Результат интеллектуальной деятельности: Захватный механизм с пятью степенями подвижности
Вид РИД
Изобретение
Предполагаемое изобретение относится к области машиностроения, а именно, к механическим манипуляторам, предназначенным для работы в лабораторных и производственных камерах, исключающих взаимодействие агрессивных веществ на обслуживающий персонал.
Известен захватный механизм, содержащий шаровую опору, смонтированную в ней трубу, в которой размещена с возможностью поступательного перемещения штанга, имеющая на одном конце замковый орган, а на другом - рукоятку управления. Выход трубы из шаровой опоры с стороны рукоятки управления загерметизирован двойным гибким чехлом (1).
Для известного решения характерна недостаточно широкая область обслуживания, поскольку он обладает только тремя степенями подвижности.
Недостатки аналога устранены в принятом за прототип захватном механизме с пятью степенями подвижности, содержащем вмонтированную в стенд камеры шаровую опору, в которой установлена труба с краями, закрепленными в коленах, одно из которых связано с рукояткой управления, а другое со схватом. Между трубой и шаровой опорой, а также между шаровой опорой и стенкой камеры размещены герметизирующие втулки. Выход трубы из шаровой опоры со стороны схвата закрыт гибким чехлом (2). Конструкция прототипа обеспечивает возможность схвату совершать возвратно-поступательные движения, качательное, вращательное вокруг своей оси и вращательное вокруг оси колена, которая перпендикулярна оси трубы. Кроме того, рукоятка управления может также совершать вращательное движение вокруг оси другого колена.
Недостатком прототипа является сравнительно низкая надежность и связанная с этим низкая степень биологической защиты. Поскольку в процессе эксплуатации из-за истирания втулок увеличиваются зазоры между одной втулкой и трубой, а также между другой втулкой и шаровой опорой. По образующимся зазорам становится возможными попадание агрессивных веществ (особенно высокоактивных изотопов) в операторское помещение, так как гибкий чехол один не может исключить проникновение агрессивных веществ в зону работы оператора.
Целью изобретения является повышение степени биологической защиты за счет повышения надежности захватного механизма.
Поставленная цель изобретения достигается тем, что в известный захватный механизм с пятью степенями подвижности, содержащий вмонтированную в стенку камеры шаровую опору, установленную в ней трубку с краями, закрепленными в коленах, одно из которых связано с рукояткой управления, а другое со схватом, герметизирующие втулки, размещенные между шаровой опорой и трубкой, а также между шаровой опорой и стенкой камеры, согласно изобретению введен дополнительный двойной гибкий чехол, герметизирующий выход трубки из шаровой опоры со стороны рукоятки управления, а герметизирующие втулки выполнены с кольцевыми полостями, заполненными поглощающим веществом и образующими кромки втулок, поджимаемые к трубке и шаровой опоре кольцевыми пружинами.
Отличительные от прототипа признаки существенны, так как каждый из них необходим, а все вместе с ограничительными достаточны для достижения поставленной цели. Введение дополнительного двойного гибкого чехла, герметизирующего выход трубки из шаровой опоры со стороны ручки управления, повышает надежность захватного механизма. Так, при одновременном нарушении герметичности гибкого чехла, установленного на выходе трубки из шаровой опоры со стороны схвата и герметизирующих втулок, дополнительный двойной гибкий чехол будет препятствовать проникновению агрессивных веществ в зону работы оператора. Выполнение герметизирующих втулок с кольцевыми полостями придает гибкость кромкам этих втулок, что обеспечивает постоянное плотное поджатие кромок кольцевыми пружинами к трубе и шаровой опоре. Так как на кромки герметизирующих втулок постоянно действуют силы упругости кольцевых пружин, сжимающих кромки, то по мере износа в процессе эксплуатации материала герметизирующих втулок образующийся зазор будет автоматически ликвидироваться. Поглощающее вещество в кольцевых, связывая агрессивные вещества еще в большей степени, повышает степень биологической защиты.
