Результат интеллектуальной деятельности: МЕХАНИЗМ ПОДЪЕМА
Вид РИД
Изобретение
Изобретение относится к транспортному машиностроению, в частности к механизмам подъема (далее - МП) пусковых установок боевых машин пехоты и др. спецтехники.
Особенность применения подъемных механизмов в спецтехнике состоит в том, что в режиме автоматического управления предъявляются требования обеспечения высокой динамической точности привода и быстродействия, высокой чувствительности и высокой точности отработки управляющих команд. Из теории автоматического регулирования известно, что неблагоприятно влияют на динамику автоматического управления люфты в кинематической цепи между рабочим органом и двигателями, моменты сопротивления вращению, низкая угловая жесткость привода. Другой особенностью механизмов подъема пусковых установок является то, что для подъема установки требуется не полный поворот относительно оси вращения объекта регулирования, а поворот на ограниченный угол, что позволяет выполнить выходную ступень привода с применением зубчатого сектора, обеспечивающего снижение общих габаритов привода. Снижение массогабаритных характеристик привода является необходимым требованием для современных объектов применения.
Известными способами уменьшения люфта в кинематической цепи привода являются применение люфтовыбирающих устройств, которые наиболее эффективны в выходной ступени. Менее эффективным способом уменьшения люфта в кинематической цепи привода является введения механизма поджатая, обеспечивающего минимальный боковой рабочий зазор в зацеплении с зубчатым сектором. Применение механизма поджима позволяет нивелировать влияние весьма больших допусков на взаимное расположение сопрягаемых узлов выходной ступени привода на качество зацепления.
Особенностью люфтовыбирающих устройств, используемых в выходной ступени привода, является необходимость обеспечения большого значения момента люфтовыбирания. Компоновка классической схемы механизма люфтовыбирания реализуется при помощи разрезной шестерни на выходе привода. Необходимый в этом случае момент люфтовыбирания обеспечивается закруткой торсиона, размещаемого, как правило, внутри выходного вала МП. Известным примером применения такого механизма люфтовыбирания является «Поворотный механизм башни» [1], в котором на выходе механизма соосно установленны зубчатые колеса одно из которых выходное, а другое промежуточное, связанные торсионом и люфтовыбирающим устройством, выходное зубчатое колесо - коренная шестерня выполнена с возможностью разворота относительно промежуточного колеса, люфтовыбирающее устройство установлено между торсионом и промежуточным зубчатым колесом и выполнено регулируемым по направлению и величине люфтовыбирания, при этом момент люфтовыбирания выставляется равным величине момента нагрузки. Недостатком рассматриваемого устройства люфтовыбирания является значительные размеры привода по оси торсиона.
Одна из особенностей применения МП в боевых машинах пехоты заключается так же в том, что необходимо обеспечить большое передаточное отношение в кинематической цепи привода (около 400) и минимальный габарит по оси вращения орудия. Такие требования обеспечиваются выбором кинематической схемы привода и его компоновкой. Для обеспечения высокого передаточного отношения привода в качестве одной ступени выбирается планетарный редуктор, с преимуществами по габаритам и передаточным отношениям относительно обычной передачи и применение на выходной ступени сектора с большим числом зубьев, что обеспечивает получение большого передаточного отношения. Для обеспечения минимальных размеров привода по оси вращения орудия ось выходного вала электродвигателя располагается перпендикулярно оси вращения орудия и между планетарным редуктором и выходной ступенью с сектором применена коническая передача. Примером применения такой компоновки привода является известный механизм подъема боевой машины пехоты БМП-3 [2]. Это «классическая» компоновка привода подъема, применяемая в большинстве самоходных боевых машин и буксируемых орудий. Однако, в последнее время наблюдается тенденция к созданию необитаемых боевых модулей, у которых вооружение вынесено наружу башенной установки. В этом случае приводы наведения, как правило, находятся на открытом воздухе а сектор и выходная шестерня МП оказываются наиболее подвержены атмосферным воздействиям. Особо опасным является воздействие частиц пыли и грязи, которые прилипают к смазанным плохо защищенным зубчатым передачам. Появляется неравномерность вращения, подклинивание привода, что ведет к ухудшению динамической точности привода.
Известный механизм подъемный машины БМП-3 [2], наиболее близкий по технической сущности - прототип, содержит электродвигатель, планетарный редуктор в качестве первой ступени привода, коническую зубчатую передачу, обеспечивающую расположение оси выходного вала электродвигателя перпендикулярно оси вращения орудия, шестерня и сектор составляют выходную ступень привода. Шестерня выполнена разрезной и внутри полого вала шестерни расположен торсион, один конец которого жестко связан с одной частью разрезной шестерни, а другой посредством шлицевого соединения с валом-шестерней. Требуемое достаточно большое передаточное отношение (i=450) привода, при минимальном количестве ступеней и минимальных габаритах, обеспечивается за счет применения сектора с числом зубьев 300, что обеспечило передаточное отношение выходной ступени i=20 и за счет применения планетарного редуктора на первой ступени, обеспечившего общее передаточное отношение его с конической передачей I=22,5.
