Результат интеллектуальной деятельности: СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ВНУТРЕННЕГО МЕСТОПОЛОЖЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу, устройству и системе для определения внутреннего местоположения перемещающегося объекта.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Внутреннее позиционирование предоставляет возможность определения местоположения пользователей, например, внутри зданий. Таким образом, например, облегчаются адресная реклама, навигация, действия аварийно-спасательные служб, медицинский контроль и т.д.
Известны различные подходы, среди них радиочастотные (RF) методы, такие как
- RSSI - вычисления не на основе расстояния, которые также упоминаются как ʺвыявление характерных особенностейʺ (фингерпринтинг, ʺснятие отпечатков пальцевʺ):
Серия измерений указателя уровня принимаемого сигнала (RSSI) существующих RF платформ, например, Wi-Fi, Bluetooth и т.д. на месте, например, в здании, выполняется в конкретных местоположениях и сохраняется в базе данных, вместе с географической информацией, где каждое из этих измерений было выполнено, на этапе калибровки. Во время работы, устройство снова измеряет эти параметры и сравнивает их с сохраненными на месте. Затем, в зависимости от некоторой метрики, оно вычисляет свое местоположение. Этот способ требует обширной калибровки, чтобы установить серию измерений RSSI в паре с их географическим местоположением.
- RSSI - вычисления на основе расстояния: RSSI может быть использован, чтобы определить, какое примерно расстояние прошел сигнал, с использованием уравнений потерь на трассе распространения, причем соотношение между расстоянием и потерями сигнала может быть адаптировано к конкретным окружениям. Это аппроксимирует, какую мощность RF сигнал теряет вследствие пройденного расстояния, и с помощью этого можно выполнить геометрическую трилатерацию с использованием трех или более различных RF источников. В принципе, если местоположение передатчика известно заранее, нет необходимости выполнять калибровку.
- Время прихода сигнала (ТoА) -вычисления на основе расстояния: используя временные метки из пакетов, передаваемых между устройством и точкой доступа к сети, например, WLAN, можно определить пройденное расстояние с использованием известной скорости распространения для RF сигналов, т.е. скорости света. Затем, аналогично предыдущему методу, может выполняться геометрическая трилатерация. Как в предыдущем методе, если местоположение передатчика известно, калибровка не требуется.
Кроме того, известны методы не на основе RF, такие как:
- Формирование изображений и распознавание изображений: серия кадров местоположения снимается и сохраняется в базе данных вместе с географической информацией места, где был снят каждый из них, на этапе калибровки. Во время выполнения, новые кадры, снятые в местоположении, которое должно быть определено, сравниваются с сохраненными в базе данных, и находится лучшее совпадение. Этот метод может рассматриваться как визуальное выявление характерных особенностей и как таковой требует обширной калибровки перед использованием.
- Ультразвуковой метод - вычисления на основе расстояния: ультразвуковые волны могут быть использованы для обнаружения препятствий, в зависимости от времени, которое требуется, чтобы они отразились от упомянутых препятствий. Это время может затем использоваться, наряду со скоростью звука, чтобы вычислить расстояние до препятствия.
- Инерциальное позиционирование, также известное как ʺнавигационное счислениеʺ: Эти системы постоянно оценивают местоположение объекта на основе известной начальной позиции и серии отсчетов в реальном времени от инерциальных датчиков, таких как акселерометры, гироскопы и магнитометры.
Задачей изобретения является предоставить возможность эффективно определять местоположение перемещающихся объектов во внутренних средах.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Указанная задача решается тем, что раскрыто в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления являются предметом зависимых пунктов формулы изобретения.
Изобретение относится к способу, в котором внутреннее местоположение перемещающегося объекта получают путем объединения первых и по меньшей мере вторых данных местоположения. Первые или вторые данные местоположения вытекает из первого или второго способа определения местоположения, соответственно.
Таким образом, путем объединения данных из двух различных способов обеспечивается повышение точности.
Определение местоположения также упоминается как позиционирование или локализация. Внутреннее местоположение означает, в частности, местоположение в закрытых окружениях, например, внутри зданий, других помещений или под землей. Более обобщенно, оно обозначает местоположения, где никакой GPS сигнал или аналогичный сигнал не доступен; однако существуют ограничения пространства, в котором находится перемещающийся объект.
В соответствии с предпочтительным вариантом осуществления, первый способ определения местоположения калибруется и является точным в течение первого периода времени после калибровки.
В соответствии с другим предпочтительным вариантом осуществления, вторые данные о местоположении вытекают из второго способа определения местоположения, который является очень точным на кратковременной основе, но требует частой калибровки. В частности, он является стабильным только в течение второго периода времени.
В соответствии с другим вариантом осуществления, точная продолжительность периода времени, может также зависеть от скорости перемещающегося объекта. В частности, второй период времени может быть короче, чем первый период времени.
