Результат интеллектуальной деятельности: ТРАНСПОРТНОЕ СРЕДСТВО, СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Данное раскрытие относится к транспортному средству, а также к системе и способу управления скоростью транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Современные транспортные средства могут быть оборудованы системой для избежания возможных столкновений с другими транспортными средствами. Система может быть системой избежания столкновений на низких скоростях в сообщении с множеством датчиков транспортного средства, которые могут выдавать сигналы, указывающие скорость и расстояние транспортного средства до объекта, так чтобы можно было нажимать на тормоза для остановки транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В по меньшей мере одном варианте осуществления, предусмотрено транспортное средство, содержащее: силовую передачу; и контроллер, запрограммированный, чтобы, в то время как транспортное средство выполняет маневр постановки на стоянку, и в ответ на скорость транспортного средства, превышающую пороговое значение, уменьшать крутящий момент на выходном валу силовой передачи на основании параметра комфорта торможения, из условия, чтобы скорость становилась меньшей, чем пороговое значение, до завершения маневра постановки на стоянку.
Контроллер может быть дополнительно запрограммирован, чтобы поддерживать уменьшенный крутящий момент на выходном валу по меньшей мере до завершения маневра постановки на стоянку.
Транспортное средство может дополнительно содержать тормозную систему, при этом контроллер дополнительно запрограммирован, чтобы, в ответ на (i) сигнал, указывающий расстояние между транспортным средством и объектом, и (ii) скорость, превышающую другое пороговое значение, продиктованное расстоянием, приводить в действие тормозную систему на основании параметра комфорта торможения, из условия, чтобы скорость становилась меньшей, чем другое пороговое значение.
Параметр комфорта торможения может быть основан на положении силовой передачи, запросе тормозного момента или направлении колес транспортного средства.
Контроллер может быть дополнительно запрограммирован, чтобы, в ответ на сигнал, указывающий расстояние между транспортным средством и препятствием на пути транспортного средства, приводить в действие тормозную систему, из условия, чтобы транспортное средство останавливалось на заданном расстоянии от препятствия.
Параметр комфорта торможения может быть также основан на максимальном тормозном моменте на выходном валу и заданном пороговом значении замедления, связанном с расстоянием между транспортным средством и объектом, и на расстоянии между транспортным средством и препятствием.
Расстояние между транспортным средством и объектом предпочтительно является большим, чем расстояние между транспортным средством и препятствием.
В по меньшей мере одном варианте осуществления, предусмотрена система управления скоростью транспортного средства, содержащая: контроллер, запрограммированный, чтобы, в ответ на расстояние между транспортным средством и объектом, становящееся меньшим, чем первое пороговое значение, и скорость транспортного средства, превышающую целевую скорость, которая основана на угле продольного наклона транспортного средства и указанном расстоянии, уменьшать скорость до целевой скорости.
Снижение скорости предпочтительно включает в себя уменьшение крутящего момента на выходном валу силовой передачи по меньшей мере до тех пор, пока расстояние не превысит первое пороговое значение.
Снижение скорости также может включать в себя введение в действие тормозной системы, чтобы прикладывать тормозной момент, основанный на заданном замедлении, в то время как расстояние является меньшим, чем второе пороговое значение.
Уменьшение крутящего момента на выходном валу силовой передачи предпочтительно включает в себя подачу команды на уменьшение крутящего момента на выходном валу силовой передачи, связанной с текущим положением педали акселератора.
Второе пороговое значение предпочтительно является меньшим, чем первое пороговое значение.
В по меньшей мере одном варианте осуществления, предусмотрен способ управления скоростью транспортного средства, состоящий в том, что: в ответ на расстояние между транспортным средством и объектом, становящееся меньшим, чем первое пороговое значение, и на скорость транспортного средства, превышающую первую заданную скорость, продиктованную первым пороговым значением, уменьшают крутящий момент на выходном валу силовой передачи согласно углу продольного наклона транспортного средства, чтобы снижать скорость транспортного средства до первой заданной скорости.
Крутящий момент на выходном валу силовой передачи предпочтительно уменьшают по меньшей мере до тех пор, пока расстояние не становится большим, чем первое пороговое значение.
Способ дополнительно состоит в том, что, в ответ на расстояние, становящееся меньшим, чем второе пороговое значение, и на скорость транспортного средства, превышающую вторую заданную скорость, продиктованную вторым пороговым значением, приводят в действие тормозную систему, чтобы снижать скорость транспортного средства согласно заданному замедлению.
Способ может дополнительно состоять в том, что, в ответ на скорость транспортного средства, превышающую заданную скорость, связанную с маневром постановки на стоянку, в то время как транспортное средство выполняет маневр постановки на стоянку, уменьшают крутящий момент на выходном валу силовой передачи на основании скорости транспортного средства и заданного порогового значения замедления, из условия, чтобы замедление транспортного средства было меньшим, чем заданное пороговое значение замедления.
Способ может, дополнительно состоять в том, что, в ответ на расстояние между транспортным средством и препятствием, ближайшим к транспортному средству, становящееся меньшим, чем третье пороговое значение, в то время как транспортное средство выполняет маневр постановки на стоянку, приводят в действие тормозную систему на основании параметра комфорта торможения, чтобы останавливать транспортное средство на заданном расстоянии от препятствия.
Параметр комфорта торможения предпочтительно основан на скорости транспортного средства и направлении колес транспортного средства.