Недостатками рассматриваемого механизма подъемного является, во-первых, довольно большой осевой габарит, обусловленный применением торсиона в устройстве люфтовыбирания, а также отсутствие защиты сектора и выходной шестерни механизма подъемного от грязи и внешних воздействий. Также отсутствует защита от случайного попадания рук человека в зону зубчатого зацепления (например, при монтаже или настройке).
Цель изобретения - снижение массогабаритных параметров, повышение эксплуатационных характеристик и безопасности в процессе эксплуатации за счет введения защиты выходной ступени привода.
Указанная цель достигается тем, что в механизм подъема, содержащий корпус, электродвигатель, планетарный редуктор как первую ступень механизма, коническую передачу как вторую ступень и выходную ступень с устройством люфтовыбирания, состоящую из шестерни и сектора, согласно заявляемому изобретению сектор выполнен разрезным, две части которого соединены между собой посредством пластинчатых упругих элементов, планетарный редуктор выполнен по кинематической схеме, содержащей два корончатых колеса, сателлиты выполнены двухвенцовыми с разным количеством зубьев на венцах одного сателлита и установлены в общее водило таким образом, что каждый венец входит в зацепление с соответствующим корончатым колесом, при этом входным звеном планетарного редуктора является солнечное колесо, а выходом второе корончатое колесо, при этом первое корончатое колесо является неподвижной частью корпуса, а сам механизм подъема выполнен в едином герметичном корпусе в виде моноблока.
Существенными отличительными признаками являются:
- выполнение выходного сектора разрезным;
- использование в устройстве люфтовыбирания пластинчатых упругих элементов, например, плоских пружин;
- выполнение планетарного редуктора по кинематической схеме, содержащей два корончатых колеса, сателлиты выполнены двухвенцовыми с разным количеством зубьев на венцах одного сателлита и установлены в общее водило таким образом, что каждый венец входит в зацепление с соответствующим корончатым колесом, при этом входным звеном планетарного редуктора является солнечное колесо, а выходом второе корончатое колесо, при этом первое корончатое колесо является неподвижной частью корпуса;
- выполнение МП в едином герметичном корпусе в виде моноблока.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы известны в технике, но их введение в указанной связи в заявляемый механизм подъема позволяет:
- обеспечить существенное уменьшение осевого габарита механизма подъема по сравнению с торсионным вариантом люфтовыбирания и существенно увеличить момент люфтовыбирания по сравнению с известным вариантом применения, за счет выполнения выходного сектора разрезным и использования в устройстве люфтовыбирания пластинчатых упругих элементов, например, плоских пружин;
- уменьшить габариты выходного сектора до размеров, позволяющих выполнить механизм в едином корпусе с минимальными габаритами, за счет перераспределения общего передаточного отношения по ступеням механизма, за счет выполнения планетарного редуктора по кинематической схеме, содержащей два корончатых колеса, сателлиты выполнены двухвенцовыми с разным количеством зубьев на венцах одного сателлита и установлены в общее водило таким образом, что каждый венец входит в зацепление с соответствующим корончатым колесом, при этом входным звеном планетарного редуктора является солнечное колесо, а выходом второе корончатое колесо, при этом первое корончатое колесо является частью корпуса (неподвижно), обеспечить реализацию планетарного редуктора по известной кинематической схеме 3К [3], особенностью, которой является получение более высокого передаточного отношения, относительно широко применяемой, в том числе и в прототипе, передачи 2k-h, в которой можно увеличить передаточное отношение до 6-10, а для получения больших передаточных отношений используется последовательное соединение двух или трех таких передач, что в свою очередь приводит к увеличению габаритов редуктора. Для силовых планетарных передач по предлагаемой кинематической схеме обычно применяют передаточное отношение от 40 до 80. Таким образом, применение предлагаемой конструкции планетарного редуктора позволило повысить передаточное отношение первой ступени механизма в несколько раз и за счет этого пропорционально снизить передаточное отношение выходной ступени механизма при сохранении общего передаточного отношения.
- повысить эксплуатационные возможности механизма, за счет выполнения механизма подъема в едином герметичном корпусе в виде моноблока, так как исключается воздействие окружающей среды на внутренности механизма, что обеспечивает надежность и стабильность работы.
- повысить безопасность работы обслуживающего персонала (при монтаже, настройке и проведении технического обслуживания), за счет размещения выходного сектора внутри корпуса механизма подъема.
