Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ
Вид РИД
Изобретение
Изобретение относится к аэрокосмической технике и может быть использовано для обеспечения ориентирования экипажем пилотируемого корабля аппаратуры, перемещаемой относительно движущегося корабля.
Известен способ наведения линии визирования прибора, вращающегося вокруг своей оси относительно основания, на источник лазерного излучения (заявка на изобретение РФ №94000376/28, 05.01.1994, МПК 6: F41G 3/00, G05D 3/00), в котором грубо определяют угловое положение источника излучения относительно связанного с основанием базового направления, проверяют соответствие излучения типу лазерный целеуказатель, поворачивают основание до точного определения углового положения источника излучения, после чего поворачивают прибор наведения до наведения его линии визирования на источник излучения.
К недостаткам данного способа относится требование идентификации цели по излучаемому целью излучению, что ограничивает возможности его использования.
Известен способ наведения телевизионного видеоспектрального комплекса, реализуемый системой управления телевизионным видеоспектральным комплексом космического аппарата (КА) (патент РФ №2068801, МПК 6: B64G 9/00), который включает наведение и отслеживание целей, при которых выполняется переориентация оси визирования установленной на поворотной платформе телевизионной и научной аппаратуры на выбираемую в реальном времени по ТВ-изображению цель с последующим автоматическим отслеживанием цели, в том числе выполняется определение пространственного положения прибора наведения относительно КА, задание координат целей, определение положения целей относительно прибора наведения, расчет углов поворота прибора наведения и повороты прибора наведения.
К недостаткам данного способа относится, в частности, то, что он позволяет наводиться только на цели, с одной стороны, ограниченные диапазоном углов поворота поворотной платформы, а с другой стороны, ограниченные попаданием в текущий кадр ТВ-изображения, который, кроме упомянутого ограничения по диапазону углов поворота поворотной платформы, имеет ограниченный охват, определяемый полем зрения ТВ-камеры. При этом сам факт размещения аппаратуры наведения на поворотной платформе ограничивает свободу перемещения аппаратуры при ее нацеливании и сопровождении цели экипажем КА.
В качестве способа-прототипа выбран способ ориентирования перемещаемого в пилотируемом аппарате прибора (патент РФ 2531781, заявка №2012134959/11 от 16.08.2012, МПК (2006.01): F41G 3/00 B64G 1/66 - прототип), согласно которому осуществляют формирование управляющих команд на излучение импульсных ультразвуковых сигналов не менее, чем тремя ультразвуковыми излучателями, размещенными в разнесенных точках на свободно перемещаемом относительно пилотируемого аппарата приборе, осуществляют прием излученных импульсных ультразвуковых сигналов не менее, чем тремя ультразвуковыми приемниками, размещенными в разнесенных точках на пилотируемом аппарате, по излученным и принятым ультразвуковым сигналам измеряют время задержки ультразвуковых сигналов, при этом синхронизацию моментов излучения и приема импульсных ультразвуковых сигналов осуществляют по радиоканалу, осуществляют измерение температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников, по полученным временам задержки принятия ультразвуковых сигналов и измерениям температуры определяют расстояния от размещенных на приборе ультразвуковых излучателей до размещенных на пилотируемом аппарате ультразвуковых приемников, при этом пространственное положение прибора относительно пилотируемого аппарата определяют по определенным расстояниям от размещенных на приборе ультразвуковых излучателей до размещенных на пилотируемом аппарате ультразвуковых приемников, определяют текущее положение ориентиров относительно пилотируемого аппарата, пространственное положение ориентиров относительно прибора определяют по текущему положению ориентиров относительно пилотируемого аппарата и определенному пространственному положению прибора относительно пилотируемого аппарата, выполняют расчет углов поворота прибора для его ориентирования по ориентирам, после чего воспроизводят команды на поворот прибора, соответствующие рассчитанным значениям углов поворота прибора. Способ прототип обеспечивает возможность оператору выполнять ориентирование/наведение прибора, свободно перемещаемого внутри пилотируемого аппарата (корабля) и не имеющего с ним механической связи.
