Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО УГЛУ КРЕНА
Вид РИД
Изобретение
Изобретение относится к области систем управления летательными аппаратами, а именно к системам управления беспилотными летательными аппаратами (БПЛА) самолетного типа. Полет БПЛА осуществляется при любых погодных условиях и при действии на него координатных и параметрических помех. Точность работы БПЛА при действии помех уменьшается и может произойти потеря устойчивости. Для обеспечения компенсации помех используются грубые (робастные) системы и системы адаптивного управления.
При построении робастных систем управления точно параметры объекта управления не известны, а известны диапазоны их изменения - они не являются постоянными. Именно поэтому возникают непреодолимые трудности построения систем управления нестационарными объектами. Регуляторы строятся на основании «средних» значений параметров, определяемых из знания диапазона их изменения. В результате построенные робастные системы не могут точно обеспечивать желаемые эталонные режимы работы системы управления нестационарными объектами, т.к. они не используют при формировании управления отклонения реальных режимов работы от эталонных.
Наиболее близким техническим решением к предлагаемому изобретению (прототипом) является система автоматического управления БПЛА, содержащая первый сумматор и последовательно соединенные исполнительное устройство, БПЛА и датчик угла крена, вход которого соединен со входом датчика угловой скорости крена [Лебедев А.А. и др. Динамика систем управления беспилотным летательным аппаратом. - М.: Машиностроение, 1965. - 528 с., с. 220-222].
Недостатком известного технического решения являются сложность системы управления, низкий запас устойчивости, а также пониженное качество переходных процессов при действии на БПЛА координатно-параметрических помех. При этом в процессе полета БПЛА изменение внешней среды (давления, температуры, высоты полета, скорости и направления ветра и т.п.) приводят к изменению параметров дифференциального уравнения БПЛА, а значит и к изменению запасов устойчивости и качества переходных процессов в системе управления.
Технический результат, достигаемый в настоящем изобретении, заключается в упрощении системы управления, повышении ее запасов устойчивости, улучшении качества переходных процессов при действии на объект управления (беспилотный летательный аппарат) координатно-параметрических помех.