Изобретение поясняется чертежами, где
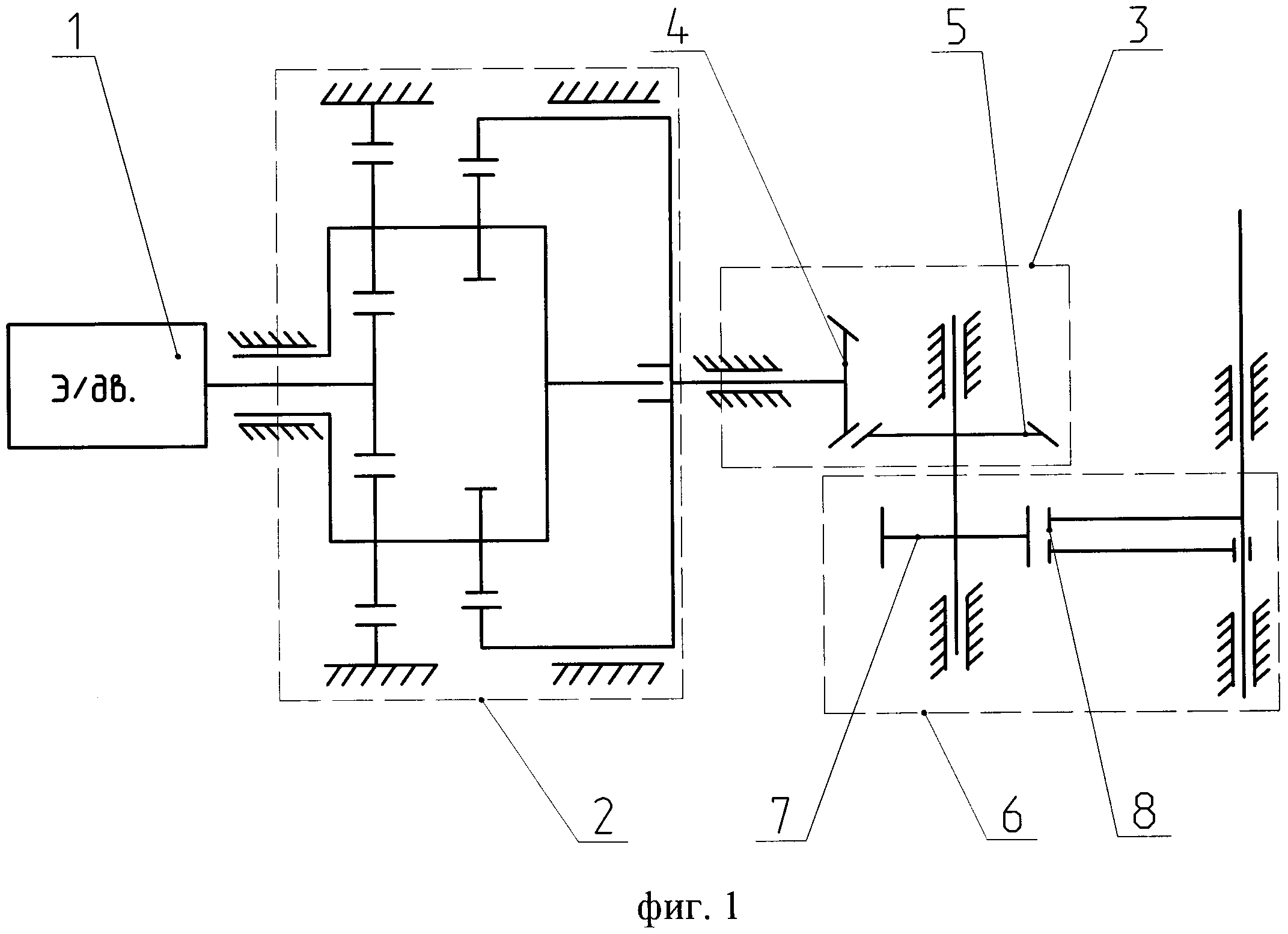
На Фиг. 1 представлена кинематическая схема заявляемого механизма подъема.
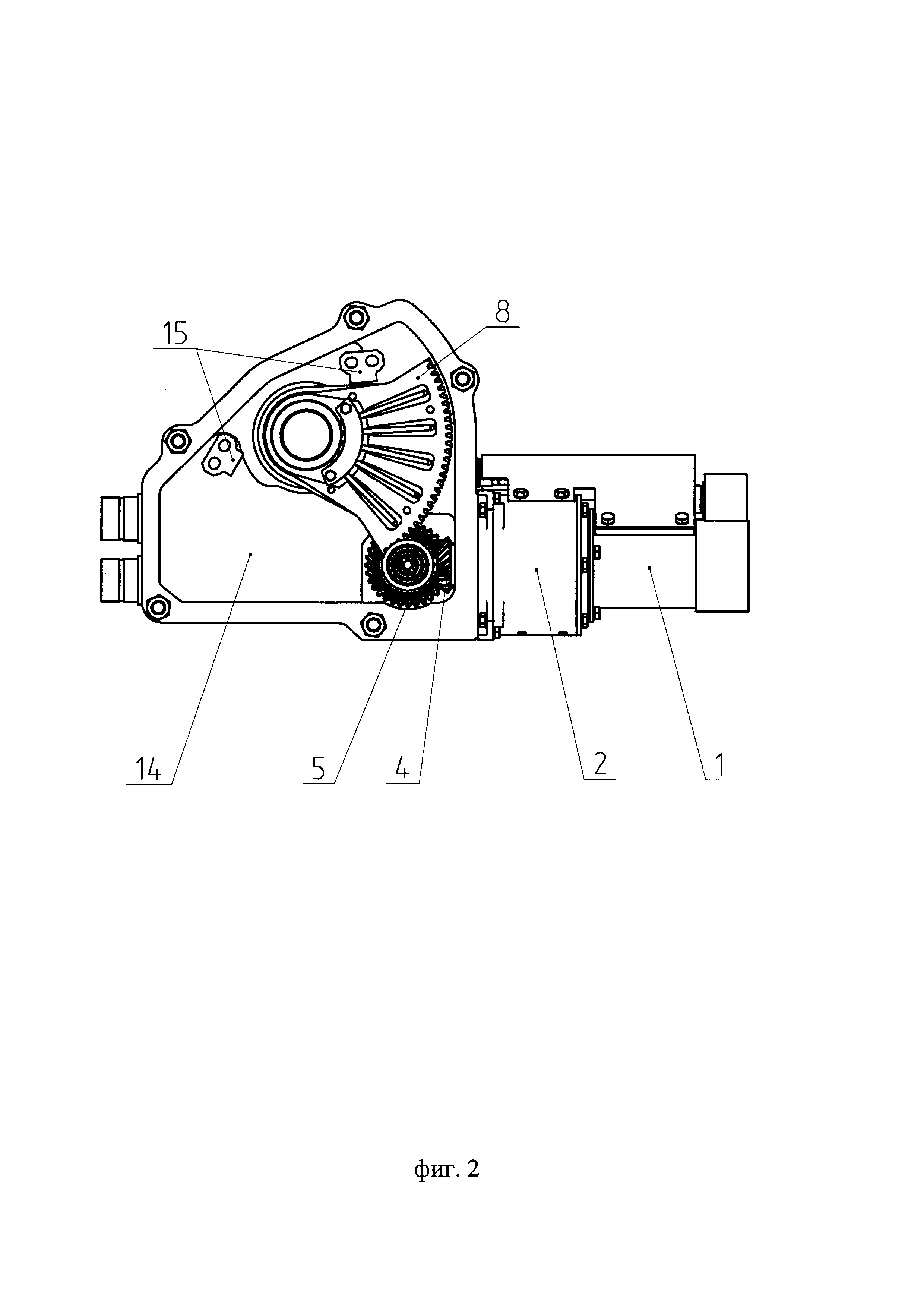
