Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ОЧИСТКИ НАРУЖНОЙ СТОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к системам для автоматической очистки наружных поверхностей транспортного средства эффективным образом с использованием меньшего количества ресурсов, чем традиционные способы очистки.
Все транспортные средства со временем становятся грязными. В настоящее время есть системы, которые пытаются не допускать пыль и грязь на наружные стороны транспортного средства благодаря статическому заряду, но они не всегда успешны и действуют весьма неэффективно. Более того, традиционные способы очистки транспортных средств, такие как автомойки, используют большое количество воды и энергии, человеческого труда или того и другого. В дополнение, эти традиционные способы со временем часто приводят к абразивному износу крашеных или лакированных поверхностей транспортного средства и могут приводить к проблемам на участках возле накладок и антенн транспортного средства. Соответственно, есть потребность в системе для автоматической очистки наружной стороны транспортного средства некоторым образом, который использует меньшее количество ресурсов и энергии, чем традиционные подходы, и старается не вызывать повреждения никаких поверхностей или компонентов транспортного средства.
Предусмотрены системы и способы для автоматической очистки наружных поверхностей транспортного средства. Системы могут включать в себя моторизованный робот, чистящий элемент и камеру, все с возможностью обмена информацией связаны процессором. Процессор может принимать информацию САПР (системы автоматизированного проектирования, CAD) касательно формы и размера наружных поверхностей транспортного средства, которые должны очищаться, наряду с информацией касательно расположения моторизованного робота на транспортном средстве. Процессор затем может определять эффективную траекторию для передвижения моторизованного робота по всем поверхностям транспортного средства. По ходу своего передвижения, моторизованный робот может применять чистящий элемент для удаления грязи или других инородных веществ с поверхности транспортного средства. Камера может следить за поверхностью транспортного средства на или возле расположения робота и выявлять любые инородные объекты или другие препятствия, которые могли бы мешать передвижению робота, и уведомлять процессор о местоположении таких объектов. Альтернативные варианты осуществления могут включать в себя роботизированную руку, встроенную в базовую станцию, прикрепленную к транспортному средству, вместо моторизованного робота.
Согласно первому объекту настоящего изобретения создана система для очистки наружной стороны транспортного средства, содержащая:
моторизованный робот, выполненный с возможностью перемещения по наружным поверхностям транспортного средства;
чистящий элемент, прикрепленный к моторизованному роботу; и
контроллер, выполненный с возможностью приема по меньшей мере одного чертежа САПР наружных поверхностей транспортного средства и данных относительно расположения моторизованного робота, и определения, на основе принятых данных, куда следует перемещаться моторизованному роботу по наружным поверхностям транспортного средства.
Предпочтительно, моторизованный робот содержит материал, который обеспечивает моторизованному роботу возможность временного прилипания к наружным поверхностям транспортного средства.
Предпочтительно, материал является присоской или магнитом.
Предпочтительно, чистящий элемент является вращающейся щеткой.
Предпочтительно, чистящий элемент является скребком.
Предпочтительно, система дополнительно содержит пылесос, встроенный в моторизованный робот.
Предпочтительно, система дополнительно содержит выпуск для чистящей текучей среды, встроенный в моторизованный робот.
Предпочтительно, система дополнительно содержит камеру, прикрепленную к моторизованному роботу и выполненную с возможностью обозрения наружных поверхностей транспортного средства.
Предпочтительно, камера является камерой светового поля или стереоскопической камерой.
Предпочтительно, камера дополнительно выполнена с возможностью определения местоположения повреждения или инородных объектов, присутствующих на наружных поверхностях транспортного средства, и уведомления контроллера о таких местоположениях.
Предпочтительно, система дополнительно содержит привязь, соединяющую контроллер и моторизованный робот и обеспечивающую возможность обмена информацией между ними.
Предпочтительно, привязь дополнительно выполнена с возможностью проведения чистящей текучей среды из источника в моторизованный робот.