Крутящий момент на выходном валу силовой передачи предпочтительно уменьшают по меньшей мере до завершения маневра постановки на стоянку.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
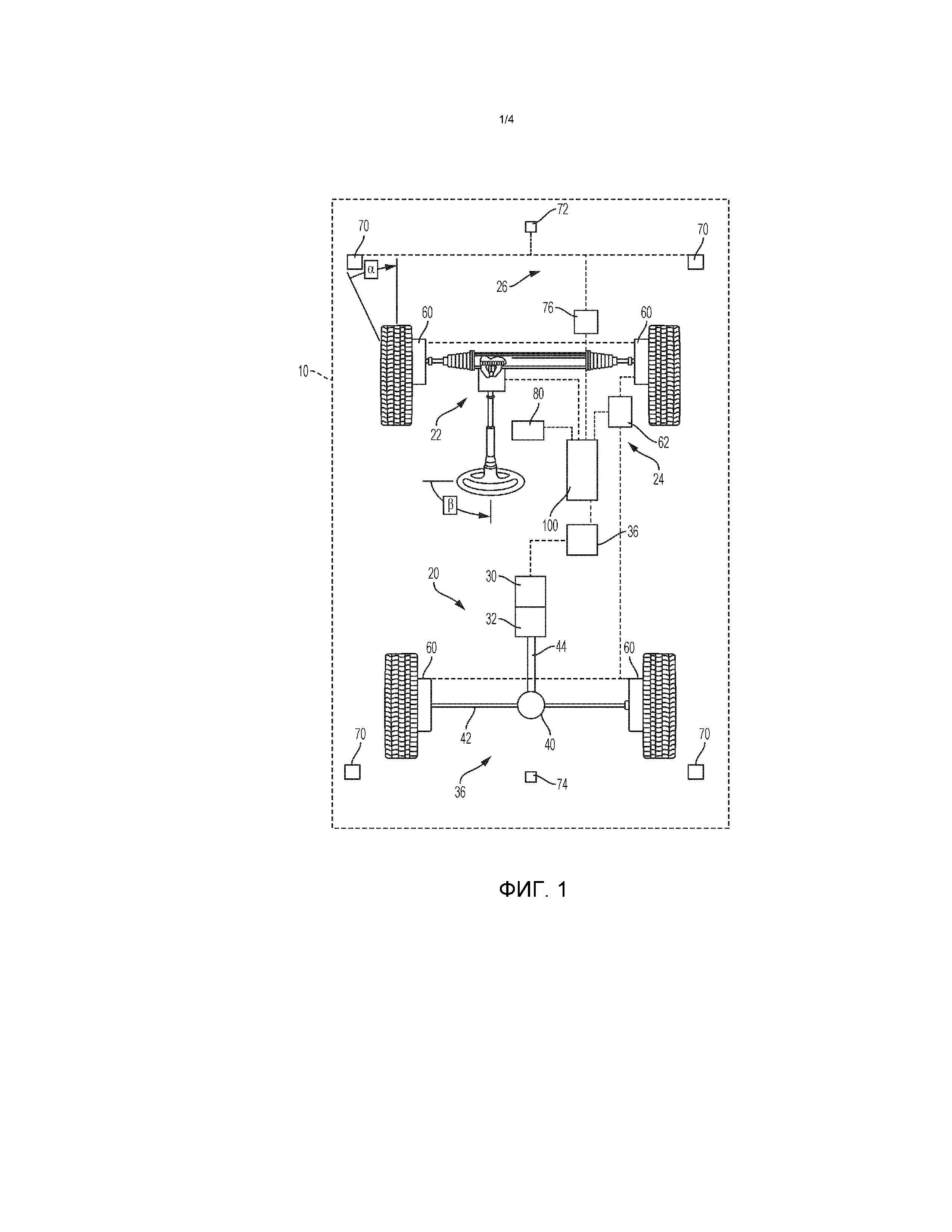
Фиг. 1 - примерный вариант транспортного средства, имеющего систему содействия остановке и управления скоростью.
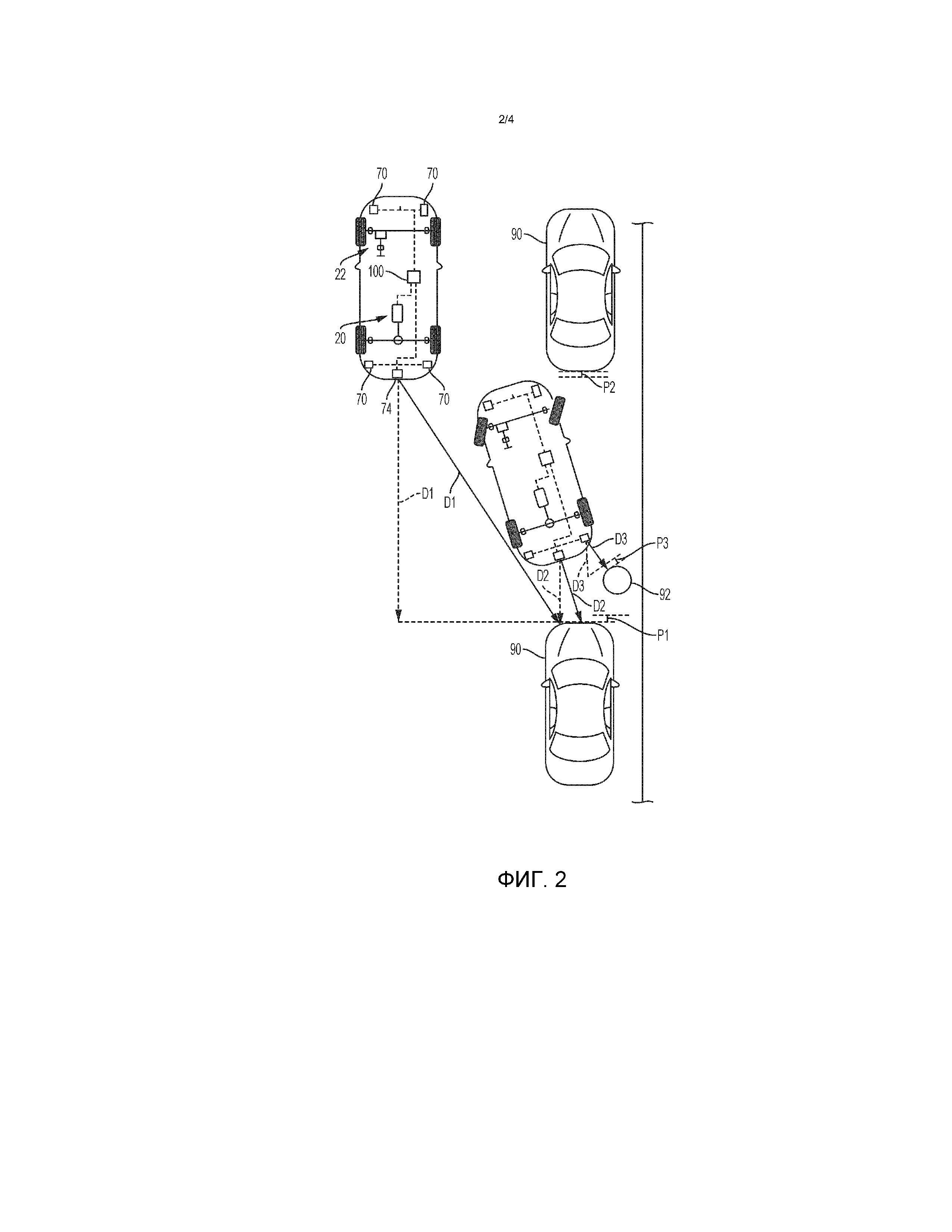
Фиг. 2 - вид в перспективе транспортного средства, выполняющего маневр постановки на стоянку ближе к месту постановки на стоянку.
