Результат интеллектуальной деятельности: САМОХОДНАЯ УСТАНОВКА РАЗМИНИРОВАНИЯ
Вид РИД
Изобретение
Изобретение относится к самоходным бронированным машинам, предназначенным для проделывания проходов в минных полях и разминирования местности.
Известны машины для разминирования, содержащие катки-волокуши, прикрепляемыми к танкам и другим бронированным машинам (RU 2146799, F41H 11/12, 20.03.2000).
Эти машины громоздки, маломаневренны и подвержены воздействию поражающих факторов, не гарантируют безопасность экипажа и защиту машины.
Известны машины с Катковыми минными тралами, у которых катковые секции размещены по одной перед каждой гусеничной лентой бронированной базовой машины (танка), связаны с несущими рамами, прикрепленными к базовой машине посредством нижних шарнирных кронштейнов и поддерживающих тросов (RU 2146799, F41H 11/12, 20.03.2000), а также специальные машины с укрепленным днищем корпуса, обеспечивающие защиту экипажа и машины (RU 2111441, F41H 5/00, F41H 7/00, 1994).
Эти устройства не обеспечивают сплошного разминирования местности и могут использоваться только в качестве индивидуального средства защиты самой машины от мин нажимного принципа действия при выполнении задач по преодолению минных заграждений, а также имеют низкую взрывоустойчивость и ограниченный ресурс эксплуатации.
Известна также установка разминирования, содержащая двухколесное дистанционно управляемое транспортное средство с мотор-колесами и автономным источником питания в виде аккумуляторной батареи, систему видеонаблюдения и пульт дистанционного управления. Между колесами установлена втулка, вокруг которой обернут удлиненный заряд (US 8714069 В1, F41H 11/16, 06.05.2014).
Данная установка позволяет дистанционно развертывать удлиненный линейный заряд и осуществлять его подрыв, обеспечивая проходы в минных полях.
К ее недостаткам относятся ограниченная область применения, обусловленная низкой проходимостью двухколесного транспортного средства, а также отсутствие защиты оператора.
Наиболее близкой к предложенной является установка разминирования УР-77, выполненная на гусеничном шасси и предназначенная для ускоренного проделывания в ходе боевых действий проходов в противотанковых и противопехотных минных полях противника дистанционным способом. Она содержит бронированный корпус, двигатель внутреннего сгорания (ДВС), механическую трансмиссию, пусковое устройство, боекомплект с зарядами разминирования, систему управления, средства связи и наблюдения. (Установка разминирования УР-77. Практическое руководство по эксплуатации. - Военное изд.-во Минобороны России, 1993. - 104 с.).
В данной установке заряд разминирования подается на минное поле по воздуху пороховыми ракетами. После падения на грунт заряд, соединенный с установкой тормозным канатом, подтягивается на минное поле движением установки назад. Подрыв заряда осуществляется по проводам, вмонтированным в тормозной канат. В результате взрыва заряда в минном поле образуется проход, обозначенный на местности рвом.
Недостатком известной установки разминирования является невысокая скорость ее движения по пересеченной местности, не превышающая 30 км/ч. Это обусловлено снижением тяговой мощности установки разминирования при ее движении в тяжелых условиях местности, особенно во время разгонов и торможений, по причине малого запаса крутящего момента ДВС и отсутствия внутренней автоматичности механической трансмиссии, а также неточностью и запаздыванием реакции механика-водителя на изменяющиеся условия движения. К дополнительному снижению скорости приводит также разрыв потоков мощности, передаваемых от ДВС на каждую гусеницу при поворотах установки разминирования, что приводит к ее притормаживанию и заносам на поворотах.
Задачей настоящего изобретения является создание установки разминирования, способной передвигаться по пересеченной местности с более высокой скоростью.
Техническим результатом предложенного изобретения является повышение скорости движения установки разминирования по пересеченной местности.
В самоходной установке разминирования, содержащей бронированный корпус, противоминное оборудование, двигатель внутреннего сгорания (ДВС), трансмиссию, гусеничный движитель с подвеской и систему управления трансмиссией, ДВС и противоминным оборудованием, указанный технический результат достигается благодаря тому, что трансмиссия выполнена электромеханической, в состав трансмиссии входят тяговый генератор, преобразующий механическую энергию ДВС в электрическую энергию, два тяговых электродвигателя, преобразующих электрическую энергию в механическую, и две механические передачи, передающие механическую энергию от тяговых электродвигателей к ведущим колесам гусеничного движителя, причем тяговые электродвигатели выполнены синхронными вентильно-индукторными или с постоянными магнитами, а отношение передаточного отношения механических передач к радиусу ведущих колес гусеничного движителя больше 10 м-1.
В частных случаях реализации установки разминирования указанный технический результат достигается благодаря тому, что:
- гусеничный движитель выполнен с задним расположением ведущих колес, причем тяговые электродвигатели и механические передачи размещены в задней половине корпуса, а ДВС и тяговый генератор - в передней половине корпуса;
- каждая из механических передач выполнена в виде планетарного бортового редуктора и дополнительного понижающего редуктора, выполненного в виде взаимозацепленных цилиндрических шестерен, или двухдиапазонной коробки передач, или вариатора и установленного между валом тягового электродвигателя и ведущим валом бортового редуктора, причем произведение передаточных отношений планетарного бортового редуктора и дополнительного понижающего редуктора лежит в интервале от 5 до 50 при радиусе ведущих колес от 0,1 м до 0,5 м;
- роторы тяговых электродвигателей выполнены с явно выраженной магнитной несимметрией, причем у тяговых электродвигателей с постоянными магнитами средний электромагнитный момент образуется за счет суммирования момента от сил взаимодействия магнитного поля постоянных магнитов с магнитным полем, обусловленным током фазной обмотки, и момента, возникающего вследствие магнитной несимметрии ротора, причем эта несимметрия реализована, в частности, путем размещения постоянных магнитов внутри роторов по V-образной схеме;
- трансмиссия содержит два фрикционных тормоза, соединенных с ведущими или промежуточными валами бортовых редукторов, в частности - с ведущими валами бортовых редукторов;
- противоминное оборудование выполнено в виде одной или нескольких пусковых установок взрывного разминирования, приспособленных для пуска и вытягивания удлиненных зарядов с помощью твердотопливных ракет, и/или в виде минного трала, выполненного, в частности, ножевым, и/или Катковым, и/или бойковым, и/или электромагнитным;
- установка разминирования содержит водометные движители с механическим приводом от ДВС или от тяговых электродвигателей, либо с приводом от дополнительно установленных электродвигателей водометов;
- система управления выполнена автоматизированной и/или дистанционной и содержит один или группу контроллеров, содержащих силовые электронные ключи и информационную часть, реализованную на основе микроконтроллеров, а также средство связи по радиоканалу, и/или по проводной линии связи, и/или по оптоволоконному кабелю, бортовые датчики и исполнительные механизмы противоминного оборудования, ДВС, трансмиссии и водометов.