В соответствии с предпочтительным вариантом осуществления, выполняется объединение двух способов определения местоположения, один из которых является точным и требует единовременных значительных усилий калибровки вследствие перемещения в окружающей среде, например, позиционирование на основе сигналов Bluetooth, с другим, который требует постоянной калибровки, обеспечивающей его высокую точность на короткое время, но является неточным в долгосрочном периоде. Благодаря этому, преимущества одной системы используются для компенсации недостатков другой. Кроме того, первый способ позиционирования, например позиционирование на основе сигналов Bluetooth, используется для постоянной повторной калибровки другой системы. Таким образом, не требуется никакой ручной калибровки другой системы, например, на основе данных акселерометра, гироскопа и магнитного датчика, обеспечивающих, например, данные в отношении подсчета шагов и/или ориентации.
В частности, по меньшей мере один дополнительный способ определения местоположения, предоставляющий дополнительные данные местоположения, используется для получения местоположения перемещающегося объекта. Это дополнительно повышает точность обнаружения местоположения.
Кроме того, изобретение относится к соответствующему устройству для определения внутреннего местоположения. Устройство содержит интерфейсы для приема соответствующих данных позиционирования и/или переноса данных на вычислительное устройство SE. В частности, это может быть внутренний интерфейс в устройстве. В качестве альтернативы или дополнительно, с помощью последнего интерфейса, данные могут быть перенесены на внешнее вычислительное устройство, например, сервер SE, доступный через сеть.