Из отличительных от прототипа признаков двойной гибкий чехол, герметизирующий выход трубки из шаровой опоры со стороны рукоятки управления использован в шпатовом манипуляторе по а.с. СССР №965758 М. кл. B25J 3/00. Выполнение же герметизирующих втулок с кольцевыми полостями, заполненными поглощающим веществом и придающими гибкость кромкам втулок, которые поджимаются к трубе и шаровой опоре кольцевыми пружинами в исследованных аналогах не обнаружено. Следовательно, заявляемый захватный механизм отвечает критерию «существенные отличия».
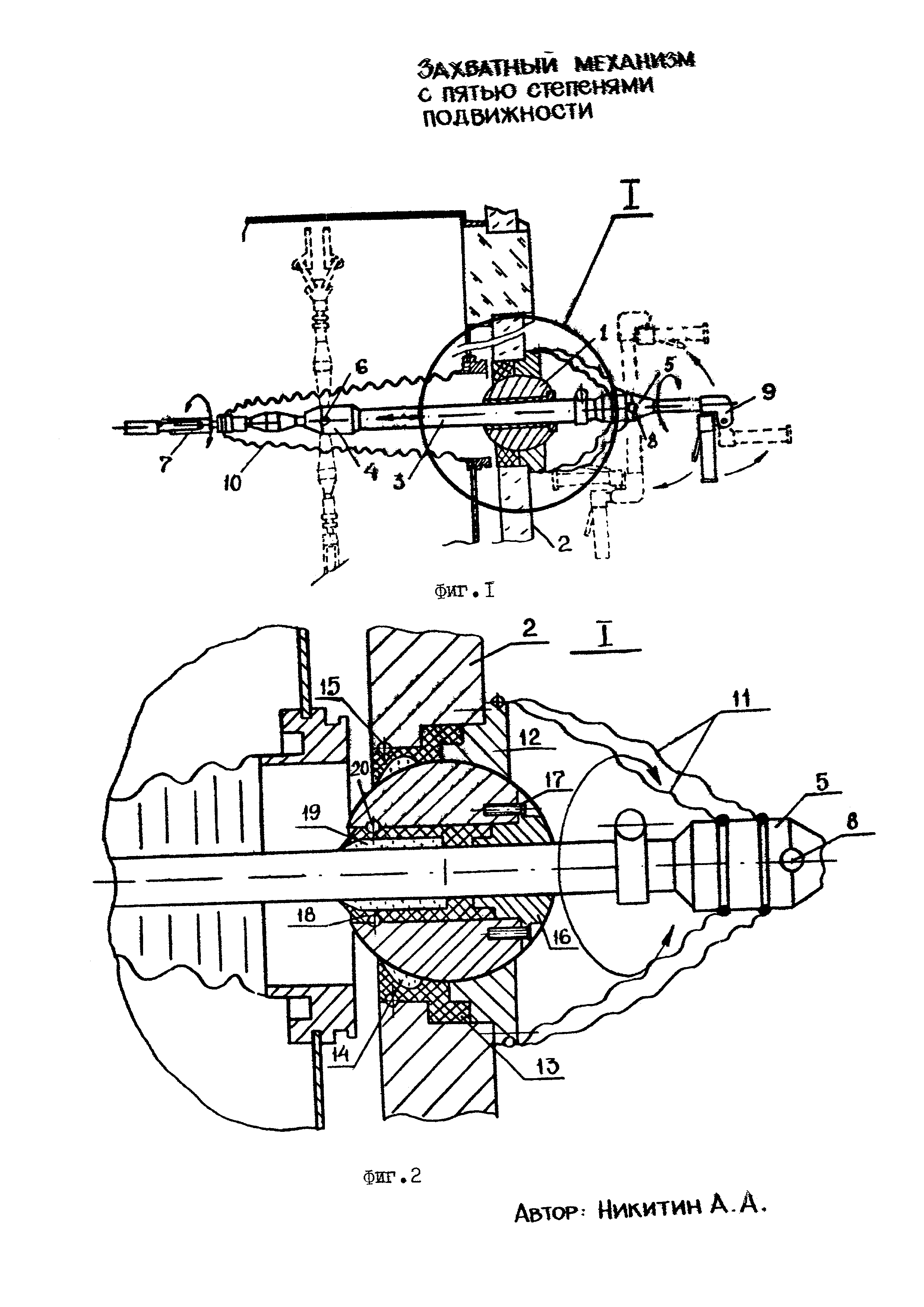
Сущность изобретения пояснена чертежами, где на фиг. 1 изображен общий вид захватного механизма с пятью степенями подвижности, на фиг. 2 - шаровая опора.