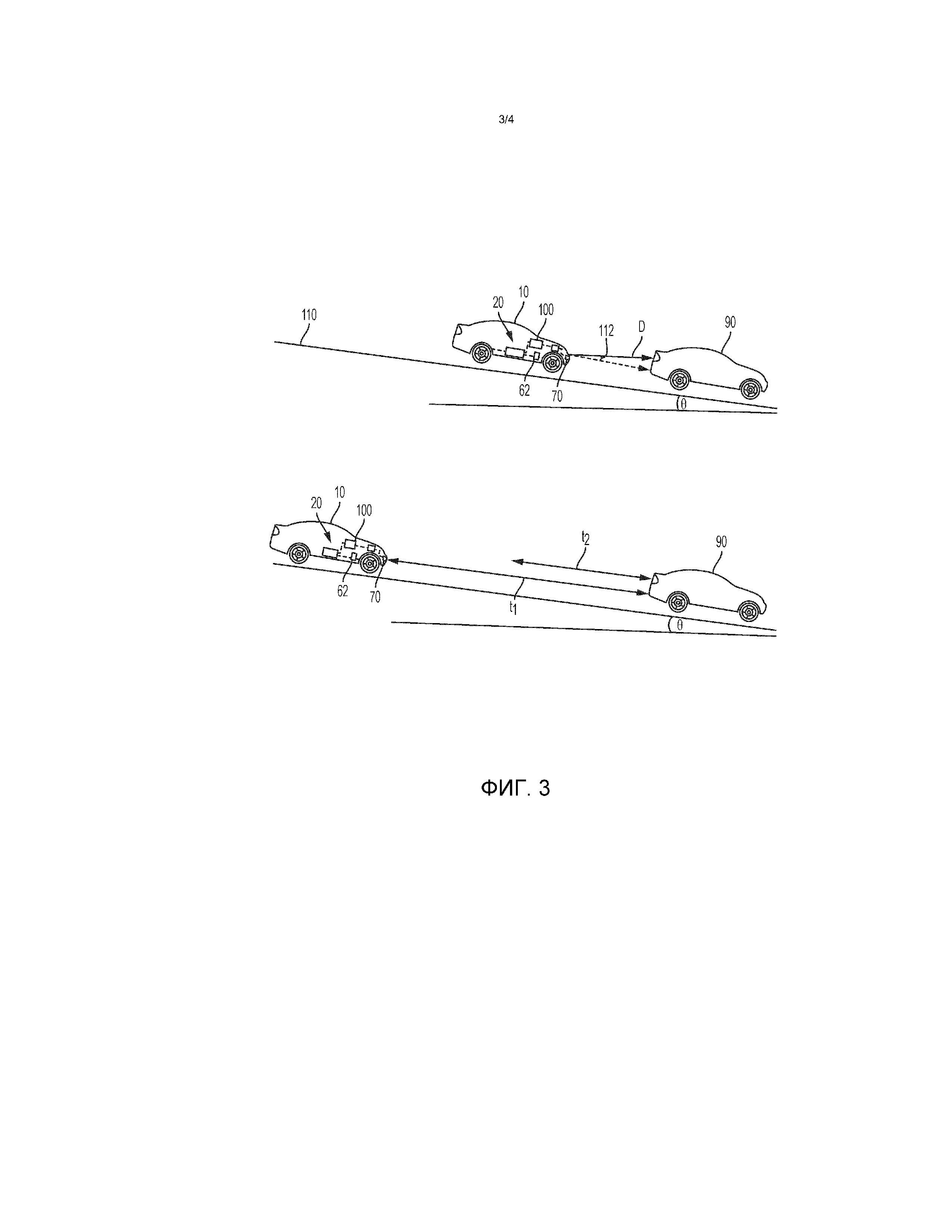
Фиг. 3 - вид в перспективе транспортного средства на наклонной поверхности, приближающегося к другому транспортному средству.
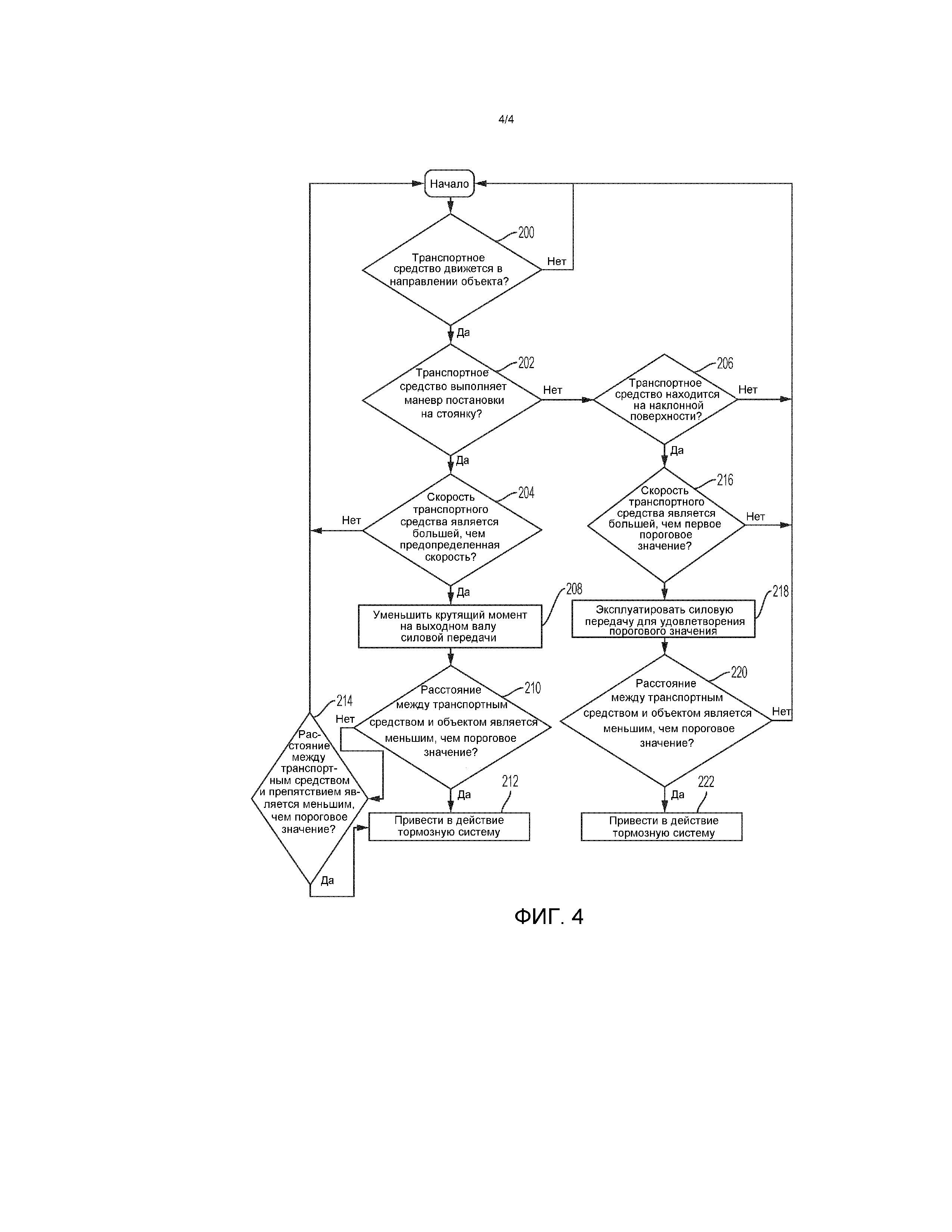
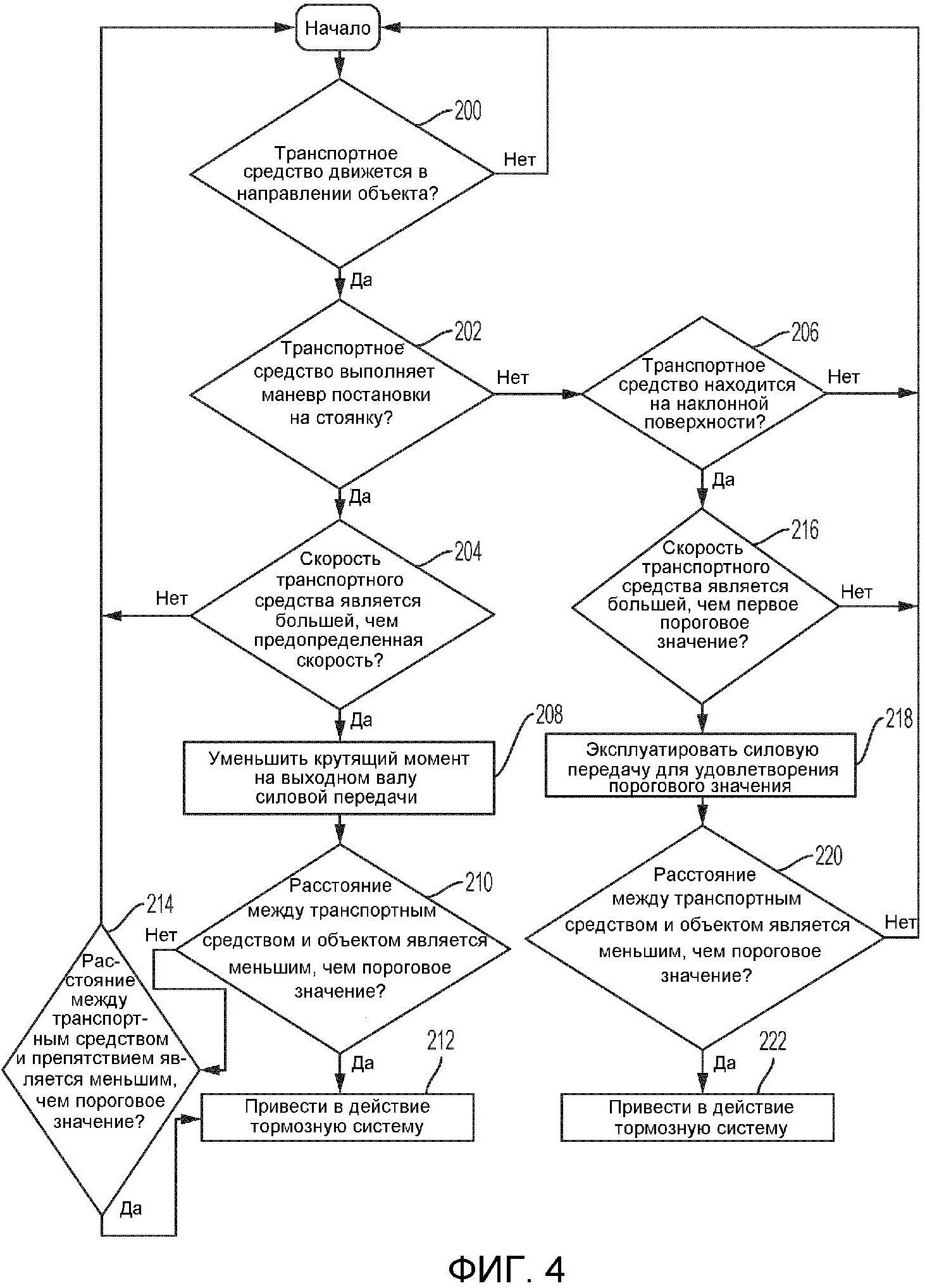
Фиг. 4 - примерный способ управления скоростью транспортного средства.
ПОДРОБНОЕ ОПИСАНИЕ
Согласно требованиям, в материалах настоящей заявки раскрыты детализированные варианты осуществления настоящего изобретения; однако должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно должны определять масштаб; некоторые элементы могут быть увеличены или минимизированы, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
Со ссылкой на фиг. 1, может быть предусмотрено транспортное средство 10. Транспортное средство 10 может быть моторным транспортным средством, таким как автомобиль, грузовой автомобиль, сельскохозяйственное оборудование или военное транспортное средство. Транспортное средство 10 может включать в себя силовую передачу 20, систему 22 рулевого управления, тормозную систему 24 и систему 26 парковки.
Силовая передача 20 может выдавать крутящий момент на одно или более колесных узлов, чтобы приводить в движение транспортное средство 10. Силовая передача 20 может включать в себя двигатель 30, трансмиссию 32, контроллер 34 силовой передачи и по меньшей мере один узел 36 ведущего моста.