Согласно второму объекту изобретения создана система для очистки наружной стороны транспортного средства, содержащая:
роботизированную руку, встроенную в базовый блок, прикрепленный к транспортному средству;
чистящий элемент, присоединенный к роботизированной руке; и
контроллер, выполненный с возможностью приема по меньшей мере одного чертежа САПР наружных поверхностей транспортного средства и данных относительно расположения роботизированной руки и определения, на основании принятых данных, куда следует перемещаться роботизированной руке, чтобы обеспечивать чистящему элементу возможность очищать наружные поверхности транспортного средства.
Предпочтительно, чистящий элемент является вращающейся щеткой.
Предпочтительно, чистящий элемент является скребком.
Предпочтительно, система дополнительно содержит пылесос, встроенный в роботизированную руку.
Предпочтительно, система дополнительно содержит выпуск для чистящей текучей среды, встроенный в роботизированную руку.
Предпочтительно, базовый блок содержит резервуар для чистящей текучей среды для подачи чистящей текучей среды в роботизированную руку.
Предпочтительно, система дополнительно содержит камеру, присоединенную к роботизированной руке, и выполненную с возможностью обозрения наружных поверхностей транспортного средства.
Предпочтительно, камера дополнительно выполнена с возможностью выявления местоположения повреждения или инородных объектов, присутствующих на наружных поверхностях транспортного средства, и уведомления контроллера о таких местоположениях.
