Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ РЕЙКИ ТРУБОПРОКАТНОГО СТАНА С ЭЛЕКТРОПРИВОДОМ ПО СХЕМЕ ГЕНЕРАТОР - ДВИГАТЕЛЬ
Вид РИД
Изобретение
Известны устройства для автоматического торможения зубчатой рейки трубопрокатного стана, электропривод которого питается по схеме генератор - двигатель, управляемой командоаппаратом и схемой управления, содержащие датчики положения рейки.
Предлагаемое устройство отличается от известных тем, что оно снабжено связанным с силовой цепью электропривода датчиком торможения, выполненным в виде замкнутого сердечника со считывающей (выходной) обмоткой, и блоком с логической схемой, к входам которой подключены датчики положения и считывающая обмотка датчика торможения, а к выходу - система управления (например, реле защиты).
Благодаря этому повышается безопасность работы стана путем аварийного торможения рейки при неисправности командоаппарата.
Кроме того, датчик торможения снабжают подмагничивающей обмоткой, которая подключена к источнику постоянного тока в такой полярности, чтобы создаваемый ею магнитный поток имел направление, противоположное направлению магнитного потока, создаваемого током нагрузки перед началом торможения.
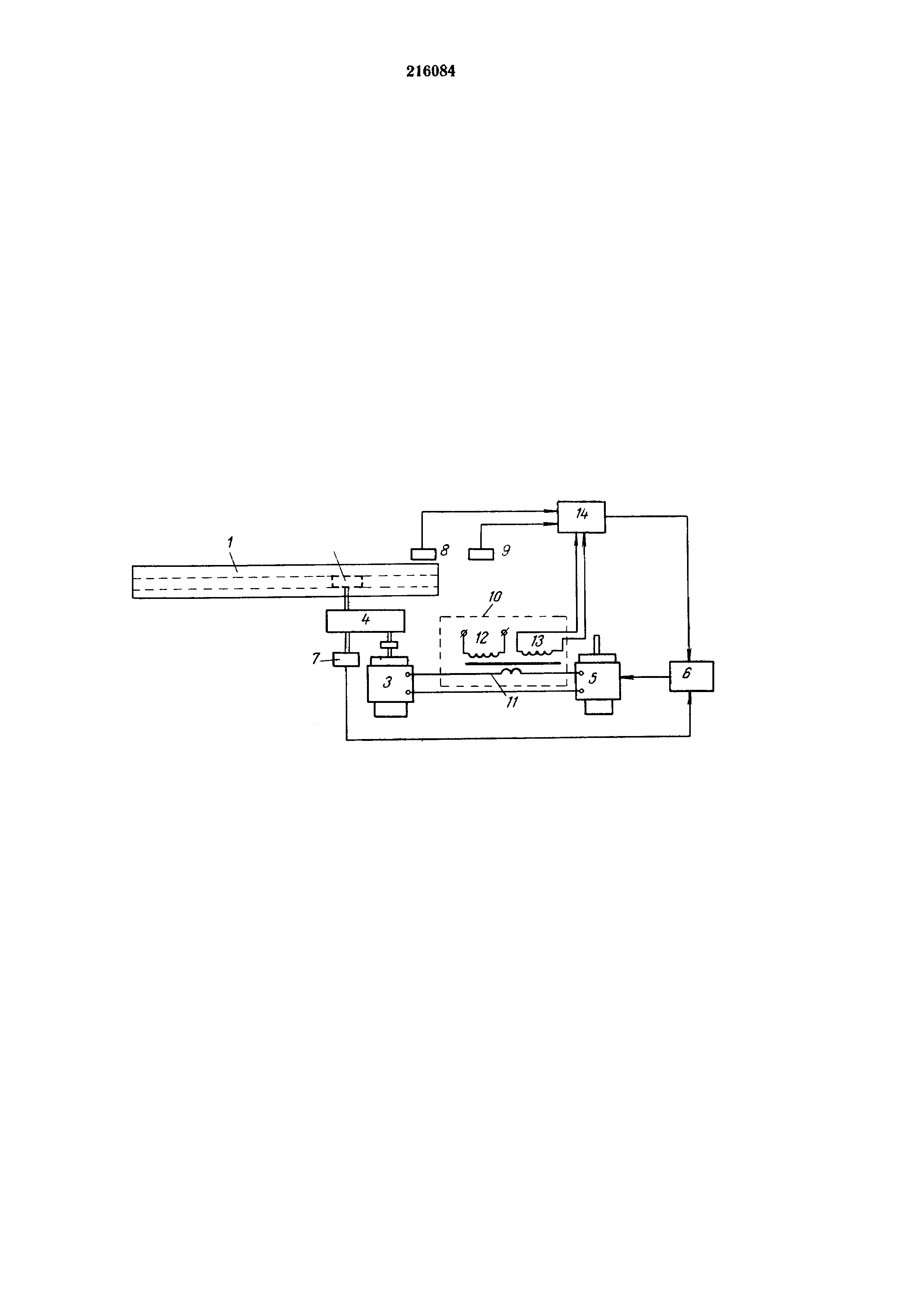
На чертеже приведена схема описываемого устройства.
Зубчатая рейка 1 перемещается по направляющим шестерней 2, приводимой во вращение электроприводом, состоящим из электродвигателя 3 и редуктора 4. Электродвигатель питается от генератора 5, управляемого схемой управления 6, получающего сигналы от командоаппарата 7, кинематически связанного с электроприводом.
На пути рейки установлены индуктивные датчики 8 и 9 положения. Датчик торможения 10, выполненный в виде О-образного сердечника с катушками, подмагничивается шиной 11 силовой цепи привода и подмагничивающей обмоткой 12. Подмагничивающая обмотка датчика торможения подключена к источнику постоянного тока в такой полярности, чтобы создаваемый ею магнитный поток не совпадал по направлению с магнитным потоком, создаваемым силовой цепью перед началом торможения электропривода.
При переключении тока главного привода в начале режима торможения в считывающей обмотке 13 индуктируется сигнал, который наряду с сигналами датчиков 8 и 9 подается на вход блока с логической схемой 14.
Датчики 8 и 9 пространственно расположены так, что при движении рейки 1 в заданном направлении, например при ходе назад, на вход логической схемы 14 подаются сигналы от датчиков в следующей последовательности: датчик положения 8 - датчик торможения 10 - датчик положения 9. При движении рейки команда на ее торможение подается в схему управления 6 от командоаппарата 7.
При нарушении нормальной работы командоаппарата торможения привода не произойдет и, следовательно в промежутке между сигналами от датчиков 8 и 9 в схему 14 не подается сигнал от датчика контроля торможения. В результате этого блок с логической схемой 14 выдает в схему управления 6 команду на аварийное торможение и остановку привода механизма.
Способ получения крупногабаритных плакированных листов
Способ нанесения покрытий в вакууме и устройство для его осуществления
Состав сварочной ленты и проволоки

