Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОБЪЕКТА МЕТАНИЯ
Вид РИД
Изобретение
Изобретение относится к области измерений и испытаний, а именно к измерениям линейной скорости с помощью фотографических средств.
Известен способ определения скорости объекта метания (ОМ) (Шкворников П.Н., Платонов Н.M. Экспериментальная баллистика. Приборы и методы баллистических измерений. София: Изд-во ВЪВ ВТС, 1976, с. 144.). Способ состоит в использовании явления образования головной ударной волны (УВ) и заключается в фотографировании мгновенного состояния головной УВ, созданной движущимся со сверхзвуковой скоростью ОМ. Скорость ОМ определяют на основании значения угла раствора конуса Маха. Данный способ выбран в качестве прототипа.
Недостатком данного способа является его узкая область применения, обусловленная использованием специальных теневых схем оптической регистрации для получения изображения головной УВ. Различные теневые схемы оптической регистрации (прямотеневой метод, Шлирен-метод, интерференционный метод), позволяют получить изображение головной УВ только в определенных условиях, ограниченных областью применения конкретной схемы. Данные схемы регистрации используются в аэродинамических трубах и аэробаллистических трассах закрытого типа. Применение данных методов в полигонных условиях к широкому диапазону размеров ОМ не представляется возможным.
Решаемой технической проблемой является создание универсального способа определения скорости ОМ по результатам оптической регистрации, применимого для использования в условиях закрытой аэробаллистической трассы и в полигонных условиях.
Технический результат при использовании заявляемого способа заключается в определении скорости ОМ по результатам оптической регистрации при проведении регистрации, как в лабораторных, так и полигонных условиях.
Технический результат достигается за счет того, что в заявляемом способе определения скорости ОМ, включающем оптическую регистрацию положения движущегося со сверхзвуковой скоростью ОМ, созданной им головной ударной волны на участке, где она имеет прямолинейную форму (вырождается в звуковую волну) и определение угла раствора конуса Маха, в отличие от прототипа производят видеорегистрацию положения движущегося ОМ и созданной им головной ударной волны на фоне поверхности со структурой множества мелких деталей с высоким оптическим контрастом. Угол раствора конуса Маха определяют на основе анализа смещения элементов фонового экрана в его изображении, вызванного прохождением света через область возмущения. На основании полученных данных, вычисляют скорость движения ОМ.
Использование всей совокупности признаков формулы изобретения, возможность использования в качестве фона как естественного фона (лес, песок, трава и т.д.) так и специально созданных экранов для выявления головной УВ в результатах видеорегистрации и последующего определения угла раствора конуса Маха и скорости ОМ, позволяет применять заявленный способ, как в лабораторных, так и в полигонных условиях.