В частности, устройство может представлять собой портативный компьютер, имеющий соответствующие датчики и интерфейсы, на котором может запускаться компьютерная программа для выполнения способа позиционирования, который объединяет измерение местоположения из различных способов позиционирования.
Кроме того, изобретение относится к системе, содержащей соответствующее устройство и по меньшей мере один радиомаяк, в которой может быть осуществлен способ.
Настоящее изобретение также относится к компьютерной программе и носителю данных для хранения упомянутой компьютерной программы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие варианты осуществления, признаки и преимущества настоящего изобретения станут очевидными из последующего описания и зависимых пунктов формулы изобретения в сочетании с прилагаемыми чертежами, на которых показано следующее:
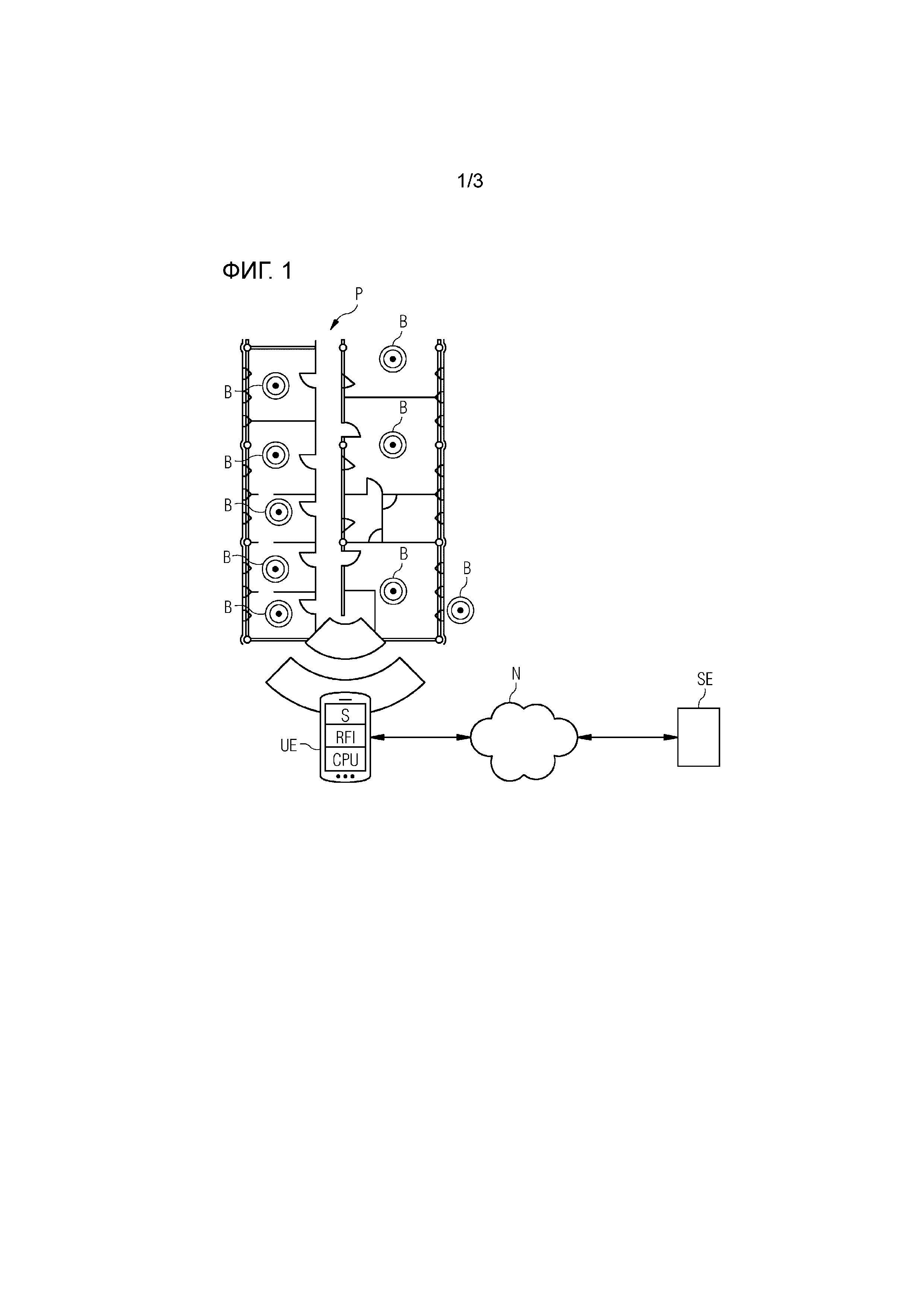
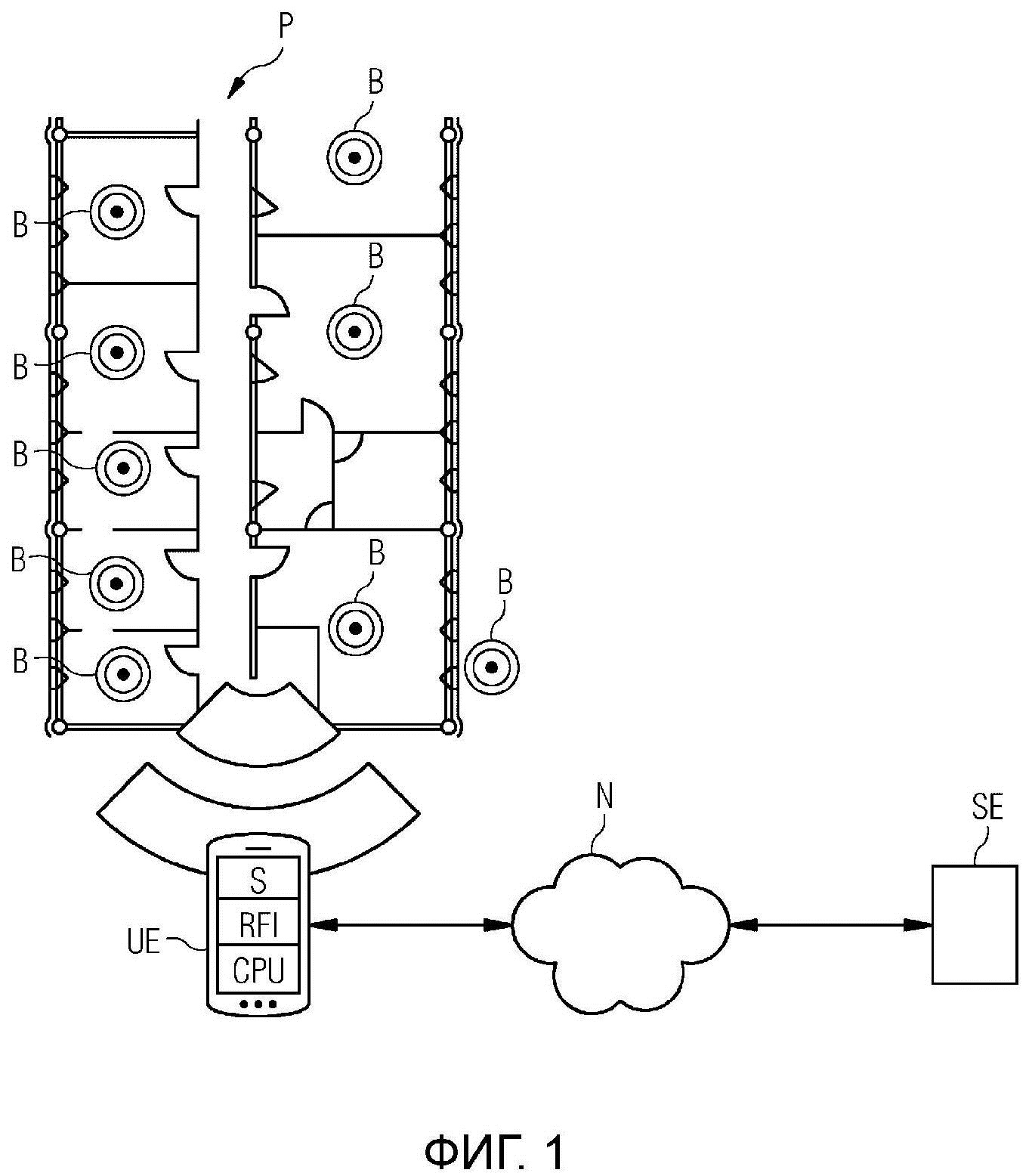
Фиг. 1 - примерный вариант осуществления системы, содержащей устройство для осуществления способа определения местоположения и радиомаяки.
Фиг. 2 - примерный вариант осуществления манипулирования данными и обработки.
Фиг. 3 - схематичный принцип многочастичного фильтра, используемого для формирования данных, полученных с помощью измерений.
В варианте осуществления архитектуры системы, показанной на фиг. 1, ряд маяков В Bluetooth с низким энергопотреблением (BLE) расположены в выбранных местоположениях во внутренней среде, например, внутри помещений, как показано на плане этажа.