К недостаткам способа прототипа относится, в частности, то, что он предусматривает ручное управление работой перемещаемой ориентируемой аппаратуры, что может привести к ошибочному или несвоевременному функциональному задействованию аппаратуры, что в свою очередь может привести к потере уникальных целевых данных и/или регистрации аппаратурой данных, которые являются неликвидными. Такая ситуация может возникать как следствие, например, возможной технологической несогласованности в функциональной работе перемещаемой аппаратуры и используемых бортовых систем пилотируемого корабля.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение высокоточного целевого ориентирования перемещаемой на борту пилотируемого корабля аппаратуры.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении гарантированной доступности выбранного ориентира наблюдению перемещаемой аппаратурой при одновременном обеспечении целевого управления аппаратурой, свободно перемещаемой относительно пилотируемого корабля и ориентируемой по задаваемым ориентирам.
Технический результат достигается тем, что в способе ориентирования перемещаемой на борту пилотируемого корабля аппаратуры, включающем определение положения ориентира и перемещаемой аппаратуры относительно пилотируемого корабля, определение положения ориентира относительно перемещаемой аппаратуры, определение углов поворота перемещаемой аппаратуры и воспроизведение команд на поворот перемещаемой аппаратуры, в отличие от прототипа дополнительно определяют и воспроизводят командную информацию на перенос перемещаемой аппаратуры в местоположение, направление из которого на ориентир в течение задаваемого интервала времени отстоит не менее чем на задаваемое расстояние от элементов конструкции пилотируемого корабля, непрозрачных для регистрируемого перемещаемой аппаратурой излучения, а определение и воспроизведение командной информации на поворот перемещаемой аппаратуры в требуемое угловое положение выполняют начиная с момента совпадения параметров, определяющих соответственно требуемое и текущее местоположения перемещаемой аппаратуры относительно пилотируемого корабля, при этом требуемое угловое положение перемещаемой аппаратуры определяют из условия совмещения оси ориентирования перемещаемой аппаратуры с направлением на ориентир, к моменту совпадения параметров, определяющих соответственно требуемое и текущее положения ориентира относительно оси ориентирования перемещаемой аппаратуры, формируют команду на управление перемещаемой аппаратурой.
Изобретение поясняется фиг. 1 и 2.