Эти и другие варианты осуществления, и различные перестановки и аспекты станут очевидными и полнее понятными из нижеследующего подробного описания и прилагаемых чертежей, которые излагают иллюстративные варианты осуществления, которые указывают различные способы, которыми могут использоваться принципы изобретения. На чертежах:
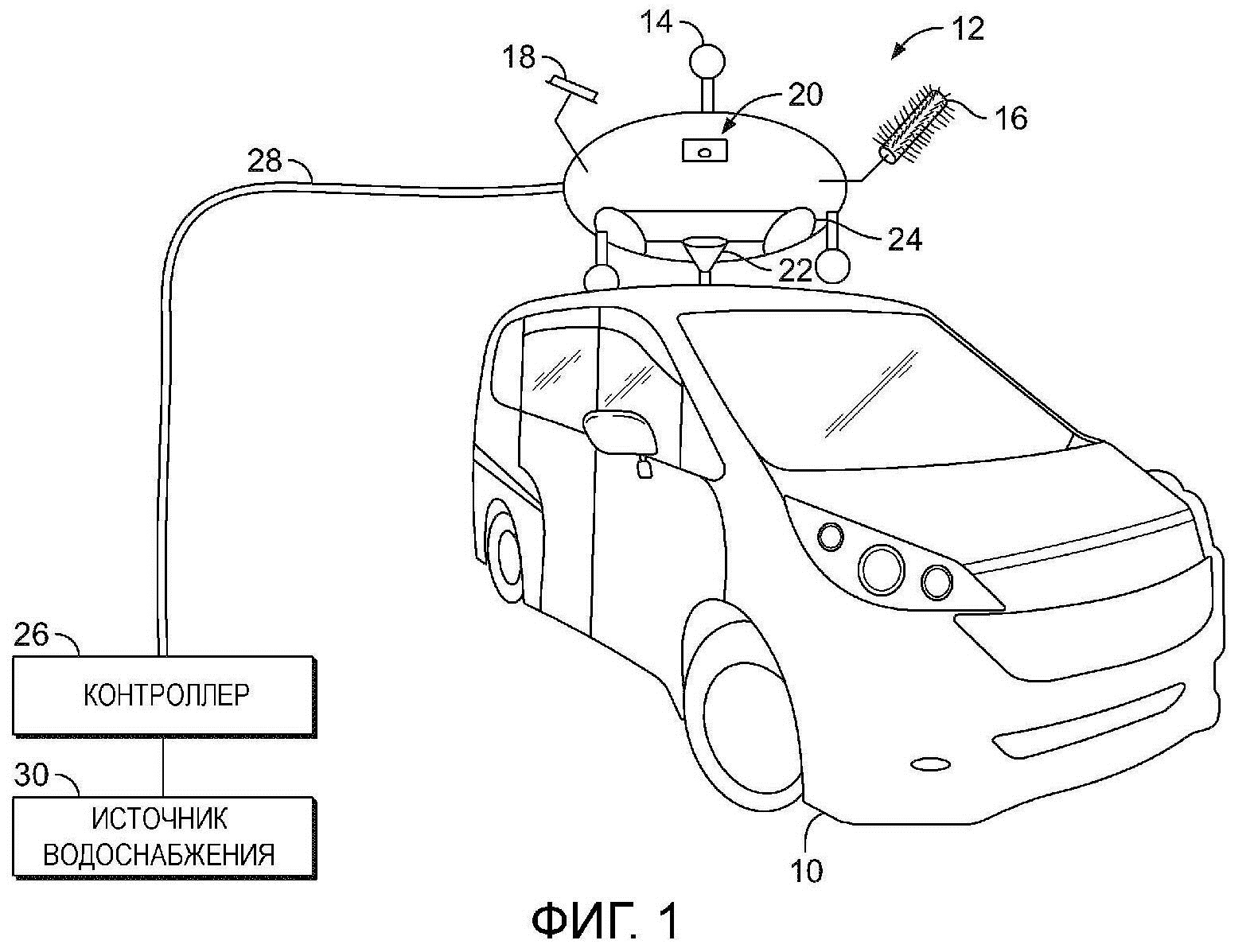
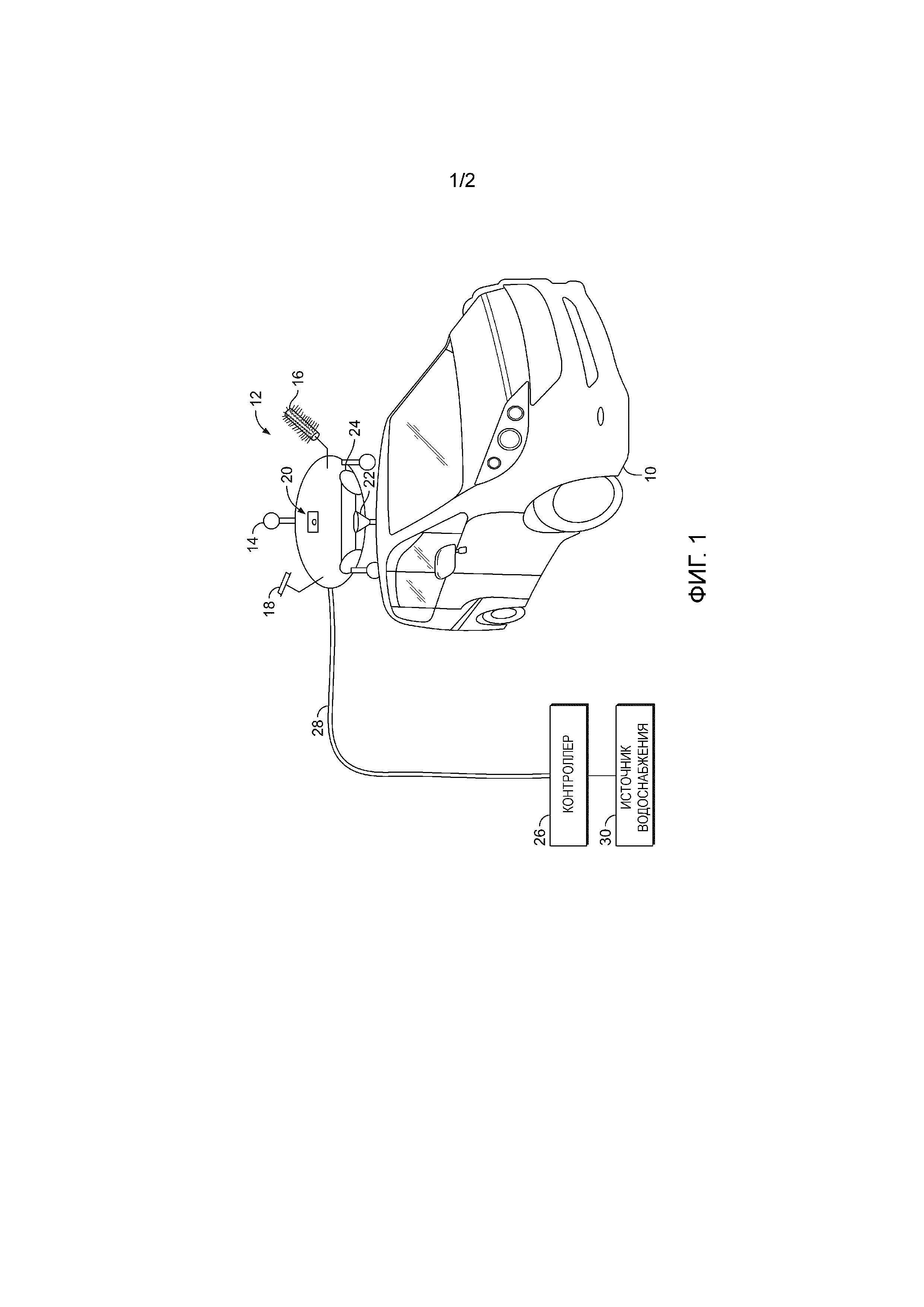
Фиг. 1 - схема, иллюстрирующая различные компоненты примерного варианта осуществления системы в соответствии с изобретением; и
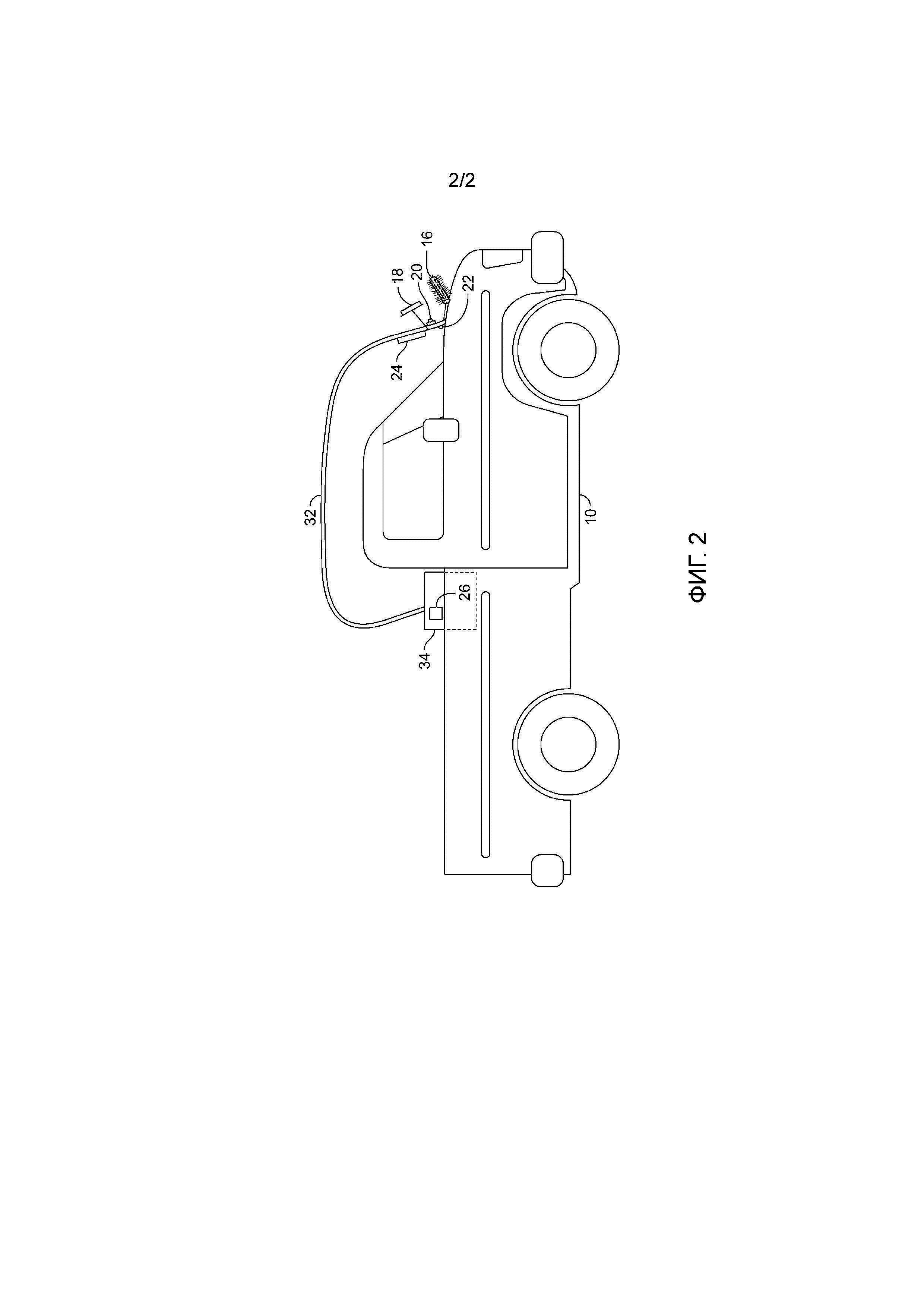
Фиг. 2 - схема, иллюстрирующая различные компоненты альтернативного варианта осуществления системы в соответствии с изобретением.