Указанные отличительные признаки независимого и зависимых пунктов формулы изобретения находятся в прямой причинно-следственной связи с достигаемым техническим результатом.
В том числе, реализация совокупности отличительных признаков независимого пункта формулы изобретения, а именно, самостоятельного признака- применение электромеханической трансмиссии и двух несамостоятельных признаков - выполнения тяговых электродвигателей синхронными вентильно-индукторными или с постоянными магнитами, а также реализация тягового фактора (отношения передаточного отношения механических передач к радиусу ведущих колес гусеничного движителя) больше 10 м-1, обеспечивает повышение скорости движения установки разминирования по пересеченной местности по следующим причинам.
Как известно, тяговое усилие гусеничной машины с электромеханической трансмиссией, содержащей 2 электродвигателя, использующихся для независимого привода каждой гусеницы, определяется по формуле

где: МЭД - выходной крутящий момент одного тягового электродвигателя; iT - передаточное отношение механических передач трансмиссии; ηT и ηГ - КПД, соответственно, механической передачи трансмиссии и гусеничного движителя; rК - радиус ведущих колес (ведущих звездочек) гусеничного движителя.
Отношение передаточного отношения механических передач к радиусу ведущих колес гусеничного движителя, именуемое также тяговым фактором, указанное в независимом пункте формулы изобретения
Соответственно, тяговое усилие, создаваемое гусеницами

Максимально возможная величина тягового усилия РТ МАХ, создаваемая гусеницами правильно сконструированной установки разминирования, имеет постоянную величину, поскольку для обеспечения движения этой установки по пересеченной местности она должна соответствовать максимально возможному сцеплению гусениц с наиболее плотным грунтом. Соответственно, максимальный момент каждого тягового электродвигателя

Из этого выражения следует, что увеличение тягового фактора iM приводит к уменьшению необходимой величины максимального момента каждого тягового электродвигателя МЭД МАХ и к соответствующему уменьшению массы тяговых электродвигателей и массы установки разминирования в целом.
Соответственно, реализация указанных трех отличительных признаков изобретения обеспечивает увеличение скорости движения установки разминирования по пересеченной местности за счет уменьшения ее массы и соответствующего снижения сопротивления передвижению, а также улучшения динамических характеристик ее разгона, торможения и поворотов за счет снижения сил инерции.
Эти отличительные признаки являются взаимосвязанными, поскольку существенное увеличение тягового фактора iM возможно только на машинах (установках разминирования) с электромеханической трансмиссией. Реализация этого признака на машине с механической, гидромеханической или гидростатической трансмиссией технически невозможна из-за ограниченной величины угловой скорости ДВС или гидромоторов.
Кроме того реализация iM>10 м-1 возможна только в случае применения в трансмиссии синхронных вентильно-индукторных электродвигателей или электродвигателей с постоянными магнитами. Обусловлено это тем, что повышение iM приводит к необходимости применения электродвигателей с широким диапазоном регулирования их скорости. Это возможно в случае применения вентильно-индукторных электродвигателей, имеющих широкую зону постоянства выходной мощности, либо электродвигателей с постоянными магнитами, у которых, в силу высокой удельной мощности, существующие ограничения их диапазона регулирования может быть скомпенсировано увеличением номинальной мощности электродвигателя при приемлемых величинах их массы.
В то же время применение, например, асинхронных электродвигателей в сочетании iM>10 м-1 невозможно, поскольку в этом случае либо не будет достигнута необходимая величина максимального тягового усилия, что недопустимо, либо масса тяговых электродвигателей получается достаточно большой, что исключает возможность повышения скорости движения установки разминирования по пересеченной местности в случае замены механической трансмиссии на электромеханическую.
Из уровня техники известно увеличение тягового фактора трансмиссий гусеничных самоходных машинах различного назначения с целью повышения их тягового усилия. В отличие от этого, взаимосвязанные отличительные признаки в предложенном изобретении - реализация электромеханической трансмиссии, выполнение тяговых электродвигателей синхронными вентильно-индукторными или с постоянными магнитами, а также увеличение тягового фактора, направлены на повышение не тягового усилия, а скорости движения машины (установки разминирования) в предположении, что максимальное тяговое усилие, создаваемое гусеницами машины, ограничено их буксованием.
Реализация отличительных признаков зависимого пункта формулы изобретения, согласно которому гусеничный движитель выполнен с задним расположением ведущих колес, тяговые электродвигатели и механические передачи размещены в задней половине корпуса, а ДВС и тяговый генератор - в передней половине корпуса, обеспечивает повышения средней скорости движения установки разминирования по пересеченной местности благодаря оптимизации положения центра ее тяжести и соответствующего улучшения устойчивости и управляемости установки разминирования, снижения сопротивления ее движению за счет обеспечения более равномерного давления движителей на грунт, а также повышения тяговой мощности за счет более высокого КПД гусеничного движителя с задним расположением ведущих колес (снижения потерь в верхних ветвях гусениц).
При реализации отличительных особенностей конструктивного исполнения механических передач, предусмотренных следующим зависимым пунктом формулы изобретения, повышение скорости движения установки разминирования по пересеченной местности достигается за счет оптимизации величины тягового фактора iM и обеспечения возможности его изменения в зависимости от условий этого движения.
Выполнение роторов тяговых электродвигателей с явно выраженной магнитной несимметрией, в частности, путем размещения постоянных магнитов внутри роторов по V-образной схеме, при которой электромагнитный момент тяговых электродвигателей образуется за счет суммирования активного и реактивного моментов, предусмотренное следующим отличительным признаком, позволяет повысить скорость движения установки разминирования за счет увеличения тяговой мощности трансмиссии в области максимальных скоростей вращения роторов.
Оснащение трансмиссии фрикционными тормозами, предусмотренное следующим отличительным признаком зависимого пункта формулы изобретения, позволяет повысить скорость движения установки разминирования по пересеченной местности за счет снижения ограничений на эту скорость из условия обеспечения безопасности этого движения. Это обусловлено более эффективным торможением фрикционными тормозами по сравнению с динамическим торможением тяговыми электродвигателями.
Отличительные признаки последнего зависимого пункта формулы изобретения предусматривают реализацию в системе управления установки разминирования указанных в этом пункте технических решений, обеспечивающих реализацию функций автоматизированного и/или дистанционного управления этой установкой.
В случае реализации дистанционного управления достижение указанного технического результата обеспечивается за счет исключения экипажа установки разминирования и соответствующих ограничений на величину скорости движения и ускорений установки разминирования из условий обеспечения безопасности экипажа.