На Фиг. 2 представлен общий вид механизма подъема со снятой крышкой.
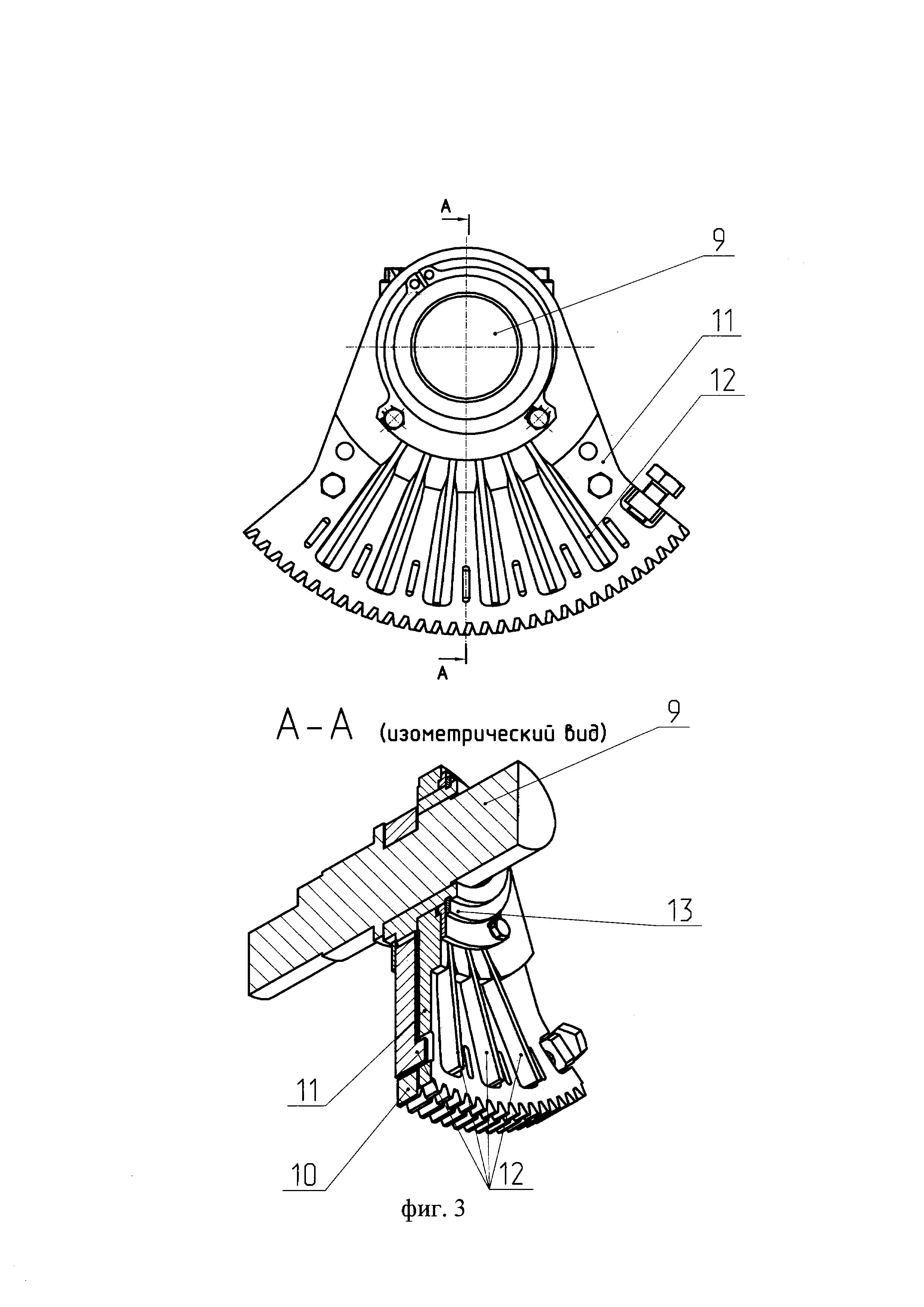
На Фиг. 3 представлен чертеж разрезного сектора с люфтовыбирающим устройством (далее - ЛВУ).
