Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА
Вид РИД
Изобретение
Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ), и предназначено для управления и обработки сигналов ММГ.
Известна система управления гироскопа, описанная в изобретении под названием "Способ подстройки резонансной частоты подвеса подвижной массы микромеханического гироскопа по оси вторичных колебаний и микромеханический гироскоп" [патент РФ №2308682, МПК (2006.01) G01C 19/56, G01P 9/04, опубликовано 20.10.2007 г.], содержащая блок обработки сигналов.
Блок обработки сигналов содержит фазовый детектор, получающий входные сигналы от первого устройства выделения разности токов, прошедшего через фазосдвигающее устройство, и от второго устройства выделения разности токов, и фильтр низких частот, получающий входной сигнал с фазового детектора. Выходной сигнал фильтра низких частот является выходом ММГ. Блок обработки сигналов дополнительно содержит второй фазовый детектор, суммирующее устройство и интегратор, включенные между выходом второго устройства выделения разности токов и выводом дополнительного электрода.
Указанная система позволяет увеличить точность подстройки резонансной частоты подвеса подвижной массы микромеханического гироскопа по оси вторичных колебаний и повысить точность микромеханического гироскопа.
К недостаткам данной системы можно отнести:
- отсутствие подстройки резонансной частоты по оси первичных колебаний;
- необходимость использования прецизионных аналоговых электронных схем;
- необходимость проведения ручных процедур настройки и калибровки устройства.
Известна цифровая система управления вибрационного гироскопа [патент США №6276204, МПК7 G01P 9/04, опубликовано 21.08.2001 г.]. содержащая блок преобразования сигналов, состоящий из аналого-цифровых и цифро-аналоговых преобразователей и взаимодействующий с блоком обработки сигналов.
В цифровой системе управления вибрационного гироскопа предусмотрены средства дискретизации в выбранные интервалы времени выходных сигналов перед переходом в блок обработки сигналов, включающие генератор переменной частоты.
Для снижения погрешностей в известной системе осуществляется подстройка частоты обработки под резонансную частоту ЧЭ, с помощью управляемого генератора переменной частоты. Частота генератора регулируется в соответствии с резонансной частотой ЧЭ на основе сигналов, принимаемых цифровым процессором от сенсора первичных колебаний.
При схожем структурном построении данная система имеет ряд недостатков:
- нестабильность частоты первичных колебаний и, соответственно, частоты работы системы;
- отсутствие подстройки резонансной частоты вторичных колебаний для компенсации квадратурной ошибки.
Данное техническое решение рассматривается в качестве ближайшего аналога, как наиболее близкое к заявляемому изобретению.
Задачей, на решение которой направлено изобретение, является создание системы управления микромеханического гироскопа с высокой точностью и стабильностью микромеханического гироскопа, а также низким влиянием температуры.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении точности и стабильности микромеханического гироскопа со сниженным влиянием температур, за счет подстройки собственной частоты первичных колебаний ЧЭ и подстройки частоты вторичных колебаний для устранения квадратурной ошибки, а также в простоте реализации, настройки и калибровки системы и получении цифрового выходного сигнала за счет реализации схемы управления в цифровом виде.
Указанный технический результат достигается тем, что система управления микромеханического гироскопа содержит блок преобразования сигналов, состоящий из аналого-цифровых и цифро-аналоговых преобразователей и взаимодействующий с блоком обработки сигналов, согласно изобретению блок обработки сигналов выполнен в виде блока возбуждения и блока обработки вторичных колебаний, а блок преобразования сигналов оснащен усилителями выходных сигналов цифро-аналоговых преобразователей, получающих сигналы с блока возбуждения и блока обработки вторичных колебаний, и сумматорами, получающими аналоговые сигналы с усилителей выходных сигналов и блоков возбуждения и обработки вторичных колебаний.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию "новизна".
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения, на этом основании можно сделать вывод о соответствии заявляемого изобретения условию "изобретательский уровень".
Изобретение иллюстрируется чертежами.