При движении установки разминирования по пересеченной местности происходит изменение сопротивления движению установки разминирования в широких пределах, превышающих запас крутящего момента ДВС. Поэтому реализация автоматизированной системы управления обеспечивает увеличение скорости движения установки разминирования в этих условиях за счет стабилизации загрузки ДВС и соответствующего увеличения тяговой мощности, а также предотвращения недопустимого большого буксования гусениц и заносов установки разминирования на поворотах.
В установке разминирования могут быть реализованы не только отличительные признаки независимого пункта формулы изобретения, но и различные альтернативные отличительные признаки зависимых пунктов формулы изобретения в их любом сочетании, причем от количества реализованных отличительных признаков зависит уровень достижения указанного технического результата.
Техническая сущность и принцип действия предложенного устройства поясняются чертежом, на котором в качестве примера осуществления заявляемого изобретения показана упрощенная функциональная схема установки разминирования.
Самоходная установка разминирования выполнена в виде плавающей гусеничной однозвенной машины.
Она имеет бронированный водонепроницаемый несущий корпус, водоизмещение которого обеспечивает ее поддержание на плаву в надводном положении. Благодаря его водонепроницаемости возможно также обеспечить передвижение установки разминирования в полностью погруженном положении. Корпус служит для размещения и защиты экипажа, агрегатов и механизмов (составных частей) установки разминирования. С целью достижения требуемой степени защищенности в условиях ограничений по массе он может быть выполнен из легких броневых сплавов.
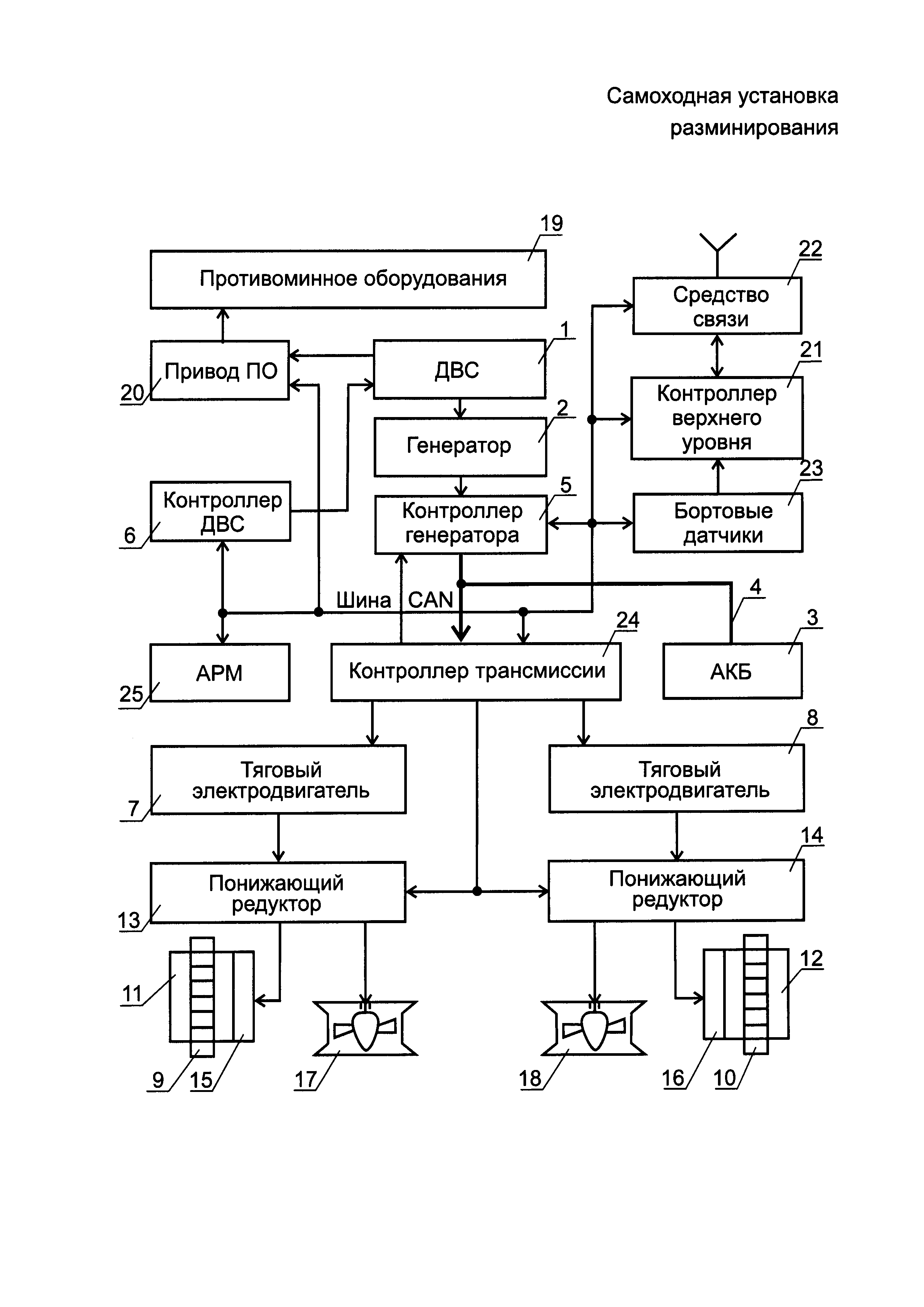
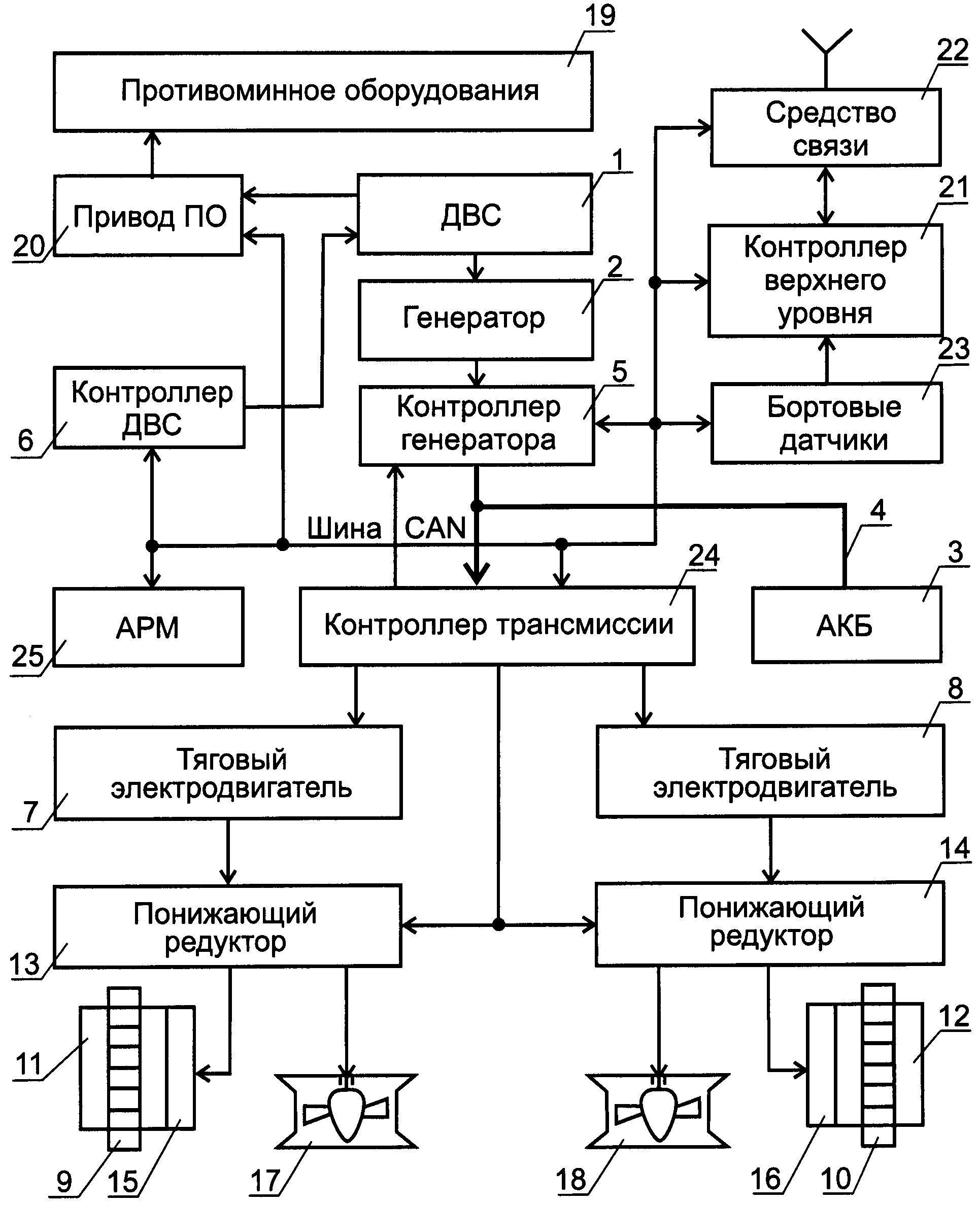
Бортовой источник энергии содержит двигатель внутреннего сгорания (ДВС) 1 (с обслуживающими системами питания топливом и воздухом, смазки, охлаждения, подогрева и запуска) и соединенный с ним генератор 2, либо аккумуляторную батарею (АКБ) 3, либо одновременно ДВС с генератором и АКБ.
ДВС соединен с генератором 2 непосредственно или через мультипликатор, упругую муфту и т.п. Генератор осуществляет преобразование механической энергии ДВС в электрическую энергию, передаваемую на силовые шины 4 с помощью контроллера генератора 5.
На установке разминирования может быть установлен генератор любого типа - асинхронный, вентильный с постоянными магнитами на роторе, вентильно-индукторный, синхронный с вращающимся выпрямителем и т.д. с жидкостным или воздушным охлаждением.
Контроллер генератора 5, осуществляющий преобразование переменного выходного напряжения генератора 2 в постоянное напряжение на силовых шинах 4 и, в случае необходимости, возбуждение генератора, может именоваться также силовым выпрямителем, инвертором или преобразователем. Он может осуществлять регулирование, в том числе стабилизацию, напряжения на силовых шинах 4 путем изменения углов открытия тиристоров в силовом выпрямителе, либо изменения тока возбуждения или самовозбуждения генератора.