Предпочтительным образом, они расположены в центральных местоположениях, таких как местоположение, где монтируется лампа. Альтернативно или дополнительно, они монтируются в местоположении, где уже имеется необходимая инфраструктура, такая как источник питания.
Как их местоположения, так и соответствующие уникальные идентификаторы, такие как адреса управления доступом к среде (MAC), сохраняются. Предпочтительным образом, они сохраняются в базе данных и связаны друг с другом, например, с учетом местоположения, расстояния и т.д. Точное местонахождение этих маяков B, а также топология соответствующего этажа или план этажа местоположения, например, помещения P, изображенные на фиг. 1, известны. Если они известны, то никакая калибровка для первого способа обнаружения местоположения не требуется. В качестве альтернативы, в соответствии с другим вариантом осуществления, калибровка может быть выполнена.
Каждый маяк B широковещательно передает отдельный MAC-адрес, ассоциированный с его местоположением. Альтернативно или дополнительно, они отправляют другую информацию, которая может быть уникальной для каждого устройства, и, таким образом, также может быть использована для целей идентификации.
Однако RF передачи страдают от ряда эффектов, которые дополнительно усугубляются во внутренних средах. Одним из таких эффектов является многолучевое распространение, которое обусловлено тем, что RF сигналы отражаются от препятствий и приходят в место назначения с разных направлений; это, в свою очередь, производит эффекты, такие как конструктивная или деструктивная интерференция, т.е. сигнал усиливается или ослабляется вследствие этих отражений и фазового сдвига, то есть сигналов, приходящих в противофазе по отношению к сигналу прямого распространения. Эти эффекты могут вызвать всплески в уровне сигнала, и поэтому местоположения определяются ошибочно, когда они основаны только на RF измерениях, т.е. при использовании только маяков для определения местоположения.
В общем, уровень сигнала очень легко получить на любой аппаратной платформе, но в то же время он очень нестабилен.
Таким образом, для получения местоположения перемещающегося объекта, данные о местоположении, полученные с использованием второго способа позиционирования, используются в комбинации с этими первыми данными местоположения, основанными на RF измерениях, например, BLE сигналами. Таким образом, вводится механизм для стабилизации этих скачкообразно изменяющихся местоположений, полученных из BLE сигналов. Местоположение скачкообразно изменяется вследствие нестабильности уровня сигнала, и эта нестабильность обусловлена отражениями, преломлением, дифракцией и поглощением радиоволн, которые свойственны ситуации многолучевого распространения. Также, сообщенное местоположение будет скачкообразно изменяться при изменении способа удерживания устройства, как, например, когда рука пользователя может частично блокировать антенну.
Посредством второго способа позиционирования, осуществляется сбор данных траектории человека при прохождении по помещению Р.
В соответствии с вариантом осуществления, это достигается с помощью мобильного приложения, которое обнаруживает физическую активность пользователя, посредством использования блока инерциального измерения (IMU), встроенного в мобильное устройство, которое обычно измеряет ускорение линейного перемещения (3D акселерометр), ускорение поворота (3D гироскоп), и магнитное поле (3D магнитометр). Эти данные IMU могут быть использованы для определения подсчета шагов, обнаружения активности или для измерения пройденного расстояния. Это мобильное приложение выполняется, по меньшей мере частично, на устройстве мобильной связи UE, например смартфоне. Для мониторинга этих объектов, устройство, например, смартфон, в частности, может содержать встроенные датчики S, такие как акселерометр, магнитометр, барометр, гироскоп, световые или/и аудио датчики. Их выходные данные считываются и обрабатываются для выработки подсчета шагов в реальном времени или пройденного расстояния и профиля перемещения пользователя.
Кроме того, устройство связи UE может содержать RF интерфейсы RFI для обмена данными посредством стандартов Bluetooth с низким энергопотреблением (BLE), Wi-Fi или мобильной связи.
Блок обработки CPU мобильного устройства выполнен таким образом, что могут быть использованы алгоритмы для обработки данных, в частности, такие как калмановская фильтрация, фильтрация со скользящим средним, фильтрация сглаживания, интеграция датчиков, алгоритмы распознавания активности.
Мобильное устройство может осуществлять связь через сеть N, например, Интернет или другую глобальную сеть (WAN) с сервером SE обработки данных D, таких как отображаемые карты, и выполняет логические операции, такие как поиск данных, требования к защите конфиденциальности.
Разделение того, где собираются данные, и где производятся вычисления, может быть выполнено таким образом. Например, сбор данных выполняется мобильным устройством UE, а вычисления выполняются на сервере SE, имеющем гораздо более высокую вычислительную мощность. Это, в частности, полезно, если сложные алгоритмы используются для определения местоположения, например, как многочастичная фильтрация.