На фиг. 1 представлена блок-схема системы, поясняющей предлагаемый способ.
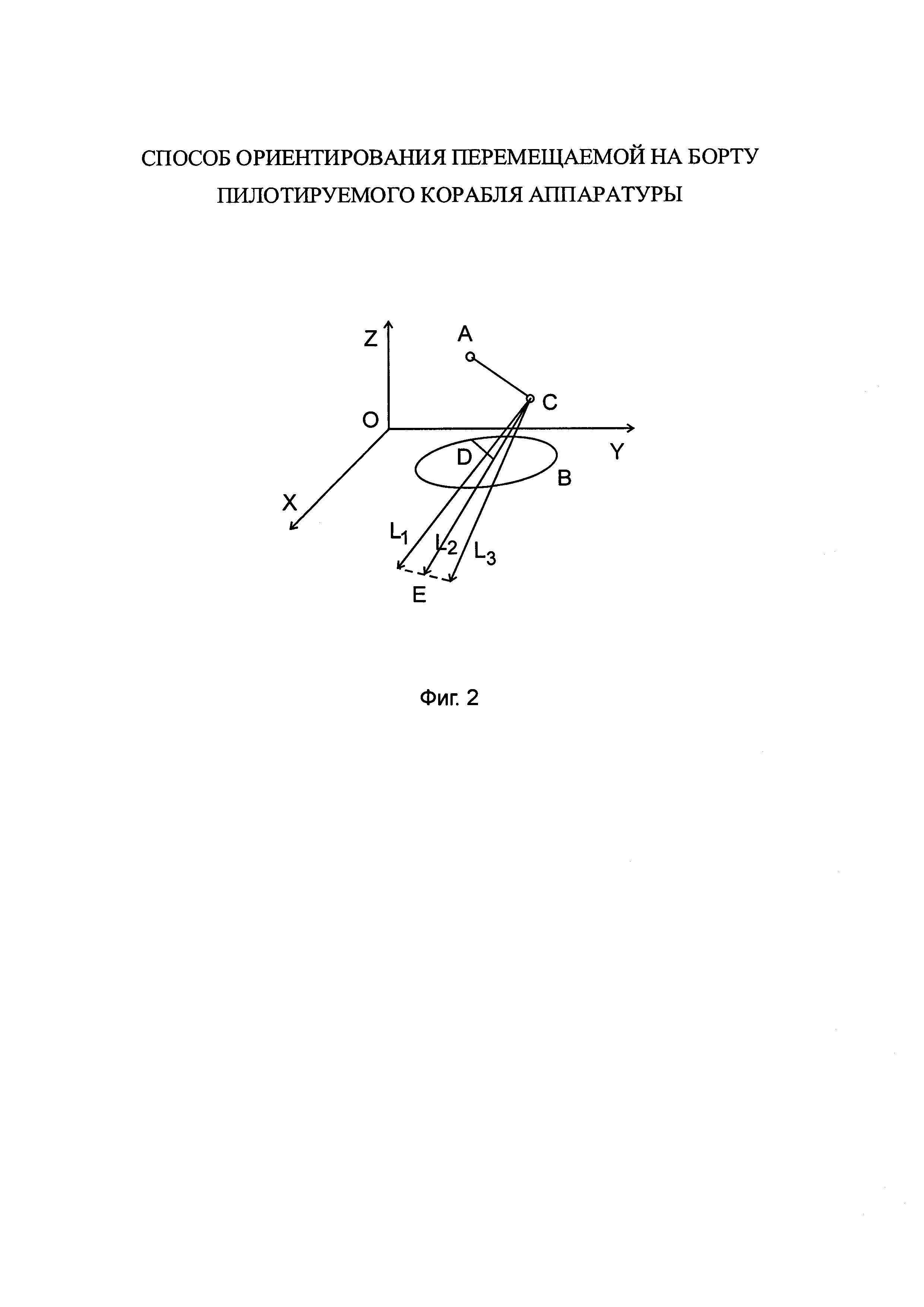
На фиг. 2 представлена схема, поясняющая определение требуемого местоположения перемещаемой аппаратуры.
На фиг. 1 введены обозначения:
1 - перемещаемая аппаратура;
2 - блок определения положения перемещаемой аппаратуры относительно пилотируемого корабля;
3 - блок формирования командной информации на перенос и поворот перемещаемой аппаратуры;
4 - блок приема-передачи информации;
5 - блок передачи информации по радиоканалу, установленный на пилотируемом корабле;
6 - блок приема информации по радиоканалу, установленный на перемещаемой аппаратуре;
7 - блок воспроизведения командной информации на перенос и поворот перемещаемой аппаратуры;
8 - блок определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля;
9 - блок определения требуемого местоположения перемещаемой аппаратуры относительно ориентира и элементов конструкции пилотируемого корабля;
10 - блок сравнения требуемого и текущего местоположений перемещаемой аппаратуры;
11 - блок определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры;
12 - блок формирования команд управления перемещаемой аппаратурой;
13 - блок определения текущего и прогнозируемого положений ориентира относительно оси ориентирования перемещаемой аппаратуры;
14 - блок сравнения параметров требуемого и определенного положений ориентира относительно оси ориентирования перемещаемой аппаратуры.
На фиг. 2 введены обозначения:
OXYZ - система координат пилотируемого корабля;
А - текущее местоположение перемещаемой аппаратуры;
В - граница элементов конструкции пилотируемого корабля, непрозрачных для регистрируемого перемещаемой аппаратурой излучения (граница/край иллюминатора);
С - точка, направление из которой на ориентир в течение задаваемого интервала времени отстоит не менее чем на задаваемое расстояние от элементов конструкции пилотируемого корабля, непрозрачных для регистрируемого перемещаемой аппаратурой излучения;
D - расстояние от элементов конструкции пилотируемого корабля, непрозрачных для регистрируемого перемещаемой аппаратурой излучения, до направления из точки С на ориентир;
L1, L2, L3 - направления из точки С на ориентир на моменты соответственно начала, середины и окончания рассматриваемого интервала времени;
Е - перемещение положения ориентира относительно пилотируемого корабля в течение рассматриваемого интервала времени.
Опишем действия предлагаемого способа на примере функционирования поясняющей предлагаемый способ системы.