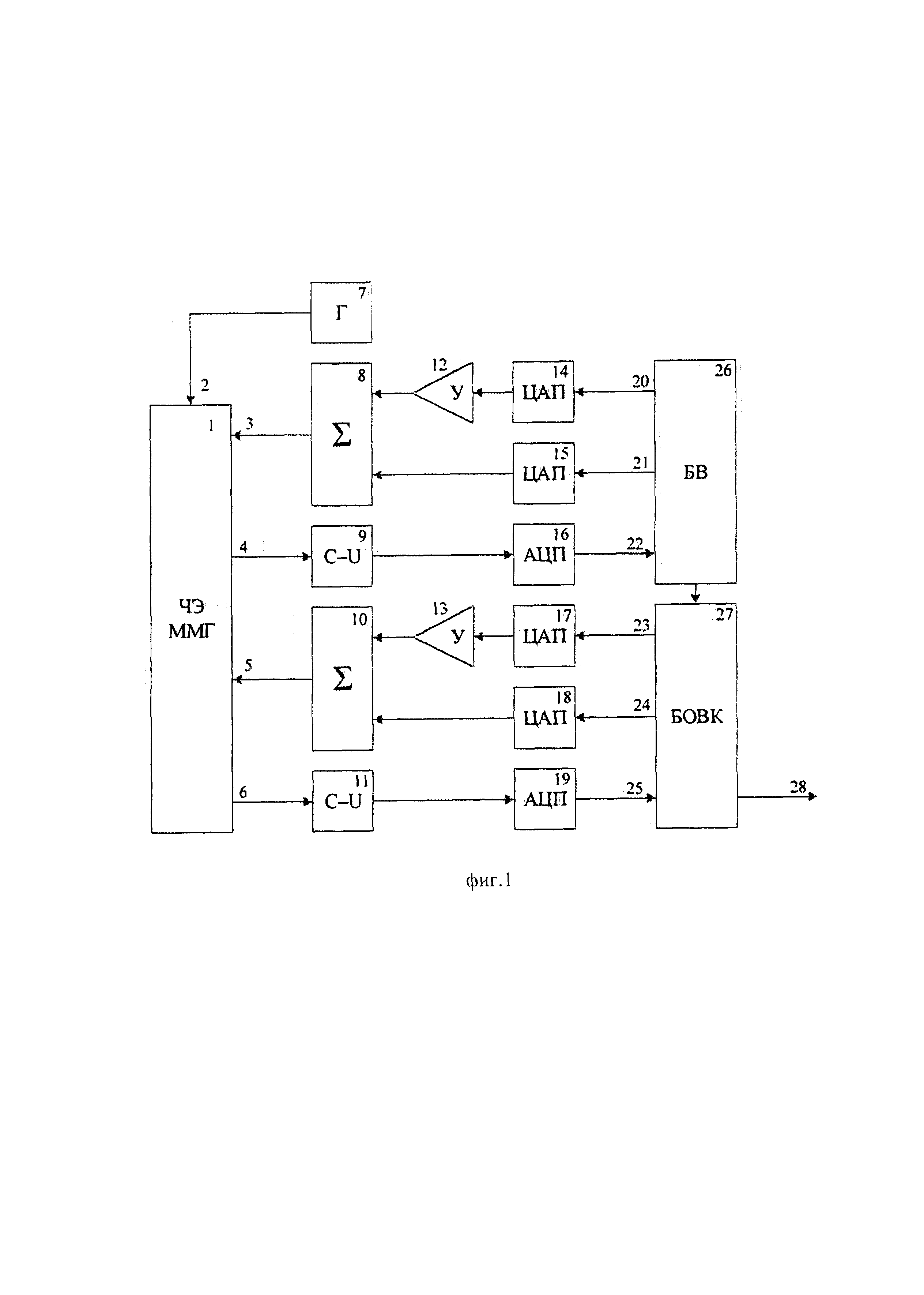
На фиг. 1 приведена структурная схема системы управления микромеханического гироскопа.