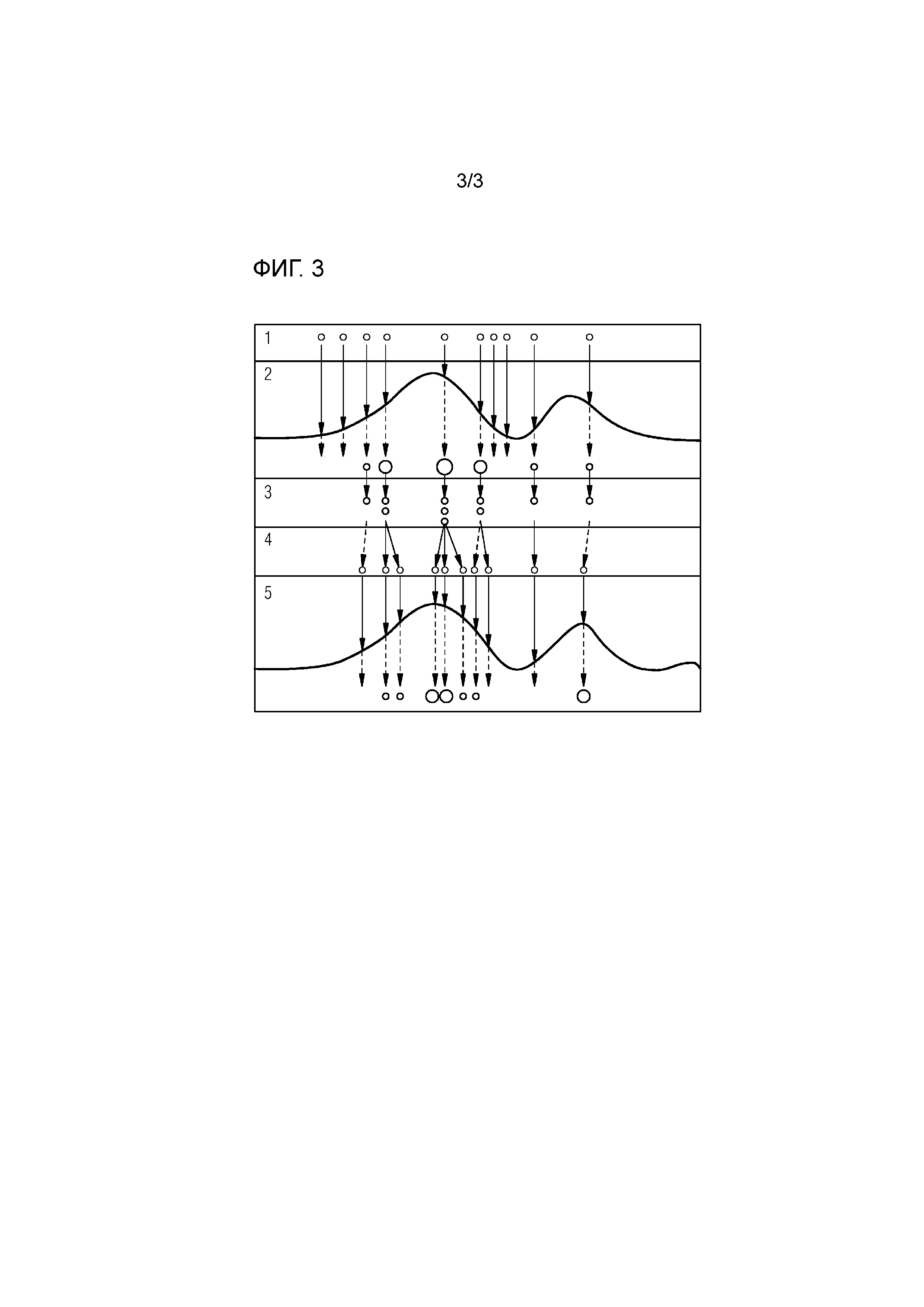
Еще один вариант осуществления использует ʺмногочастичный фильтрʺ для того, чтобы оценить реальное значение скрытой переменной с использованием измерений, полученных от доступной переменной; это называется скрытой марковской моделью. В приведенных выше вариантах осуществления, скрытая переменная будет реальным местоположением, в то время как доступная переменная является зашумленными измерениями, полученными от датчиков и Bluetooth геотегинга (привязки географических координат к фотоснимкам). Алгоритм многочастичного фильтра содержит следующую концепцию обработки данных, как можно видеть на фиг. 3.
Для выборки ʺчастицʺ, т.е. наборов данных, полученных на этапе 1 из явления, для каждого поднабора частиц, на этапе 2 вычисляется вес значимости. Более высокая вероятность того, что набор данных является корректным, приводит к более высокому присвоенному весу. Затем на этапе 3 выполняется повторная дискретизация в соответствии с весами, после чего, на этапе 4 выборки перемещаются в соответствии с распределением. На этапе 5 выполняется выбор в соответствии с весами значимости. Другими словами, многочастичный фильтр генерирует оцененное распределение вероятностей из доступных данных измерений и затем вырабатывает значительное количество ʺчастицʺ из этого распределения, которые случайным образом смещены. Затем частицы с наибольшей статистической значимостью сохраняются.
Так как многочастичная фильтрация требуют значительного объема вычислительной мощности, она предпочтительно используется в устройствах с высокой вычислительной мощностью, таким образом, все вычисления выполняются встроенными средствами.