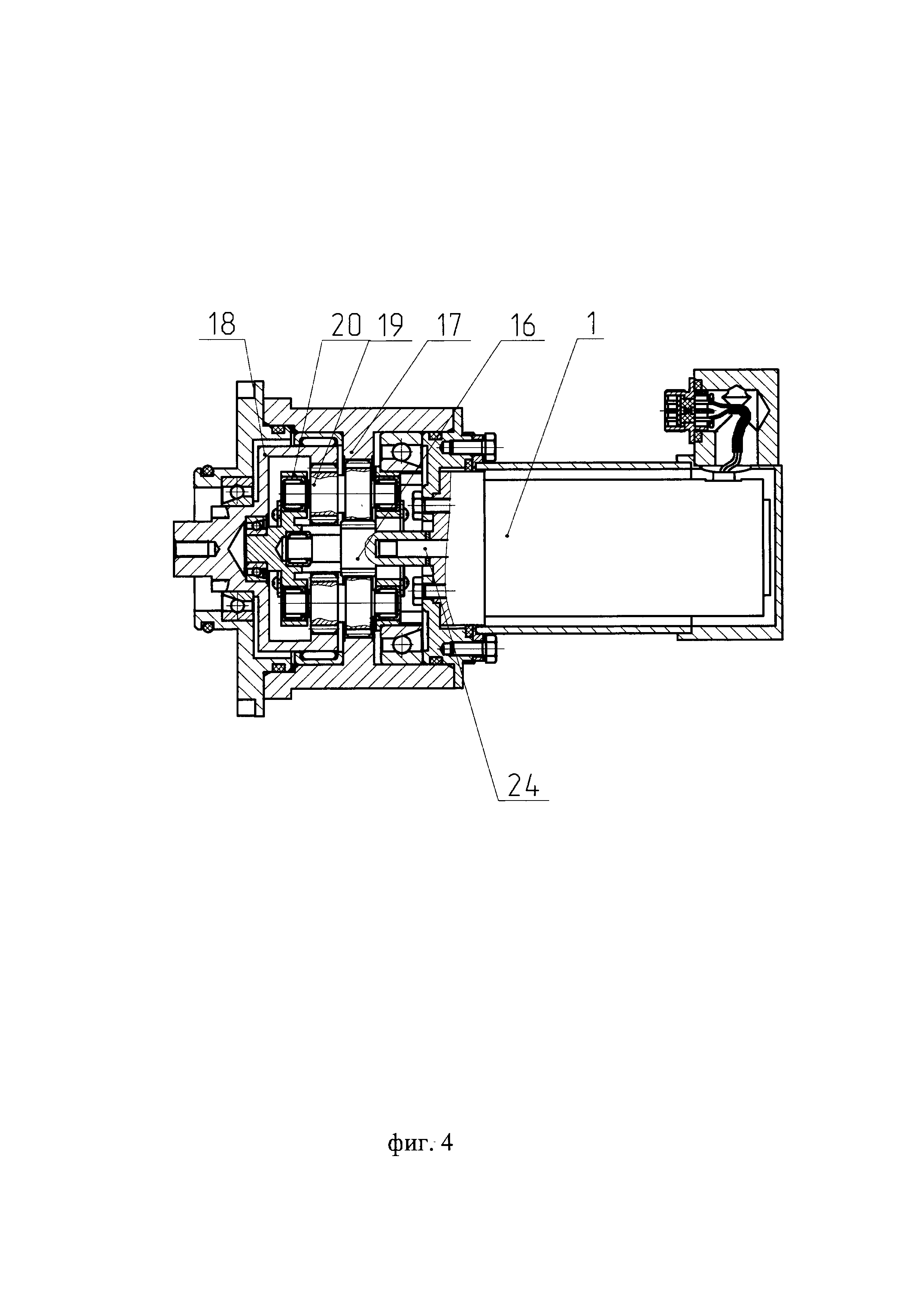
На Фиг. 4 представлен чертеж планетарного редуктора.