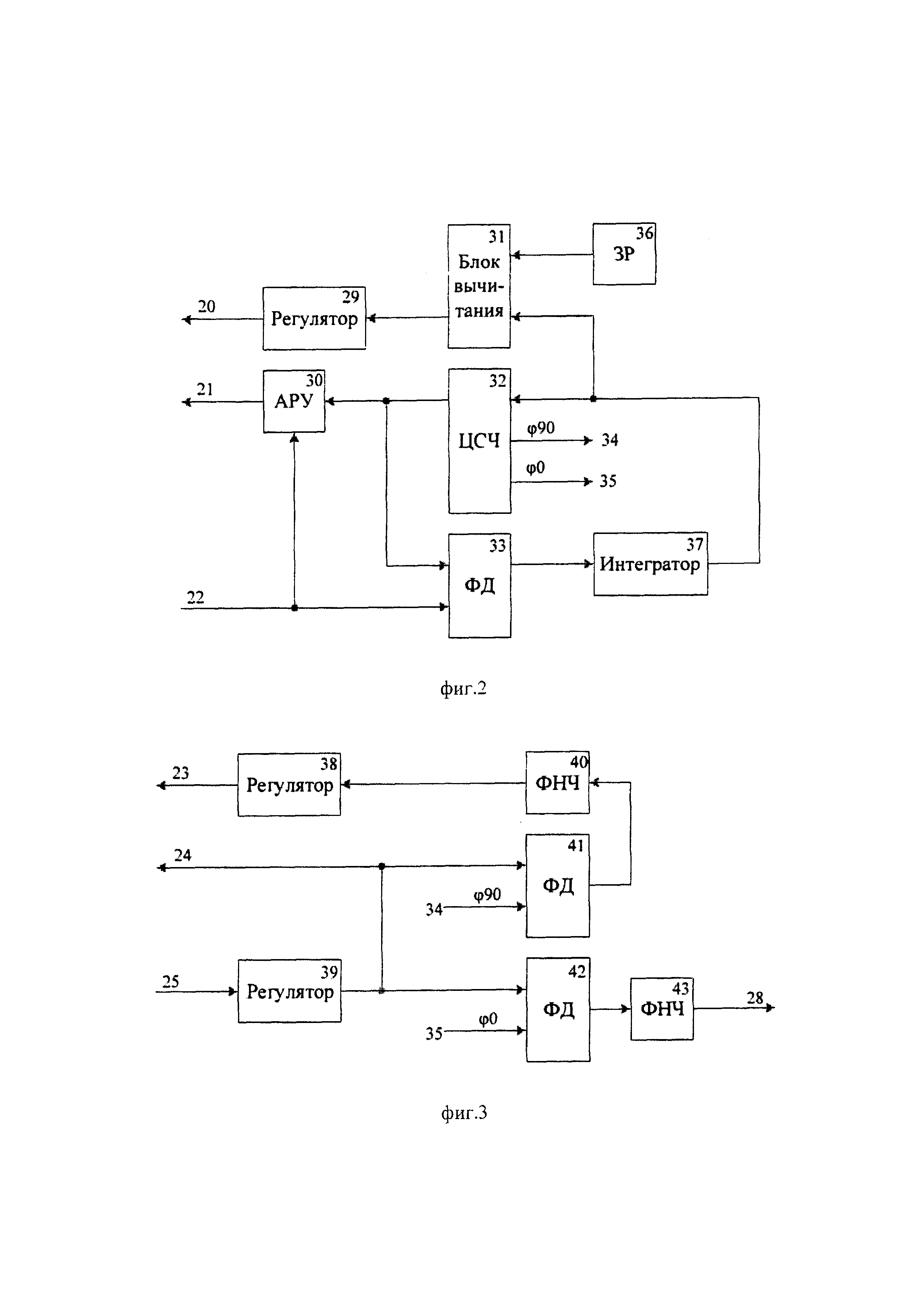
На фиг. 2 - блока возбуждения.
На фиг. 3 - блока обработки вторичных колебаний.