Контроллер генератора выпрямителя 5 может быть размещен в одном корпусе с генератором, например, в виде встроенного выпрямителя, либо выполнен в виде отдельного устройства.
Если контроллер генератора представляет собой инвертор или преобразователь, осуществляющий коммутацию обмоток генератора 2, то генератор может работать в режиме электродвигателя при запуске ДВС и при торможении установки разминирования двигателем.
Управление величиной напряжения на силовой шине 4 может осуществляться также путем изменения угловой скорости ДВС с помощью контроллера ДВС 6 или органов ручного управления двигателем.
К силовой шине 4 может быть подключен емкостный или инерциальный накопитель энергии, реализованный, соответственно, на основе конденсаторов или вращающегося маховика, а также тормозной резистор с соответствующим устройством управления - контроллером тормозного резистора (на чертеже условно не показан), ограничивающий величину напряжения на силовых шина 4 и поглощение электрической энергии при динамическом торможении установки разминирования тяговыми электродвигателями 7, 8 во время ее движения на затяжном спуске.
В приведенном примере используется последовательная кинематическая схема моторно-трансмиссионной установки установки разминирования, которая исключает механическую связь ДВС с гусеничным движителем.
В этом случае валы тяговых электродвигателей 7, 8 через механические передачи непосредственно или через дополнительные передаточные устройства (муфты, карданные валы и т.д.) соединены с ведущими колесами (звездочками) 9, 10 гусеничного движителя. Указанные механические передачи могут иметь фиксированные, ступенчато изменяемые (двухступенчатые или многоступенчатые коробки передач) или плавно изменяемые (вариаторы) передаточные отношения.
Предпочтительным вариантом реализации механических передач является применение планетарных бортовых редукторов 11, 12 и соединенных с ними дополнительных понижающих редукторов 13, 14, установленных между валами тяговых электродвигателей 7, 8 и ведущими валами бортовых редукторов. Это соединение может осуществляться непосредственно, с помощью карданных валов, муфт и т.д.
Понижающие редукторы 13, 14 могут быть выполнены в виде взаимозацепленных цилиндрических шестерен, двухдиапазонной или многодиапазонной коробки передач, вариатора и т.д.
Произведение передаточных отношений планетарного бортового редуктора и дополнительных понижающих редукторов может быть выбрано, например, в интервале от 5 до 50 при радиусе ведущих колес от 0,1 м до 0,5 м.
В частности, при радиусе ведущих колес 0,25…0,3 м и передаточном отношении бортовых редукторов 5…6 передаточное отношение дополнительных понижающих редукторов может быть выбрано в интервале 2,5…3,5.
В этом случае отношение передаточного отношения механических передач iT к радиусу ведущих колес гусеничного движителя rК, именуемое тяговым фактором iM, составляет: iM=iT/rК=41,7…84,0 м-1, т.е. больше 10 м-1.
Если используется прямое соединение тяговых электродвигателей 7, 8 с бортовыми редукторами, то их передаточное отношение также может быть выбрано в диапазоне 5…6 при радиусе ведущих колес 0,25…0,3 м. При этом тяговый фактор имеет значение: iM=iT/rК=(5…6)/(0,25…0,3 м-1)=16,7…24 м-l, т.е. больше 10 м-1.