Двигатель 30 может быть сконфигурирован в качестве двигателя внутреннего сгорания, который может быть приспособлен действовать с использованием любого пригодного типа топлива, такого как бензин, дизельное топливо, этиловый спирт, водород, и т. д. Двигатель 30 может выдавать мощность или движущий крутящий момент, который может использоваться для вращения одного или более колесных узлов для приведения в движение транспортного средства 10.
Трансмиссия 32 может быть с возможностью приведения в движение присоединена к двигателю 30 и к узлу 36 ведущего моста. Трансмиссия 32 может быть иметь любой пригодный тип, такой как автоматическая или ручная трансмиссия с многочисленными передачами или ступенчатым передаточным отношением. В качестве используемого в материалах настоящей заявки, термин трансмиссия также может включать в себя раздаточную коробку или дифференциал 40.
Контроллер 34 силовой передачи может быть выполнен с возможностью планировать события переключения трансмиссии, выводить положение передачи трансмиссии, менять крутящий момент на выходном валу силовой передачи или распределять мощность между компонентами силовой передачи, если транспортное средство 10 оборудовано таким образом. Контроллер 34 силовой передачи может управлять различными фрикционными элементами или исполнительными механизмами трансмиссии 32, такими как муфты и/или тормоза, чтобы избирательно передавать мощность с двигателя 30 на колеса транспортного средства согласно различным передаточным отношениями трансмиссии.
Узел 36 ведущего моста может с возможностью вращения поддерживать колесный узел с помощью ведущего вала 42. Выходной вал 44 может быть присоединен к входу дифференциала 40.
Система 22 рулевого управления может быть выполнена с возможностью менять направление колес колесного узла 50. Система 22 рулевого управления может включать в себя рулевое колесо 52 в поворотном соединении с колесным узлом 50 через рулевой привод 54. Рулевой привод 54 может быть присоединен к рулевому механизму 56. Рулевой механизм 56 может быть присоединен к колесам колесного узла 50.
Рулевой механизм 56 может быть выполнен с возможностью шарнирно поворачивать или поворачивать колеса колесного узла 50 вокруг оси шкворня в ответ на вращение рулевого колеса 52. Направление колес у колес колесного узла 50 может быть показано в качестве углового положения α колес, а соответствующее поворотное положение рулевого колеса 52 может быть показано в качестве углового положения β рулевого колеса. Датчик угла поворота управляемых колес может быть выполнен с возможностью выдавать сигнал, указывающий угловое положение α колес и/или угловое положение β рулевого колеса.
Электродвигатель 58 рулевого управления с усилителем может быть соединен с рулевым приводом 54 и/или рулевым механизмом 56. Электродвигатель 58 рулевого управления с усилителем может быть выполнен с возможностью сообщать движение или прикладывать крутящий момент к рулевому механизму 56, чтобы изменять направление колес у колес колесного узла 50.
Тормозная система 24 может включать в себя тормозной узел 60 на связи с модулем 62 ABS. Тормозной узел 60 может быть сконфигурирован в качестве фрикционного тормоза, который может замедлять или подавлять вращение по меньшей мере одного колеса, связанного с транспортным средством 10. Тормозной узел 60 может быть сконфигурирован в качестве тормозного барабана или дискового тормоза.
Модуль 62 ABS может быть выполнен с возможностью выдавать запрос тормозного момента в тормозной узел 60. Запрос тормозного момента может управлять величиной или силой нажатия тормозов, выдаваемого тормозным узлом 60, в ответ на нажатие тормозной педали транспортного средства и параметр комфорта торможения. В по меньшей мере одном варианте осуществления, модуль 62 ABS может быть выполнен с возможностью контролировать скорость транспортного средства 10 на основании скорости вращения колес и направления колес.
Со ссылкой на фиг. 2, показан вид в перспективе транспортного средства 10, выполняющего примерный маневр постановки на стоянку ближе к месту постановки на стоянку. Система 26 парковки может содействовать водителю транспортного средства 10 в выполнении маневров постановки на стоянку и, без вмешательства водителя, может направлять транспортное средство 10 на идентифицированное место постановки на стоянку. Система 26 парковки может быть выполнена с возможностью направлять транспортное средство 10 на идентифицированное место постановки на стоянку и останавливать транспортное средство в пределах заданного расстояния от объекта сзади транспортного средства 10, P1, или спереди транспортного средства 10, P2.
Маневр постановки на стоянку может рассчитываться или определяться системой 26 парковки согласно известным технологиям. Примеры таких технологий расчета траектории управления показаны в патентной публикации US № 20110260887 A1, Toledo et al., и в патенте US № 8169341 B2, Toledo et al., которые настоящим включены посредством ссылки во всей своей полноте.
Система 26 парковки может быть выполнена с возможностью эксплуатировать силовую передачу 20, систему 22 рулевого управления и тормозную систему 24, чтобы выполнять и завершать маневр постановки на стоянку. Система 26 парковки может включать в себя множество датчиков 70 парковки, датчик 72 выявления переднего объекта и датчик 74 выявления заднего объекта, все на связи с модулем 76 парковки.
Множество датчиков 70 парковки могут располагаться ближе к углам транспортного средства 10. Множество датчиков 70 парковки могут быть выполнены с возможностью обеспечивать полное или почти полное покрытие датчиками вокруг транспортного средства 10. Количество, тип и/или расположение множества датчиков 70 парковки могут варьироваться на основании применения транспортного средства. Множество датчиков 70 парковки могут включать в себя датчик парковки, датчик присутствия или близости и/или датчик бокового обзора.
Множество датчиков 70 парковки могут быть сконфигурированы в качестве ультразвуковых датчиков, включающих в себя передатчик и приемник. В по меньшей мере одном варианте осуществления, множество датчиков 70 парковки могут быть сконфигурированы в качестве радиолокатора, лазерного локатора, оптического датчика, или тому подобного. Датчик 72 выявления переднего объекта может быть камерой переднего обзора, выполненной с возможностью выдавать информацию в отношении препятствий или объектов спереди транспортного средства 10. Информация может выдаваться водителю транспортного средства через человеко-машинный интерфейс 80. Датчик 72 выявления переднего объекта может быть расположен ближе к передней части транспортного средства 10.
Датчик 74 выявления заднего объекта может быть камерой заднего обзора, выполненной с возможностью выдавать информацию в отношении препятствий или объектов сзади транспортного средства 10. Информация может выдаваться водителю транспортного средства через человеко-машинный интерфейс 80. Датчик 74 выявления заднего объекта может быть расположен ближе к задней части транспортного средства 10.
Множество датчиков 70 парковки могут быть выполнены с возможностью выдавать сигнал, указывающий расстояние между транспортным средством 10 и объектом 90, ближайшим к транспортному средству 10. Объект 90 может быть другим транспортным средством. Множество датчиков 70 парковки могут быть выполнены с возможностью выдавать сигнал, указывающий расстояние между транспортным средством 10 и препятствием 92, которое может попадаться на пути транспортного средства 10, в то время как транспортное средство 10 эксплуатируется, таким как человек, мусорный бак, велосипед или другой неодушевленный объект.
Система 26 парковки может быть выполнена с возможностью контролировать расстояние между транспортным средством 10 и объектом 90 на основании множества зон, простирающихся вокруг транспортного средства. Зоны могут быть ранжированы на основании расстояний от транспортного средства 10. Например, Зона n может быть ближайшей зоной к транспортному средству 10, а Зона n+1 может быть самой дальней зоной от транспортного средства 10, в которой объект 90 может быть выявлен множеством датчиков 70 парковки. В некоторых вариантах осуществления, Зона n+1 может быть ближайшей зоной к транспортному средству 10, а Зона n может быть самой дальней зоной от транспортного средства 10, в которой объект 90 может быть выявлен множеством датчиков 70 парковки.
Как использовано в настоящем раскрытии и показано на фиг. 2, Зона 1 может соответствовать первому расстоянию, D1, от транспортного средства 10. Зона 2 может соответствовать второму расстоянию, D2, от транспортного средства 10. Зона 3 может соответствовать третьему расстоянию, D3, от транспортного средства 10.
Контроллер 100 может находиться в сообщении с контроллером 34 силовой передачи, модулем 62 ABS и модулем 76 парковки. Контроллер 100 может быть системным контроллером транспортного средства или множеством контроллеров в сообщении друг с другом по сети CAN BUS (шины локальной сети контроллеров).
Контроллер 100 может быть выполнен с возможностью устанавливать заданное пороговое значение скорости транспортного средства, связанное с зоной, в то время как система 26 парковки выполняет маневр постановки на стоянку. Контроллер 100 также может быть выполнен с возможностью устанавливать заданное пороговое значение скорости транспортного средства, связанное с зоной, в то время как транспортное средство 10 является действующим и не выполняет маневр постановки на стоянку. Заданное пороговое значение замедления, связанное с зоной, может меняться в зависимости от того, является ли транспортное средство выполняющим или не выполняющим маневр постановки на стоянку.
Контроллер 100 может быть выполнен с возможностью устанавливать заданное замедление, связанное с зоной, в то время как система 26 парковки выполняет маневр постановки на стоянку. Контроллер 100 также может быть выполнен с возможностью устанавливать заданное замедление, связанное с зоной, в то время как транспортное средство 10 является действующим и не выполняет маневр постановки на стоянку. Заданное замедление, связанное с зоной, может меняться в зависимости от того, является ли транспортное средство выполняющим или не выполняющим маневр постановки на стоянку.
Заданное замедление может быть темпом, с которым снижается скорость транспортного средства. На основании заданной скорости транспортного средства, заданного замедления, положения передачи силовой передачи, запроса тормозного момента, максимального тормозного момента на выходном валу, зоны и направления колес транспортного средства, контроллер 100 может быть выполнен с возможностью выдавать параметр комфорта торможения, чтобы оказывать влияние на тормозной момент на выходном валу, прикладываемый к тормозному узлу 60.
Параметр комфорта торможения может давать транспортному средству 10 возможность обеспечивать комфортную или плавную остановку по мере того, как транспортное средство 10 завершает маневр постановки на стоянку, что может указываться ссылкой как управление остановкой. Параметр комфорта торможения также может давать транспортному средству 10 возможность комфортно замедляться по мере того, как транспортное средство 10 приближается к объекту 90 спереди транспортного средства 10 в различных ситуациях, что может указываться ссылкой как управление скоростью. Параметр комфорта торможения может ограничивать применение тормозного насоса тормозного узла 60, чтобы постепеннее или комфортнее доводить транспортное средство 10 до остановки или снижения скорости.
Функция управления остановкой может активироваться по мере того, как транспортное средство 10 приближается к объекту 90 во время маневра постановки на стоянку. Контроллер 100 может быть запрограммирован, в то время как транспортное средство 10 выполняет маневр постановки на стоянку относительно объекта 90, контролировать скорость транспортного средства 10. Контроллер 100 может сравнивать текущую скорость транспортного средства с заданным пороговым значением скорости, связанным с текущей зоной и расстоянием, D1, между транспортным средством 10 и объектом 90. Контроллер 100 может давать команду уменьшения крутящего момента на выходном валу силовой передачи 20, если скорость транспортного средства 10 превышает заданное пороговое значение скорости транспортного средства, связанное с текущей зоной. Уменьшение крутящего момента на выходном валу силовой передачи 20 может быть основано на параметре комфорта торможения, из условия чтобы скорость транспортного средства 10 становилась меньшей, чем или близкой к заданному пороговому значению скорости транспортного средства, связанному с текущей зоной, до завершения маневра постановки на стоянку. Крутящий момент на выходном валу силовой передачи 20 может уменьшаться по меньшей мере до завершения маневра постановки на стоянку. В по меньшей мере одном варианте осуществления, крутящий момент на выходном валу силовой передачи 20 может постепенно уменьшаться по мере того, как транспортное средство 10 постепенно перемещается ближе к объекту 90.
Контроллер 100 может быть запрограммирован, в то время как транспортное средство 10 выполняет маневр постановки на стоянку относительно объекта 90, контролировать расстояние, D2, между транспортным средством 10 и объектом 90. Контроллер 100 может приводить в действие тормозную систему 24, чтобы снижать скорость транспортного средства, из условия чтобы скорость транспортного средства 10 становилась меньшей, чем или близкой к заданному пороговому значению скорости транспортного средства, связанному с текущей зоной, если скорость транспортного средств 10 превышает заданное пороговое значение скорости транспортного средства, связанное с расстоянием, D2. Приведение в действие тормозной системы 24 может быть основано на параметре комфорта торможения и по меньшей мере одном из скорости транспортного средства и заданного порогового значения скорости транспортного средства, связанного с расстоянием, D2. В по меньшей мере одном варианте осуществления, тормозной момент, приложенный к тормозному узлу 60, может постепенно увеличиваться по мере того, как транспортное средство постепенно перемещается ближе к объекту 90. Расстояние, D1, может быть большим, чем расстояние, D2.
Контроллер 100 может быть запрограммирован, в то время как транспортное средство 10 приближается к завершению маневра постановки на стоянку относительно объекта 90, и в ответ на сигнал, указывающий объект 90 в пределах зоны, близкой к транспортному средству 10, приводить в действие тормозную систему 24. Тормозная система 24 может приводиться в действие, из условия чтобы транспортное средство 10 останавливалось в пределах заданного расстояния, P1 или P2, от объекта 90, без вмешательства водителя.
Тормозной момент, приложенный тормозным узлом 60 для остановки транспортного средства 10 в пределах заданного расстояния, P1 или P2, может быть меньшим, чем максимальная несущая способность по тормозному моменту тормозной системы 24, для того чтобы уменьшать шум, вибрацию и неплавность движения остановки. Снижение максимальной несущей способности по тормозному моменту может уменьшать величину качания подвески и улучшать комфорт пассажира или водителя во время остановки.
Контроллер 100 может быть запрограммирован останавливать транспортное средство 10 в пределах заданного расстояния от препятствия 92 без вмешательства водителя. Препятствие 92 может выявляться множеством датчиков 70 парковки, в то время как транспортное средство 10 выполняет маневр постановки на стоянку относительно объекта 90. В ответ на множество датчиков 70 парковки, выдающих сигнал, указывающий расстояние, D3, между транспортным средством и препятствием, контроллер 100 может быть запрограммирован приводить в действие тормозную систему 24, из условия чтобы транспортное средство 10 останавливалось в пределах заданного расстояния, P3, от препятствия 92.
Тормозной момент, приложенный тормозным узлом 60 для остановки транспортного средства 10 в пределах заданного расстояния, P3, от препятствия 92, может быть меньшим, чем максимальная несущая способность по тормозному моменту, для того чтобы уменьшать шум, вибрацию и неплавность движения остановки. Тормозной момент, приложенный к тормозному узлу 60, может быть большим, чем тормозной момент, прикладываемый тормозным узлом, когда препятствие 92 не выявлено. Это увеличение тормозного момента, приложенного к тормозному узлу 60, может увеличивать величину качания подвески и может быть менее комфортным, чем остановка, выполняемая для завершения маневра постановки на стоянку.
Со ссылкой на фиг. 3, показан вид в перспективе транспортного средства 10 на наклонной поверхности 110, приближающегося к другому транспортному средству. Функция управления скоростью может активироваться по мере того, как транспортное средство 10 приближается к объекту 80 спереди транспортного средства 10, такому как другое транспортное средство, тем временем, не выполняя маневр постановки на стоянку. Транспортное средство 10 может быть действующим на наклонной поверхности 110 и иметь угол 112 продольного наклона. Транспортное средство 10 может быть снабжено автономным датчиком угла продольного наклона транспортного средства или может включать в себя модуль управления кузовом, выполненный с возможностью выдавать различные динамические параметры транспортного средства, такие как угол крена, угол продольного наклона и угловая скорость рыскания.
Контроллер 100 может быть запрограммирован контролировать расстояние между транспортным средством 10 и объектом 90, в то время как транспортное средство 10 действует на наклонной поверхности 110. Контроллер 100 может иметь целевую скорость транспортного средства, связанную с различными расстояниями между транспортным средством 10 и объектом 90. В ответ на расстояние, D, между транспортным средством 10 и объектом 90, становящееся меньшим, чем первое пороговое расстояние, t1, и скорость транспортного средства 10, являющуюся большей, чем целевая скорость транспортного средства, связанная с расстоянием, D, контроллер 100 может снижать скорость транспортного средства 10 приблизительно до целевой скорости транспортного средства, связанной с расстоянием, D, без вмешательства водителя. Скорость транспортного средства 10 может снижаться на основании угла 112 продольного наклона и расстояния, D.
Скорость транспортного средства 10 может снижаться, из условия чтобы расстояние, D, между транспортным средством 10 и объектом 90 становилось большим, чем первое пороговое расстояние, t1. Контроллер 100 может быть запрограммирован снижать скорость транспортного средства 10 посредством уменьшения крутящего момента на выходном валу силовой передачи 20 или ввода в действие тормозной системы 24. Крутящий момент на выходном валу силовой передачи 20 может уменьшаться до тех пор, пока расстояние, D, между транспортным средством 10 и объектом 90 не становится большим, чем первое пороговое расстояние, t1, без вмешательства водителя.
В по меньшей мере одном варианте осуществления, крутящий момент на выходном валу силовой передачи 20 может уменьшаться посредством выдачи модифицированного положения педали акселератора. Модифицированное положение педали акселератора может давать команду уменьшения крутящего момента на выходном валу силовой передачи по сравнению с текущим положением педали акселератора. Модифицированное положение педали акселератора может быть основано на связанном с многомерной регулировочной характеристикой педали, соотносящей положение педали акселератора с крутящим моментом на выходном валу силовой передачи.
Контроллер 100 может снижать скорость транспортного средства 10, вводя в действие тормозную систему 24. Тормозная система 24 может вводиться в действие, чтобы выдавать тормозной момент на тормозной узел 60, в то время как расстояние, D, между транспортным средством 10 и объектом 90 является меньшим, чем второе пороговое расстояние, t2. Тормозной момент может быть основан на заданном замедлении, расстоянии, D, и параметре комфорта торможения. Второе пороговое расстояние, t2, может быть меньшим, чем первое пороговое расстояние t1.
Со ссылкой на фиг. 4, показан примерный способ управления скоростью транспортного средства. Способ может принимать сигнал, указывающий расстояние между транспортным средством 10 и объектом 90, и скорость транспортного средства. На вершине 200 блок-схемы, способ может определять, движется ли транспортное средство 10 в направлении объекта 90. Транспортное средство 10 может быть движущимся в направлении объекта 90, если первое расстояние между транспортным средством и объектом 90 становится меньшим, чем первое пороговое расстояние, а скорость транспортного средства является большей, чем заданная скорость, связанная с первым пороговым расстоянием. Первое пороговое расстояние может быть расстоянием, связанным с самой дальней зоной от транспортного средства 10, Зоной 1, в которой объект 90 может выявляться множеством датчиков 70 парковки. Если транспортное средство 10 не движется в направлении объекта 90, способ может возобновлять выполнение цикла.