Описание, которое следует, описывает, иллюстрирует и приводит пример одного или более конкретных вариантов осуществления изобретения в соответствии с его принципами. Это описание предоставлено не для того, чтобы ограничивать изобретение вариантами осуществления, описанными в материалах настоящей заявки, но скорее для пояснения и обучения принципам изобретения таким образом, чтобы дать рядовому специалисту в данной области техники возможность понимать эти принципы и, с таким пониманием, быть способным применять их для осуществления на практике не только вариантов осуществления, описанных в материалах настоящей заявки, но также и других вариантов осуществления, которые могут приходить на ум в соответствии с этими принципами. Подразумевается, что объем изобретения должен покрывать все те варианты осуществления, которые могут подпадать под объем прилагаемой формулы изобретения, буквально или по теории эквивалентов.
Следует отметить, что в описании и на чертежах подобные или по существу сходные элементы могут быть помечены одинаковыми номерами ссылки. Однако, иногда эти элементы могут быть помечены отличающимися номерами, например, такими как в случаях, где такое присвоение меток способствует более ясному описанию. Дополнительно, чертежи, изложенные в материалах настоящей заявки, не обязательно начерчены в масштабе и, в некоторых случаях, пропорции могут быть преувеличены, чтобы яснее изображать некоторые признаки. Такие приемы присвоения меток и начертания не обязательно заключают в себе лежащее в основе реальное назначение. Как изложено выше, подразумевается, что описание изобретения должно восприниматься в целом и интерпретироваться в соответствии с принципами изобретения, как преподано в материалах настоящей заявки и понятно рядовому специалисту в данной области техники.
Фиг. 1 иллюстрирует компоненты системы примерного варианта осуществления в соответствии с изобретением. Показано транспортное средство 10, использующее систему варианта осуществления. Моторизованный робот 12, имеющий множество подвижных ножек 14, оборудован вращающейся щеткой 16, скребком 18, камерой 20, выпуском 22 для чистящей текучей среды и пылесосом 24. Подвижные ножки 14 оборудованы материалом или системой, которые дают им возможность временно прилипать к поверхностям транспортного средства и, таким образом, давать роботу 12 возможность быть способным передвигаться по всем наружным поверхностям транспортного средства. Например, подвижные ножки 14 могут быть оборудованы присосками или магнитами. В дополнение, также может применяться материал, который имитирует липкие подушечки на концах лапок геккона. Рядовые специалисты в данной области техники будут понимать, что есть много других типов адгезивных систем и материалов, которые могут применяться, не выходя из обладающего новизной объема настоящего изобретения.