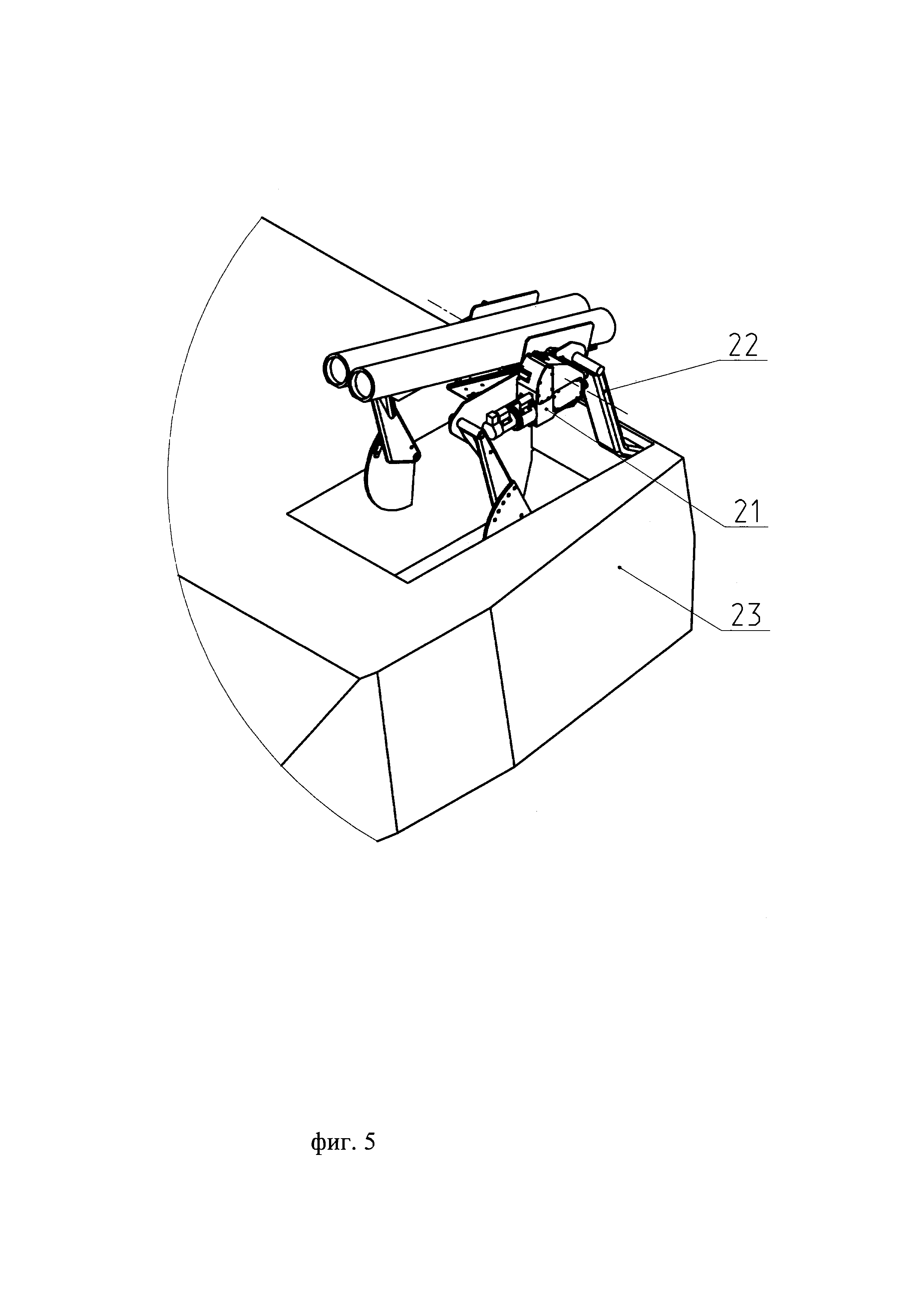
На Фиг. 5 представлен пример размещения механизма подъема на пусковой установке.
Механизм подъема (Фиг. 1) представляет из себя трехступенчатый редуктор с электродвигателем 1, в котором первой ступенью является планетарный редуктор 2, второй ступенью является коническая передача 3, состоящая из пары конических шестерен 4, 5, третьей ступенью является выходная цилиндрическая передача 6, состоящая из шестерни 7 и разрезного сектора с люфтовыбирающим устройством 8. Разрезной сектор с люфтовыбирающим устройством (ЛВУ) 8 (фиг. 3) состоит из вала 9 и двух секторов: основного сектора 10, жестко связанного с валом 9, и вспомогательного сектора 11, имеющего возможность поворота вокруг оси вала 9 и связанного с основным сектором 10 посредством плоских пружин 12, размещенных в пазах основного 10 и вспомогательного секторов 11. В кольцевой проточке вала 9 установлено кольцо 13, необходимое для осевой фиксации вспомогательного сектора 11. Для ограничения угла поворота разрезного сектора (Фиг. 2) с ЛВУ 8, во избежание выхода его из зацепления, в корпусе механизма подъема 14 размещены жесткие упоры 15.