Возможно также применение двухскоростных планетарных бортовых редукторов 11, 12, соединенных с тяговыми электродвигателями через дополнительные редукторы 13, 14, либо непосредственно. В последнем случае, если радиус ведущих колес также лежит в интервале 0,25…0,3 м, для получения необходимой величины тягового фактора (iM>10 м-1) передаточное отношение двухступенчатых планетарных редукторов должно быть не менее 33,3…40,0.
Изменение (переключение) передаточного отношения механических передач- дополнительных понижающих редукторов или бортовых планетарных редукторов, если оно предусмотрено, осуществляется оператором (механиком-водителем) вручную или автоматически с помощью зубчатых муфт, фрикционов и т.п.с соответствующими электромеханическими, электрогидравлическими или электропневматическими исполнительными механизмами.
Торможение установки разминирования может осуществляться путем перевода тяговых электродвигателей 7, 8 в режим динамического торможения, и/или с помощью дополнительно установленных фрикционных тормозов 15, 16, соединенных с ведущими или промежуточными валами механических передач.
Тяговые электродвигатели могут синхронными вентильно-индукторными, именуемыми также вентильными реактивными, вентильными индукторно-реактивными электродвигателями (ВРД, ВИД, ВИРД) с самовозбуждением или с независимым возбуждением, не имеющими постоянных магнитов и обмоток на роторе. В зарубежной технической литературе они именуются электродвигателями с переменным магнитным сопротивлением «Switched Reluctance Motor» (SRM).
Возможно применение синхронных электродвигателей с постоянными магнитами в роторе и радиальным магнитным потоком, именуемых в зарубежной литературе «Permanent Magnet Synchronous Motor» (PMSM) или «Brushless Direct Current Motor» (BLDC).
Возможно также применение электродвигателей с магнитами на дисковом роторе и аксиальным магнитным потоком (AFM), с магнитами на роторе и поперечным магнитным потоком (TFM), с комбинированным (гибридным) электромагнитным и магнитоэлектрическим возбуждением «Hybrid excitation flux switching motor» (HEFSM) и т.д.
Ротор тягового электродвигателя любой конструкции, использующийся в трансмиссии, с целью расширения диапазона регулирования скорости вращения и соответствующего повышения скорости движения установки разминирования, выполнен с явно выраженной магнитной несимметрией по его продольной и поперечной осям.
Если используется электродвигатель с постоянными магнитами, то его полюса сформированы постоянными магнитами и магнитными концентраторами таким образом, что средний электромагнитный момент тягового электродвигателя образуется за счет суммирования момента от сил взаимодействия магнитного поля постоянных магнитов с магнитным полем, обусловленным током фазной обмотки, и момента, возникающего вследствие магнитной несимметрии ротора. В частности, постоянные магниты размещены внутри ротора по V-образной схеме.
Тяговые электродвигатели с радиальным или поперечным магнитным потоком могут быть выполнены как с внутренним, так и внешним ротором.
Гусеничный движитель установки разминирования, с целью повышения его КПД, выполнен с задним расположением ведущих колес. При этом, для оптимизации положения центра тяжести установки разминирования, тяговые электродвигатели и механические передачи размещены в задней половине ее корпуса, а ДВС и тяговый генератор - в передней половине корпуса. Возможно также размещение тяговых электродвигателей 7, 8 вместе с бортовыми редукторами 15, 16 внутри обвода гусениц.
Гусеничный движитель может иметь пневматическую подвеску с электрогидравлическим, электропневматическим или электромеханическим устройством регулирования клиренса машины с фиксируемыми рабочими положениями.
Гусеничный движитель предназначен прежде всего для преобразования вращательного движения выходных валов механических передач в поступательное движение машины на суше. Движение на плаву может обеспечиваться за счет перематывания гусениц.
Для повышения скорости движения на воде в кормовой части машины может быть установлен водоходный движитель, например, водометы 17, 18, а также рули, обеспечивающие реализацию водоходного движителя с изменяемым вектором тяги.
Для их привода от тяговых электродвигателей 7, 8 используются понижающие редукторы 13, 14, имеющие один входной и два выходных вала, в общем случае с различными передаточными отношениями, а также управляемые или неуправляемые зубчатые или фрикционные муфты с ручным, электромеханическим или электрогидравлическим (автоматизированным) управлением, карданные валы и т.д.
Кроме привода от тяговых электродвигателей 7, 8, возможна также реализация механического, гидрообъемного (гидростатического) или электромеханического привода водометов 17, 18 непосредственно от ДВС, от гусеничного движителя или от дополнительно установленного электродвигателя (электродвигателей) водометов. Такой привод содержит, в частности, механическую передачу (редуктор, коробку передач и т.д.) с фиксированным или переменным (переключаемым, управляемым) передаточным отношением, а также зубчатые или фрикционные муфты с электромагнитным, электрогидравлическим или электропневматическим, управлением, позволяющие отключить водометы при движении установки разминирования на суше.
Если установка разминирования выполнена плавающей, то она дополнительно оснащена водоотражательным (волноотражательным) щитом с приводом любого вида и водооткачивающим устройством, содержащим, в частности, отсечной клапан, водозаборную трубу с обратным клапаном и механический, пневматический, или гидравлический привод от ДВС, либо электромеханический привод (электродвигатель помпы с контроллером), подключенный к силовым шинам 4.
На установке разминирования может быть реализован режим «тихого хода» при ее движении при неработающем ДВС как по суше, так и на воде с питанием тяговых электродвигателей 7, 8 от аккумуляторных батарей 3.
Функциональным (рабочим) оборудованием установки разминирования является противоминное оборудование 19, выполненное в виде одной или нескольких пусковых установок взрывного разминирования (ПУ) с боекомплектом, выполненным в виде удлиненных зарядов с твердотопливными (пороховыми) буксирными ракетами, и/или минного трала.
ПУ, обеспечивающая пуск и вытягивания удлиненных зарядов с помощью твердотопливных ракет, может содержать, в частности, платформу, опору, установленную на платформе, направляющую, закрепленную на опоре с возможностью углового перемещения, привод 20 для перемещения направляющей, контейнеры для гибких удлиненных зарядов разминирования, силовых шнуров и твердотопливных (пороховых) ракетных двигателей. Направляющих и связанных с ней механизмов ПУ может быть несколько.
Заряд установки разминирования представляет собой ракету с прикрепленным к ней длинным тросом и состоит из секций, каждая из которых содержит удлиненные заряды взрывчатого вещества, узлы сгибов, а также концевые узлы соединения и передачи детонации.
ПУ и заряды разминирования в транспортном положении установки разминирования могут быть размещены как снаружи, так и внутри ее бронированного корпуса.