Захватный механизм с пятью степенями подвижности содержит шаровую опору 1, вмонтированную в стенку 2 камеры. Через шаровую опору пропущена трубка 3, концы которой закреплены в коленах 4 и 5. Колено 4 шарнирно связано посредством оси 6 со схватом 7, а колено 5 шарнирно связано посредством оси 8 с рукояткой управления 9. Выход трубки 3 из шаровой опоры 1 загерметизирован гибким чехлом 10, закрепленным одним концом на стенке 2, а другим на хвостовике схвата. Противоположный выход трубки 3 загерметизирован дополнительным двойным гибким чехлом 11, концы которого закреплены на колене 5 и прижимном кольце 12. Между стенкой 2 камеры и шаровой опоры 1 установлена фигурная герметизирующая втулка 13, изготовленная из фторопласта. Со стороны шаровой опоры 1 во втулке 13 выполнена полость 14, заполненная поглощающим веществом. Кромки втулки 13, ограничивающие полость 14, поджаты к шаровой опоре кольцевой пружиной 15. Сквозное отверстие в шаровой опоре 1, через которое пропущена трубка 3, со стороны рукоятки управления 9 закрыто упорным кольцом 16, прикрепляемом к шаровой опоре посредством винтов 17. Между шаровой опорой 1 и трубкой 3 установлена фторопластовая герметизирующая втулка 18, выполненная с полостью 19, заполненной поглощающим веществом, например, графитовым порошком. Кромка втулки 18 постоянно поджаты к трубке 3 кольцевой пружиной 20.
Захватный механизм с пятью степенями подвижности работает следующим образом.
При необходимости шаровая опора может совершать вращения в любой вертикальной плоскости. Для этого придают качательные движения рукоятке управления 9, которая через трубку 3 давит шаровую опору 1 и поворачивает ее. При этом противоположный рукоятке управления 9 конец трубки 3 движется в противоположном направлении по отношению к рукоятке управления 9.
Вовратно-поступательные движения схвата 7 совершаются путем возвратно-поступательного движения рукоятки управления 9, вместе с которой перемещается трубка 3. При вращении рукоятки управления 9 вокруг оси трубки 3 вращается сама трубка 3 и вместе с ней схват 7. Кроме того, схват 7 может поворачиваться вокруг оси 6, а рукоятка управления 9 вокруг оси 8. При качательном движении прижимаемые к шаровой опоре 1 кромки втулки 13 очищают от агрессивных веществ поверхность шаровой опоры, то есть исключают попадание этих веществ в зону работы оператора. При возвратно-поступательном и вращательном движении трубки 3 герметизирующие функции выполняет втулка 18. Дополнительная герметизация при всех видах движения осуществляется гибкими чехлами 10 и 11.
По сравнению с прототипом заявляемый механизм характеризуется большей надежностью, так как он оснащен тремя ступенями герметизации: гибкие чехлы на выходе трубки из шаровой опоры и герметизирующие втулки, а прототип оснащен только одной ступенью герметизации - гибким чехлом. Следовательно, у предполагаемого изобретения степень биологической защиты в 3-3,5 раз выше, чем у прототипа.