Планетарный редуктор 2 (фиг. 4) выполнен по кинематической схеме 3К и состоит из солнечного колеса 16, являющегося входным звеном редуктора, двух корончатых колес, где первое неподвижное корончатое колесо 17 жестко связано с корпусом механизма подъема 14, а второе подвижное корончатое колесо 18 является выходным звеном планетарного редуктора 2, двух двухвенцовых сателлитов 19, выполненных с разным количеством зубьев на венцах одного сателлита и расположенных в общем водиле 20 таким образом, что каждый венец входит в зацепление с соответствующим корончатым колесом 17, 18. Передаточное отношение такого планетарного редуктора в конкретном образце составило i=40,3, что позволило уменьшить, относительно классической конструкции прототипа, передаточное отношение выходной ступени механизма в 3 раза и уменьшить габариты разрезного сектора с люфтовыбирающим устройством до размеров, обеспечивающих его размещение в корпусе механизма подъема 14 (Фиг. 2) с требуемыми габаритами.
Механизм подъема выполнен в едином герметичном корпусе в виде моноблока.
В качестве примера, механизм подъема 21 (Фиг. 5) может быть размещен на раме пусковой установки 22 вне башни 23.
Механизм подъема работает следующим образом:
В режиме автоматического управления при подаче управляющего сигнала на электродвигатель 1, вал электродвигателя (на фигуре не показано) обеспечивает вращение солнечного колеса 16, которое передается первому венцу сателлита 19, который обкатывается по неподвижному корончатому колесу 17 и передает планетарное движение второму венцу сателлита 19, который за счет водила 20 приводит во вращение подвижное корончатое колесо 18, передающее движение на коническую зубчатую передачу 3, вращающий момент от которой посредством шестерни 7 передается на разрезной сектор с ЛВУ 8, вал 9 которого начинает вращаться. При жестком закреплении выходного вала 9 механизма подъема с валом, на котором крепится объект (орудие) (на фигуре не показано), производится его подъем или опускание в зависимости от фазы управляющего сигнала электродвигателя 1. Величиной управляющего сигнала электродвигателя 1 регулируется скорость подъема или опускания. Передача вращения от электродвигателя до вала объекта регулирования (орудие) (на фигуре не показано) с минимальным люфтом обеспечивается применением разрезного сектора с ЛВУ 8, который обеспечивает момент люфтовыбирания, равный величине момента нагрузки, соответствующим выбором размеров плоских пружин, подбором их по количеству и величиной угла поворота вспомогательного сектора 11 относительно основного 10, требуемого для совмещения их зубьев.
Заявляемое техническое решение было использовано в ОАО «СКБ ПА» при разработке редуктора поворота блока пускового изделий «Булат» по ВН, в рамках составной части ОКР «Разработка системы наведения вооружения для боевых машин пехоты с необитаемым боевым модулем «Эпоха».
Результаты изготовления и испытаний образцов подтвердили эффективность примененных решений, что позволило обеспечить жесткие требования ТЗ по массе, габаритам и по точности.
Источники информации:
1. Пат. 2547669 Российская Федерация, МПК F41A 27/20, F41G 5/14. Поворотный механизм башни / В.В. Орленко, Н.А. Леонов, А.Б. Карпенко, И.В. Антипов, В.Я. Короп, заявитель и патентообладатель ОАО "Специальное конструкторское бюро приборостроения и автоматики". - №2014105273/11, заявл. 12.02.2014, опубл. 10.04.2015, Бюл. №10.
2. Мокрушин Д. Схема БМП-3 [Электронный ресурс]. - Режим доступа: URL:http://twower.livejoumal.com/595870.html?thread=21286558#t21286558%2 0%Е2%80%А6
3. Козырев, В.В. Планетарные редукторы в составе роботов и мехатронных систем: учеб. пособие / В.В. Козырев; Владим. гос. ун-т. - Владимир: Изд-во Владим. гос. ун-та, 2008. - 48 с. - ISBN 978-5-89368-870-2.