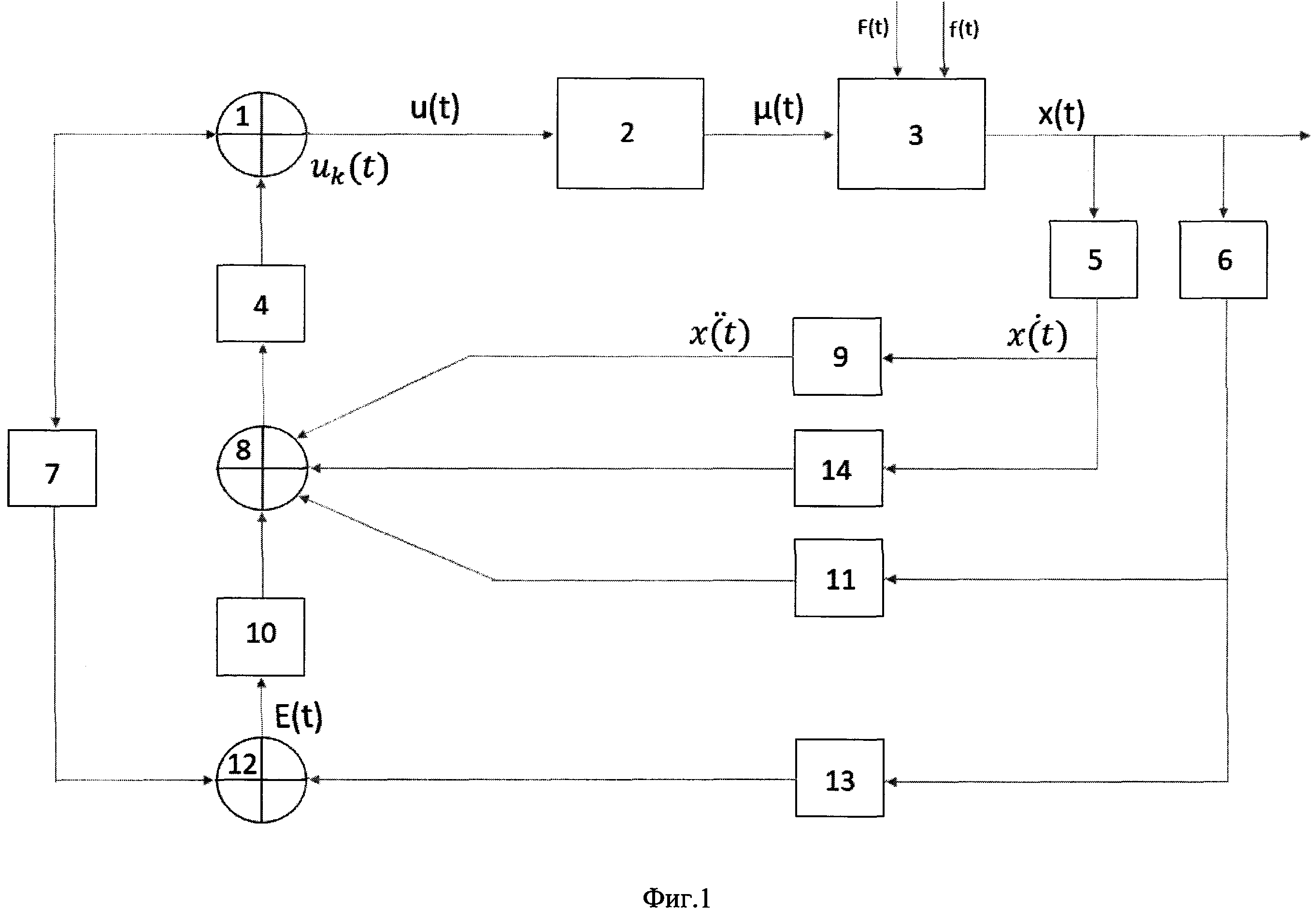
Указанный технический результат достигается тем, что система автоматического управления беспилотным летательным аппаратом по углу крена, содержащая первый сумматор и последовательно соединенные исполнительное устройство, беспилотный летательный аппарат и датчик угла крена, вход которого соединен со входом датчика угловой скорости крена, отличается от прототипа тем, что она дополнительно содержит дифференциатор, интегратор, два сумматора и пять усилителей, вход системы управления через первый сумматор соединен со входом исполнительного устройства, а через последовательно соединенные первый усилитель, второй сумматор, интегратор, третий сумматор и второй усилитель - со вторым входом первого сумматора, выход датчика угловой скорости крена подключен через дифференциатор ко второму входу третьего сумматора, а через третий усилитель - к третьему входу третьего сумматора, выход датчика угла крена через четвертый усилитель соединен с четвертым входом третьего сумматора, а через пятый усилитель - со вторым входом второго сумматора.
Предложенное в настоящем изобретении техническое решение позволяет компенсировать влияние координатно-параметрических помех и приводит к ликвидации вышеупомянутых недостатков известного технического решения (прототипа) задачи управления БПЛА по углу крена.
На чертеже (фиг. 1) изображена система автоматического управления БПЛА, где приняты следующие обозначения:
1 - первый сумматор,
2 - исполнительное устройство (привод),
3 - беспилотный летательный аппарат (объект управления),
4 - второй усилитель,
5 - датчик угловой скорости крена,
6 - датчик угла крена,
7 - первый усилитель,
8 - третий сумматор,
9 - дифференциатор,
10 - интегратор,
11 - четвертый усилитель,
12 - второй сумматор,
13 - пятый усилитель,
14 - третий усилитель,
uk(t) - корректирующее управление,
ХЗ(t) - задание для системы управления,
u(t) - управление,
 - сигнал рассогласования,
- сигнал рассогласования,
 - коэффициент усиления усилителей (7) и (13).
- коэффициент усиления усилителей (7) и (13).
Функционирует предлагаемая система управления следующим образом.
Сигнал задания ХЗ(t) поступает на вход системы управления БПЛА - на первый вход первого сумматора (1) и на вход первого усилителя (7). На второй вход первого сумматора (1) поступает сигнал коррекции uk(t), который сформирован элементами схемы системы управления 1, 4-13. В результате формируется сигнал управления:
u(t)=XЗ(t)+uk(t).