Захватный механизм с пятью степенями подвижности, содержащий вмонтированную в стенку камеры шаровую опору, установленную в ней трубку с краями, закрепленными в коленах, одно из которых связано с рукояткой управления, а другое со схватом, герметизирующие втулки, размещенные между шаровой опорой и трубкой и между шаровой опорой и стенкой камеры, гибкий чехол, герметизирующий со стороны схвата выход трубки из шаровой опоры, отличающийся тем, что он снабжен дополнительным двойным гибким чехлом, герметизирующим выход трубки из шаровой опоры со стороны рукоятки управления, а герметизирующие втулки выполнены с кольцевыми полостями, заполненными поглощающим веществом и ограниченными кромками втулок, поджимаемыми к трубке и шаровой опоре кольцевыми пружинами.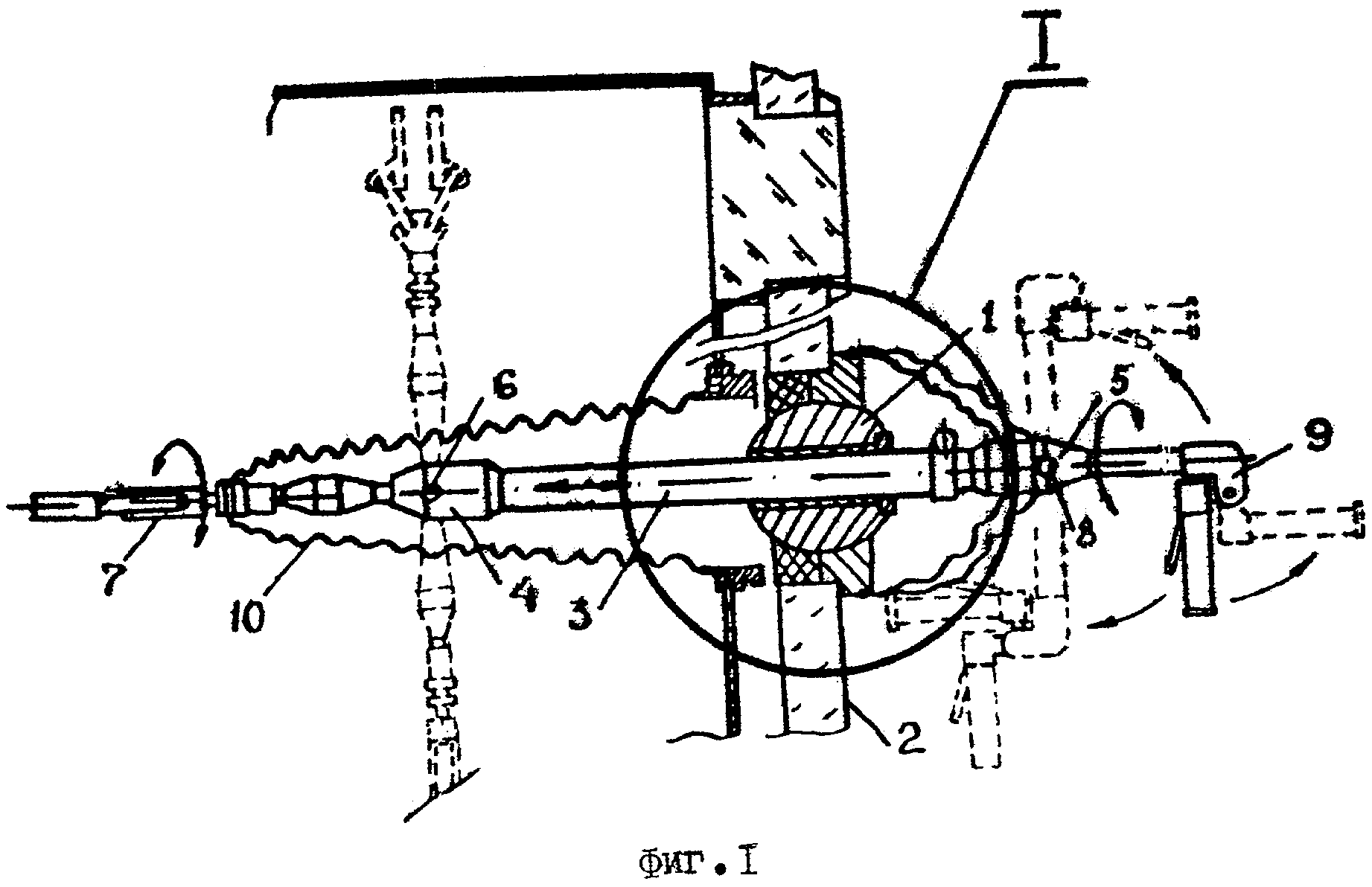
Шпаговый манипулятор
Манипулятор
Динамический манипулятор
Шпаговый манипулятор
Манипулятор, работающий в герметизированном объеме
Манипулятор
Динамический манипулятор
Шпаговый манипулятор
Манипулятор, работающий в герметизированном объеме