В качестве перемещаемой аппаратуры (ПА) рассматриваем оптический прибор, ось визирования (чувствительности) которого требуется наводить на задаваемые ориентиры (цели) - например, съемочную аппаратуру для выполнения визуально-инструментальных наблюдений задаваемых ориентиров (например, исследуемых наземных объектов) через иллюминатор пилотируемого корабля (ПК).
Система содержит блок определения положения перемещаемой аппаратуры относительно пилотируемого корабля 2, блок формирования командной информации на перенос и поворот перемещаемой аппаратуры 3, блок приема-передачи информации 4, блок воспроизведения командной информации на перенос и поворот перемещаемой аппаратуры 7, блок определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8, блок определения требуемого местоположения перемещаемой аппаратуры относительно ориентира и элементов конструкции пилотируемого корабля 9, блок сравнения требуемого и текущего местоположений перемещаемой аппаратуры 10, блок определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11 и блок формирования команд управления перемещаемой аппаратурой 12.
Выход блока определения положения перемещаемой аппаратуры относительно пилотируемого корабля 2 соединен в первыми входами блока формирования командной информации на перенос и поворот перемещаемой аппаратуры 3, блока сравнения требуемого и текущего местоположений перемещаемой аппаратуры 10, блока определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11 и блока определения требуемого местоположения перемещаемой аппаратуры относительно ориентира и элементов конструкции пилотируемого корабля 9.
Второй вход и выход блока определения требуемого местоположения перемещаемой аппаратуры относительно ориентира и элементов конструкции пилотируемого корабля 9 соединены с соответственно выходом блока определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8 и вторыми входами блока сравнения требуемого и текущего местоположений перемещаемой аппаратуры 10 и блока формирования командной информации на перенос и поворот перемещаемой аппаратуры 3.
Третий и четвертый входы и выход блока формирования командной информации на перенос и поворот перемещаемой аппаратуры 3 соединены с соответственно выходом блока сравнения требуемого и текущего местоположений перемещаемой аппаратуры 10, выходом блока определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8 и вторым входом блока определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11.
Третий и четвертый входы и выход блока определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11 соединены с соответственно выходом блока определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8, выходом блока сравнения требуемого и текущего местоположений перемещаемой аппаратуры 10 и входами блока определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8 и блока формирования команд управления перемещаемой аппаратурой 12.
Выход блока формирования команд управления перемещаемой аппаратурой 12 связан с перемещаемой аппаратурой 1 (через блок приема-передачи информации 4).
Выход блока формирования командной информации на перенос и поворот перемещаемой аппаратуры 3 также связан с блоком воспроизведения командной информации на перенос и поворот перемещаемой аппаратуры 7 (через блок приема-передачи информации 4).
Блок приема-передачи информации 4 включает блок передачи информации по радиоканалу 5, установленный на пилотируемом корабле, и блок приема информации по радиоканалу 6, установленный на перемещаемой аппаратуре.
Блок передачи информации по радиоканалу 5 включает контроллер и передающее радиоустройство.
Блок приема информации по радиоканалу 6 включает контроллер и приемное радиоустройство.
Блок определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11 включает блок определения текущего и прогнозируемого положений ориентира относительно оси ориентирования перемещаемой аппаратуры 13 и блок сравнения параметров требуемого и определенного положений ориентира относительно оси ориентирования перемещаемой аппаратуры 14.
Входами блока определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11 являются входы блока определения текущего и прогнозируемого положений ориентира относительно оси ориентирования перемещаемой аппаратуры 13, выход которого соединен со входом блока сравнения параметров требуемого и определенного положений ориентира относительно оси ориентирования перемещаемой аппаратуры 14, выход которого является выходом блока определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11.
Посредством блока определения положения перемещаемой аппаратуры относительно пилотируемого корабля 2 определяют текущее положение (местоположение и угловое положение) ПА относительно ПК. Данный блок может быть реализован на базе ультразвуковой системы определения положения перемещаемой аппаратуры, в которой для измерения шести координат пространственного положения ПА - трех линейных и трех угловых параметров - используются не менее трех ультразвуковых излучателей, размещенных на ПА, и не менее трех ультразвуковых приемников, размещенных на ПК. Ультразвуковые излучатели размещены в разнесенных точках с известными координатами в связанной с ПА системе координат. Ультразвуковые приемники размещены в разнесенных точках с известными координатами в связанной с ПК системе координат. В начале каждого кадра измерения вырабатывается синхронизирующий импульс запуска, поступающий на блок формирования команд управления излучателями, который последовательно формирует управляющие импульсы с фиксированной временной задержкой т между ними, которые поступают на ультразвуковые излучатели, которые поочередно вырабатывают импульсные ультразвуковые сигналы. Излученные ультразвуковые сигналы принимаются размещенными на ПК ультразвуковыми приемниками (временная задержка т определяется максимально возможным расстоянием от размещенных на ПА ультразвуковых излучателей до каждого из размещенных на ПК ультразвуковых приемников), а периодичность выработки синхронизирующих импульсов запуска определяется данной временной задержкой т и общим количеством ультразвуковых излучателей. Принятые ультразвуковые сигналы отделяются от помех и вычисляются временные задержки между импульсом запуска и принятыми рабочими сигналами (поскольку излученные импульсные ультразвуковые сигналы разнесены по времени, то в каждом из приемников принятые рабочие сигналы также разнесены по времени), по которым рассчитываются расстояния между ультразвуковыми излучателями и ультразвуковыми приемниками, причем текущая скорость распространения ультразвуковых сигналов между излучателями и приемниками определяется с учетом текущей температуры среды распространения сигналов, измеренной датчиком температуры, размещенном на ПА и/или ПК, и по полученным расстояниям рассчитываются параметры пространственного положения ПА относительно ПК (линейные и угловые координаты ПА в связанной с ПК системе координат).
Посредством блока определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8 определяют текущие и расчетные прогнозируемые на задаваемом интервале времени, предназначенном для реализации штатных операций с ПА, параметры положения ориентира относительно ПК. В качестве ориентира для реализации штатных операций с ПА выбирают, например, некоторый текущий ориентир из перечня возможных ориентиров, заданного каталогом ориентиров. Например, прогнозирование указанных параметров может быть выполнено с использованием навигационных измерений, по которым определяют текущие и расчетные прогнозируемые на рассматриваемом интервале времени параметры положения центра масс ПК и ориентации ПК, по которым определяют текущие и расчетные прогнозируемые положения (координаты) ориентира относительно ПК.
Посредством блока определения требуемого местоположения перемещаемой аппаратуры относительно ориентира и элементов конструкции пилотируемого корабля 9 из множества точек, пригодных для размещения в них перемещаемой аппаратуры, определяют в системе координат ПК точку (например, ближайшую к текущему местоположению перемещаемой аппаратуры), направление из которой на ориентир в течение задаваемого интервала времени отстоит не менее чем на задаваемое расстояние от элементов конструкции ПК, непрозрачных для регистрируемого перемещаемой аппаратурой излучения:
D≥Dmin,
где D - расстояние от элементов конструкции ПК, непрозрачных для регистрируемого перемещаемой аппаратурой излучения, до направления из данной точки на ориентир;
Dmin - задаваемое минимальное расстояние от элементов конструкции ПК, непрозрачных для регистрируемого перемещаемой аппаратурой излучения, до направления из данной точки на ориентир.
Например, в качестве непрозрачных для излучения, регистрируемого перемещаемой оптической аппаратурой, рассматриваем оптически непрозрачные элементы конструкции ПК - все элементы конструкции ПК, за исключением иллюминаторов (см. фиг. 2).
Посредством блока сравнения требуемого и текущего местоположений перемещаемой аппаратуры 10 сравнивают текущие определяемые координаты местоположения ПА с координатами данной точки и по результатам сравнения проверяют данную точку на ее совпадение с текущим местоположением ПА.
В случае расхождения данной точки и текущего местоположения ПА посредством блока формирования командной информации на перенос и поворот перемещаемой аппаратуры 3 определяют параметры командной информации на перенос ПА из текущего местоположения в данную точку.
В качестве операций по переносу ПА относительно ПК могут рассматриваться, например, операции переноса ПА, описываемые (формулируемые) линейными величинами отклонения центральной точки или центра масс ПА от требуемого местоположения центральной точки или центра масс ПА и направлениями, задаваемыми в связанной с ПК системе координат, вдоль которых отсчитываются данные отклонения, и др.