В последнем случае они сверху закрыты бронированными крышками (люками) с шарнирами, которые при переводе установки разминирования из транспортного состояния в рабочее открываются вручную оператором или в автоматизированном режиме с помощью электромеханического, гидравлического, электрогидравлического или пневматического привода 20. Направляющие ПУ выдвигаются из корпуса с их поворотом в случае необходимости с помощью электромеханического, электрогидравлического или гидравлического привода 20. Энергия для работы этого привода может поступать либо непосредственно от ДВС (показано на чертеже), либо от силовых шин 4 через дополнительный электродвигатель (в случае электромеханического привода). Гидравлический или электрогидравлический привод содержит гидравлический насос, связанный с ДВС или с дополнительно установленным электродвигателем, а также электрогидравлические распределители и гидравлические цилиндры или гидромоторы.
Привод 20 может обеспечивать стабилизацию положения направляющих ПУ в одной или двух плоскостях. В этом случае на направляющих ПУ установлены датчики их положения, а сам привод выполнен электрогидравлическим или электромеханическим на основе малоинерционных электродвигателей.
Противоминное оборудование 19 в дополнение к пусковой установке взрывного разминирования или вместо нее может быть выполнено в виде минного трала любой конструкции или комбинации минных тралов. В частности, в виде:
- каткового минного трала, осуществляющего расчистку минных заграждений путем передачи давления стальных катков на мины нажимного действия;
- бойкового минного трала, представляющего собой располагающийся над грунтом горизонтальный барабан с механическим, электромеханическим или гидростатический приводом, на котором крепятся цепи с ударными наконечниками и действующего по принципу ударов наконечников по грунту, подрывающих или отбрасывающих мины;
- ножевого колейного минного трала, выполненного в виде навесного оборудования установки разминирования и содержащего две ножевые секции, сцепное устройство, электрооборудование, пневмооборудование и защитный экран и действующего по принципу выглубления мин и отбрасывания их за пределы проекции гусениц;
- электромагнитного минного трала или комплекса (системы) противоминной электромагнитной защиты, выполненного в виде приставок к колейным минным тралам или имеющего собственные элементы размещения и крепления на корпусе установки разминирования, и содержащего электромагниты, искажающие магнитную сигнатуру установки разминирования и заставляющие мины срабатывать вне ее проекции, либо блокирующие работу их взрывателей, либо притягивающие мины к нижней поверхности этого трала и удерживающие на ней.
В дополнение к этим минным тралам может быть установлено устройство траления противоднищевых или противобортовых мин (УТПМ, УТПБМ), содержащее корпус, штанги и предохранительное звено. Принцип его работы заключается в воздействии штанги на штыревой взрыватель, который наклоняется и мина приводится у взрыву.
Противоминное оборудование 19 может также содержать комбинацию описанных минных тралов. Например, может быть выполнено в виде инженерного танкового минного трала типа ТМТ-К или его аналога, предназначенного для разведки и проделывания прохода в противотанковых минных полях и сплошного разминирования местности и состоящего из каткового оборудования нажимного действия с резаками-корчевателями, сетевой приставки, устройства траления противобортовых мин УТПБМ и электромагнитной приставки-трала (ЭМТ).
Установка разминирования может содержать также различное вооружение и устройства защиты от высокоточного оружия, оружия массового поражения, противотанковых средств и пожара.
В частности, на установке разминирования может быть установлен выносной боевой модуль с дистанционным управлением и установленным на нем пулеметом, стабилизированный двух плоскостях и оснащенный лазерным дальномером и телевизионным и тепловизионным прицелом. Этот модуль может использоваться для самообороны машины, для наблюдения при управлении ее движением, а также для расстрела мин, обнаруженных любым способом.
Возможно оснащение установки разминирования устройством оптико-электронного противодействия (КОЭП), содержащим датчики, улавливающие лазерное излучение приборов наведения, формирующим предупреждающие сигналы для экипажа и/или оператора дистанционного управления, а также осуществляющим автоматическую постановку помех наведению современных противотанковых средств, например, укрытие машины дымовым облаком. С этой целью на корпусе машины могут устанавливаться гранатометы для стрельбы дымовыми гранатами.
Возможна установка оборудования для радиационной и химической разведки. В этом случае установка разминирования содержит датчики и средства радиационной (биологической) и химической защиты, а система управления осуществляет контроль и обнаружение радиоактивного излучения и химического заражения местности и формирование информационных предупреждающих сигналов для экипажа или оператора дистанционного управления и сигналов управления исполнительными механизмами средств защиты.
Установка разминирования может быть оснащена средствами автоматического обнаружения и тушения пожаров, содержащей датчики пожара (термодатчики, датчики дыми и т.д.), контроллер системы пожаротушения и баллоны с огнетушащим составом, например, «Хладоном 114В2».
Дополнительно может быть установлено грузоподъемное устройство, выполненное в виде крана-манипулятора (крана без противовеса) с приводом любого типа, обеспечивающее возможность погрузки на установку разминирования боекомплекта ПУ (удлиненных зарядов) и боевого модуля (патронов).
Каждое из устройств оптико-электронного противодействия (КОЭП), радиационной и химической защиты, пожаротушения, откачки воды, прогрева и запуска ДВС, управления грузоподъемным устройством (краном-манипулятором) и т.д. может быть выполнено в виде отдельного устройства (комплекса, подсистемы, системы), либо интегрировано в систему управления установкой разминирования.
Эта система может именоваться также системой контроля, защиты и управления, системой электрооборудования и т.д. В общем случае она включает в себя высоковольтную и низковольтную части. Ее информационную основу составляет контроллер верхнего уровня 21, который может именоваться также цифровым вычислителем, блоком управления, бортовой ЭВМ, информационно-управляющим блоком и т.п.
В состав системы управления входят также контроллер ДВС 6, контроллер генератора 5, средство связи 22 со стационарным постом управления установкой разминирования по радиоканалу, проводной линии связи или по оптоволоконному кабелю, бортовые датчики 23, контроллер трансмиссии 24 и автоматизированное рабочее место (АРМ) экипажа - оператора или двух операторов (механика-водителя, оператора-наводчика, командира, и т.п.) 25, размещенное в обитаемом отделении корпуса.
В состав АРМ входят органы управления движением установки разминирования по суше и на плаву (джойстики, штурвал, рычаги и т.п.), органы управления приводом 20 противоминного оборудования 19, грузоподъемным устройством, боевым модулем, водооткачивающим средством, водоотражательным (волноотражательным) щитом, световыми приборами и т.д., а также дисплей и набор световых, звуковых или речевых индикаторов для отображения режимов работы установки разминирования, а также диагностических и аварийных сигналов.
Для управления противоминным оборудованием 19 (его приводом 20) и боевым модулем возможна установка отдельных пультов, выполненных автономными или входящими в состав АРМ.