В процессе функционирования системы управления в полете на БПЛА воздействуют параметрические F(t) и координатные ƒ(t) помехи, которые приводят к ошибкам управления. С целью компенсации действия помех методом покомпонентного формирования управления (МПФУ) [Лащев А.Я. Синтез адаптивных систем управления с использованием идеи параметрических отрицательных обратных связей / Автоматика и телемеханика, 1994, №4, с. 108-116; Лащев А.Я. Управление жесткостью крепления упруго-деформируемых элементов конструкций / Приборы и системы. Управление, контроль, диагностика, 2006, №7, с. 8-12] формируется корректирующее управление uk(t):

При этом параметры k,  ,
,  и
и  - постоянные коэффициенты усиления соответственно второго усилителя (4), первого усилителя (7) и пятого усилителя (13), четвертого усилителя (11) и третьего усилителя (14). Эти параметры выбираются из условия обеспечения устойчивости и желаемого качества переходного процесса.
- постоянные коэффициенты усиления соответственно второго усилителя (4), первого усилителя (7) и пятого усилителя (13), четвертого усилителя (11) и третьего усилителя (14). Эти параметры выбираются из условия обеспечения устойчивости и желаемого качества переходного процесса.
Сигнал uk(t) поступает на вход первого сумматора, выход которого соединен с входом исполнительного устройства (привода) (2), который формирует на своем выходе сигнал, отклоняющий рули (элероны) БПЛА (рули на схеме не указаны). Динамика привода представляется апериодическим звеном первого порядка.
В результате поток воздуха поворачивает БПЛА на некоторый угол x(t), который измеряется датчиком угла крена (6) и датчиком угловой скорости крена (5), а после окончания переходного процесса точно будет равен сигналу ХЗ(t) задания системы.
Это видно из уравнения корректирующего управления uk(t). Действительно, при равенстве x(t)=ХЗ(t) сигнал на входе интегратора (10) будет равен нулю, а на его выходе ровно такой сигнал, который обеспечивает это равенство. При этом будет скомпенсировано и действие координатно-параметрических помех, действующих на БПЛА.