Данную командную информацию через блок передачи информации по радиоканалу 5, установленный на ПК, и блок приема информации по радиоканалу 6, установленный на ПА, передают на блок воспроизведения командной информации на перенос и поворот перемещаемой аппаратуры 7, посредством которого воспроизводят данную командную информацию. Оператор воспринимает воспроизведенную командную информацию и в соответствии с ней изменяет местоположение ПА относительно ПК.
Например, воспроизведение командной информации может быть реализовано отображением на средствах визуального отображения, выводящих изображение, например, на дисплей или очки, командной информации в графическом представлении или аудио воспроизведением на звуковоспроизводящей аппаратуре, выводящей звук, например, на динамики или наушники, командной информации в звуковом представлении. В качестве воспроизводимой командной информации выступают, например, параметры местоположения ПА относительно ПК (например, графически отображается величина линейных отклонений местоположения ПА от ее требуемого местоположения, отсчитываемых вдоль направлений, задаваемых в связанной с ПК системе координат) и параметры положения оси ориентирования (визирования, чувствительности) ПА относительно направления от ПА на ориентир - например, графически отображается величина углового отклонения направления на ориентир от оси ориентирования ПА и величина азимутального угла, определяющего направление отсчета данного отклонения в плоскости, перпендикулярной оси ориентирования ПА.
В процессе изменения местоположения ПА посредством блока определения положения перемещаемой аппаратуры относительно пилотируемого корабля 2 определяют текущее местоположение ПА относительно ПК.
Посредством блока 10 продолжают сравнивать текущие определяемые координаты местоположения перемещаемой аппаратуры относительно ПК с координатами вышеупомянутой точки.
Начиная с момента совпадения (с задаваемой точностью) данной точки и текущего местоположения ПА посредством блока формирования командной информации на перенос и поворот перемещаемой аппаратуры 3 определяют параметры командной информации на поворот ПА относительно ПК из текущего углового положения до достижения требуемого углового положения ПА относительно ПК - положения, при котором ось ориентирования ПА совмещена с направлением на ориентир. При этом выполняют определение текущих и расчетных прогнозируемых на задаваемом интервале времени параметров углового положения ориентира относительно оси ориентирования ПА.
В качестве операций по повороту ПА относительно ПК могут рассматриваться, например, операции поворота ПА, описываемые (формулируемые) угловыми величинами отклонения связанной с ПА системы координат от ее требуемого углового положения, заданного в связанной с ПК системе координат, например, угловыми величинами отклонения оси ориентирования ПА от ее требуемого положения и азимутального угла, определяющего направление отсчета данного отклонения в плоскости, перпендикулярной оси ориентирования ПА, и др.
Данную командную информацию через блок передачи информации по радиоканалу 5, установленный на ПК, и блок приема информации по радиоканалу 6, установленный на ПА, передают на блок воспроизведения командной информации на перенос и поворот перемещаемой аппаратуры 7, посредством которого воспроизводят данную командную информацию. Оператор воспринимает воспроизведенную командную информацию и в соответствии с ней изменяет угловое положение ПА относительно ПК.
В процессе изменения углового положения ПА посредством блока определения положения перемещаемой аппаратуры относительно пилотируемого корабля 2 определяют текущее угловое положение ПА относительно ПК.
Посредством блока определения моментов достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры 11 определяют текущее и прогнозируемое положения ориентира относительно оси ориентирования перемещаемой аппаратуры, сравнивают параметры требуемого положения ориентира относительно оси ориентирования ПА с параметрами текущего и расчетного прогнозируемого положения ориентира относительно оси ориентирования ПА и по результатам данного сравнения определяют моменты достижения требуемого положения ориентира относительно оси ориентирования перемещаемой аппаратуры.
Посредством блока формирования команд управления перемещаемой аппаратурой 12 к моменту совпадения (с задаваемой точностью) параметров требуемого и текущего положений ориентира относительно оси ориентирования ПА формируют командную информацию на управление перемещаемой аппаратурой. При этом указанная точность совпадения определяется требуемыми на момент целевого применения ПА характеристиками положения ориентира относительно оси ориентирования ПА.
Данную командную информацию через блок передачи информации по радиоканалу 5, установленный на ПК, и блок приема информации по радиоканалу 6, установленный на ПА, передают на перемещаемую аппаратуру 1. В соответствии с поступившей командной информацией осуществляется своевременная реализация необходимого управления перемещаемой аппаратурой - например, автоматическая реализация циклов включений и выключений перемещаемой аппаратуры для выполнения съемки или иной регистрации целевых данных.