В качестве альтернативы, может применяться онлайн обработка. В этом случае, данные собираются на мобильном устройстве UE, например телефоне, и выгружаются на удаленный сервер SE, где выполняется обработка, см. фиг. 2.
В соответствии с другим вариантом осуществления, для того, чтобы обеспечить эффективное использование объединения данных из двух различных способов позиционирования, используются так называемые ʺалгоритмы интеграции датчиковʺ. При использовании алгоритмов интеграции датчиков, эти источники информации могут быть использованы, чтобы точно указывать местоположение пользователя внутри помещения с точностью, которая, в частности, обеспечивается предусмотренной BLE географической привязкой фотоснимков и надежностью, которая, в частности, обеспечивается распознаванием активности: BLE географическая привязка фотоснимков уже обеспечивает точность на уровне помещения, т.е. существование в определенной комнате может быть подтверждено или отклонено. Дополнительно применяемое распознавание активности помогает уменьшить эффекты RF распространения, поясненные выше, и, следовательно, повысить надежность.
Согласно другому варианту осуществления, для того, чтобы интегрировать информацию датчиков, как указано выше, используется калмановский фильтр. Калмановский фильтр использует серию зашумленных измерений, полученных во времени, чтобы оценить неизвестную переменную более точно. Для моделирования этого варианта осуществления, модель физического линейного движения используется для предсказания состояние системы в следующий момент времени, используя данные распознавания активности для обновления положения географической привязки фотоснимков. После того, как состояние предсказано, калмановский фильтр затем продолжает его коррекцию с использованием нового измерения. Калмановский фильтр хорошо подходит для настройки защиты конфиденциальности, где все вычисления выполняются на мобильном устройстве UE, например, смартфоне.
Распознавание активности на основе краткосрочного навигационного счисления может обеспечивать довольно точную эволюцию местоположения в реальном времени.
Однако все эти инерциальные источники информации испытывают внутренне присущий дрейф, и поскольку они продолжают быть интегрированными с течением времени, без внешней калибровки, оценки местоположения также дрейфуют в сторону от фактического местоположения. Если только не очень точные датчики движения используются для измерения движения, которые могут быть довольно дорогостоящими, необходимо многократно выполнять калибровку.
Одним важным аспектом различных вариантов осуществления изобретения является сокращение калибровки и, таким образом, усилий по установке во внутренних системах позиционирования, а также обеспечение точности более высокой, чем на уровне помещений. Современное состояние техники предложений позиционирования внутри помещений, как правило, опирается на экстенсивные и инвазивные усилия калибровки, которые влекут за собой значительное время для выполнения и, вполне возможно, прерывание регулярных операций на месте. Поэтому одна из целей состоит в том, чтобы исключить или свести к минимуму необходимость в калибровке. Калибровка часто представляет самую высокую составляющую затрат в системе определения местоположения, и качество калибровки будет в значительной степени определять ее производительность.
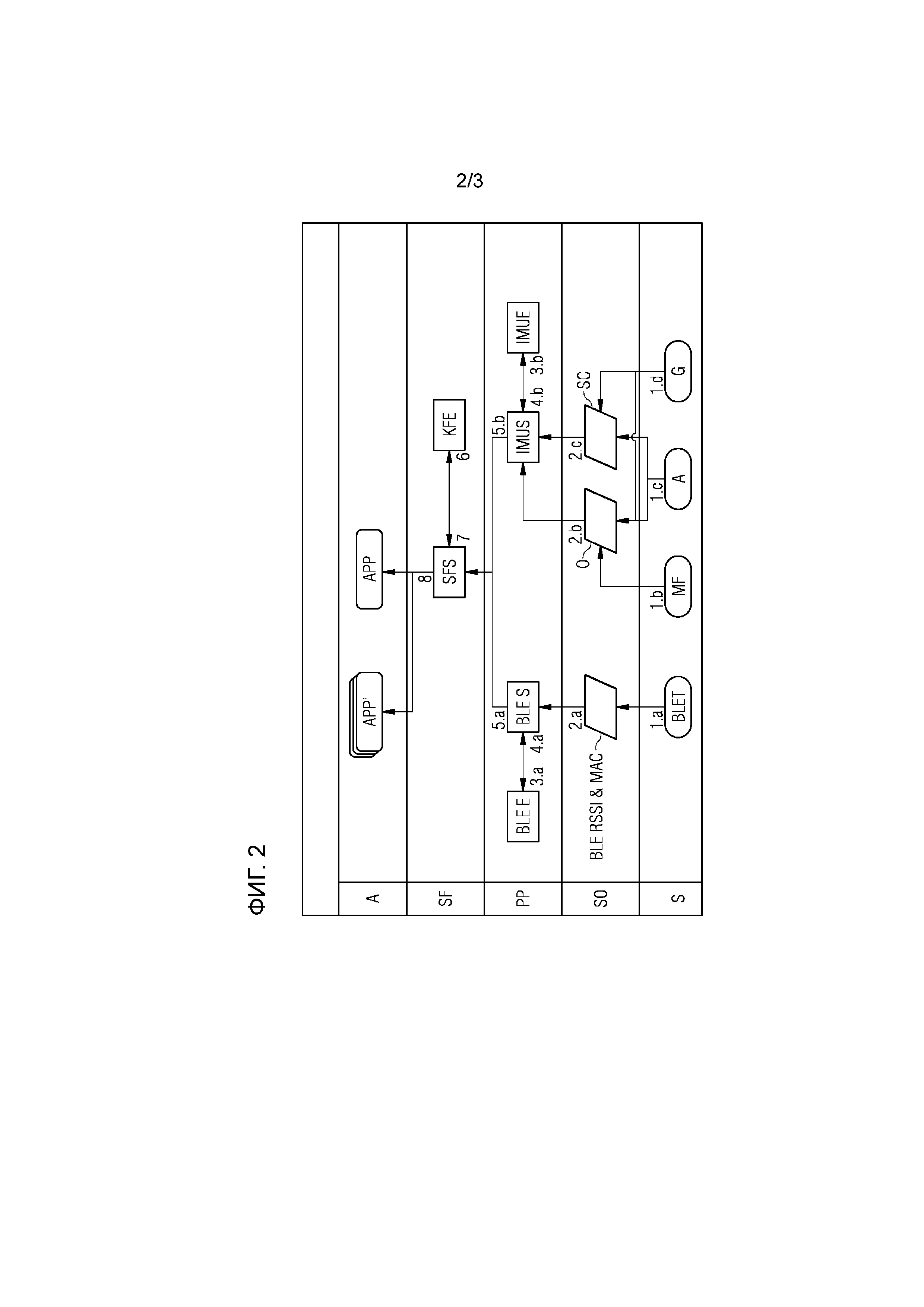
На фиг. 2 показан пример варианта осуществления манипулирования и обработки данных с использованием приложения, в частности, приложения Android, выполняемого на мобильном устройстве. Датчики S, такие как BLE приемопередатчик BLET, датчик магнитного поля MF, акселерометр A или гироскоп G обеспечивают на соответствующих этапах 1.а-1.d выходные данные SO датчиков.
Выходные данные SO включают в себя RSSI Bluetooth с низким энергопотреблением и/или MAC-данные BLERSSI&MAC и/или другую информацию, такую как UUDI (универсальный уникальный идентификатор) или/и главные и/или второстепенные данные от BLE приемопередатчика BLET в качестве данных из первого способа определения местоположения. Дополнительно, выходные данные содержат данные ориентации О от датчика магнитного поля MF и акселерометра A и гироскопа G и данные подсчета шагов SC от гироскопа G и акселерометра в качестве данных из второго способа определения местоположения.
В качестве альтернативы, не все эти данные используют или получают от всех показанных датчиков, а могут использоваться различные комбинации датчиков.
Эти выходные данные SO на этапах 2.а-2.c предоставляются соответствующим сервисам, используемым для связи, см. этапы 3.a, 3.b и 4.а, 4.b, с соответствующими механизмами обработки, BLE процессор BLEE и процессор блока инерциального измерения (IMU) (IMUE), для предварительной обработки РР. В примере на фиг. 2 доступные сервисы Android используется для обмена данных с механизмами обработки, BLE сервисом BLES и IMU сервисом IMUS.
В варианте осуществления согласно фиг. 2, интеграция датчиков SF выполняется путем предоставления данных на этапах 5.а и 5b в сервис интеграции датчиков, SFS, в частности, обеспечиваемый операционной системой мобильного устройства UE, в частности, Android, где данные передаются на этапе 6 на процессор калмановского фильтра KFЕ, и обработанные данные на этапе 7 переносятся обратно в сервис интеграции датчиков, SFS, используемый для обмена с процессором калмановского фильтра KFЕ.
На этапе 8, таким образом, преобразованные данные предоставляются в программу А, выполняемую на мобильном устройстве UE.
Преимуществами описанных вариантов осуществления являются возможность использования стандартных готовых к использованию аппаратных средств, таких как стандартные смартфоны и планшеты, работающие на операционной системе Android, и которые поддерживают Bluetooth с низким энергопотреблением (BLE). Это открывает широкий спектр возможных пользователей, так как пользовательский интерфейс может быть установлен на большее количество устройств, чем в случае, если бы требовались специальные аппаратные средства.
Еще одним важным преимуществом является простота в использовании, поскольку нет никакой необходимости в калибровке пользователем, и интерфейс может быть разработан подобно тому, как в уже существующих аналогичных службах позиционирования.
Кроме того, может быть достигнута высокая точность. Исходная система BLE географической привязки фотоснимков имеет заявленную точность около 1,4 м, точность обнаружения шага выше примерно 95% из обнаруженных шагов, и измерение ориентации имеет дисперсию ниже, чем 1%. Таким образом, сочетание этих систем должно обеспечивать общую точность выше, чем в ранее существующих системах.
Кроме того, надежность может быть увеличена за счет использования обоих источников информации. Таким образом, можно будет однозначно определить местонахождение, не сомневаясь, где пользователь находится в данный момент.