Вращающаяся щетка 16 и/или скребок 18 могут приводиться в действие роботом 12 на поверхностях транспортного средства 10 по мере того, как робот 12 перемещается по ним, чтобы удалять грязь, пыль или другие инородные вещества, которые могут присутствовать. Эти чистящие элементы также могут использоваться поочередно по мере того, как система определяет, что робот 12 передвигается по разным типам поверхностей. Например, система может использовать скребок 18 для поверхностей ветрового стекла и окон, но применять вращающуюся щетку 16 для всех крашеных поверхностей. Рядовые специалисты в данной области техники будут понимать, что есть многообразие других чистящих элементов, которые могли бы применяться системой, не выходя из обладающего новизной объема настоящего изобретения. Например, вариант осуществления настоящего изобретения может применять скребок 18 наряду с нагревательным элементом или источником пара, чтобы растапливать или удалять снег, лед и/или изморозь с одной или более поверхностей транспортного средства. По мере того как робот 12 перемещается по всему транспортному средству 10, он также может распылять чистящую текучую среду для содействия чистящим элементам, через выпуск 22 для чистящей текучей среды. В этом примерном варианте осуществления, чистящей текучей средой является вода. Однако, могло бы использоваться многообразие других чистящих текучих сред, находящихся в ряду органических и неорганических растворителей, пара и даже воздуха.
Робот 12 также оборудован пылесосом 24. Пылесос 24 может использоваться для удаления всякой чистящей текучей среды с поверхности транспортного средства 10. Текучая среда может собираться в резервуаре внутри робота 12, где она может фильтроваться, а затем повторно использоваться роботом 12. Когда робот не используется, тогда фильтр может подвергаться обратной промывке системой, чтобы гарантировать, что робот 12 остается чистым для будущих применений.
В заключение, робот 12 имеет встроенную камеру 20. Камера 20 может быть небольшой камерой светового поля, или стереоскопической камерой, или любой другой камерой, способной воспринимать и измерять дальность. Камера 20 может использоваться для выявления наличия и местоположения непредвиденных или инородных объектов на поверхности транспортного средства 10. Камера 20 также может использоваться для выявления точного цвета или уровня чистоты поверхности транспортного средства и/или наличия каких бы то ни было поверхностных повреждения или коррозии, таких как ржавчина.
Моторизованный робот 12 по настоящему варианту осуществления присоединен с возможностью обмена информацией к контроллеру 26 с помощью привязи 28. Контроллер 26 и привязь 28 также присоединены к источнику 30 водоснабжения. Привязь 28 главным образом содержит провода для установления канала связи между контроллером 26 и роботом 12, и трубку или шланг, присоединяющий источник 30 водоснабжения к роботу 12. Дополнительно, контроллер 26 может быть встроен в сам робот 12 или поддерживать связь с роботом беспроводным образом.
Контроллер 26 выполнен с возможностью осуществлять доступ к и принимать информацию чертежей САПР касательно транспортного средства 10, так чтобы контроллер 26 мог определять точные размеры поверхностей транспортного средства, по которым необходимо передвигаться роботу 12. Контроллер 26 также принимает данные в реальном времени, указывающие расположение робота 12 на транспортном средстве 10. С использованием этих двух наборов данных, контроллер 26 определяет наиболее эффективную программу очистки, которой должен придерживаться робот 12, и дает команду роботу 12 выполнять такую программу. Элементы программы могут учитывать скорость, форму и угол перемещения робота 12 по всем поверхностям транспортного средства 10, где и когда следует приводить в действие различные чистящие элементы, такие как вращающаяся щетка 16 или скребок 18, когда распылять чистящую текучую среду, сколько распылять чистящей текучей среды, и когда вводить в действие пылесос 24. Рядовые специалисты в данной области техники будут понимать, что есть различные другие параметры, которые могли бы учитываться в программе очистки, не выходя из обладающего новизной объема настоящего изобретения.
Во время выполнения программы очистки транспортного средства, камера 20 контролирует поверхность транспортного средства 10 в и/или рядом с текущим расположением робота 12. В случае, если камера выявляет объект или другой вариант поверхности транспортного средства, который несовместим с размерами, изложенными в чертежах САПР транспортного средства 10, камера 20 предупреждает контроллер 26. В таком случае, контроллер 26 может надлежащим образом модифицировать программу очистки транспортного средства и соответственно давать команду роботу 12. Подобный протокол также может соблюдаться в случае, если камера 20 выявляет поверхностные коррозию или повреждение, или если цвет поверхности не такой, как ожидалось, таким образом, указывая, что может быть необходима дополнительная очистка роботом 12.
Фиг. 2 показывает альтернативный вариант осуществления настоящего изобретения. В этом варианте осуществления, базовый блок 34 прикреплен к или выполнен за одно целое с транспортным средством 10. Базовый блок 34 вмещает роботизированную руку 32, содержащую вращающуюся щетку 16, скребок 18, камеру 20, выпуск 22 для чистящей текучей среды и пылесос 24. Каждый из этих компонентов функционирует некоторым образом, по существу подобным соответствующим компонентам, описанным в варианте осуществления, изображенном на фиг. 1. Базовый блок 34 также вмещает резервуар для чистящей текучей среды и контроллер 26 на связи с роботизированной рукой 32.
Контроллер 26 выполнен с возможностью осуществлять доступ к и принимать информацию чертежей САПР касательно транспортного средства 10, так чтобы контроллер 26 мог определять точные размеры поверхностей транспортного средства, с которыми роботизированной руке 32 необходимо контактировать. Контроллер 26 также принимает данные в реальном времени, указывающие расположение роботизированной руки 32. С использованием этих двух наборов данных, контроллер 26 определяет наиболее эффективную программу очистки, которой должна придерживаться роботизированная рука 32, и дает команду роботизированной руке 32 выполнять такую программу. Элементы программы могут учитывать скорость, форму и угол перемещения роботизированной руки 32, где и когда следует приводить в действие различные чистящие элементы, такие как вращающаяся щетка 16 или скребок 18, когда распылять чистящую текучую среду, сколько распылять чистящей текучей среды, и когда вводить в действие пылесос 24. Рядовые специалисты в данной области техники будут понимать, что есть различные другие параметры, которые могли бы учитываться в программе очистки, не выходя из обладающего новизной объема настоящего изобретения.
Во время выполнения программы очистки транспортного средства, камера 20 контролирует поверхность транспортного средства 10 в и/или рядом с текущим расположением роботизированной руки 32. В случае, если камера выявляет объект или другой вариант поверхности транспортного средства, который несовместим с размерами, изложенными в чертежах САПР транспортного средства 10, камера 20 предупреждает контроллер 26. В таком случае, контроллер 26 может надлежащим образом модифицировать программу очистки транспортного средства и соответственно давать команду роботизированной руке 32. Подобный протокол также может соблюдаться в случае, если камера 20 выявляет поверхностные коррозию или повреждение, или если цвет поверхности не такой, как ожидалось, таким образом, указывая, что может быть необходима дополнительная очистка роботизированной рукой 32.
Следует понимать, что изобретение не должно ограничиваться никаким одиночным вариантом осуществления и должно трактоваться по широте и объему только в соответствии с изложением прилагаемой формулы изобретения.
Транспортное средство (варианты) и способ предупреждения о столкновении транспортного средства на основе времени до столкновения
Система хранения для транспортного средства, багажное отделение для транспортного средства и транспортное средство
Узел направляющей ремня безопасности, сиденье транспортного средства, узел ремня безопасности и транспортное средство (варианты)
Сигнальный беспилотный аппарат для автомобиля
Узел подлокотника транспортного средства и способ обеспечения опоры для поворачиваемого подлокотника в транспортном средстве
Кузов транспортного средства с пассажирской кабиной и система вытяжного вентилятора для кабины транспортного средства
Способ и система для защиты транспортного средства
Узел надувной подушки безопасности (варианты)
Активный буфер для автомобиля (варианты)
Осветительное устройство и система освещения для транспортного средства
Способ управления нагревательным устройством датчика твердых частиц (варианты), система и способ регенерации датчика твердых частиц
Способ формирования изолированного электрического проводника.
Управление генератором переменного тока с приводом переднерасположенных вспомогательных агрегатов
Генератор переменного тока с приводом фронтальных вспомогательных устройств
Система двунаправленного привода для системы двери и система двери моторного транспортного средства