Таким образом, предложенная грубая (робастная) система управления в отличие от известных является системой нового типа - грубой системой управления с коррекцией управления по выходу, когда сигнал управления формируется с учетом отклонения системы от его желаемого движения. Ввиду того, что при наличии интегратора (10) система является астатической, она в статике будет, в отличие от известных робастных систем, обеспечивать равенство сигнала задания ХЗ(t) выходному сигналу x(t) БПЛА. В динамике это равенство легко обеспечить выбором коэффициента k-коэффициента усиления второго усилителя (4).
Система автоматического управления беспилотным летательным аппаратом по углу крена, содержащая первый сумматор, исполнительное устройство и датчик угла крена беспилотного летательного аппарата, при этом вход указанного датчика угла крена соединен со входом датчика угловой скорости крена, отличающаяся тем, что она дополнительно содержит дифференциатор, интегратор, два сумматора и пять усилителей, вход системы управления через первый сумматор соединен со входом исполнительного устройства, а через последовательно соединенные первый усилитель, второй сумматор, интегратор, третий сумматор и второй усилитель - со вторым входом первого сумматора, выход датчика угловой скорости крена подключен через дифференциатор ко второму входу третьего сумматора, а через третий усилитель - к третьему входу третьего сумматора, выход датчика угла крена через четвертый усилитель соединен с четвертым входом третьего сумматора, а через пятый усилитель - со вторым входом второго сумматора.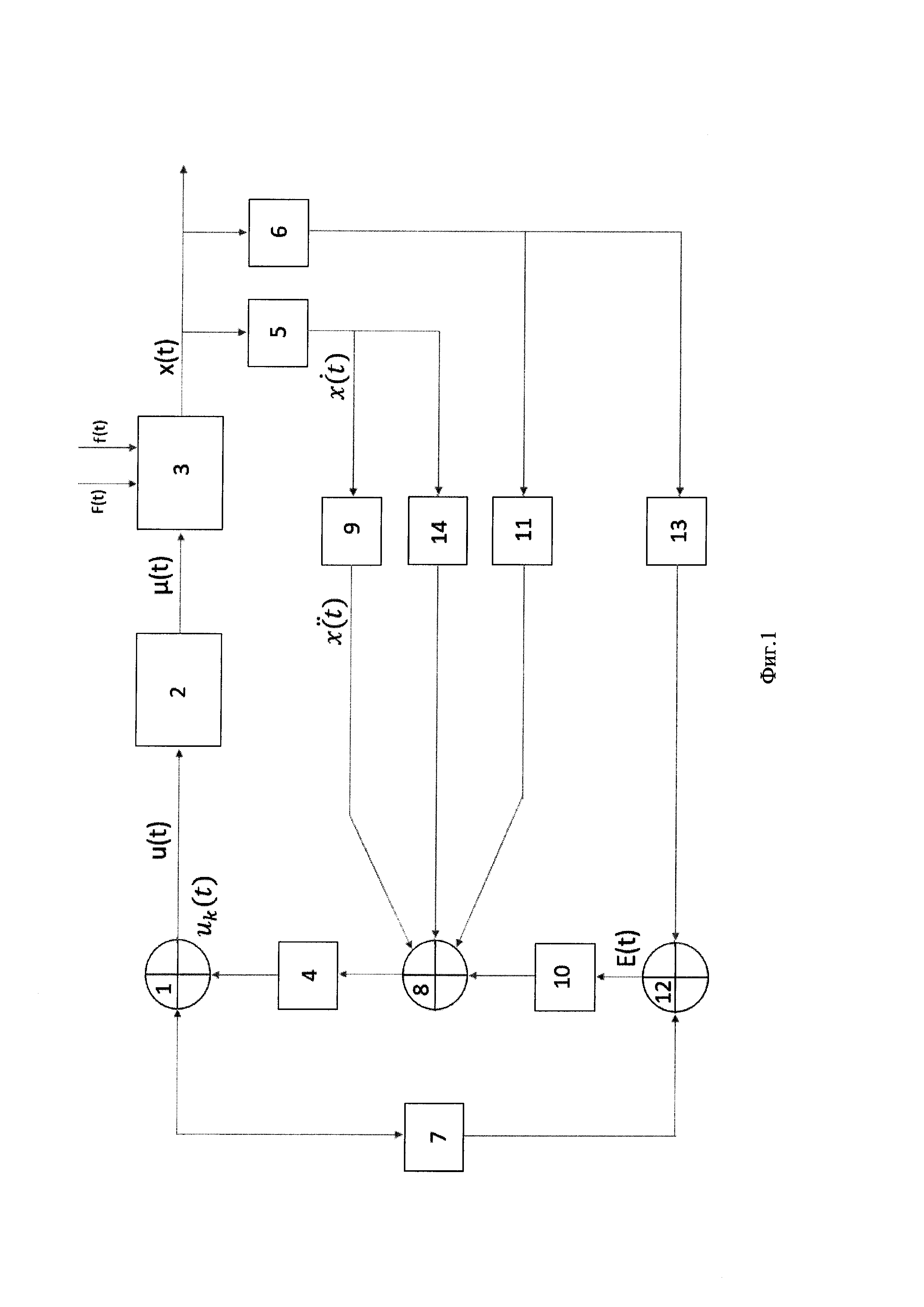
Фотокомпенсационный датчик плотности газов
Каталитический метод определения иридия
Пневматический датчик плотности газов
Киберфизическая система мониторинга высокотехнологичного оборудования
Атактовый строб-фрейм-дискретизатор субнаносекундных радиоимпульсов
Способ получения электропроводящих полимерных пленок на поверхности оксидных стекол для определения содержания оксидов азота в воздушной среде
Материал для электростриктора
Новый полиэтиленгликольсодержащий глицеролипид
Устройство управления интеллектуального модульного реконфигурируемого робота
Способ получения устойчивых искусственных полимерных дисперсий силоксановых каучуков
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Система автоматического управления беспилотным летательным аппаратом по углу рыскания

