Способ обнаружения, классификации и определения координат и параметров движения морской шумящей цели
Вид РИД
Изобретение
Изобретение относится к области гидроакустики, а именно к пассивным шумопеленгаторным станциям (ШПС), предназначенным для поиска и обнаружения шумящих морских объектов (целей).
При решении практических задач гидроакустики обнаружение цели состоит из решения трех задач:
1) обнаружение сигнала, т.е. установление факта наличия источника шумового сигнала (морской шумящей цели) и определение одной его координаты - направления (пеленга или курсового угла) [1, 2];
2) определение класса цели [3, 4];
3) определение координат и параметров движения цели (КПДЦ) [5, 6].
Способы обнаружения и определения координат и параметров движения источника шумового сигнала приведены в работах [1, 2]. В известных ШПС эти 3 задачи решаются последовательно, в результате чего обнаружение целей занимает длительное время (до нескольких десятков минут), что в ряде случаев является неприемлемым.
В качестве прототипа выбран способ обнаружения и определения координат и параметров движения источников шумового сигнала, приведенный в работе [1]. Традиционная временная диаграмма обнаружения цели в ШПС приведена на фиг. 1. Обнаружение цели состоит из нескольких этапов и начинается с завязки новой сигнальной траектории (далее - траектории), т.е. с момента последовательного обнаружения не менее двух сигналов, не отнесенных ни к одной из наблюдаемых траекторий.
На этапе 1 по последовательности принятых сигналов осуществляется построение траектории с одновременной проверкой двух альтернативных статистических гипотез о происхождении траектории: траектория обусловлена приемом сигналов локального шумящего объекта, либо траектория сформирована из помеховых сигналов, случайно образовавших траекторию. Этап 1 длится от десятков секунд до единиц минут и завершается либо принятием решения об обнаружении новой цели (когда выполнен статистический критерий регулярности сигнальной траектории), либо сбросом траектории с сопровождения как помеховой (также в результате выполнения соответствующего статистического критерия) [7]. Принятие решения об обнаружении новой цели сопровождается определением ее пеленга.
С момента принятия решения об обнаружении цели начинается ее классификация, которая является содержанием этапа 2. На данном этапе осуществляется статистическая проверка нескольких альтернативных гипотез по числу классов в заданном алфавите распознаваемых классов целей (далее - заданный алфавит классов целей). Этап 2 завершается принятием решения о классе цели. Длительность данного этапа может варьироваться от десятков секунд до десятков минут в зависимости от класса цели, условий ее наблюдения, уровня автоматизации процесса классификации и опыта оператора [3, 4].
Этап 3 определения КПДЦ начинается с момента принятия решения о классе цели и завершается определением ее координат и параметров движения. В зависимости от используемых методов и заданной точности определения КПДЦ данный этап может длиться от единиц до нескольких десятков минут [5, 6].
С завершением третьего этапа обнаружения цели начинается следующий этап 4 принятия уточненных решений - сопровождение цели, на котором продолжается построение сигнальной траектории объекта с одновременным уточнением его класса и КПДЦ.
Решаемая техническая проблема - повышение эффективности шумопеленгаторных станций.
Технический результат - сокращение времени обнаружения и классификации целей.
Указанный технический результат достигается тем, что все 3 задачи, составляющие обнаружение цели, решаются совместно на одном и том же временном цикле.
