Результат интеллектуальной деятельности: ОБНАРУЖЕНИЕ ОБЪЕКТА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Настоящее изобретение относится к обнаружению объекта для транспортных средств.
УРОВЕНЬ ТЕХНИКИ
[2] Службы такси накладывают многочисленные риски по отношению к путешественникам. Довольно часто в салоне транспортного средства случайно оставляются вещи, когда пассажиры спешат сесть в такси и выйти из такси. Автономные транспортные средства представляют дополнительные проблемы, поскольку поведение пассажира является неконтролируемым, оставляя возможности кражи поездки или оставления вещей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[3] Транспортное средство включает в себя пару камер, расположенных на транспортном средстве и ориентированных для обзора входа в транспортное средство. Транспортное средство также включает в себя процессор, сконфигурированный с возможностью сравнивать профильное изображение характерных черт лица пассажира от одной камеры из пары с фронтальным изображением характерных черт лица пассажира от другой камеры из пары. Процессор сконфигурирован с возможностью блокировать вход в транспортное средство в качестве реакции на различие характерных черт лица. Характерной чертой лица может быть нос или подбородок пассажира. В транспортном средстве одна камера из пары может располагаться на боковом зеркале заднего вида транспортного средства, а другая камера из пары располагается в пассажирском салоне транспортного средства. Процессор может быть дополнительно сконфигурирован с возможностью формировать трехмерную модель характерных черт лица с помощью профильного изображения и фронтального изображения, при этом характерные черты лица являются разными, когда трехмерная модель является неправильной.