Система управления микромеханического гироскопа содержит блок преобразования и блок обработки сигналов, взаимодействующие с чувствительным элементом микромеханического гироскопа (ЧЭ ММГ) 1.
ЧЭ ММГ 1 включает в себя емкостные сенсоры первичных и вторичных колебаний с выходами 4 и 6 соответственно, электростатические микроприводы первичных и вторичных колебаний с входами 3 и 5 соответственно и ротор с входом 2, являющийся общим электродом для сенсоров и электрических микроприводов первичных и вторичных колебаний и получающий сигнал с генератора "накачки" заряда 7.
Блок преобразования сигналов состоит из преобразователей емкости в напряжение 9 и 11, взаимодействующих с аналого-цифровыми преобразователями (АЦП) 16 и 19 соответственно, цифро-аналоговых преобразователей (ЦАП) 14, 15, 17, 18, усилителей 12, 13, усиливающих выходные сигналы цифро-аналоговых преобразователей 14 и 17 соответственно, и сумматоров 8 и 10. Сумматоры 8 и 10 получают входные сигналы с усилителей 12, 13 и с цифро-аналоговых преобразователей 15 и 18 соответственно (фиг. 1).
Блок обработки сигналов выполнен в виде блока возбуждения 26 и блока обработки вторичных колебаний 27. Блок возбуждения 26 получает входной сигнал с АЦП 16 на вход 22 и подает выходные сигналы на ЦАП 14 и 15 с выходов 20 и 21 соответственно. Блок обработки вторичных колебаний 27 получает входной сигнал с АЦП 19 на вход 25 и подает выходные сигналы на ЦАП 17 и 18 с выходов 23 и 24 соответственно (фиг. 1).
Емкостной сенсор первичных колебаний, преобразователь емкости в напряжение 9, АЦП 16, блок возбуждения 26, ЦАП 14 и 15, усилитель 12, сумматор 8 и электростатический микропривод первичных колебаний образуют контур возбуждения первичных колебаний ММГ.
Емкостной сенсор вторичных колебаний, преобразователь емкости в напряжение 11, АЦП 19, блок обработки вторичных колебаний 27, ЦАП 17 и 18, усилитель 13, сумматор 10 и электростатический микропривод вторичных колебаний образуют контур обработки вторичных колебаний ММГ.
Блок возбуждения 26 (фиг. 2) содержит фазовый детектор 33, получающий сигнал с входа 22 и передающий сигнал на интегратор 37, соединенный с цифровым синтезатором частоты 32 и блоком вычитания 31, на второй вход которого поступает сигнал с выхода задающего регистра 36. Выходной сигнал цифрового синтезатора частоты 32 поступает на входы фазового детектора 33 и блока автоматической регулировки усиления 30, получающего второй входной сигнал с входа 22 блока возбуждения 26 и передающего выходной сигнал на выход 21 блока возбуждения 26. Цифровой синтезатор частоты 32 также формирует выходные сигналы детектирования 34 и 35, необходимые для детектирования полезной и квадратурной составляющих сигнала в блоке обработки вторичных колебаний 27. Выходной сигнал детектирования 34 соответствует сигналу с фазой 90°-ϕ90, а выходной сигнал детектирования 35 - сигналу с нулевой фазой - ϕ0. Выход блока вычитания 31 присоединен к входу регулятора 29, выходной сигнал с которого передается на выход 20 блока возбуждения 26. Цифровой синтезатор частоты 32, фазовый детектор 33 и интегратор 37 образуют контур фазовой автоподстройки частоты.
Блок обработки вторичных колебаний 27 (фиг. 3) содержит регулятор 39, получающий входной сигнал с входа 25 и выдающий выходной сигнал на входы фазовых детекторов 41, 42 и на выход 24 блока обработки вторичных колебаний 27. Выходные сигналы фазовых детекторов 41 и 42 поступают на входы фильтров нижних частот 40 и 43 соответственно. Выход фильтра нижних частот 40 взаимодействует с входом регулятора 38, выходной сигнал с которого поступает на выход 23 блока обработки вторичных колебаний 27. Выходной сигнал фильтра нижних частот 43 поступает на выход 28 системы управления микромеханического гироскопа.