На вершине 202 блок-схемы, способ может определять, выполняет ли транспортное средство 10 маневр постановки на стоянку. Транспортное средство 10 может быть выполняющим маневр постановки на стоянку, если система 26 парковки идентифицировала место постановки на стоянку, а силовая передача 20 и система 22 рулевого управления эксплуатироваться, чтобы направлять транспортное средство 10 на место постановки на стоянку. Если транспортное средство 10 является выполняющим маневр, способ может переходить на вершину 204 блок-схемы. Если транспортное средство 10 не должно выполнять маневр постановки на стоянку, тем временем, двигаясь в направлении объекта 90, способ может переходить на вершину 206 блок-схемы.
На вершине 204 блок-схемы, способ может сравнивать скорость транспортного средства с заданной скоростью маневра постановки на стоянку, связанной с первым пороговым расстоянием. Если скорость транспортного средства является большей, чем заданная скорость маневра постановки на стоянку, связанная с первым пороговым расстоянием, способ может уменьшать крутящий момент на выходном валу силовой передачи на вершине 208 блок-схемы. На вершине 208 блок-схемы, крутящий момент на выходном валу силовой передачи может уменьшаться на основании скорости транспортного средства и заданного порогового значения замедления, из условия чтобы замедление транспортного средства было меньшим, чем заданное пороговое значение замедления. Ограничение замедления транспортного средства меньшим, чем заданное пороговое значение замедления, может улучшать комфорт пассажиров или водителя транспортного средства, так как транспортное средство 10 замедляется до в пределах заданной скорости маневра постановки на стоянку, связанной с первым пороговым расстоянием. Если скорость транспортного средства не будет большей, чем заданная скорость маневра постановки на стоянку, связанная с первым пороговым расстоянием, способ может возобновлять выполнение цикла.
Способ может продолжаться, чтобы оценивать расстояние между транспортным средством 10 и объектом 90. На вершине 210 блок-схемы, способ может сравнивать расстояние между транспортным средством 10 и объектом 90 с вторым пороговым расстоянием. Если расстояние между транспортным средством 10 и объектом 90 является меньшим, чем второе пороговое расстояние, способ может приводить в действие тормозную систему 24 на вершине 212 блок-схемы. Тормозная система 24 может приводиться в действие для снижения скорости транспортного средства на основании расстояния между транспортным средством 10 и объектом 90, и заданного порогового значения замедления, основанного на параметре комфорта торможения. Если расстояние между транспортным средство 10 и объектом 90 будет большим, чем второе пороговое расстояние, способ может продолжаться на вершине 214 блок-схемы.
На вершине 214 блок-схемы, способ может продолжать оценивать, находится ли препятствие в поле зрения множества датчиков 70 парковки. Способ может оценивать расстояние между транспортным средством 10 и препятствием 92. Если препятствие 92 выявлено на расстоянии между транспортным средством 10 и препятствием 92, меньшем, чем третье пороговое расстояние, в то время как транспортное средство выполняет маневр постановки на стоянку, способ может приводить в действие тормозную систему 24. Тормозная система 24 может приводиться в действие на основании параметра комфорта торможения, из условия чтобы транспортное средство 10 останавливалось в пределах заданного расстояния, P3, между транспортным средством 10 и препятствием 92. Если расстояние между транспортным средством 10 и препятствием 90 будет большим, чем третье пороговое расстояние, способ может возобновлять выполнение цикла.
Возвращаясь на вершину 206 блок-схемы, способ может принимать сигнал, указывающий угол 112 продольного наклона. Транспортное средство 10 может быть работающим на наклонной поверхности 110, если угол 112 продольного наклона является большим, чем пороговое значение угла продольного наклона. Если транспортное средство действует на наклонной поверхности 110, способ может продолжаться на вершине 216 блок-схемы. Если угол продольного наклона будет меньшим, чем пороговое значение угла продольного наклона, способ может возобновлять выполнение цикла.
На вершине 216 блок-схемы, способ может сравнивать скорость транспортного средства с пороговым значением скорости транспортного средства, связанным с первым пороговым расстоянием. Если скорость транспортного средства является большей, чем пороговое значение скорости транспортного средства, связанное с первым расстоянием, способ может эксплуатировать силовую передачу 20 для удовлетворения порогового значения скорости транспортного средства на вершине 218 блок-схемы. Крутящий момент на выходном валу силовой передачи может уменьшаться на основании угла 112 продольного наклона и расстояния между транспортным средством и объектом 90. Крутящий момент на выходном валу силовой передачи может уменьшаться по меньшей мере до тех пор, пока расстояние между транспортным средством 90 и объектом не становится большим, чем первое пороговое расстояние. Если скорость транспортного средства будет меньшей, чем пороговое значение скорости транспортного средства, связанное с первым расстоянием, способ может возобновлять выполнение цикла.
На вершине 220 блок-схемы, способ может сравнивать расстояние между транспортным средством 10 и объектом 90 с вторым пороговым расстоянием. Если расстояние между транспортным средством 10 и объектом 90 является меньшим, чем второе пороговое расстояние, а скорость транспортного средства является большей, чем заданная скорость, связанная с вторым пороговым расстоянием, способ может приводить в действие тормозную систему 24 на вершине 222 блок-схемы. Тормозная система 24 может приводиться в действие для снижения скорости транспортного средства на основании расстояния и заданного порогового значения замедления, связанного с вторым пороговым расстоянием. Если расстояние между транспортным средством 10 и объектом 90 будет большим, чем второе пороговое расстояние, а скорость транспортного средства будет меньшей, чем заданная скорость, связанная с вторым пороговым расстоянием, способ может возобновлять выполнение цикла.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы изобретения. Предпочтительнее, формулировки, используемые в описании изобретения, являются скорее формулировками описания, нежели ограничения, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Дополнительно, признаки различных вариантов осуществления реализации могут комбинироваться для формирования дополнительных вариантов осуществления изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Транспортное средство, система контроля запасной шины и способ контроля использования запасной шины
Конфигурируемая пользователем система предупреждений о парковке транспортного средства
Способ определения местоположения телефона как ключа на основе обнаружения объекта, соответствующие транспортное средство и машиночитаемый носитель
Компонент определения угла сцепки с подсветкой
Люминесцентный компонент выявления угла сцепного устройства