Все контроллеры (электронные блоки) могут быть выполнены в разных корпусах, либо в общем корпусе в виде единого контроллера (электронного блока, управляющего блока, шкафа управления, бортовой ЭВМ и т.п.). Каждый из них в общем случае содержит информационную часть, реализованную на основе микроконтроллера или цифрового сигнального процессора, интерфейсные схемы, обеспечивающие согласование входных/выходных цепей микроконтроллеров с линиями связи и, в случае необходимости, с бортовыми датчиками 23, а также силовую часть, реализованную на силовых транзисторах и/или транзисторных модулях и обеспечивающую формирование и передачу сигналов необходимой мощности на обмотки генератора 2 и тяговых электродвигателей 7, 8, исполнительные механизмы ДВС, противоминного оборудования 19 (его привода 20), понижающих редукторов 13, 14, тормозов 15, 16, боевого модуля, водооткачивающего средства, волноотражательного щита, грузоподъемного оборудования, устройств автоматического пожаротушения, радиационной и химической защиты и т.д.
Контроллеры могут именоваться также блоками управления, управляющими устройствами, блоками входов и нагрузок, информационно-управляющими блоками или устройствами и т.д.
Контроллер трансмиссии 24, который может именоваться силовым или частотным преобразователем, инвертором и т.д., предназначен для преобразования постоянного напряжения на силовых шинах 4 в переменное напряжение или в однополярные импульсы, поступающие на фазные обмотки тяговых электродвигателей 7, 8. Силовые электронные ключи, входящие в его состав, выполнены преимущественно в виде модулей, реализованных на основе IGBT (БТИЗ) транзисторов, и имеют гальванически развязанные драйверы этих транзисторов (модулей). Для двух тяговых электродвигателей 7, 8 может использоваться один двухканальный контроллер (инвертор, преобразователь, коммутатор) трансмиссии 24 (показано на чертеже), либо отдельные контроллеры. Возможна также установка нескольких контроллеров для работы с одним тяговым электродвигателем, например, при дроблении мощности по секциям его статора.
Для управления противоминным оборудованием 19 и его приводом 20 может использоваться контроллер, встроенный в это оборудование или в этот привод, либо отдельный контроллер.
В состав бортовых датчиков 23 в общем случае входят акселерометры и гироскопы бесплатформенной системы инерциальной навигации, ультразвуковые, стерео-визуальные (неподвижно установленные или дистанционно управляемые видеокамеры с приводами наведения), курсо-одометрические, радиолокационные, магнитометрические датчики, датчики продольного и поперечного крена машины, датчики углового положения противоминного оборудования, приемники глобальной спутниковой навигации, а также датчики радиоактивного излучения и химического заражения, пожара и датчики рабочих параметров трансмиссии, ДВС, противоминного оборудования, водооткачивающего средства (помпы), водометов, грузоподъемного устройства и боевого модуля.
Контроллеры (электронные блоки) системы управления обладают ресурсами (вычислительной мощностью, объемом памяти программ и данных, аналого-цифровыми преобразователями и т.д.), достаточными для обработки выходных сигналов бортовых датчиков 23 и последующей реализации алгоритмов ручного, автоматизированного или дистанционного управления движением установки разминирования и ее противоминным оборудованием. При этом, в режиме автоматизированного и/или дистанционного управления контроллеры в случае необходимости обеспечивают возможность отслеживания окружающей обстановки и определения текущего местоположения установки разминирования на местности.
Линии передачи информационных сигналов между контроллерами 5, 6, 21 и 24, бортовыми датчиками 23, АРМ 25, средством связи 22, боевым модулем (при его наличии) и другими составными частями системы управления могут быть выполнены с использованием стандарта промышленной сети CAN (Controller Area Network). Возможно применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п.Возможно также соединение между собой отдельных составных частей системы управления, в том числе их подключение к контроллерам и бортовым датчикам 23, с помощью отдельных проводов.
Работа установки разминирования происходит следующим образом.
Перед началом работы установки разминирования в ее корпус вручную или с помощью грузоподъемного устройства (крана-манипулятора) загружаются боекомплекты пусковой установки взрывного разминирования и боевого модуля.
Первичным источником энергии для движения установки разминирования, работы противоминного и прочего оборудования является бортовой источник энергии - ДВС с генератором 2 и/или аккумуляторные батареи 3.
Контроллер верхнего уровня 21, выполняющий функции ведущего устройства системы управления, работает по программе, предварительно записанной в его энергонезависимую память и координирует работу всех составных частей системы управления, осуществляя информационное взаимодействие с ними по шине CAN.
Запуск ДВС осуществляется оператором (механиком-водителем) с помощью ключа запуска ДВС, входящего в состав АРМ 25, либо дистанционно с использованием средства связи 22. Сигнал запуска ДВС от контроллера верхнего уровня (цифрового вычислителя) 21 по шине CAN поступает на контроллер ДВС 6, осуществляющий управление его стартером и подачей топлива.
В начале движения установки разминирования оператор (механик-водитель) с помощью АРМ 25 или оператор дистанционного управления задает ее скорость, направление движения, маршрут (траекторию движения) или его конечную точку.
Перед движением установки разминирования на воде дополнительно механиком-водителем или оператором дистанционного управления формируются сигналы подъема водоотражательного (волноотражательного) щитка.
Сигналы управления движением машины по шине CAN поступают на контроллер силовой трансмиссии 24, осуществляющий управление тяговыми электродвигателями 7, 8, которые через понижающие редукторы 13, 14 и бортовые редукторы 11, 12 приводят в движение гусеницы.
При движении установки разминирования по пересеченной местности, благодаря реализации электромеханической трансмиссии с синхронными вентильно-индукторными тяговыми электродвигателями или с тяговыми электродвигателями с постоянными магнитами, обладающими широким диапазоном регулирования скорости и/или высокой удельной мощностью, в сочетании с высоким значением тягового фактора трансмиссии (больше 10 м-1), достигается повышение скорости и движения установки разминирования при сохранении необходимой величины тягового усилия, ограниченного сцеплением гусениц с грунтом.
При этом повышение скорости движения установки разминирования достигается благодаря снижению ее массы и соответствующего улучшения ее подвижности и снижения сопротивления передвижению.
При движении установки разминирования по пересеченной местности из-за наличия подъемов и спусков, неровностей трассы движения и изменения грунтовых условий происходит изменение сопротивления ее движению в широких пределах, превышающих запас крутящего момента ДВС. В этом случае контроллер трансмиссии 24 осуществляет автоматическое изменение крутящего момента тяговых электродвигателей 7, 8 из условия обеспечения равенства средней величины суммарной мощности, потребляемой тяговыми электродвигателями 7, 8 и величины максимальной выходной мощности генератора 2. При этом контроллер генератора 5 и контроллер ДВС 6 обеспечивают работу ДВС 1 в режиме максимальной выходной мощности. Одновременно контроллер верхнего уровня 21 с помощью бортовых датчиков 23 контролирует уровень буксования левой и правой гусениц и по шине CAN передает сигналы управления на контроллер трансмиссии 24, обеспечивая предотвращение недопустимо большого буксования гусениц.