Далее повторяют описанные действия, начиная с выбора следующего ориентира для реализации штатных операций с ПА и определения посредством блока определения текущего и прогнозируемого положений ориентира относительно пилотируемого корабля 8 текущих и расчетных прогнозируемых на задаваемом интервале времени параметров положения ориентира относительно ПК, после чего продолжают работу системы по вышеописанной процедуре.
Опишем технический эффект предлагаемого изобретения.
Предложенное техническое решение обеспечивает гарантированную доступность выбранного ориентира наблюдению перемещаемой аппаратурой при одновременном обеспечении целевого управления функционированием аппаратуры, свободно перемещаемой относительно пилотируемого корабля и ориентируемой по задаваемым ориентирам.
В том числе, предлагаемое техническое решение обеспечивает исключение/недопущение возможности ошибочного/несвоевременного функционального задействования аппаратуры, что в свою очередь исключает возможность потери уникальных целевых данных и/или регистрации аппаратурой данных, которые являются неликвидными. Также предлагаемое техническое решение позволяет устранить негативное влияние такого фактора как возможная технологическая несогласованность в функциональной работе перемещаемой аппаратуры и используемых бортовых систем корабля.
Особенно важность указанного положительного эффекта проявляется при применении предлагаемого технического решения на КА в полете, когда, с одной стороны, отсутствует или существенно ограничена (как технически, так и организационно) оперативная возможность проверки качества зарегистрированных аппаратурой данных, а с другой стороны, регистрируемые данные обладают уникальностью и их потеря или несвоевременная регистрация могут нести невосполнимый ущерб (как научный, так и экономический).
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры, включающий определение положения ориентира и перемещаемой аппаратуры относительно пилотируемого корабля, определение положения ориентира относительно перемещаемой аппаратуры, определение углов поворота перемещаемой аппаратуры и воспроизведение команд на поворот перемещаемой аппаратуры, отличающийся тем, что определяют и воспроизводят командную информацию на перенос перемещаемой аппаратуры в местоположение, направление из которого на ориентир в течение задаваемого интервала времени отстоит не менее чем на задаваемое расстояние от элементов конструкции пилотируемого корабля, непрозрачных для регистрируемого перемещаемой аппаратурой излучения, а определение и воспроизведение