Работает устройство следующим образом.
Частота обработки сигналов Fs блоков возбуждения 26 и обработки вторичных колебании 27 синхронна частоте АЦП 16, 19 и ЦАП 14, 15, 17, 18, а также синхронна частоте генератора "накачки" заряда 7. Частота обработки сигналов FS при этом много больше частоты собственных колебаний ЧЭ ММГ 1.
Для преобразования емкостей сенсоров первичных и вторичных колебаний ЧЭ ММГ 1, на вход 2 ротора ЧЭ ММГ 1 с генератора "накачки" заряда 7 подается прямоугольный сигнал заданной амплитуды и частоты.
При возникновении первичных колебаний ЧЭ ММГ 1 емкостной сенсор первичных колебаний подает сигнал на выход 4, который в преобразователе 9 преобразуется в напряжение, поступающее в АЦП 16. Затем сигнал с выхода АЦП 16 поступает на вход 22 блока возбуждения 26.
С входа 22 цифровой сигнал поступает в контур фазовой автоподстройки частоты, образованный фазовым детектором 33, интегратором 37 и цифровым синтезатором частоты 32, баланс наступает на частоте резонанса первичных колебаний ЧЭ ММГ 1, благодаря чему обеспечивается резонансное возбуждение первичных колебаний ЧЭ ММГ. Блок автоматической регулировки усиления 30 осуществляет изменение амплитуды сигнала возбуждения таким образом, чтобы амплитуда сигнала, фиксируемого на входе 22, оставалась постоянной. В режиме установившихся колебаний цифровой код на выходе интегратора 37 будет пропорционален частоте первичных колебаний ММГ в соответствии с формулой:
где FММГ1 - частота первичных колебаний ММГ,
FS - частота обработки сигналов.
n - разрядность внутреннего регистра синтезатора частоты.
Блок вычитания 31 обеспечивает вычитание из значения частоты колебаний Н значение, хранящееся в памяти задающего регистра 36. Выход блока вычитания 31 соединен с входом регулятора 29. который формирует сигнал подстройки частоты первичных колебаний. Сигнал подстройки частоты первичных колебаний с выхода 20 блока возбуждения 26 через ЦАП 14 и усилитель 12 совместно с сигналом с выхода 21 блока возбуждения 26, проходящим через ЦАП 15, сумматором 8 преобразуются в напряжение подставки на входе 3 электростатического микропривода первичных колебаний. Напряжение подставки благодаря эффекту отрицательной жесткости уменьшает собственную частоту первичных колебаний ММГ. Процесс подстройки устанавливается, когда сигнал на входе регулятора 29 становится равным нулю, т.е. значение, заданное в регистре 36, становится равным значению на выходе интегратора 37, которое в свою очередь пропорционально значению частоты первичных колебаний в соответствии с вышеприведенной формулой. Таким образом, изменяя значение кода в задающем регистре 36, можно изменять частоту первичных колебаний ЧЭ ММГ 1.
Для синхронизации частоты первичных колебаний ММГ с частотой обработки сигналов FS с целью точного детектирования сигналов, на половине периода первичных колебаний ММГ должно укладываться равное количество периодов сигнала синхронизации FS, но не менее двух. Тогда значения, задаваемые в регистре 36, должны соответствовать формуле:
где Npег - значение в задающем регистре 36, соответствующее условию синхронизации,
n - разрядность внутреннего регистра синтезатора частоты,
N - коэффициент кратности, показывающий сколько периодов тактовой частоты Fs укладывается на половине периода первичных колебаний ММГ. (N=2, 3, 4 …)
Задающий регистр 36 может быть реализован как набор заранее заданных значений в соответствии с формулой, а подбор значения в регистре 36 может осуществляться автоматически по значению на выходе регулятора 38.
Таким образом, в устройстве обеспечивается синхронная подстройка частоты первичных колебаний кратно частоте обработки сигналов. Благодаря этому достигается высокая точность детектирования и как следствие снижение уровня дрейфа гироскопа. Кроме того, использование стабильных источников частоты FS обеспечивает стабильность и низкую зависимость от температуры частоты первичных колебаний ММГ, что также повышает точность измерений.
При возникновении вторичных колебаний ЧЭ ММГ 1 емкостной сенсор вторичных колебаний подает сигнал на выход 6, который в преобразователе 11 преобразуется в напряжение, поступающее в АЦП 19. Затем сигнал с выхода АЦП 19 поступает на вход 25 блока обработки вторичных колебаний 27.
С входа 25 цифровой сигнал поступает на регулятор 39, образующий компенсационную обратную связь в контуре вторичных колебаний. На выходе регулятора 39 с помощью фазовых детекторов 41, 42 и формируемых цифровым синтезатором частот 32 вспомогательных входных сигналов ϕ90 (34) и ϕ0 (35) осуществляется детектирование квадратурной и полезной составляющих сигнала. Полезная составляющая через фильтр нижних частот 43 поступает на выход 28 и фиксируется в цифровом виде. Квадратурная составляющая через фильтр нижних частот 40 поступает на вход регулятора 38, который формирует сигнал подстройки частоты вторичных колебаний. Сигнал подстройки частоты вторичных колебаний с выхода 23 блока обработки вторичных колебаний 27 через ЦАП 17 и усилитель 13 совместно с сигналом с выхода 24 блока обработки вторичных колебаний 27, проходящим через ЦАП 18, сумматором 10 преобразуются в напряжение подставки на входе 5 электростатического микропривода вторичных колебаний. Напряжение подставки благодаря эффекту отрицательной жесткости уменьшает собственную частоту вторичных колебаний. Значение квадратурной составляющей зависит от степени рассогласования частот первичных и вторичных колебаний. Благодаря введенному контуру регулирования собственная частота вторичных колебаний точно подстраивается под частоту первичных колебаний, а квадратурная составляющая становится равной нулю.
Таким образом, в системе управления микромеханического гироскопа достигается согласование собственных частот первичных и вторичных колебаний с тактовой частотой работы схемы. За счет этого увеличивается точность детектирования сигналов, компенсируется квадратурная составляющая и как следствие уменьшается дрейф выходного сигнала и увеличивается точность преобразований.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство, воплощающее заявленное изобретение при его осуществлении, предназначено для управления и обработки сигналов ММГ;
- для заявленного устройства в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления;
- средство, воплощающее заявленное изобретение при осуществлении, способно обеспечить повышение точности и стабильности микромеханического гироскопа, а также низкое влияние температуры.
Следовательно, заявленное изобретение соответствует условию "промышленная применимость".
Система управления микромеханического гироскопа, содержащая блок преобразования сигналов, состоящий из аналого-цифровых и цифро-аналоговых преобразователей и взаимодействующий с блоком обработки сигналов, отличающаяся тем, что блок обработки сигналов выполнен в виде блока возбуждения и блока обработки вторичных колебаний, а блок преобразования сигналов оснащен усилителями выходных сигналов цифро-аналоговых преобразователей, получающих сигналы с блока возбуждения и блока обработки вторичных колебаний, и сумматорами, получающими аналоговые сигналы с усилителей выходных сигналов и блоков возбуждения и обработки вторичных колебаний.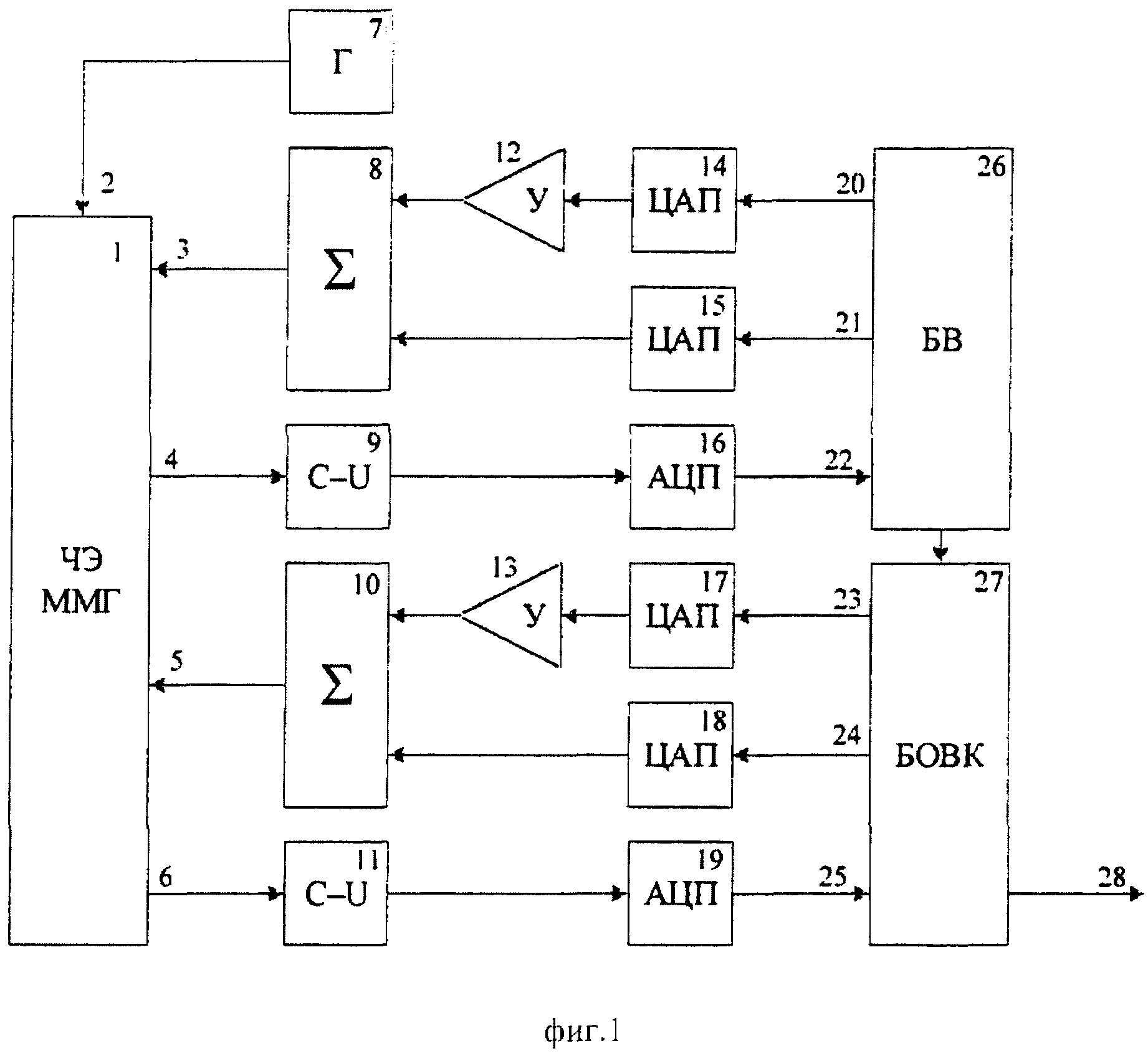
Система формирования облучения мишени и модуль фокусировки и наведения излучения на нее
Способ извлечения наполнителя из утилизируемого полимерного композита
Способ навигации летательных аппаратов
Устройство для измерения относительных деформаций и температуры
Устройство для получения изображения объекта, находящегося в радиационно-опасной зоне
Способ регистрации распределения интенсивности мягкого рентгеновского излучения
Генератор высоковольтных импульсов
Излучатель лазера
Способ имитации механического действия рентгеновского излучения на образцы ракетной техники
Фильтр нижних частот с гальванической развязкой
Способ лечения хронических травм слизистой оболочки рта
Способ лечения гингивита
Способ лечения хронической механической травмы слизистой оболочки рта у больных, страдающих сахарным диабетом инсулинозависимого типа