Кроме того, в отличие от других систем, предложенные варианты вообще не требуют калибровок в полевых условиях. Другие системы могут потребовать экстенсивного фингерпринтинга (выявления характерных особенностей) или записи участка местоположения, что может занять несколько часов и дней в зависимости от размера участка, поэтому вполне возможным является прерывание повседневных операций, если это не сделано должным образом.
Компьютерная программа или часть программного обеспечения для использования на компьютере, в частности мобильном компьютере, особенно смартфоне, инициирует сбор информации, такой как отыскиваемые BLE теги (метки) и физическая активность, путем активации соответствующих интерфейсов компьютера. Таким образом, пользователю нужно только, например, запустить приложение на смартфоне без необходимости предоставления какого-либо дополнительного активного ввода от пользователя.
- В теории, BLE теги обеспечивают точность на уровне помещения, ввиду их низкой мощности передачи. Диапазон каждого BLE тега несколько ограничен до помещения, в котором он расположен. Это связано с тем, что переход в другое помещение с другим тегом будет вызывать то, что последний будет рассматриваться как ближайший. Однако, на практике, эффект многолучевого распространения, поясненный выше, препятствует этому, что означает, что отражения сигнала делают весьма затруднительным точное определение местоположения пользователя.
Обнаружение активности дополнительно позволяет осуществлять определение истинного положения или ʺстабилизацию определения местоположенияʺ. Знание того, куда пользователь направляется и откуда он пришел, ввиду его активности и, возможно, представления модели плана этажа, например, чтобы знать, где находятся двери и стены, позволят исключать вычислительно возможных, но ложных кандидатов местоположения пользователя или ʺпаразитных определений местоположенияʺ (которые, например, перемещают местоположение пользователей через стену). С другой стороны, если пользователь не перемещается, т.е. это обнаруживается посредством распознавания активности с использованием акселерометра, даже если позиция, вычисленная через Bluetooth, будет показывать некоторое перемещение, комбинация с датчиком ускорения может предоставить статическое положение.
Кроме того, нет необходимости проводить инвазивный анализ на нужном месте. В решениях, соответствующих предшествующему уровню техники, требуется выполнять исследования формирования изображений или RF-фингерпринтинг, которые являются одновременно инвазивными и затратными по времени процедурами, которые могут вызывать перерывы в повседневных операциях. Кроме того, формирование изображения и фингерпринтинг требуют направления технического персонала на участок местоположения и выполнения обширных измерений с различной степенью детализации, что может занять много времени и вызвать большие неудобства. Предложенные варианты осуществления обеспечивают возможность развертывания тегов за время порядка от минут до часов, в зависимости от плана этажа, с минимальным привлечением посторонних лиц. После планирования теги могут быть легко развернуты.
Как уже упоминалось, важным преимуществом является то, что за счет комбинации двух способов позиционирования с различными характеристиками, может быть достигнута более высокая точность, чем в любом другом аналогичном продукте на рынке, и в то же самое время можно избежать высокозатратных усилий калибровки.
Согласно другому варианту осуществления, система может быть интегрирована в качестве платформы для контекстно-осведомленной промышленной автоматизации, обеспечивая операторов производства контекстно-осведомленной технологией, которая отображает только необходимую информацию в зависимости от местоположения пользователя.
Другой вариант осуществления в контексте промышленной среды заключается в автоматизации безопасности для крупномасштабного машинного оборудования; машинное оборудование может быть осведомлено об операциях в его окрестности и может приостанавливать свою операцию, если кто-то оказался слишком близко к нему, таким образом, предотвращая несчастные случаи, возможно, с фатальным исходом.
В соответствии с другим вариантом осуществления, один или несколько вариантов осуществления, приведенных выше, интегрированы с существующими картографическими платформами для обеспечения глобальной системы позиционирования внутри помещений. Основное преимущество по отношению к существующим системам заключается в отсутствии калибровки, незначительных усилиях для развертывания и пассивном поведении приложения, то есть, не требуется никаких усилий со стороны пользователя. Другие решения часто требуют этапов обширных измерений и требуют от пользователя выполнения таких действий, как съемка изображений его окружения.
Хотя настоящее изобретение было описано в соответствии с предпочтительными вариантами осуществления, для специалиста в данной области техники является очевидным, что модификации или комбинации вариантов осуществления, полностью или в одном или нескольких аспектах, возможны во всех вариантах осуществления изобретения.
Высокомощный выравнивающий шарнир с качающейся плитой
Способ и устройство для регулирования паротурбинной электростанции
Определение места неисправности в электрических сетях энергоснабжения с использованием принципа дистанционной защиты
Способ установки состояния прокатываемого материала, в частности, черновой полосы
Способ нанесения покрытия и антикоррозионное покрытие для компонентов турбин
Механизм переключения устройства защиты от тока утечки, а также система с устройством защиты от тока утечки и линейным защитным автоматом
Устройство для осаждения ферромагнитных частиц из суспензии
Устройство для управления установкой электродуговой печи
Определение времени тревожной сигнализации сигнализатора опасности
Способ функционирования компрессорного устройства и соответствующее компрессорное устройство