Благодаря этому достигается максимально возможная тяговая мощность установки разминирования и, соответственно, максимально возможная скорость ее движения по пересеченной местности.
Во время поворотов установки разминирования контроллеры 21 и 24, контролируя ее угловые ускорения и буксование гусениц, обеспечивают управление тяговыми электродвигателями 7, 8 без разрыва потоков мощности, передаваемых на ведущие колеса 9, 10, из условия сохранения модуля вектора скорости центра масс установки разминирования во время ее поворота и предотвращения ее заноса. Реализация этого алгоритма управления, в сочетании с обеспечением рационального положения этого центра масс за счет указанного выше размещения ДВС и составных частей трансмиссии в корпусе установки разминирования, также приводит к увеличению скорости ее движения на пересеченной местности.
Если диапазон регулирования скорости тяговых электродвигателей 7, 8 недостаточен для обеспечения бесступенчатого регулирования скорости движения установки разминирования во всем диапазоне ее скоростей, то дополнительное повышение скорости движения установки разминирования возможно также за счет изменения передаточного отношения понижающих редукторов 13, 14. В этом случае первая передача с повышенным передаточным отношением позволяет получить необходимое максимальное тяговое усилие установки разминирования с тяговыми электродвигателями, имеющими меньшую массой. Затем, по мере увеличения скорости движения установки разминирования, осуществляется уменьшение передаточного отношения понижающих редукторов 13, 14, благодаря чему для достижения необходимой скорости движения машины требуется меньшая скорость вращения роторов тяговых электродвигателей. Поскольку максимальная скорость вращения роторов ограничена, применение механических передач (коробок передач) 7, 8 с переменным передаточным отношением позволяет повысить максимальную скорость движения машины.
Если установка разминирования движется на воде, то для обеспечения ее движения с повышенной скоростью контроллер верхнего уровня 21 и контроллер трансмиссии 24 осуществляют включение и управление работой приводов и рулей водометов 17, 18. Это управление может осуществляться дистанционно, в ручном или в автоматизированном режиме.
При управлении из обитаемого отсека механик-водитель отслеживает окружающую обстановку и, в случае необходимости, изменяет направление и скорость движения установки разминирования.
При работе в режиме автоматизированного или дистанционного управления контроллер верхнего уровня 21 путем обработки выходных сигналов бортовых датчиков 23 осуществляет отслеживание окружающей обстановки установки разминирования, определяет ее текущее местоположения, а также формирует и передает по шине CAN сигналы управления движением этой установки. В случае необходимости - в обход выявленных препятствий.
При потере связи или в случае невозможности достижения конечной точки маршрута при движении машины в режиме дистанционного управления контроллер верхнего уровня 21 формирует сигналы управления движением установки разминирования из условия ее возврата по ранее пройденному пути до восстановления связи или в начальную точку траектории ее движения.
Во время движения установки разминирования, а также во время ее остановок, оператором дистанционного управления или механиком-водителем осуществляется управление противоминным оборудованием. В частности, опускание и подъем секций минного трала из рабочего положения в походное и обратно с помощью пневмосистемы трала, питаемой от компрессора машины, либо привода другого типа.
Контроллер верхнего уровня 21 обеспечивает также автоматическое включение в работу имеющихся средств противодействия работе оптических и оптико-электронных средств обнаружения, наблюдения и наведения противника, средств радиационной и химической защиты и тушения пожара.
Если машина движется на воде, то контроллер 21 дополнительно осуществляет непрерывный контроль наличия воды внутри корпуса установки разминирования с помощью соответствующего датчика 23 и, в случае ее обнаружения, формирует и передает по шине CAN сигнал автоматического включение привода водооткачивающего устройства (помпы).
Одновременно контроллер верхнего уровня 21 с участием других контроллеров и бортовых датчиков 23 осуществляет диагностирование технического состояния и контроль режимов работы узлов и агрегатов установки разминирования, обеспечивает их защиту от аварийных режимов путем передачи аварийных сигналов отключения на соответствующие исполнительные механизмы, а также путем формирования предупреждающих информационных сигналов, поступающих на АРМ 25 по шине CAN и на внешний пост дистанционного управления через средство связи 22.
Если противоминное оборудование 19 выполнено в виде пусковой установки взрывного разминирования (ПУ), то после вывода установки разминирования на нужную позицию и определения места для проделывания проходов в минных полях оператор дистанционного управления или оператор-наводчик с АРМ 25 переводит ПУ из походного положения в рабочее. При этом с помощью электромеханического, электрогидравлического или гидравлического привода открываются люки (крышки) корпуса, направляющие ПУ выдвигаются (поднимаются) из корпуса и занимают рабочее положение с нужным углом возвышения.
Далее по команде с пульта дистанционного управления или с АРМ 25 производится прицеливание и пуск заряда разминирования. Возможен одновременный пуск двух или более зарядов с ПУ, имеющей несколько направляющих с соответствующими приводами 20.
Ракета сходит с направляющей и летит по баллистической траектории, вытягивая за собой гибкий заряд разминирования. После того, как ракета с зарядом удаляется от установки разминирования на длину, определяемую длиной тормозного каната, происходит падение заряда на минное поле и отсечка ракетного порохового двигателя. Оператор дистанционного управления или механик-водитель подает машину назад для того, чтобы выровнять заряд разминирования в прямую линию или подтянуть его на минное поле. После этого подается команда на подрыв заряда и отстрел тормозного каната. После окончания данного цикла становится возможной перезарядка пускового устройства и пуск второго заряда.
Обезвреживание мин происходит в результате срабатывания их собственных взрывателей под действием ударной волны, образующейся при взрыве удлиненного заряда разминирования. Мины, защищенные от подрыва взрывом, выбрасываются за пределы разминированного прохода.
При этом уничтожение противопехотных осколочных мин натяжного действия обеспечивается лишь частично, когда фрагменты заряда, грунт, камни, разлетающиеся при взрыве натягивают датчик цели. Мины со взрывателем двукратного нажатия после воздействия взрыва могут остаться работоспособными. Аналогично дело обстоит с магнитными минами, хотя их взрыватели могут быть повреждены взрывной волной.
Для гарантированного уничтожения этих мин установка разминирования направляется на разминированный проход с приведенными в рабочее положение минными тралами.
В случае израсходования всего боекомплекта направляющие ПУ опускаются в корпус установки разминирования и она уходит на пункт перезарядки. Перезарядка осуществляется вручную или с помощью крана-манипулятора.
Для специалистов в данной области техники также понятно, что кроме описанных вариантов установки разминирования возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины