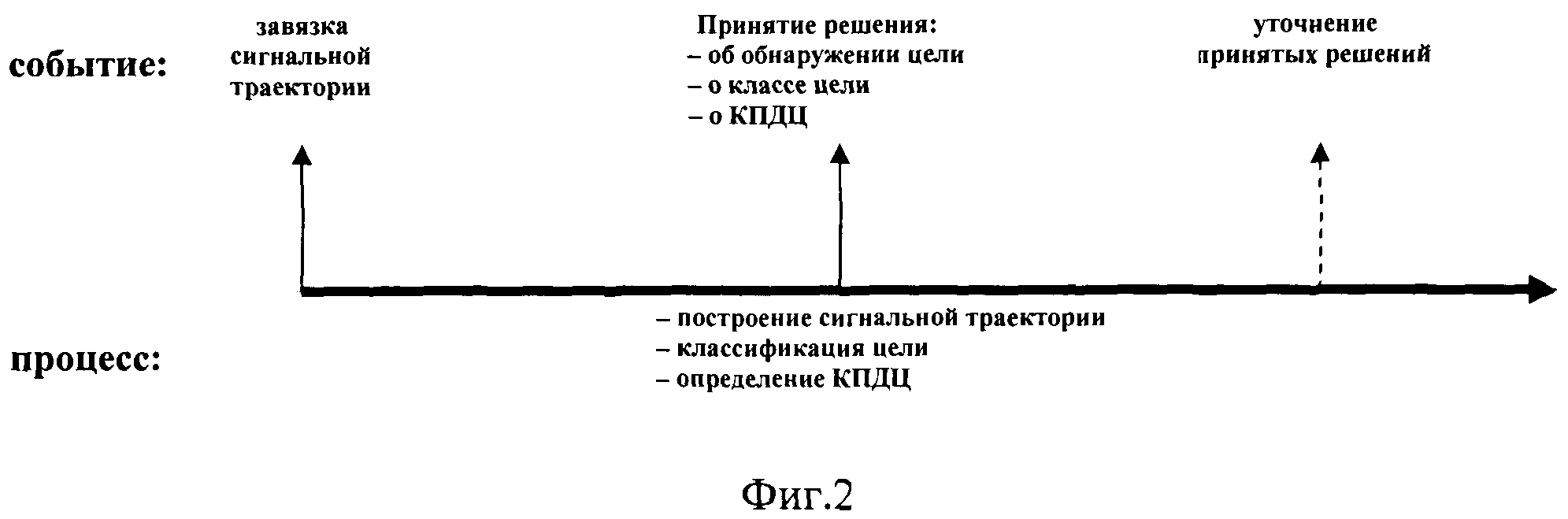
Реализация совместного решения трех задач приведена на фиг. 2. С момента завязки новой сигнальной траектории начинается статистическая проверка не двух гипотез («цель» - «помеха»), а М+1 гипотез (М - количество классов в заданном алфавите классов целей), т.е. проверяются гипотезы о принадлежности траектории к каждому из М классов заданного алфавита классов цели, а также к классу "помеха". Проверка гипотез осуществляется циклически при поступлении любой новой информации и состоит в вычислении вероятностей принадлежности траектории каждому из классов заданного алфавита (далее - вероятность класса цели) и сравнении вычисленных вероятностей с заданным пороговым значением (далее - пороговое значение). Для расчета вероятностей класса цели применяются автоматические адаптивные алгоритмы, учитывающие текущие гидроакустические и помехосигнальные условия, а также взаимную статистическую зависимость используемых параметров сигнала (классификационных признаков) [4]. Если хотя бы одна из вычисленных вероятностей превышает пороговое значение, принимается решение в пользу соответствующей гипотезы. В противном случае процесс проверки гипотез продолжается. При этом процесс проверки гипотез продолжается и в случае вынесения решения о принадлежности траектории к одному из классов заданного алфавита. Только в этом случае он приобретает статус уточнения решения.
Если сигнальная траектория прервется до принятия решения в пользу одной из гипотез, она принимается за траекторию, состоящую из помех (помеховую траекторию) и ее обработка прекращается.
Для проверки М+1 гипотезы, кроме последовательности рассчитываемых значений координат источника сигналов, выработанных в ходе 1-го этапа при традиционной организации решения задачи обнаружения объекта наблюдения, для проверки двух гипотез («цель» - «помеха») используются также параметры сигнала (уровень сигнала, отношение «сигнал-помеха», акустическая протяженность), применяемые на 2-м этапе и 3-ем этапе традиционной организации классификации обнаруженной цели и решения задачи определения КПДЦ.
Также с момента завязки новой траектории начинается решение задачи определения КПДЦ. Поскольку для эффективного определения КПДЦ должен быть известен класс цели [8], задача решается одновременно для каждой из М гипотез. Задача определения КПДЦ органично встраивается в схему совместного решения трех задач, поскольку для определения КПДЦ используются те же параметры, что и для классификации цели [9].
Описанный способ совместного решения трех задач реализуется с момента завязки новой траектории до ее прерывания по любой из причин. При этом процесс анализа траектории на отдельные этапы не делится. После вынесения первого решения относительно каждого из искомых параметров, на последующих циклах обработки начинается его уточнение (фиг. 2).
В качестве иллюстрации функционирования заявляемого способа приведем результаты его моделирования применительно к эпизоду обнаружения подводного объекта в условиях сплошной акустической освещенности в мелком море.
Подводный объект (цель) и объект-наблюдатель (наблюдатель) движутся прямолинейно и равномерно навстречу друг другу со скоростью 6 уз (фиг. 3). Курс наблюдателя 0°, цели - 180°. В момент завязки сигнальной траектории курсовые углы наблюдателя и цели равны 45°, дистанция между наблюдателем и целью 15 км, индикаторное отношение сигнал/помеха 3 дБ.
Заданный алфавит классов целей включает 2 класса - «подводный объект» и «надводный объект».
Алгоритм решения задачи функционирует с циклом 5 с. Заданное пороговое значение вероятности для принятия решения об обнаружении цели (вероятность класса цели) 0,8.
Результаты моделирования способа приведены на фиг. 4. По оси абсцисс на всех графиках отложено время с момента завязки сигнальной траектории. На фиг. 4а изображена динамика вероятностей принадлежности цели каждому классу заданного алфавита классов (сплошная линия соответствует классу «подводный объект», штриховая линия - классу «надводный объект», штрих-пунктирная линия обозначает порог принятия решения). Фиг .4б, 4в и 4г показывают динамику определения, соответственно, дистанции, курса и скорости цели для каждой из гипотез (штрих-пунктирная линия обозначает исходное заданное при моделировании значение соответствующего параметра).
Поясним логику функционирования алгоритма, реализующего заявляемый способ. Алгоритм начинает функционировать с момента завязки новой сигнальной траектории. На каждом цикле принятия решения для каждого класса заданного алфавита вычисляются вероятность принадлежности сигнальной траектории этому классу, а также рассчитываются значения дистанции, курса и скорости в предположении, что траектория принадлежит этому классу цели.
Из фиг. 4а следует, что на интервале времени от 0 до 120 секунд решение об обнаружении цели не выносится, поскольку вычисленные вероятности принадлежности сигнальной траектории каждому из классов алфавита не превышают заданного порогового значения 0,8. На 120-й секунде вероятность принадлежности сигнальной траектории классу «подводный объект» превысила пороговое значение и, как следствие этого, алгоритм принимает решение об обнаружении цели класса «подводный объект» и одновременно формирует формуляр обнаруженной цели, включающий класс цели «подводный объект», а также рассчитанные значения КПДЦ, соответствующие гипотезе "цель - подводный объект". Со следующего цикла и до завершения контакта с целью начинается уточнение класса и КПДЦ. Из рассмотрения графиков фиг. 4 следует:
- на 130-й секунде алгоритм выносит отказ от принятия решения о классе цели, однако со 140-й секунды решение в пользу класса «подводный объект» принимается стабильно;
- если в момент обнаружения цели на 120-й секунде ошибки определения КПДЦ составляли 10,9 км по дистанции, 20,5° по курсу и 2,3 уз по скорости, то на 300-й секунде эти ошибки уменьшились до 3,8 км по дистанции, 7,7° по курсу и 0,6 уз по скорости и имеют тенденцию к дальнейшему уменьшению.
Для сравнения было проведено моделирование того же эпизода при традиционной (последовательной) организации решения задачи обнаружения цели, но при использовании тех же алгоритмов классификации и определения КПДЦ. В результате было установлено, что выигрыш во времени решения задачи обнаружения и классификации объекта составил около 30%.
Таким образом, технический результат изобретения можно считать достигнутым.
Источники информации
1. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. // СПб.: Наука, 2004.
2. Урик Р.Дж. Основы гидроакустики. // Л.: Судостроение, 1978.
3. Телятников В.И. Методы и устройства классификации гидроакустических сигналов. Зарубежная радиоэлектроника, 1979, №9, с. 19-38.
4. Машошин А.И. Особенности синтеза алгоритмов классификации подводных объектов по их гидроакустическому полю Акустический журнал, 1996, том 42, №3, с. 396-400.
5. Телятников В.И. Методы и устройства для определения местоположения источника звука. // Зарубежная радиоэлектроника, 1978, №4. С. 66-86.
6. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. // Морская радиоэлектроника, 2012, №2 (40), с. 30-34.
7. Кузьмин С.З. Цифровая обработка радиолокационной информации. // М.: Сов. радио, 1974.
8. Гриненков А.В., Машошин А.И., Савватеев К. Алгоритм автоматического определения координат и параметров движения целей без специального маневрирования наблюдателя. // Морская радиоэлектроника, 2014, №4 (50), с. 50-57.
9. Машошин А.И. Об одном подходе к совместному решению задач классификации и определения координат подводных объектов по их гидроакустическому полю. // Акустический журнал, 1999, том 45, №1, с. 124-127.
Способ обнаружения, классификации и определения координат и параметров движения источника шумового сигнала (цели), включающий построение траекторий из обнаруженных сигналов, разделение построенных траекторий на сигнальные и помеховые, определение класса, координат и параметров движения источника каждой сигнальной траектории, отличающийся тем, что разделение траекторий на сигнальные и помеховые, определение класса, координат и параметров движения источника каждой траектории осуществляют одновременно с момента завязки траектории, для чего с момента