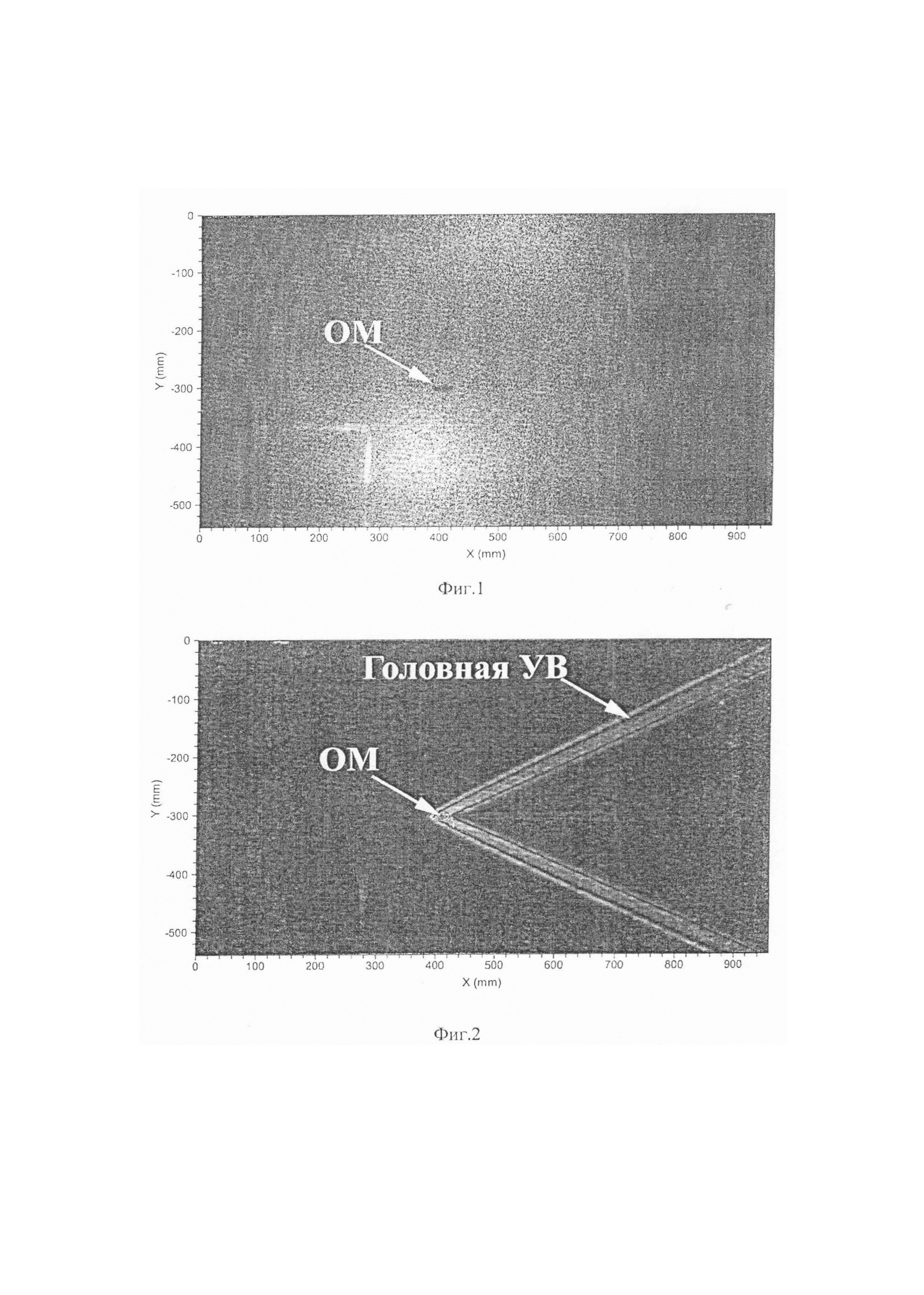
Заявляемый способ поясняется фигурами. На фиг. 1 приведен фрагмент видеорегистрации движущегося ОМ на фоне поверхности со структурой множества мелких деталей с высоким оптическим контрастом (на фоне специально созданного экрана). На фиг. 2 представлено изображение УВ, полученное посредством анализа смещения элементов фонового экрана в его изображении, вызванного прохождением света через область возмущения.
Заявляемый способ осуществляется следующим образом.
При проведении аэробаллистического эксперимента осуществляют высокоскоростную видеорегистрацию положения ОМ, движущегося со сверхзвуковой скоростью, и созданной им головной ударной волны. Видеорегистрация осуществляется на фоне поверхности со структурой множества мелких деталей с высоким оптическим контрастом. В качестве фона может применяться как естественный фон (лес, песок, трава и т.д.), так и специально созданные экраны, что позволяет применять заявленный способ, как в лабораторных, так и в полигонных условиях.
Параметры видеорегистрации должны обеспечивать получение контрастного изображения поверхности фона. Зона видеорегистрации выбирается исходя из геометрических размеров ОМ и должна обеспечивать регистрацию конуса Маха.
Головная УВ является областью с градиентом плотности, что в свою очередь приводит к изменению показателя преломления в области возмущения. При проведении видеорегистрации головной УВ, вызванной движением ОМ со сверхзвуковой скоростью, на фоне поверхности со структурой множества мелких деталей с высоким оптическим контрастом происходит смещение элементов изображения фона в соответствии с явлением рефракции.
На основании анализа смещений элементов в изображении фона вызванных, в соответствии с законами рефракции, прохождением света через область возмущения, определяют форму головной УВ. Результатом анализа является изображение головной УВ, по которому производят определение угла раствора конуса Маха. При известном значении угла раствора конуса Маха скорость движения ОМ определяется выражением:

где VОМ - скорость движения ОМ; а - скорость звука в воздухе; α - половина угла раствора конуса Маха (Шкворников П.Н., Платонов Н.М. Экспериментальная баллистика. Приборы и методы баллистических измерений. София: Изд-во ВЪВ ВТС, 1976, с. 144.).
Таким образом, заявляемый способ позволяет определять скорость ОМ движущегося со сверхзвуковой скоростью при проведении регистрации, как в лабораторных, так и полигонных условиях.
Возможность использования в качестве фона, как естественного фона (лес, песок, трава и т.д.), так и специально созданных экранов произвольных размеров позволяет варьировать зону регистрации, что позволяет применять заявляемый способ к определению скорости ОМ произвольных размеров.
Заявляемый способ опробован в полигонных условиях и показал свою работоспособность.
