении, причем область движения исполнительного механизма робота -манипулятора от нулевой координаты разделена на рабочую - скорость перемещения от 0 до 0,2 м/мин и ускоренную - скорость перемещения до 1 м/мин.
Кроме того, электрический сигнал силомоментной обратной связи от исполнительного механизма робота -манипулятора направляют на шестикоординатный тензодатчик, который посылает сигнал на каждый из 6-ти приводов, которые в свою очередь переводят его в физическое движение или вращение в соответствии с заданной частотой, тем самым создавая обратную связь с устройством управления.
Указанный технический результат при осуществлении предлагаемого устройства управления исполнительным механизмом робота -манипулятора с силомоментной обратной связью, включающее рукоятку управления кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное перемещение рукоятки по трем взаимно перпендикулярным направлениям и вращение вокруг трех взаимно перпендикулярных осей.
Особенность заключается в том, что механические узлы устройства выполнены в виде двух продольных приводов по оси Х, одного перпендикулярного привода по оси У своими концами расположенного на продольных приводах и одного вертикального привода по оси Z своим концом расположенного на перпендикулярном приводе, причем продольные, перпендикулярный и вертикальный приводы оснащены шаговыми электродвигателями, а вертикальный привод посредством рычагов дополнительно соединен с тремя серводвигателями обеспечивающими вращение рукоятки управления вокруг осей Х, Y и Z. Рукоятка управления оснащена кнопкой блокировки сигнала, кнопкой обнуления координат, курком для команды сжатия захвата робота-манипулятора и шестикоординатным тензодатчиком, а датчик силомоментной обратной связи, установленный на захвате робота-манипулятора, соединен через компьютер с шестикоординатным тензодатчиком, установленном на рукоятке управления.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует условию «новизна».
Конструкция изобретения представлена на фигурах.
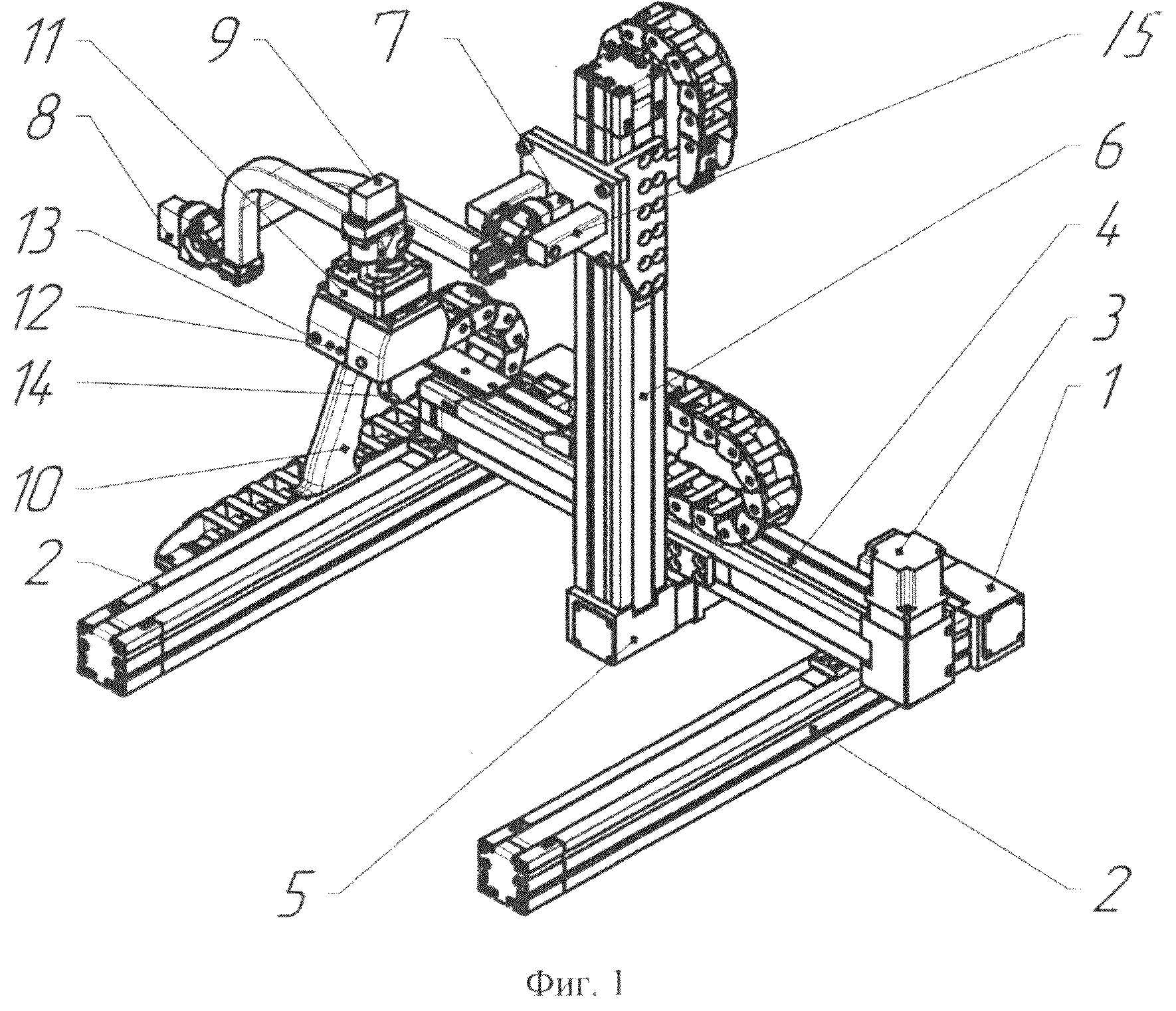
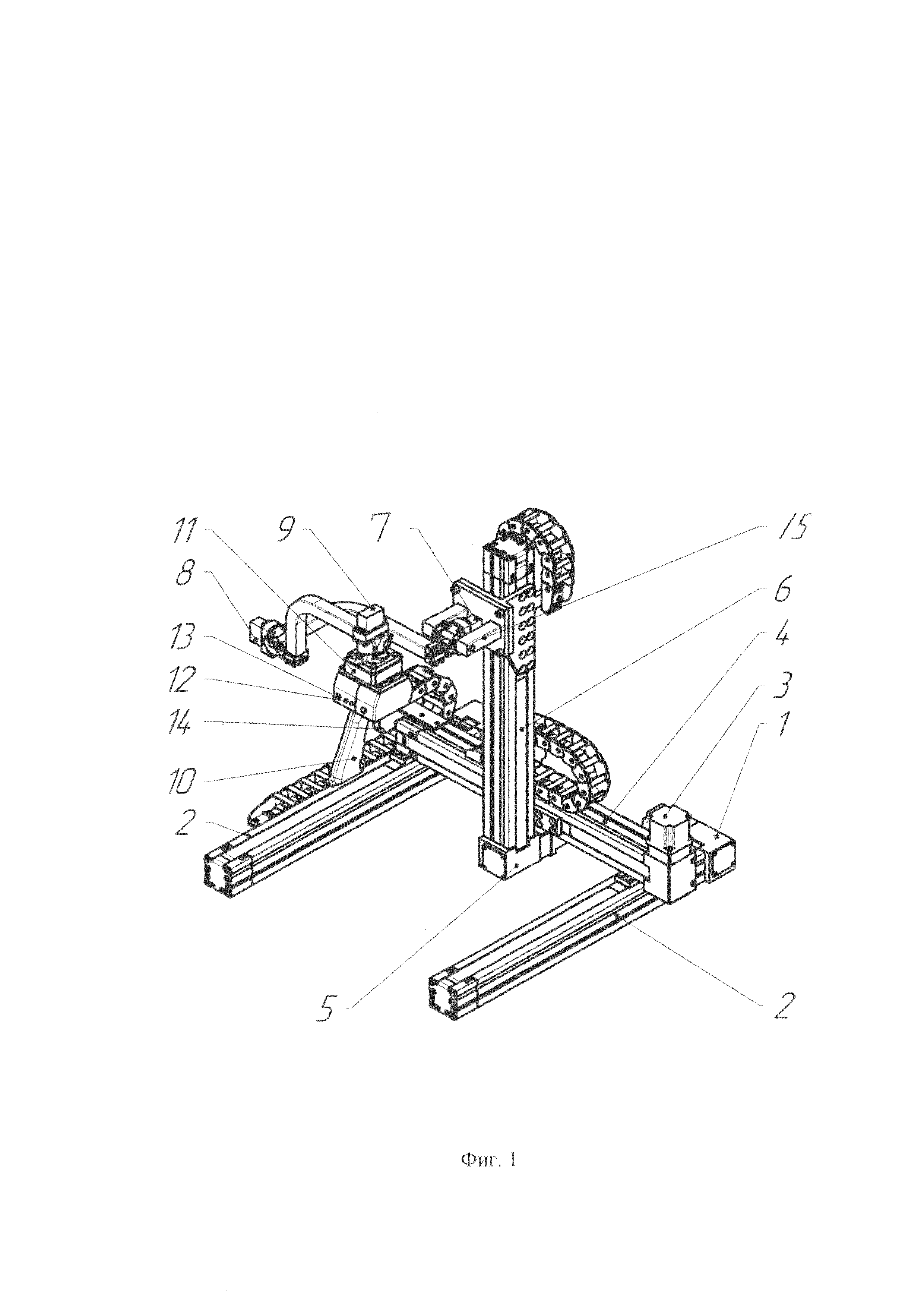
Фиг. 1 - Изометрическое изображение устройства.
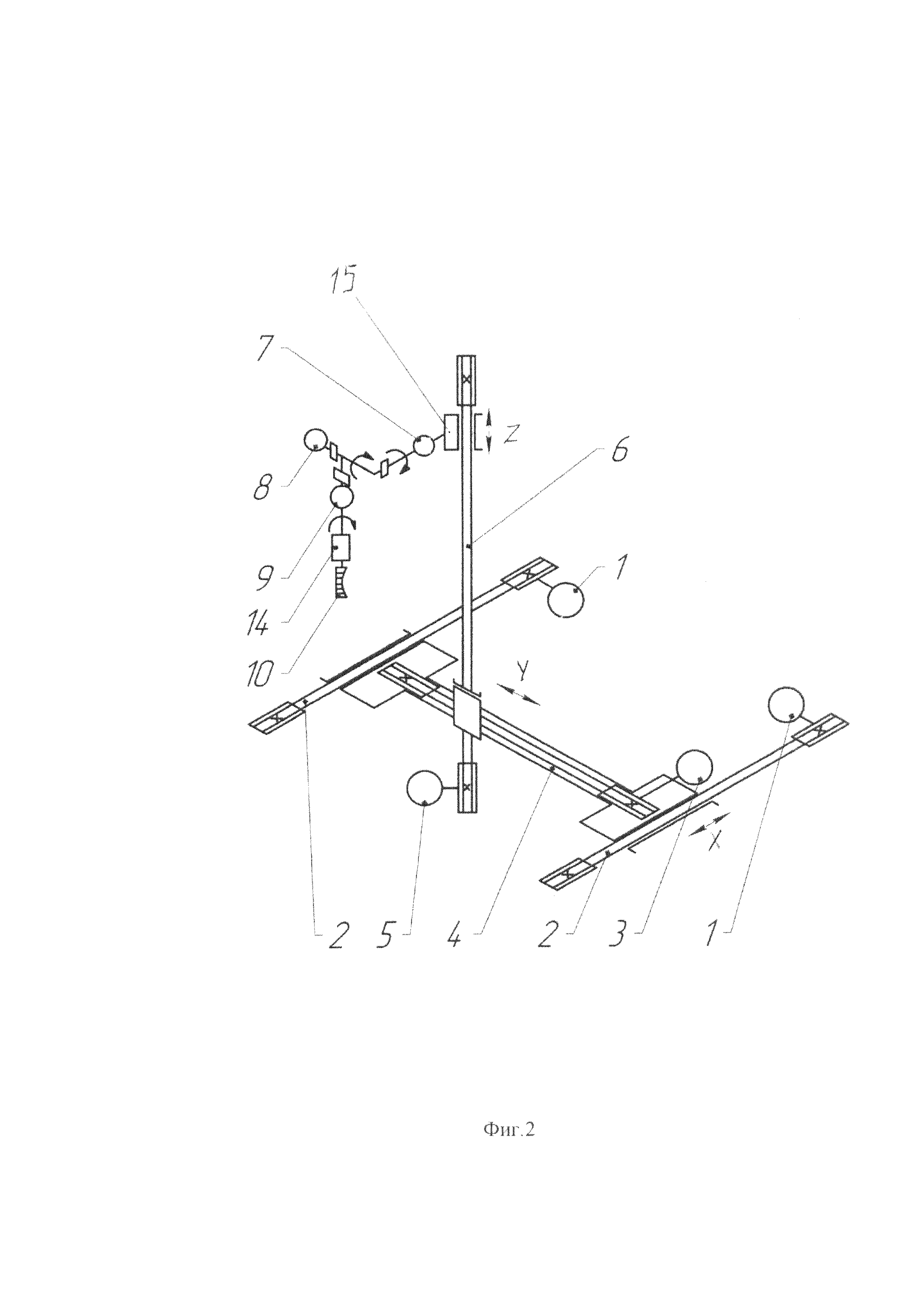
Фиг. 2 - Кинематическая схема устройства.
Фиг. 3 - Схема соединения устройства с исполнительным механизмом.
Устройство состоит из двух шаговых электродвигателей 1, расположенных на приводах 2 и обеспечивающих движение по оси Х, одного шагового электродвигателя 3, расположенного на приводе 4 обеспечивающего движение по оси Y, одного шагового электродвигателя 5, расположенного на приводе 6 обеспечивающего движение по оси Z, серводвигателя 7 с вращением вокруг оси Х, серводвигателя 8 с вращением вокруг оси Y, серводвигателя 9 с вращением вокруг оси Z, рукоятки управления 10, курка 11, кнопки блокировки сигнала 12, кнопки обнуления координат 13, шести координатного тензодатчика 14, кронштейна 15.
Устройство устанавливается на столе в зоне работы оператора 16 и через персональный компьютер (ПК) 17 соединено с роботом-манипулятором 18, который устанавливается в радиационно - защитной камере 19. Захват робота-манипулятора 20 оснащен датчиком 21 силомоментной обратной связи.
Устройство работает следующим образом. Управляющий персонал находиться в зоне работы оператора 16. Непосредственным органом управления является рукоятка управления 10, ПК - 17 вспомогательный инструмент для запуска и контроля робота-манипулятора 18 на подвижной опоре.
Для перемещения робота-манипулятора вперед по оси Х оператор перемещает рукоятку 10 вперед, при этом вся консоль устройства совершает перемещение по двум клиноременным приводам 2 за счет двух шаговых электродвигателей 1, расположенных на соответствующих приводах. Привод получает сигнал соответствующего значения через шести координатный тензодатчик 14.. Ответной реакцией робота -манипулятора 18 на это воздействие будет перемещение захвата 20 по оптимальной траектории в горизонтальном направлении. Если при этом рабочий орган робота-манипулятора 18 не достигает объекта воздействия (например затвор шлюза в камере) вследствие достижения полного вылета руки (достигнут физический предел), то подвижная опора робота -манипулятора 18, на которой расположена рука, совершает перемещение к заданному объекту.
Рабочая скорость передвижения исполнительного механизма робота-манипулятора 18 по трем линейным координатам X,Y и Z соответствует скорости перемещения ручки 10 и изменяется от 0 до 0,2 м/мин. Для ускоренного передвижения исполнительного механизма робота-манипулятора 18 в любом из трех направлений оператор перемещает ручку 10 до упора тем самым обеспечивает скорость передвижения исполнительного механизма робота-манипулятора 18 до 1 м/мин.
Весь процесс отображается на мониторе ПК 17 в режиме реального времени с целью контроля и обеспечения максимальной безопасности при возникновении внештатной ситуации.
Перемещение по осям Y и Z происходит аналогично. Для создания управляющего воздействия на робот -манипулятор 18, оператор перемещает рукоятку 10 по координатам Y и Z. Привод 4 оси Y и привод 6 оси Z совершают при этом линейные перемещения пропорционально своим техническим возможностям. Это возможно благодаря системе управления, которая сначала принимает управляющее воздействие от рукоятки 10, считывает, обрабатывает сигнал, пересчитывает его, проверяет на наличие ошибок (например критический удар в стенку камеры) и переводит на исполнительный элемент робота- манипулятора 18.
Поворот руки робота-манипулятора 18 вокруг оси Х осуществляется за счет поворота рукоятки 10 вокруг оси Х. Точкой опоры является ось, расположенная на кронштейне 15, сам поворот осуществляется серводвигателем 7, который получает воздействие от руки человека на рукоятку 10 через шести координатный тензодатчик 14.
Аналогичны и повороты руки вокруг осей Y и Z. Они осуществляются серводвигателями 8 и 9 соответственно.
Углы поворота и линейные перемещения рукоятки 10 ограничены конструктивно и имеют обратную связь с роботом-манипулятором. На концах приводов 2, 4 и 6 расположены датчики, которые замыкают цепь при достижении движущих элементов крайнего положения. Соответственно, при достижении рукоятки 10 любого крайнего положения, робот-манипулятор 18 с задержкой в несколько миллисекунд останавливает движение по соответствующей координате (или сразу по нескольким координатам).
Обратная связь, организованная датчиком 21 силомоментной обратной связи, необходима для исключения аварийного случая. При достижении захватом 20 робота -манипулятора 18 условно запретной зоны - рукоятка 10 встает неподвижно. В этом случае движение рукоятки 10 невозможно именно в ту сторону, в которую при движении захват будет направлен в запретную зону. Под запретной зоной следует понимать пространство внутри радиационно-защитной камеры 19 движение дальше которой создаст неминуемое столкновение со стенами, полом, потолком и выступающими элементами камеры. Размеры запретной зоны зависят от размеров самой камеры, а величина отступа от критических объектов , как и само ограничение движения робота-манипулятора 18, задается программным обеспечением.
Для закрепления перемещающих предметов в захвате 20 оператор использует курок 11 для подачи команды сжатия захвата.
Таким образом, выше изложенное описание свидетельствует о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство, воплощающее заявленное изобретение, при его осуществлении, предназначено для выполнения операций, связанных с изменением положения изделия, заготовки и т.п. в пространстве в радиационно - защитной камере;
- для заявленного устройства, в том виде как оно охарактеризовано в изложенной формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке средств и методов;
- средство, воплощающее заявленное изобретение при осуществлении, способно обеспечить достижение усматриваемого заявителем поставленных технических задач - расширение технических возможностей робота-манипулятора за счет продолжительного перемещения захвата робота-манипулятора в пространстве и точности управления роботом-манипулятором.
Способ производства трихлорида лютеция-177 и технологическая линия для его реализации
Система мониторинга поглощенных доз ионизирующего излучения
Способ обезболивания и профилактики воспалительных осложнений после торакотомии
Устройство получения электронно-микроскопического изображения и локального элементного анализа радиоактивного образца методом электронной микроскопии в радиационно-защитной камере
Способ профилактики кровотечений и распространения метастазов
Способ прогнозирования исхода распространенного рака яичников после адъювантной химиотерапии по схеме ар
Система улавливания паров при приеме и хранении нефтепродуктов на нефтебазах
Стационарное устройство определения места утечки нефти и нефтепродуктов на участках трубопровода с использованием металлических зондов
Способ прогнозирования развития гипертрофии левого желудочка у больных на гемодиализе
Способ лечения экссудативного плеврита
Регулировочно-соединительное устройство
Универсальная платформа космического аппарата
Регулируемый узел крепления конструкций с интерфейсом на стропах
Способ и устройство сборки источника ионизирующего излучения
Машина испытательная
Регулируемый узел крепления
Способ и устройство контроля герметичности капсул с источником ионизирующего излучения
Способ получения лиофилизированного препарата для иммунологической диагностики беременности и бесплодия коров и телок
Шпаговый манипулятор
Способ загрузки, транспортировки и выгрузки источников ионизирующих излучений и упаковочный комплект для его реализации