завязки каждой траектории измеряют все параметры сигналов, формирующих траекторию, необходимые для классификации и определения координат и параметров движения источника траектории и с их использованием циклически вычисляют вероятности принадлежности источника траектории к каждому из классов заданного алфавита распознаваемых классов и к классу "помеха", а также координаты и параметры движения источника траектории при условии принадлежности источника траектории каждому из классов заданного алфавита распознаваемых классов, решение о классе источника траектории принимается на том цикле, на котором одна из вычисленных вероятностей принадлежности источника траектории к классам заданного алфавита распознаваемых классов превысила заданное пороговое значение, и в пользу того класса, которому соответствует вероятность, превысившая пороговое значение, а в качестве координат и параметров движения источника траектории принимают те, которые вычислены при условии принадлежности источника траектории тому из классов заданного алфавита распознаваемых классов, в пользу которого вынесено решение о классе цели.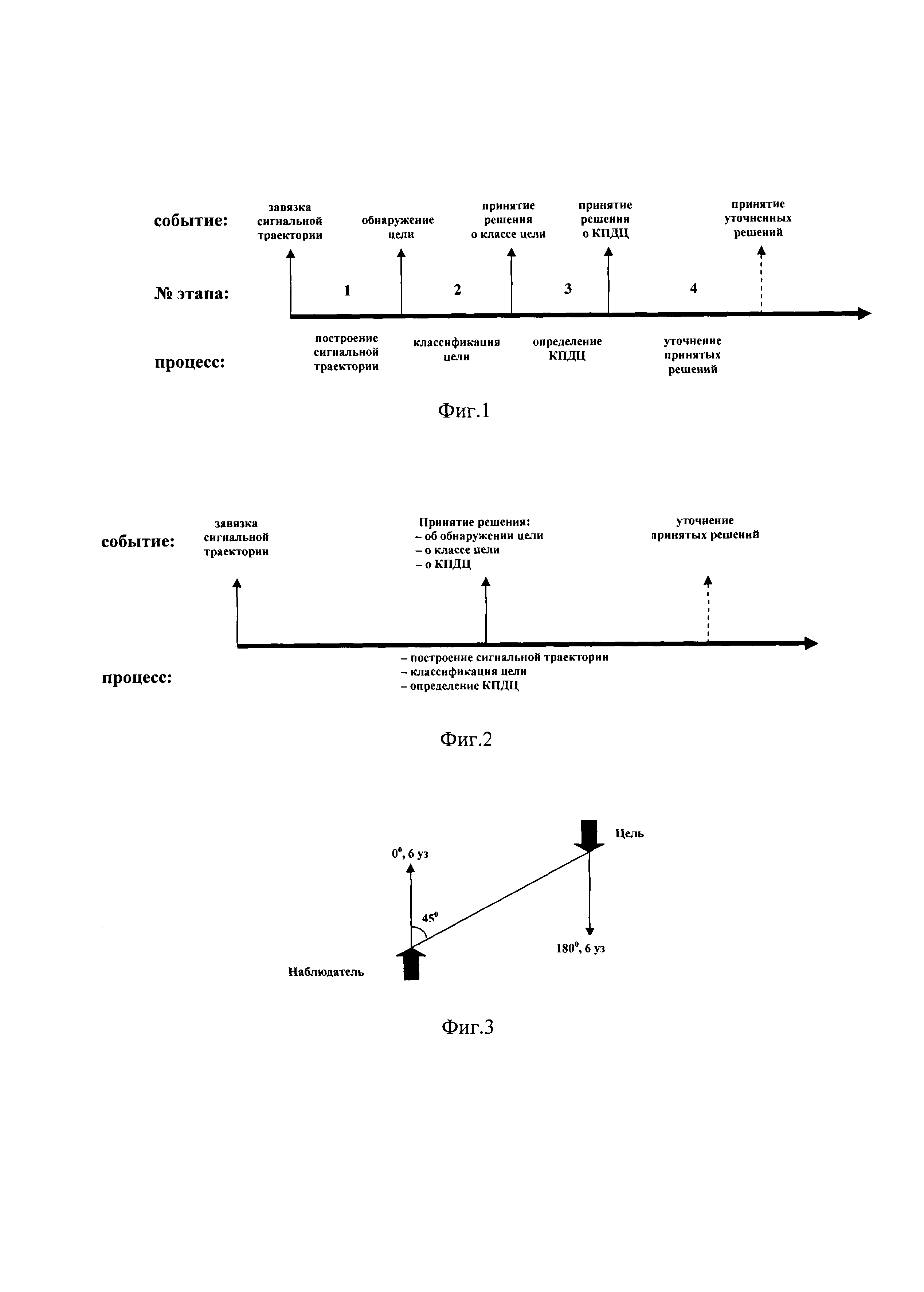

Волоконно-оптический гироскоп
Способ определения момента дифферента поплавковой гирокамеры двухстепенного поплавкового гироскопа
Способ изготовления ротора электростатического гироскопа
Гидроакустический волоконно-оптический датчик давления
Внутритрубный снаряд-дефектоскоп
Гистерезисный гиромотор
Антенна малогабаритная быстроперестраиваемая
Способ одновременной калибровки трех и более однотипных устройств с измерительными функциями без опоры на эталонное устройство или эталонный испытательный сигнал
Электромагнитно-акустический преобразователь
Способ преобразования угла поворота вала в код
Способ измерения скорости судна доплеровским лагом
Способ измерения частоты эхосигнала в доплеровском лаге
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом
Способ определения класса шумящей цели и дистанции до неё
Способ определения класса шумящей цели и дистанции до неё
Способ определения класса шумящей цели
Способ определения координат морской шумящей цели
Гидроакустическая антенна
Корабль освещения подводной обстановки