Механизм подъема, содержащий корпус, электродвигатель, планетарный редуктор как первую ступень механизма, коническую передачу как вторую ступень и выходную ступень с устройством люфтовыбирания, состоящую из шестерни и сектора, отличающееся тем, что сектор выполнен разрезным, две части которого соединены между собой посредством пластинчатых упругих элементов, планетарный редуктор выполнен по кинематической схеме, содержащей два корончатых колеса, сателлиты выполнены двухвенцовыми с разным количеством зубьев на венцах одного сателлита и установлены в общее водило таким образом, что каждый венец входит в зацепление с соответствующим корончатым колесом, при этом входным звеном планетарного редуктора является солнечное колесо, а выходом - второе корончатое колесо, при этом первое корончатое колесо является неподвижной частью корпуса, механизм подъема выполнен в едином герметичном корпусе в виде моноблока.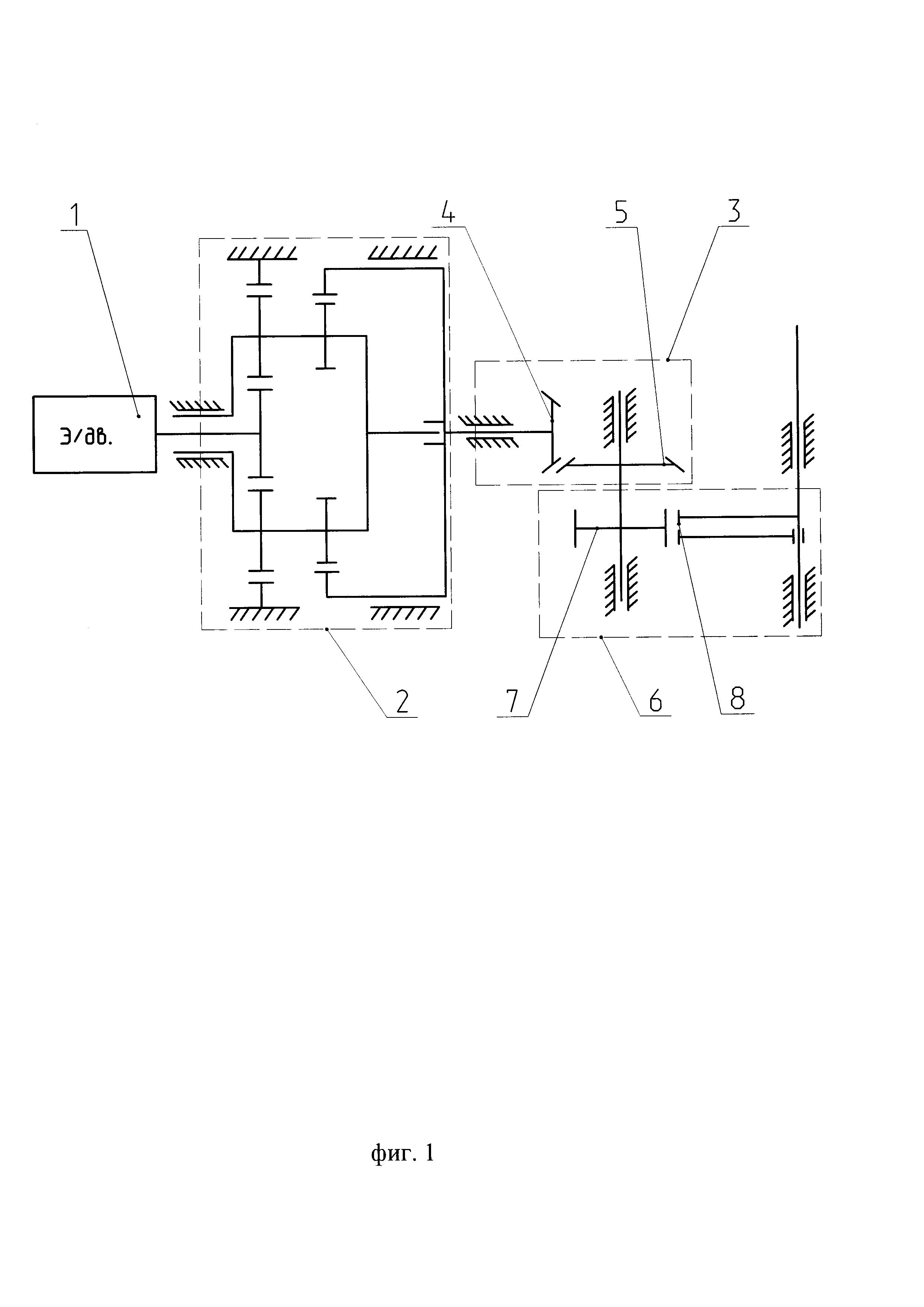
Способ пространственно-временного приема сигналов с аналоговой модуляцией с отслеживанием изменяющегося направления на источник сигнала
Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования
Фильтр для очистки газов
Устройство дистанционного разминирования
Квазиоптимальный гребенчатый фильтр для последовательности широкополосных и сверхширокополосных когерентных радиоимпульсов со сжатием спектра сигнала
Способ учета отклонений разрыва (центра группы разрывов, центра группы разрывов боевых элементов) высокоточных боеприпасов
Стенд для полунатурного моделирования системы самонаведения летательного аппарата
Способ распознавания объекта при его контакте с проволочным ограждением
Способ противоторпедной защиты корабля или подводной лодки
Носитель аппаратуры измерительного гидроакустического комплекса
Способ определения плавности вращения редуктора
Способ определения плавности вращения редуктора