[4] Транспортное средство включает в себя пару камер, расположенных на транспортном средстве и ориентированных для обзора входа в транспортное средство с различных точек обзора. Транспортное средство включает в себя процессор, сконфигурированный с возможностью сравнивать профильное изображение пассажира от одной камеры из пары с фронтальным изображением пассажира от другой камеры из пары. Процессор сконфигурирован с возможностью выключать транспортное средство. Процессор может выключать транспортное средство в ответ на то, что фронтальное и профильное изображения соответствуют разным формам для одной и той же лицевой структуры. Лицевая структура может представлять собой глазную впадину пассажира, или структуру щеки пассажира, или цвет глаз пассажира. Процессор может быть дополнительно сконфигурирован с возможностью блокировать транспортное средство, после того как пассажир входит. Процессор может быть дополнительно сконфигурирован с возможностью издавать сигнал тревоги транспортного средства в качестве реакции на то, что фронтальное и профильное изображения соответствуют разным формам для одной и той же лицевой структуры.
[5] Транспортное средство включает в себя процессор, сконфигурированный с возможностью предоставлять уведомление пассажиру о том, что объект был оставлен в транспортном средстве. Процессор может предоставлять уведомление в качестве реакции на то, что визуальный детектор, имеющий пару камер, расположенных в транспортном средстве и ориентированных для обзора салона транспортного средства с различных точек обзора, распознает объект в изображениях, захваченных посредством пары камер, после того как пассажир выходит из транспортного средства. Процессор может предоставлять уведомление в качестве реакции на то, что датчик массы, имеющий весы, расположенные в транспортном средстве, выявляет вес объекта, после того как пассажир выходит из транспортного средства. Уведомление может представлять собой электронное сообщение, например, SMS-сообщение, каковое электронное сообщение может отправляться по протоколам связи 802.11 транспортного средства. Упомянутый объект может быть сотовым телефоном, при этом уведомление является звуковым тревожным сигналом в качестве реакции на то, что объект является сотовым телефоном. Визуальный детектор может выполнять обнаружение края в отношении всех объектов в поле обзора пары камер, при этом визуальный детектор может проверять объекты, распознанные из пары камер, и поле обзора может быть областью, измеренной посредством весов.
Краткое описание чертежей
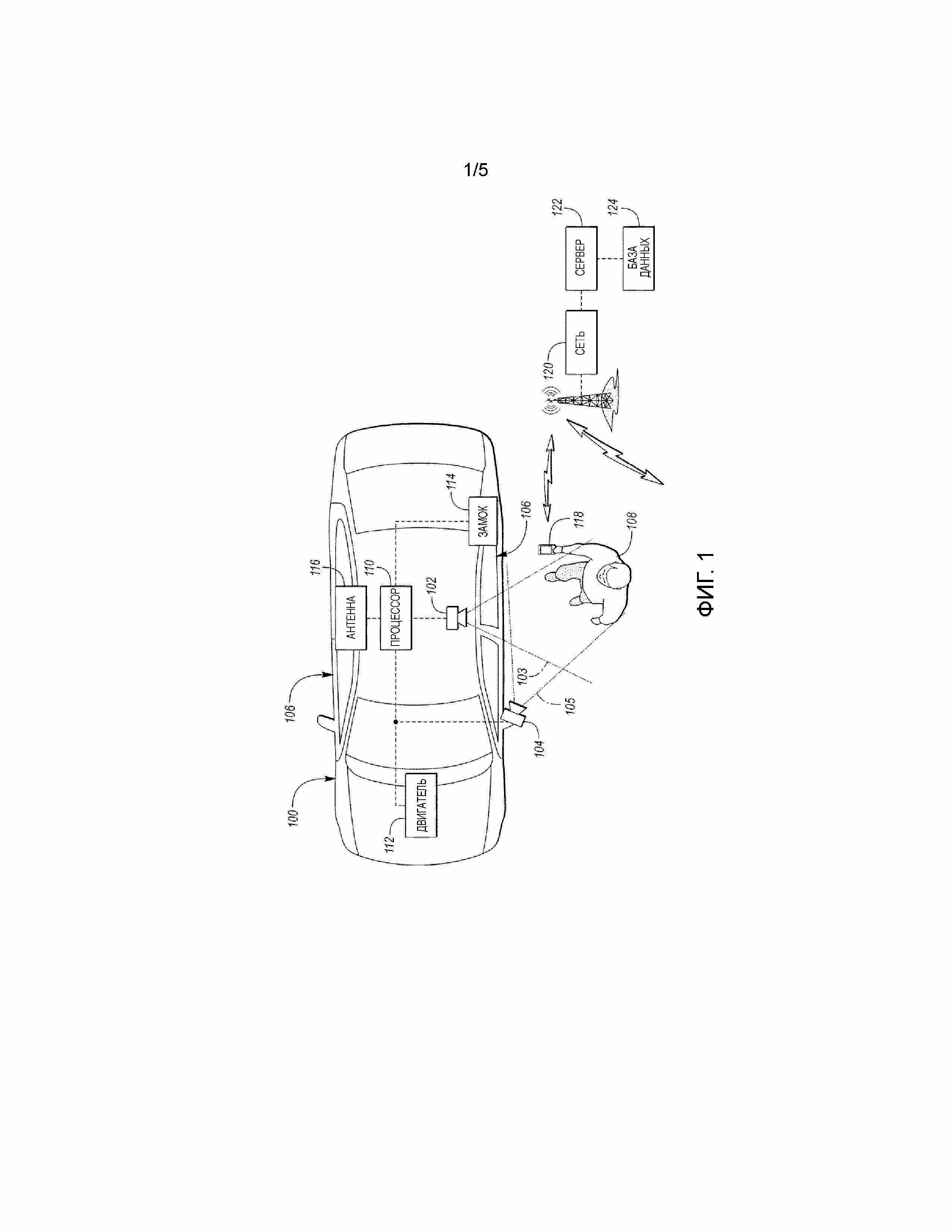
[6] Фиг. 1 - вид сверху транспортного средства, имеющего, по меньшей мере, пару камер, ориентированных, чтобы осматривать вход транспортного средства или фотографически захватывать садящегося;
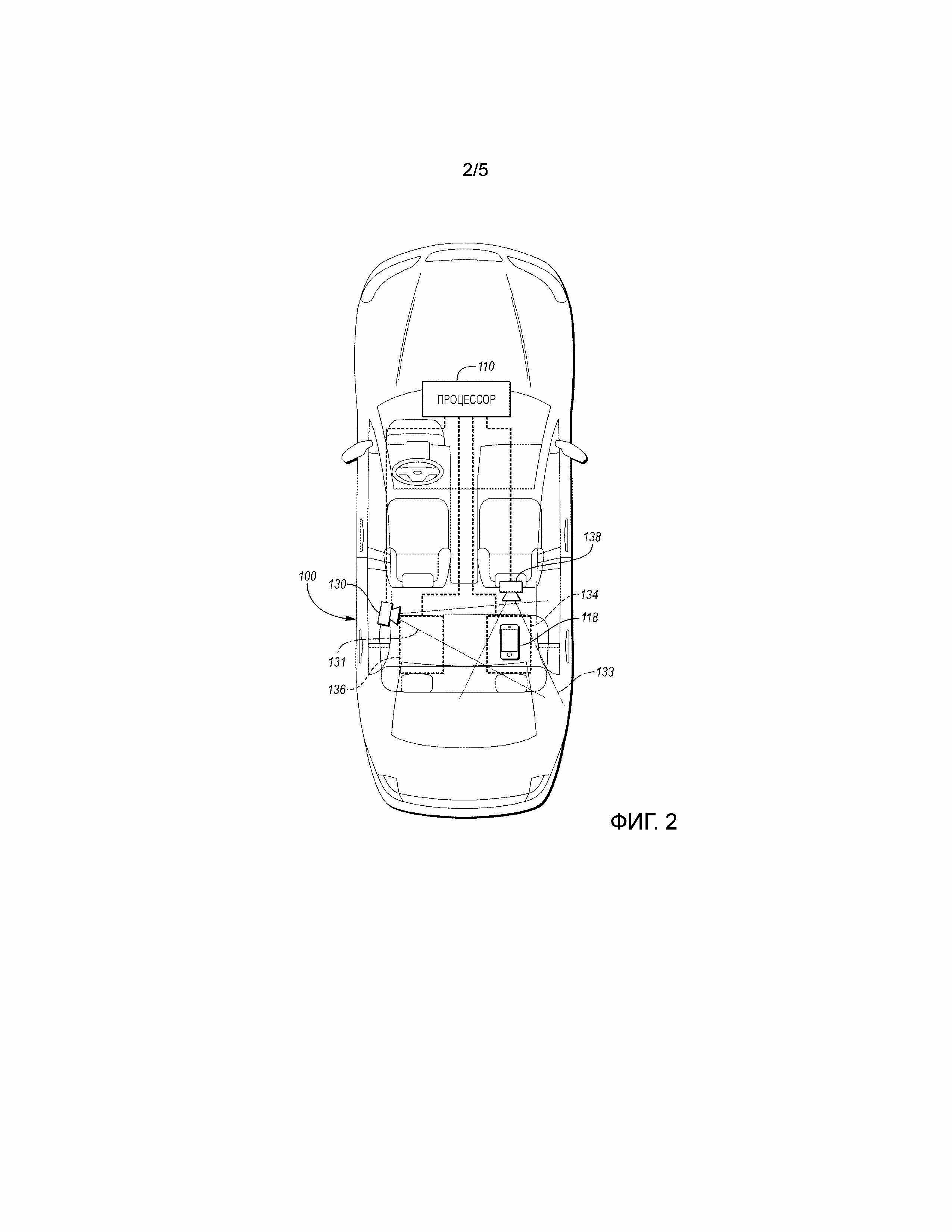
[7] Фиг. 2 - вид сверху транспортного средства, имеющего датчики веса и, по меньшей мере, пару камер, ориентированных, чтобы обнаруживать объекты в пассажирском салоне;
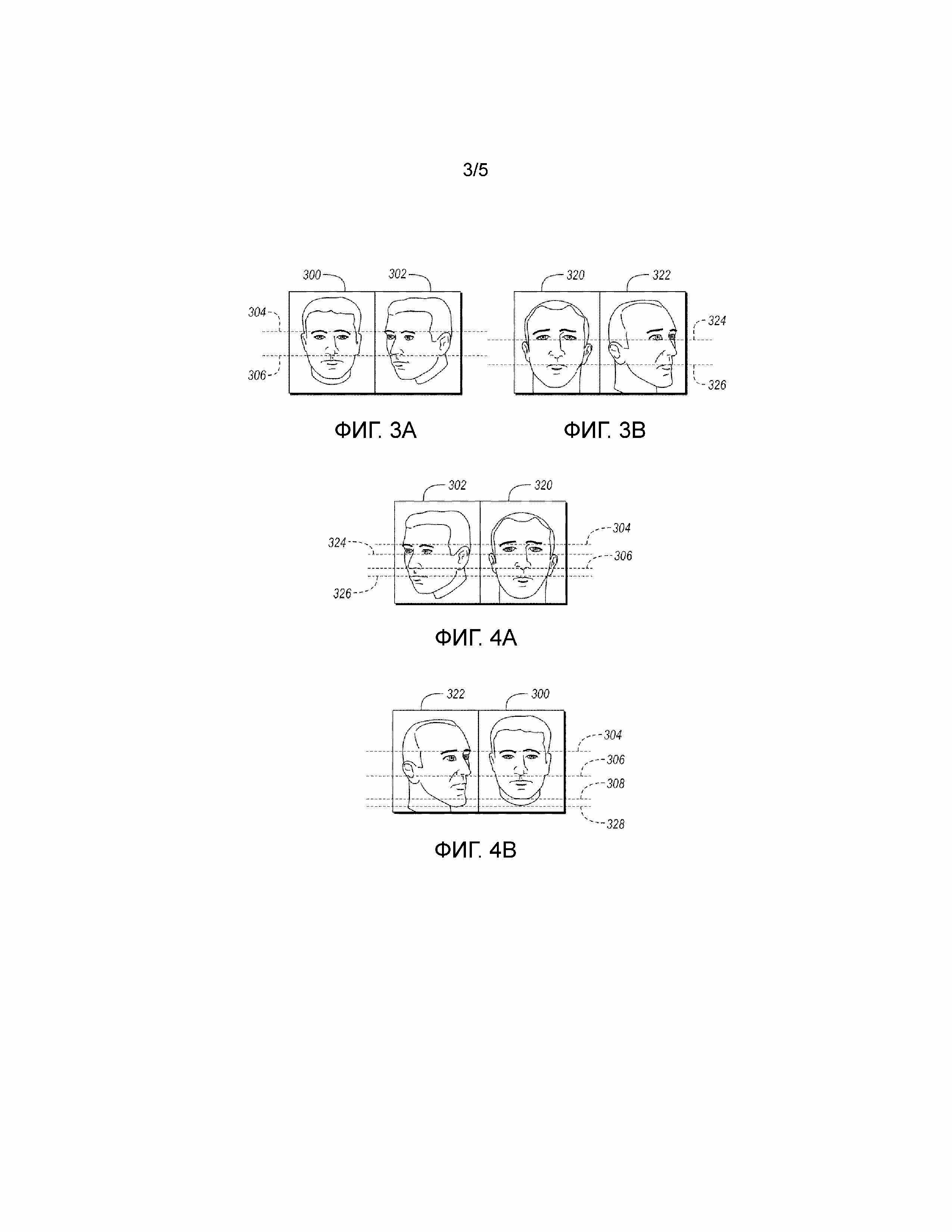
[8] Фиг. 3A - вид спереди и в профиль пассажира;
[9] Фиг. 3B - вид спереди и в профиль другого пассажира;
[10] Фиг. 4A - сравнение вида в профиль первого пассажира с видом спереди второго пассажира;
[11] Фиг. 4B - сравнение вида спереди первого пассажира с видом в профиль второго пассажира;
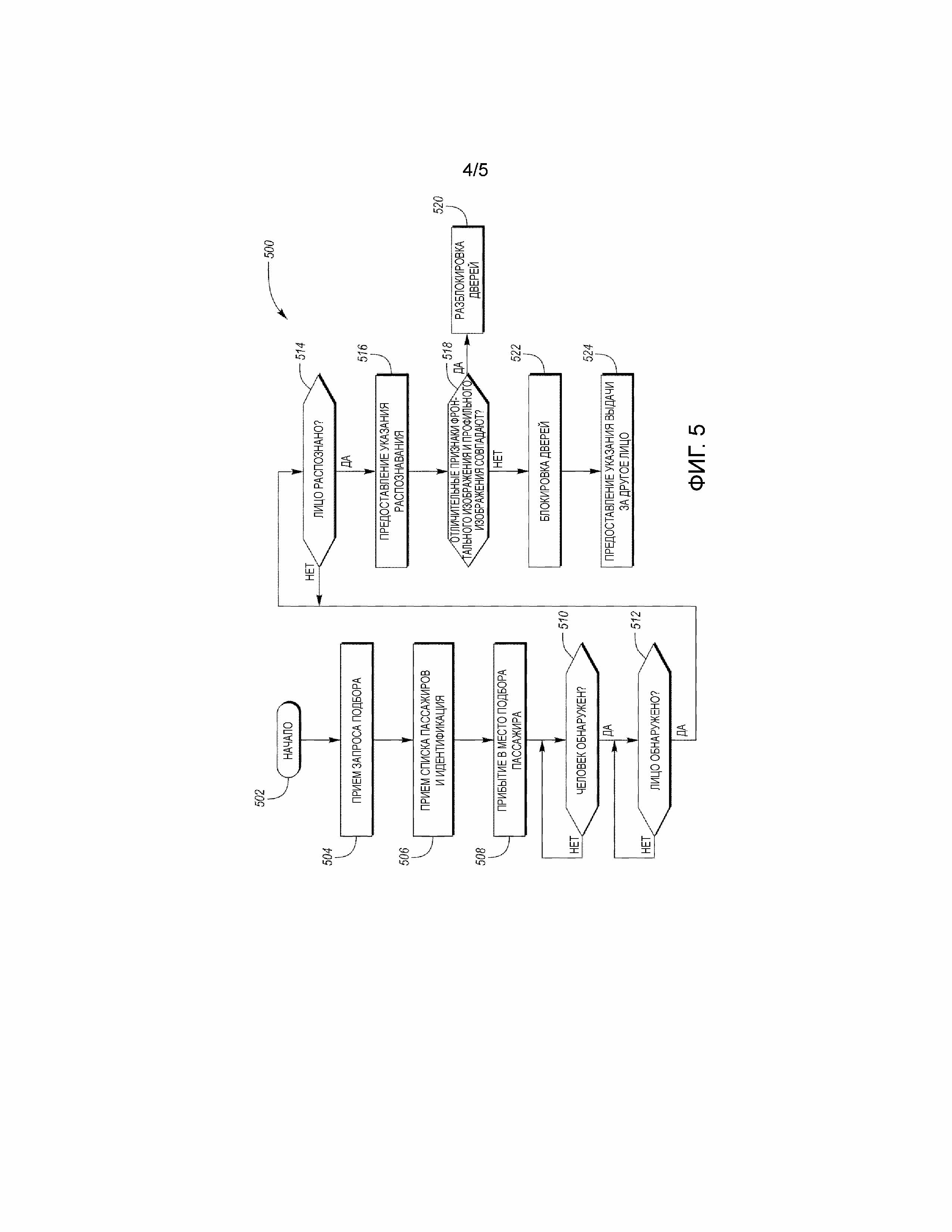
[12] Фиг. 5 - блок-схема последовательности операций обнаружения нелегального пассажира; и
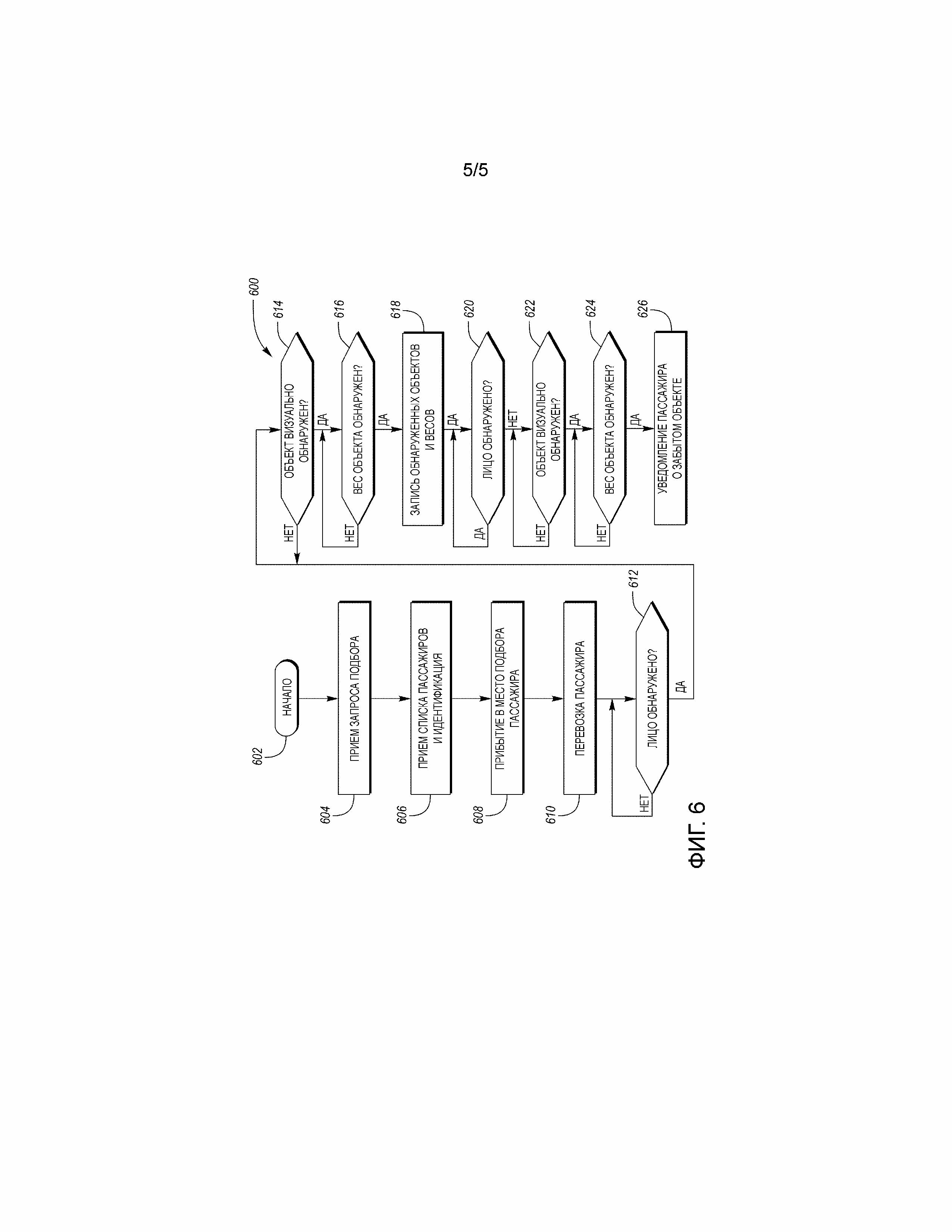
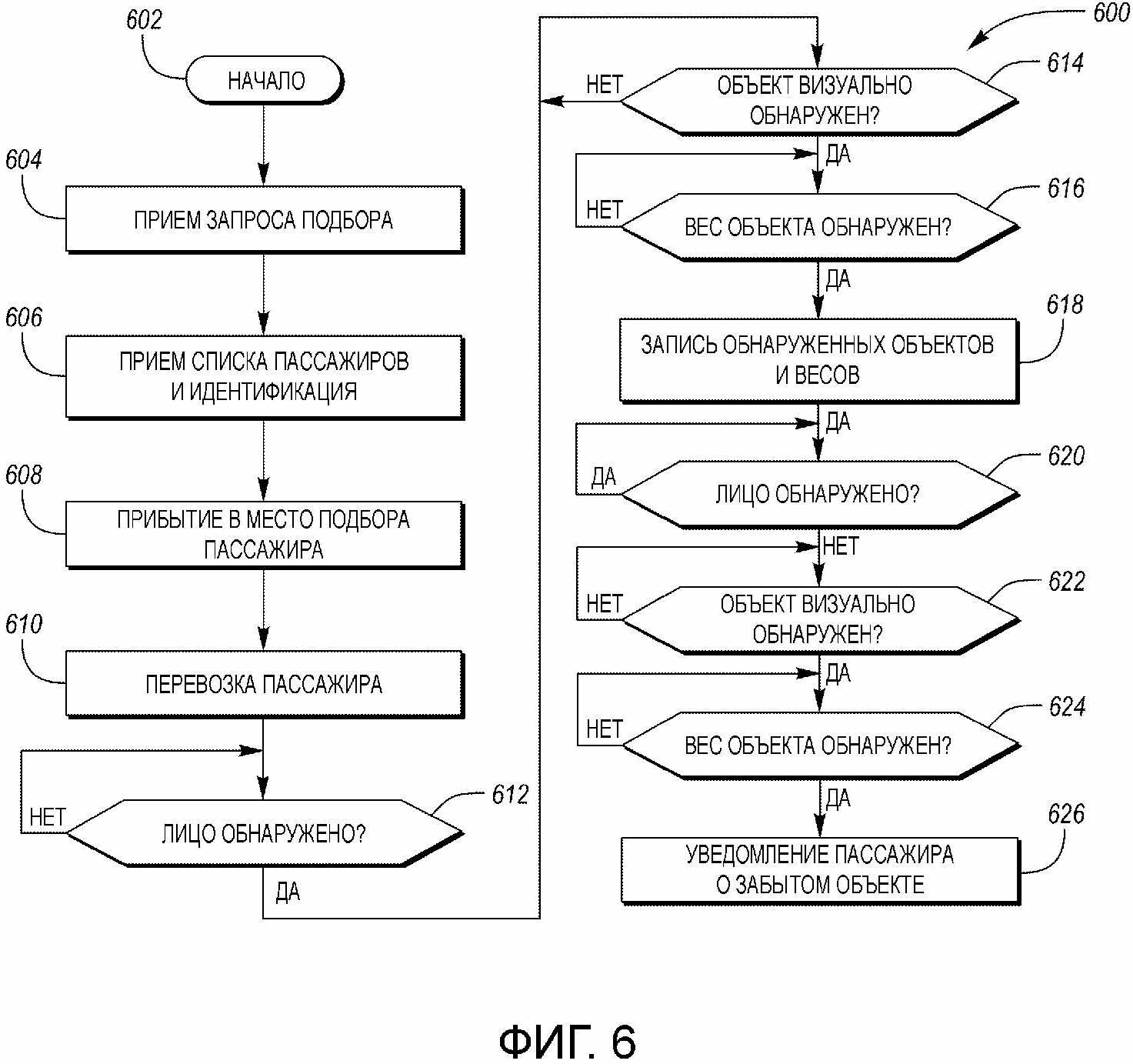
[13] Фиг. 6 - блок-схема последовательности операций обнаружения объекта, оставленного в транспортном средстве.
Подробное описание изобретения
[14] Варианты осуществления настоящего изобретения описываются в данном документе. Должно быть понятно, однако, что раскрытые варианты осуществления являются просто примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Чертежи необязательно начерчены по масштабу; некоторые детали могут быть преувеличены или минимизированы, чтобы показывать подробности конкретных компонентов. Следовательно, конкретные структурные и функциональные детали, раскрытые в данном документе, не должны интерпретироваться как ограничивающие, а просто как представляющие основу для изучения специалистом в данной области техники, чтобы по-разному применять настоящее изобретение. Как поймут специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любой один из чертежей, могут быть объединены с признаками, иллюстрированными в одном или более других чертежах, чтобы создавать варианты осуществления, которые явно не проиллюстрированы или описаны. Комбинации проиллюстрированных признаков предоставляют характерные варианты осуществления для типичных прикладных задач. Различные комбинации и модификации признаков согласуются с учениями этого изобретения, однако, могут быть желательны для конкретных применений или реализаций.
[15] С появлением автономных транспортных средств автономные такси могут подбирать и высаживать пассажиров без водителей-людей. Множество пассажиров могут загрузиться в транспортное средство в различные моменты времени, известные как формирование цепочки поездки или совместное использование. Пассажиры могут запрашивать подбор через приложение или другое средство и отправлять идентификацию водителю или автономному транспортному средству. Пассажирам может требоваться ожидать в течение больших периодов времени. Упрямые или неуступчивые пассажиры могут пытаться украсть транспортные средства, предназначенные для других пассажиров, для того, чтобы ускорять свою поездку. Система обнаружения и распознавания лица может быть использована, чтобы определять, запросил ли или зарезервировал пассажир данное транспортное средство. Транспортное средство может запрашивать и принимать профиль пассажира, включающий в себя идентифицирующие фотографии предназначенных пассажиров или запрашивающих пассажиров. Транспортное средство может сравнивать садящихся пассажиров со списком пассажиров и предоставлять обратную связь пассажирам, либо уведомляя их об их несанкционированном статусе или предотвращая доступ в пассажирский салон.