командной информации на поворот перемещаемой аппаратуры в требуемое угловое положение выполняют начиная с момента совпадения параметров, определяющих соответственно требуемое и текущее местоположения перемещаемой аппаратуры относительно пилотируемого корабля, при этом требуемое угловое положение перемещаемой аппаратуры определяют из условия совмещения оси ориентирования перемещаемой аппаратуры с направлением на ориентир, к моменту совпадения параметров, определяющих соответственно требуемое и текущее положения ориентира относительно оси ориентирования перемещаемой аппаратуры, формируют команду на управление перемещаемой аппаратурой.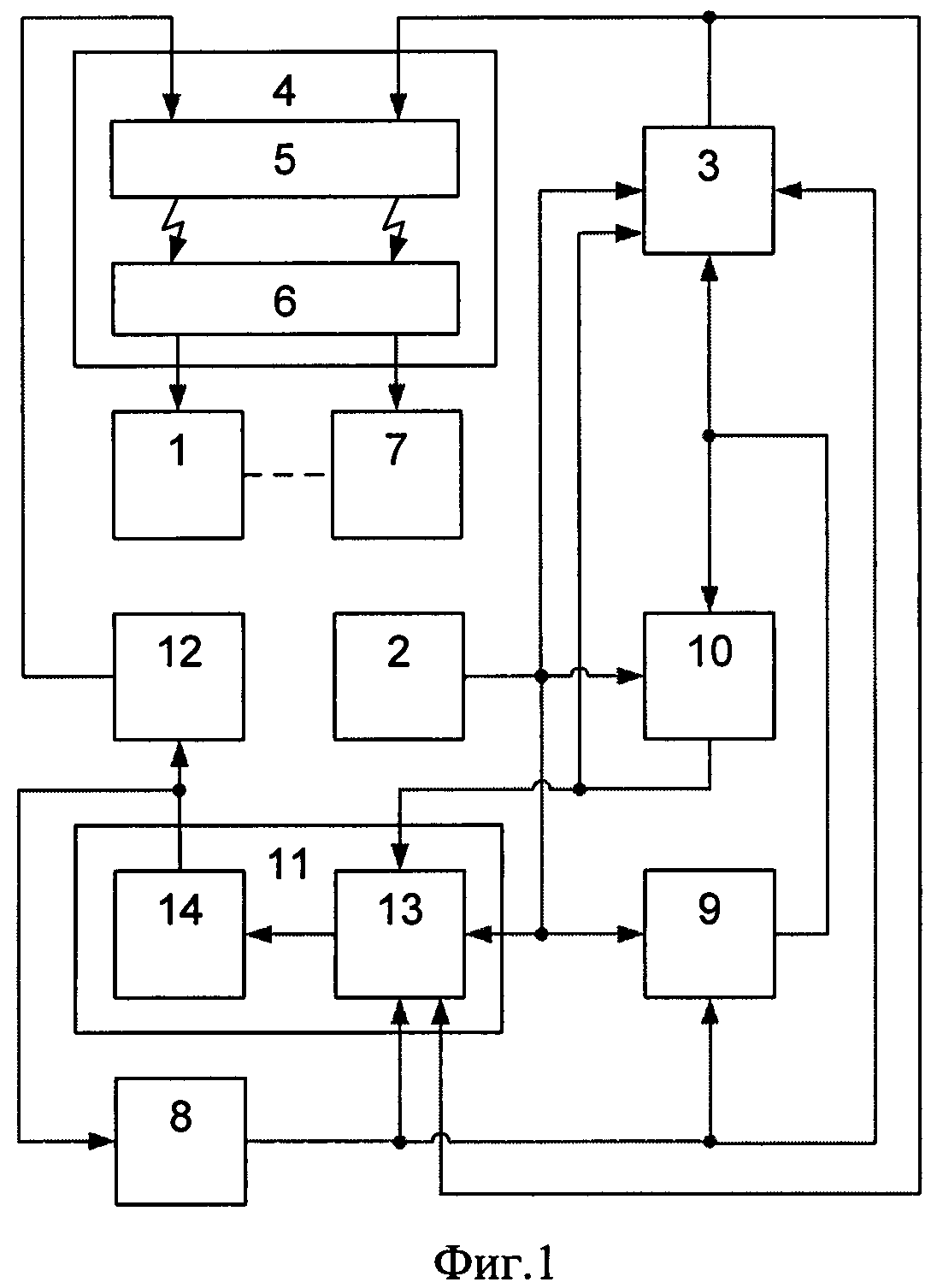
Способ поиска и обнаружения микроорганизмов космического происхождения
Способ и устройство взятия проб вещества с поверхности астрономического объекта
Способ проведения режима циклирования герметичной никель-кадмиевой аккумуляторной батареи
Способ контроля текущего состояния солнечной батареи космического аппарата с инерционными исполнительными органами
Ракетный разгонный блок
Способ контроля положения фронтальной части ледника с находящегося на околокруговой орбите космического аппарата
Блок конденсаторов и способ контроля его исправности (2 варианта)
Механизм герметизации стыка стыковочного агрегата космического корабля
Способ контроля телеметрической информации
Способ контроля действий находящегося на борту космического аппарата космонавта
Устройство для выбора астрономических объектов наблюдения с орбитального космического аппарата
Устройство для выбора астрономических объектов наблюдения с орбитального космического аппарата
Способ определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, система для его осуществления и устройство размещения излучателей на аппаратуре наблюдения
Устройство для доставки объекта
Способ ориентирования перемещаемого в пилотируемом аппарате прибора и система для его осуществления
Способ управления орбитальным космическим аппаратом
Способ управления орбитальным космическим аппаратом
Способ управления ориентацией космического транспортного грузового корабля с неподвижными панелями солнечных батарей при проведении работ в условиях вращательного движения
Способ управления ориентацией космического транспортного грузового корабля с неподвижными панелями солнечных батарей при проведении работ в условиях вращательного движения
Способ управления ориентацией космического транспортного грузового корабля с неподвижными панелями солнечных батарей при проведении работ в условиях вращательного движения