Способ определения скорости объекта метания (ОМ), включающий оптическую регистрацию положения движущегося со сверхзвуковой скоростью ОМ, созданной им головной ударной волны, и определение угла раствора конуса Маха, отличающийся тем, что производят видеорегистрацию положения движущегося ОМ и созданной им головной ударной волны на фоне поверхности со структурой множества мелких деталей с высоким оптическим контрастом, угол раствора конуса Маха определяют на основе анализа смещения элементов фонового экрана в его изображении, вызванного прохождением света через область возмущения, исходя из полученных данных, вычисляют скорость движения ОМ.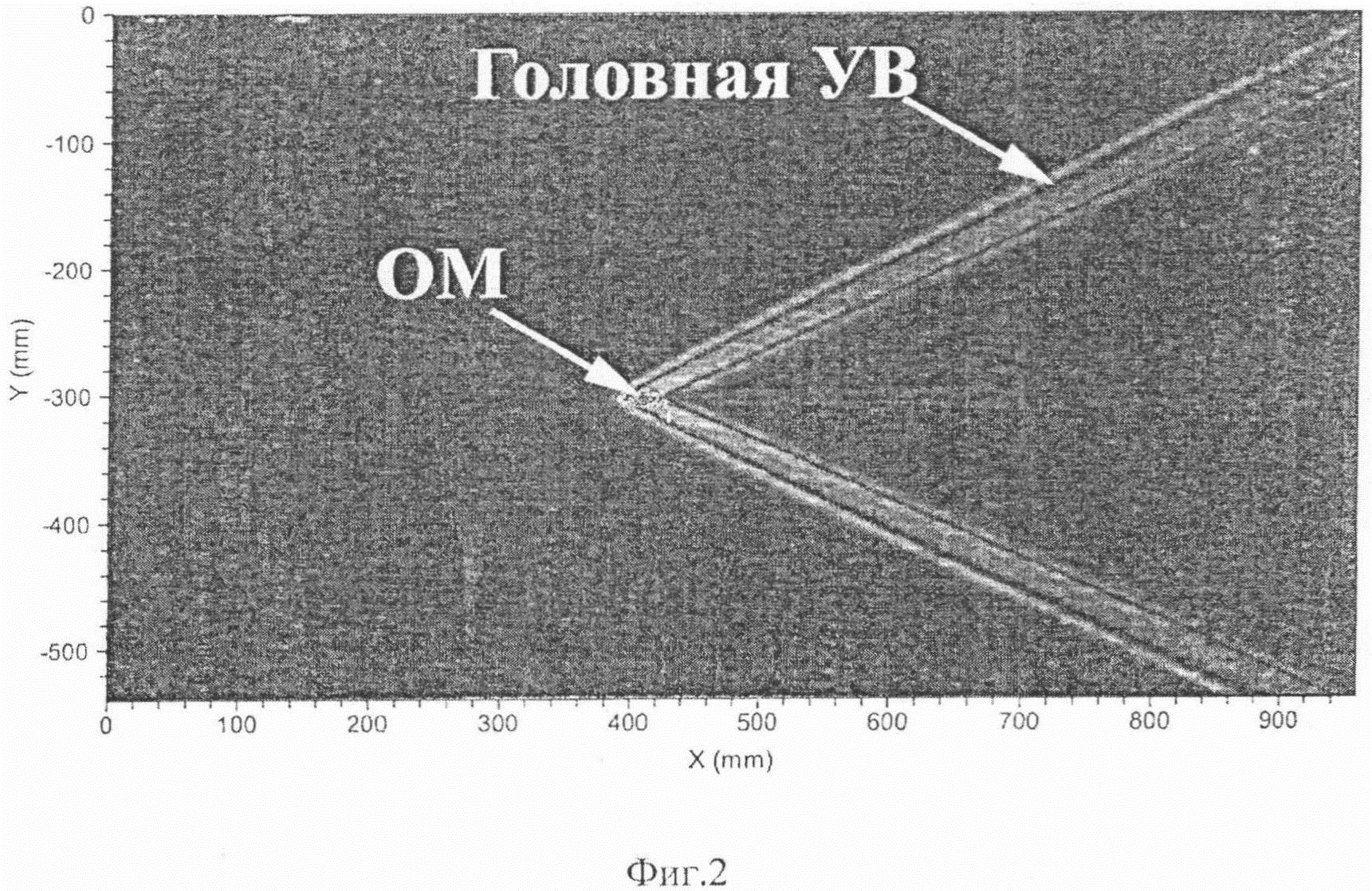
Способ определения сплошности покрытия изделия
Интерферометр
Переход волоконно-оптический
Система параметрической гидролокации с функцией получения акустического изображения целей
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Сцинтилляционный материал на основе zno-керамики, способ его получения и сцинтиллятор
Устройство фиксации сложенных аэродинамических поверхностей летательного аппарата
Устройство управления спускаемым летательным аппаратом
Светочувствительный взрывчатый состав
Способ определения пространственных координат движущегося объекта испытаний в виде тела вращения с известными геометрическими параметрами
Способ определения наличия подрыва заряда взрывчатого вещества, содержащегося в объекте испытания, и задержки его подрыва от момента контакта объекта испытания с преградой и устройство для его осуществления
Импульсный источник света
Способ импульсного освещения процессов
Устройство для инициирования зарядов взрывчатых веществ
Способ получения изображения быстропротекающего процесса и система для его осуществления
Способ визуализации оптических неоднородностей
Способ определения температуры нагретой поверхности летательного аппарата при сверхзвуковом обтекании набегающим потоком