[16] Злонамеренные пассажиры могут пытаться выдавать себя за другое лицо или иначе скрывать свою личность. Например, если жертва кражи поездки известна, изображение может удерживаться перед лицом вора поездки, чтобы изображать жертву. В более тщательно разработанной схеме вор поездки может создавать маски, чтобы выдавать себя за пассажира. Система обнаружения и распознавания лица может быть дополнительно выполнена с возможностью предотвращать кражи поездок и способствуя другим задачам автономного такси.
[17] Обращаясь к фиг. 1, транспортное средство 100 включает в себя пары камер 102, 104, расположенные на транспортном средстве и в зоне обзора входа 106 транспортного средства, имеющие поля обзора 103, 105, соответственно. Транспортное средство может быть любым типом системы перевозок, которая включает в себя автобусы, автофургоны, поезда, самолеты, суда и автомобили. В другом варианте осуществления камеры 102, 104 могут быть расположены рядом с полосой для такси или зоной подбора такси, чтобы наблюдать за въездом и выездом всех такси. Камеры 102, 104, все могут находиться вокруг транспортного средства 100 и быть нацелены на каждый вход 106 в транспортное средство с различных углов. Может быть использован любой вид камеры. Когда пассажир 108 приближается к транспортному средству 100, процессор 110, ассоциированный с камерами 102, 104, может выполнять алгоритм обнаружения лица (например, Eigen-faces), чтобы идентифицировать лицо пассажира. После того как лицо обнаружено, алгоритм распознавания лица (например, анализ основных компонентов; линейный дискриминантный анализ; соответствие адаптивной сетчатой номограмме; скрытая Марковская модель; изучение многолинейного подпространства; и соответствие динамической связи) может сравнивать лицо пассажира с изображением, предоставленным в списке пассажиров. После того как соответствие найдено, процессор может определять, имела ли место выдача лица за другого.
[18] Процессор 110 может использовать другой набор алгоритмов, чтобы обнаруживать, являются ли профильное изображение и фронтальное изображение одинаковыми. Процессор может обнаруживать ненормальности с помощью составной или трехмерной структуры двух изображений. Другой алгоритм может сравнивать характерные черты лица из двух изображений. Характерные черты лица, как описано более подробно ниже, могут включать в себя глаза, глазные впадины, подбородки, носы, брови, волосные линии, характерные черты губ, уши и структуру щеки. Помимо характерных черт лица процессор 110 может выполнять DNA-сопоставление, сопоставление сетчатки глаз, сопоставление вен, сопоставление образца голоса, сопоставление пароля, аутентификацию по беспроводному протоколу.
[19] Процессор 110 может быть отдельным процессором или фрагментом системы управления транспортным средством. В то время как иллюстрируется как один процессор, процессор 110 может быть частью более крупной системы управления и может управляться посредством различных других контроллеров по всему транспортному средству 100, таких как системный контроллер транспортного средства (VSC). Следовательно, должно быть понятно, что процессор 110 и один или более других процессоров или контроллеров могут совокупно называться "процессором", который использует различные алгоритмы, чтобы управлять транспортным средством в ответ на сигналы от различных датчиков, чтобы управлять функциями, такими как пуск/останов двигателя 112 и приведение в действие замка 114 для входа 106. Процессор 110 может включать в себя микропроцессор или центральный процессор (CPU) на связи с различными типами машиночитаемых запоминающих устройств или носителей. Машиночитаемые запоминающие устройства или носители могут включать в себя энергозависимое и энергонезависимое хранилище в постоянном запоминающем устройстве (ROM), оперативном запоминающем устройстве (RAM) и поддерживающей активность памяти (KAM), например. KAM является постоянной или энергонезависимой памятью, которая может быть использована, чтобы хранить различные операционные переменные, в то время как CPU выключен. Машиночитаемые запоминающие устройства или носители могут быть реализованы с помощью любого из множества известных запоминающих устройств, таких как PROM (программируемое постоянное запоминающее устройство), EPROM (электронное PROM), EEPROM (электрически стираемое PROM), флэш-памяти или любых других электрических, магнитных, оптических или комбинации запоминающих устройств, способных хранить данные, некоторые из которых представляют исполняемые инструкции, используемые контроллером в управлении двигателем или транспортным средством.
[20] Процессор 110 может управлять входом 106 в транспортное средство 100 посредством замка 114. Процессор 110 может зацеплять замок 114, чтобы препятствовать доступу ко входу до тех пор, пока доступ не будет разрешен, или расцеплять замок 114 до тех пор, пока доступ не будет запрещен. Система замка 114 может быть стандартной системой замка транспортного средства с процессором, предназначенным, чтобы запрещать доступ для неавторизованных пассажиров.
[21] Процессор 110 может быть сконфигурирован с возможностью связываться с внешним окружением через антенну или антенную систему 116. Антенна может быть сконфигурирована, чтобы связываться через различные носители и частоты и протоколы (например, Bluetooth, CDMA, 802.11, SS7, MAP, Wi-Fi). Процессор 110 может принимать запросы подбора от пассажиров через антенну 116, вместе со списками пассажиров и изображениями. Антенна 116 может предоставлять средство связи между процессором 110 и различными другими сетями и системами. Например, процессор 110 может иметь доступ к сотовым номерам пассажиров, чтобы отправлять текстовые сообщения или иначе связываться с сотовыми телефонами 118 пассажиров. Процессор 110 может быть сконфигурирован с возможностью связываться с сетью 120 для того, чтобы принимать списки пассажиров и информацию о местоположении подбора от сервера 122. Сервер 122 может хранить информацию о пассажирах в базе данных 124 и обеспечивать транспортному средству 100 доступ к этой информации.
[22] Подключенное к сети транспортное средство 100 может отправлять информацию о пассажире 108 серверу 122 для подтверждения. В этой конфигурации вычислительная мощность, требуемая для распознавания, разгружается на сервер 122. Сервер 122 может связываться с транспортным средством 100 посредством зашифрованных и защищенных способов связи (например, TLS, IPSec), чтобы предотвращать перехват и изменение информации. Процессор 110 может выгружать принятые изображения на сервер 122 для распознавания.
[23] Обращаясь теперь к фиг. 2, транспортное средство 100 показано имеющим пару камер 130, 132, расположенных, чтобы осматривать салон транспортного средства 100, имеющих поля обзора 131, 133, соответственно. Камеры 130, 132 могут быть расположены, чтобы осматривать салон под различными углами. Процессор 110 может быть сконфигурирован с возможностью возвращать изображения от камер 130, 132 и обнаруживать объекты 118. Камеры 130, 132 могут обнаруживать объекты 118, которыми обладает пассажир, и отслеживать эти объекты 118 на всем протяжении поездки. Обнаружение объекта может выполняться с помощью множества способов. Некоторые способы могут быть использованы вместе друг с другом. Например, процессор 110 может обнаруживать объекты с помощью обнаружения краев или распознавания объекта. Одна форма распознавания объекта может использовать характеристические изображения аналогично распознаванию лица. База данных 124 может размещать характеристические изображения. Изображения, захваченные посредством камер 130, 132, могут быть отправлены наружу серверу 122 для обработки. Объекты 118 могут быть сотовыми телефонами или более крупными перевозимыми устройствами.
[24] В дополнение к визуальному контролю транспортное средство 100 может включать в себя датчики 134, 136 веса, чтобы определять, когда пассажир покинул транспортное средство, и когда объект 118 остался где-то в транспортном средстве. Датчики 134, 136 веса могут быть распределены по всему салону транспортного средства. Датчики 134, 136 веса могут быть на полах, в контейнерах и в каждой из областей сидения пассажиров. Датчики 134, 136 веса также могут быть расположены в отсеках хранения (например, багажнике).
[25] Процессор 110 может быть сконфигурирован с возможностью определять, когда объект 118 остался в транспортном средстве. Например, пассажиру 108 может быть назначен уникальный порядковый номер в базе данных. Все объекты 118, ассоциированные с пассажиром 108, могут быть отслежены в базе данных. Процессор 110 может определять, когда пассажир 108 покинул транспортное средство. Процессор 110 может быть запрограммирован, чтобы дополнительно определять, что объект 118 остался в транспортном средстве, когда объект 118 находится не поблизости к каким-либо пассажирам или в необычном месте (например, на полу). Процессор 110 может сопоставлять информацию, относящуюся к визуальному анализу, с информацией из анализа веса. Например, если объект обнаруживается в необычной области, и датчик веса обнаруживает тот же объект 118, процессор 110 может выполнять функцию, чтобы сигнализировать пассажирам (например, выключать транспортное средство, текст пассажиру, который сидел в этой области, текст всем пассажирам, чей объект или вещи были оставлены, подача гудка, регулировка освещения, предоставление уведомляющих голосовых команд). Функция может быть основана на типе обнаруженного объекта. Например, если обнаруживается сотовый телефон, транспортное средство может подавать гудок. Если обнаруживается книга, транспортное средство может отправлять текстовое сообщение на сотовый телефон пассажира. Процессор 110 может использовать визуальное обнаружение объекта, чтобы прогнозировать вес, ассоциированный с объектом 118. Например, если визуальное обнаружение объекта определяет, что оставленный объект 118 является сотовым телефоном, процессор 110 может сравнивать вес объекта 118, который был оставлен, с ожидаемым весом объекта 118. Если разница в весе находится в пределах ожидаемого диапазона (например, в пределах 5% ожидаемого веса), тогда процессор может сигнализировать пассажирам о том, что объект 118 был оставлен. Это сравнение может приводить в результате к уменьшению ложных срабатываний.
[26] Обращаясь к фиг. 3A, показаны фронтальное и профильное изображения 300, 302 пассажира. Отличительные признаки обоих изображений 300, 302 соответствуют и совмещаются, как показано с помощью линий 304, 306 отличительных признаков. Линии 304, 306 отличительных признаков указывают значимые места характерных черт пассажиров. Например, линия 304 отличительного признака совмещается с бровями пассажира в фронтальном и профильном изображениях 300, 302. Линия 304 отличительного признака также совмещается с верхним краем уха пассажира. Дополнительная линия 306 отличительного признака совмещается с точкой носа пассажира и нижним краем уха пассажира. Линии 304, 306 отличительных признаков могут быть использованы, чтобы сравнивать одного пассажира с другим. Например, показаны фронтальное и профильное изображения 320, 322 на фиг. 3B. Отличительные признаки обоих изображений 320, 322 соответствуют и совмещаются, как показано с помощью линий 324, 326 отличительных признаков. Линии 324, 326 отличительных признаков указывают значимые места характерных черт пассажиров. Например, линия 324 отличительного признака совмещается с бровями пассажира в фронтальном и профильном изображениях 320, 322. Линия 324 отличительного признака также совмещается с верхним краем уха пассажира. Дополнительная линия 326 отличительного признака совмещается с точкой носа пассажира и нижним краем уха пассажира. Процессор 110 может быть сконфигурирован с возможностью обнаруживать характерные черты лица, описанные посредством различных алгоритмов (например, локальный двоичный шаблон, отличительные признаки Хаара). Аналогичные алгоритмы могут сравнивать местоположения характерных черт лица из фронтального и профильного изображений 300, 302, 320, 322, чтобы определять, присутствует ли нелегальный пассажир.
[27] Обращаясь к фиг. 4A, показано сравнение изображения 302 и 320. Алгоритм, как упомянуто выше, используется, чтобы определять местоположение отличительных признаков, как показано в линиях 304, 306. Линии 304, 306 совмещаются с бровями и носом обоих изображений. Линии 304, 306, однако, совмещаются с ушами в изображении 302, кроме того, линии 324, 326 совмещаются с ушами в изображении 320. В ответ на это определение, что уши не имеют одинаковых относительных местоположений, процессор 110 может указывать, что происходит выдача за другое лицо.
[28] Обращаясь к фиг. 4B, показано сравнение изображения 300 и 322. Алгоритм, как упомянуто выше, используется, чтобы определять местоположение отличительных признаков, показанных в линиях 304, 306, 308, 310. Линии 304, 306 соответствуют бровям и носам в обоих изображениях 300, 322. Линии 308, 328 соответствуют характерным чертам подбородков в обоих изображениях 300, 322, которые не совпадают. Алгоритм, работающий на процессоре 110, может определять, что характерные черты подбородка не являются одинаковыми, и предоставлять указание, что происходит выдача за другое лицо.
[29] Обращаясь к фиг. 5, показана блок-схема 500 последовательности операций распознавания нелегального пассажира. Этап 502 начинает процесс. На этапе 504 процессор 110 или кластер принимает запрос подбора. Запрос может быть сначала принят на сервере и передан транспортному средству 100 после оплаты, или после того как другие требования были выполнены. На этапе 506 процессор 110 может принимать список пассажиров и идентификационную информацию от сервера 122. Идентификационная информация может включать в себя изображение пассажира для распознавания лица и информацию о характерных чертах лица для обнаружения нелегальных пассажиров. На этапе 508 транспортное средство 100 прибывает в запрошенное пассажирами место подбора. По прибытии процессор 110 может определять, присутствует ли объект-человек в месте подбора, на этапе 510. На этапе 512 процессор 110 может пытаться обнаружить лицо с помощью вышеупомянутых алгоритмов. Если лицо обнаруживается, процессор 110 может пытаться распознать лицо, сравнивая принятое изображение с изображениями из списка пассажиров. Транспортное средство 100 может предоставлять указание пассажиру, что лицо было распознано, посредством звучания гудка или визуальной индикации.
[30] Процессор 110 может быть дополнительно сконфигурирован с возможностью определять, попытался ли нелегальный пассажир получить доступ в транспортное средство, на этапе 518. Как упомянуто выше, профильное изображение может быть сравнено с фронтальным изображением, или два разных изображения могут быть сравнены, чтобы гарантировать, что один вид пассажира совпадает с другим видом пассажира. Если изображения совпадают, двери разблокируются на этапе 520. Если отличительные признаки не совпадают, двери блокируются на этапе 522. Двери могут быть сконфигурированы блокироваться по умолчанию и разблокироваться в ответ на совпадение или быть разблокированными по умолчанию и блокироваться по несовпадению. На этапе 524 пассажиру или физическому лицу предоставляется указание, что была обнаружена выдача за другое лицо. Указание может быть конкретной последовательностью звуков, тревожной сигнализацией или визуальным указанием. Какие-либо из этапов алгоритма 500 могут быть выполнены в различной последовательности в зависимости от предпочтений автономной конструкции.
[31] Сравнение может быть выполнено посредством составной модели двух изображений. Составная модель может быть трехмерной моделью двух изображений. В ответ на ошибку в создании трехмерной модели двери могут быть заблокированы, и вход в транспортное средство запрещен. Например, если алгоритм для формирования трехмерной модели из двух изображений имеет формирование ошибки, чтобы предотвращать неправильные модели, формирование ошибки может указывать, что нелегальный пассажир пытается получить доступ к транспортному средству. Доступ тогда предотвращается. Более чем два изображения могут быть использованы для формирования составной модели. Формирование трехмерных моделей известно в области техники (например, стереоскопическое 3D).
[32] Обращаясь к фиг. 6, изображается алгоритм 600 обнаружения объекта. На этапе 602 алгоритм начинается. На этапе 604 процессор 110 или кластер принимает запрос подбора. Запрос может быть сначала принят на сервере и передан транспортному средству 100 после оплаты, или после того как другие требования были выполнены. На этапе 606 процессор 110 может принимать список пассажиров и идентификационную информацию от сервера 122. Идентификационная информация может включать в себя изображение пассажира для распознавания лица и информацию о характерных чертах лица для обнаружения нелегальных пассажиров. На этапе 608 транспортное средство 100 прибывает в запрошенное пассажирами место подбора. На этапе 610 начинается перевозка пассажира. На этапе 612 обнаружение лица может быть выполнено, чтобы определять местоположение пассажира, и распознавание может быть выполнено, чтобы гарантировать, что пассажир находится в списке. Пассажир может быть идентифицирован в базе данных, и процессор 110 может отслеживать какие-либо объекты, идентифицированные как ассоциируемые с пассажиром. Обнаружение объекта может быть выполнено посредством любого алгоритма, известного специалистам в области техники. Обнаружение объекта может также включать в себя связь ближнего радиуса действия с электронными устройствами. На этапе 614 объекты, ассоциированные с каждым пассажиром, обнаруживаются и записываются для наблюдения. На этапе 616 объекты, отсоединенные от пассажиров, могут быть обнаружены в других областях транспортного средства для отслеживания. Например, багаж в багажном отсеке или объекты, размещенные на полу. Обнаружение может быть выполнено с помощью весовых систем. На этапе 618 объекты записываются вместе с ассоциированным визуальным профилем и оцененным весом.
[33] На этапе 620 обнаружение лица используется, чтобы определять, когда пассажир покинул транспортное средство. После ухода визуальное обнаружение объекта может быть использовано, чтобы определять, находятся ли все еще объекты, ассоциированные с пассажиром, в транспортном средстве, на этапе 622. На этапе 624 обнаружение веса может быть использовано, чтобы определять, находятся ли все еще объекты в транспортном средстве. На этапе 626 пассажир или пассажиры уведомляются с помощью множества средств. Например, фары транспортного средства или гудок могут быть приведены в действие. Текстовые сообщения могут быть использованы и отправлены на сотовые телефоны пассажиров. Визуальные указания могут также быть предоставлены пассажирам с помощью LCD-дисплеев.
[34] Транспортное средство может также идентифицировать и авторизовать пассажира через беспроводную связь. Например, пассажир может иметь устройство, сконфигурированное, чтобы соединяться с бортовыми системами связи через Wi-Fi или Bluetooth®. Транспортное средство может принимать идентификационный номер (например, IMEA-номер, MAC-адрес, UUID), назначенный пассажиру, вместе со списком пассажиров. Алгоритмы 500, 600 могут использовать сочетание вышеупомянутых способов вместе с идентификационными номерами, чтобы гарантировать, что правильный пассажир садится в транспортное средство. Транспортное средство может определять, что объект или устройство осталось в транспортном средстве, по силе сигнала устройства. Например, если пассажир остался в транспортном средстве - определение на основе лица и обнаружения веса - транспортное средство может наблюдать за силой сигнала устройства, используемого для посадки в транспортное средство. Если сила сигнала не уменьшается, транспортное средство может сигнализировать пассажиру о том, что оно все еще здесь, с помощью вышеупомянутых способов.
[35] Слова, использованные в описании, являются скорее словами описания, чем ограничения, и понятно, что различные изменения могут быть выполнены без отступления от сущности и объема изобретения. Как ранее описано, признаки различных вариантов осуществления могут быть объединены, чтобы формировать дополнительные варианты осуществления изобретения, которые могут не быть явно описаны или иллюстрированы. В то время как различные варианты осуществления могли быть описаны как предоставляющие преимущества или являющиеся предпочтительными по сравнению с другими вариантами осуществления или реализациями уровня техники относительно одной или более желаемых характеристик, специалисты в области техники поймут, что один или более признаков или характеристик могут быть нарушены, чтобы добиваться желаемых общих атрибутов системы, которые зависят от конкретного применения и реализации. Эти атрибуты могут включать в себя, но не только, стоимость, прочность, срок службы, стоимость срока службы, конкурентоспособность, внешний вид, упаковку, размер, удобство эксплуатации, вес, технологичность, легкость сборки и т.д. По существу, варианты осуществления, описанные как менее желаемые, чем другие варианты осуществления или реализации уровня техники относительно одной или более характеристик, не находятся за рамками изобретения и могут быть желательны для конкретных прикладных задач.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Способ и устройство для обнаружения опасных ветровых условий
Способ, система и считываемые компьютером носители для идентификации устройства для приема оградительного столбика

