Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности, к способам определения ориентации космических аппаратов (КА).
Способ позволяет вычислять ориентацию КА, оснащенного магнитометром (ММ) и измерителем угловой скорости (ИУС).
Известны различные способы определения ориентации КА с использованием магнитометра. Наиболее часто для определения трехосной ориентации используются способы, основанные на измерении вектора напряженности магнитного поля Земли (МПЗ) и вектора направления на Солнце, как, например, способ, изложенный в книге «Контроль ориентации метеорологических спутников» (Барышев В. А., Крылов Г.Н., Л.: Гидрометеоиздат, 1968). Данный способ включает измерение напряженности МПЗ, измерение параметров орбиты и измерение направления на Солнце. Этот способ позволяет надежно определять трехосную ориентацию КА на участках полета по освещенной Солнцем орбите. Однако при полете КА в тени Земли, где отсутствуют измерения солнечного датчика, данный способ не может быть применен.
Способ, описанный в патенте Российской Федерации RU №2408508, включает измерение напряженности МПЗ и параметров орбиты КА, стабилизацию КА в инерциальном пространстве, фиксацию направления вектора напряженности МПЗ на момент стабилизации, измерение угла между фиксированным и текущим направлениями вектора напряженности МПЗ. Далее фиксируется и запоминается момент достижения измеряемым углом максимального значения и модуль напряженности МПЗ на этот момент. На текущее положение КА на орбите производится расчет модуля напряженности магнитного поля Земли. Выполняется сравнение данного значения модуля напряженности МПЗ с измеренным, и определяется значение магнитной помехи от КА. Ориентация КА определяется по значениям вектора напряженности МПЗ в момент стабилизации КА в инерциальном пространстве и в момент, когда измеряемый острый угол достигает максимального значения, с учетом определенного значения магнитной помехи. Данный способ выбран в качестве прототипа заявленному изобретению.
Техническим результатом данного способа является определение трехосной ориентации КА, предварительно стабилизированного в инерциальном пространстве, по показаниям магнитометра.
Указанный способ имеет следующий недостаток: перед началом измерений требуется производить стабилизацию аппарата в инерциальном пространстве, что не совместимо с ориентацией КА в орбитальной системе координат.
Задачей настоящего изобретения является исключение необходимости стабилизации КА в инерциальном пространстве, приводящее к периодической потере Земли, что недопустимо для спутников слежения и связи, требующих поддержание трехосной ориентации КА в орбитальной системе координат с сохранением постоянной требуемой точности ориентации аппарата на Землю и Солнце для выполнения его целевых функций.
Общими с прототипом признаками заявленного изобретения являются: Способ определения трехосной ориентации космического аппарата, включающий измерение вектора напряженности МПЗ, измерение параметров орбиты КА, запоминание вектора напряженности МПЗ в выбранный момент времени, запоминание углов между запомненным и текущим направлением вектора напряженности МПЗ, фиксацию момента достижения острым измеряемым углом максимального значения, фиксацию вектора напряженности МПЗ на момент достижения острым измеряемым углом максимального значения, определение ориентации КА по значениям вектора напряженности МПЗ на выбранный момент времени и на момент фиксации достижения острым измеряемым углом максимального значения.
Поставленная задача решается тем, что между выбранным моментом времени и моментом фиксации достижения острым измеряемым углом максимального значения измеряют угловые скорости КА, интегрируют систему уравнений Пуассона, по которой определяют матрицу поворота связанной с КА системы координат относительно инерциальной системы координат от выбранного момента времени к текущему моменту времени, вычисляют в момент фиксации достижения острым измеряемым углом максимального значения вектор напряженности МПЗ как произведение полученной матрицы поворота и измеренного в выбранный момент времени вектора напряженности МПЗ, вычисленный вектор напряженности МПЗ используют при определении ориентации КА в момент фиксации достижения острым измеренным углом максимального значения.
Техническим результатом заявленного способа является то, что он позволяет осуществлять определение трехосной ориентации КА по показаниям магнитометра, с использованием информации об угловых скоростях КА.
Суть предлагаемого способа состоит в определении углового положения КА по показаниям ММ и информации ИУС с использованием информации о положении вектора магнитной индукции в инерциальной системе координат (ИСК) и матрицы перехода из ИСК в орбитальную систему координат (ОСК), полученных по информации о параметрах орбиты.
Для определения углового положения КА необходимо не менее двух ориентиров. Магнитометр же дает лишь один ориентир в текущий момент времени, что недостаточно для определения ориентации. Угловое расстояние между ориентирами влияет на точность определения углового положения КА. Если модуль косинуса угла между ориентирами стремится к единице, то определение углов ориентации КА становится невозможным.
Техническая сущность заявленного способа поясняется фиг. 1.
На фиг. 1 штрихпунктирными линиями показаны линии магнитной индукции МПЗ, а также направления векторов магнитной индукции МПЗ В1 и В2 в разных точках орбиты А и Б.
Сущность изобретения заключается в том, что в разных точках орбиты векторы магнитной индукции не коллинеарны (на фиг. 1 угол между векторами В1 и В2, в точках А и Б соответственно, не стремится к нулю). Проблема состоит в том, что КА в точках А и Б находится в разные моменты времени. Она компенсируется интегрированием угловых скоростей КА по уравнениям Пуассона на интервале времени прохождения КА от точки А до точки Б, что позволяет получить в точке Б пару ориентиров в пространстве, для которых модуль косинуса углового расстояния между ними не стремится к единице. Критерием выбора точки Б являются соображения минимизации ошибки определения углового положения КА, величину которой определяет угол между векторами магнитной индукции.
Предложен следующий алгоритм определения углового положения КА (матрицы перехода от ОСК к связанной с КА системе координат).
В момент времени t1 соответствующий положению КА в точке А, производится запоминание в ОЗУ бортового вычислительного комплекса КА
(БЦВК) вектора магнитной индукции  в связанной с КА системе координат (далее ССК) по показаниям ММ, а также вектора магнитной индукции
в связанной с КА системе координат (далее ССК) по показаниям ММ, а также вектора магнитной индукции  в ИСК, получаемого из информации о параметрах орбиты.
в ИСК, получаемого из информации о параметрах орбиты.
Поскольку КА не стабилизирован в инерциальном пространстве, при определении ориентации КА необходимо учесть угловое движение КА в ИСК. Для этого в интервале времени от t1 до t2, соответствующего положению КА в точке Б, производится интегрирование уравнений Пуассона, определяющих эволюцию положения КА из момента времени t1 в момент времени t2 по следующим формулам:








где:
ωх, ωу, ωz- проекции абсолютной угловой скорости КА (по информации от ИУС);
dij - элементы матрицы Т12 (матрицы перехода из ССК в момент времени t1 в ССК в момент времени t2);
dij - производные элементов матрицы Т12.
Начальное значение матрицы Т12 на момент времени t1 принимается равным единичной матрице.
Точка Б на орбите КА выбирается исходя из соображений минимизации ошибки, то есть при достижении углом между измеренными векторами напряженности МПЗ в момент времени t1 и в текущий момент времени максимального значения. Момент достижения острым углом максимального значения t2 фиксируется.
В момент времени t2 (КА находится в точке Б, фиг. 1) производится вычисление матрицы перехода от ОСК к ССК (матрица ТOC) следующим образом (что однозначно определит ориентацию КА в ОСК):

где ТИО - матрица перехода от инерциальной системы координат в орбитальную, получаемая от ПО БЗ;
 - матрица перехода от ИСК к ССК, вычисляемая по двум вспомогательным матрицам;
- матрица перехода от ИСК к ССК, вычисляемая по двум вспомогательным матрицам;
T1 - матрица перехода от промежуточной системы координат OX1Y1Z1 к ИСК;
Т2 - матрица перехода от промежуточной системы координат OX1Y1Z1 к ССК.
Для вычисления матрицы перехода T1 от промежуточной системы координат OX1Y1Z1 к ИСК рассмотрим два вектора напряженности МПЗ в ИСК, в момент времени t1 и t2 соответственно:
Введем промежуточную СК OX1Y1Z1, которая определяется следующим образом:
- ось OX1 направлена параллельно вектору 
- ось OY1 лежит в плоскости, которая задается двумя векторами: 
и  и направлена в сторону вектора
и направлена в сторону вектора 
- ось OZ1 дополняет СК до правой.
Обозначим угол между векторами  и
и  как γ.
как γ.
Определим косинус и синус угла у:


Введем матрицу перехода от промежуточной СК OX1Y1Z1 к ИСК: 
Нетрудно видеть, что:
b1,1=n1,1; b2,1=n1,2; b3,1=n1,3
В промежуточной системе координат вектор  запишется следующим образом:
запишется следующим образом:
для перевода его из промежуточной СК в ИСК умножаем его на матрицу Т1.
Получим:
Из предыдущего уравнения выражаем второй столбец матрицы T1:
Так как матрица T1 ортогональная, то:
Матрица перехода от промежуточной СК OX1Y1Z1 к ССК (матрица Т2) вычисляется аналогично вычислению матрицы Т1, по векторам  и
и 
где:  - вектор магнитной индукции в ССК из момента времени t1 пересчитанный в момент времени t2 при помощи матрицы T12:
- вектор магнитной индукции в ССК из момента времени t1 пересчитанный в момент времени t2 при помощи матрицы T12:
 - вектор магнитной индукции в ССК на момент времени t2 по показаниям ММ.
- вектор магнитной индукции в ССК на момент времени t2 по показаниям ММ.
Эффективность предложенного способа определения трехосной ориентации КА подтверждена имитационным моделированием системы ориентации и стабилизации, имеющей в составе магнитометр и измеритель угловой скорости.
Таким образом, предложенный способ позволяет определять трехосную ориентацию низкоорбитального КА по показаниям ММ при произвольных значениях угловой скорости КА.
Способ определения трехосной ориентации космического аппарата, включающий измерение вектора напряженности магнитного поля Земли (МПЗ), измерение параметров орбиты космического аппарата (КА), запоминание вектора напряженности МПЗ в выбранный момент времени, запоминание углов между запомненным и текущим направлением вектора напряженности МПЗ, фиксацию момента достижения острым измеряемым углом максимального значения, фиксацию вектора напряженности МПЗ на момент достижения острым измеряемым углом максимального значения, определение ориентации КА по значениям вектора напряженности МПЗ на выбранный момент времени и на момент фиксации достижения острым измеряемым углом максимального значения, отличающийся тем, что между выбранным моментом времени и моментом фиксации достижения острым измеряемым углом максимального значения измеряют угловые скорости КА, интегрируют систему уравнений Пуассона, по которой определяют матрицу поворота связанной с КА системы координат относительно инерциальной системы координат от выбранного момента времени к текущему моменту времени, вычисляют в момент фиксации достижения острым измеряемым углом максимального значения вектор напряженности МПЗ как произведение полученной матрицы поворота и измеренного в выбранный момент времени вектора напряженности МПЗ, вычисленный вектор напряженности МПЗ используют при определении ориентации КА в момент фиксации достижения острым измеренным углом максимального значения.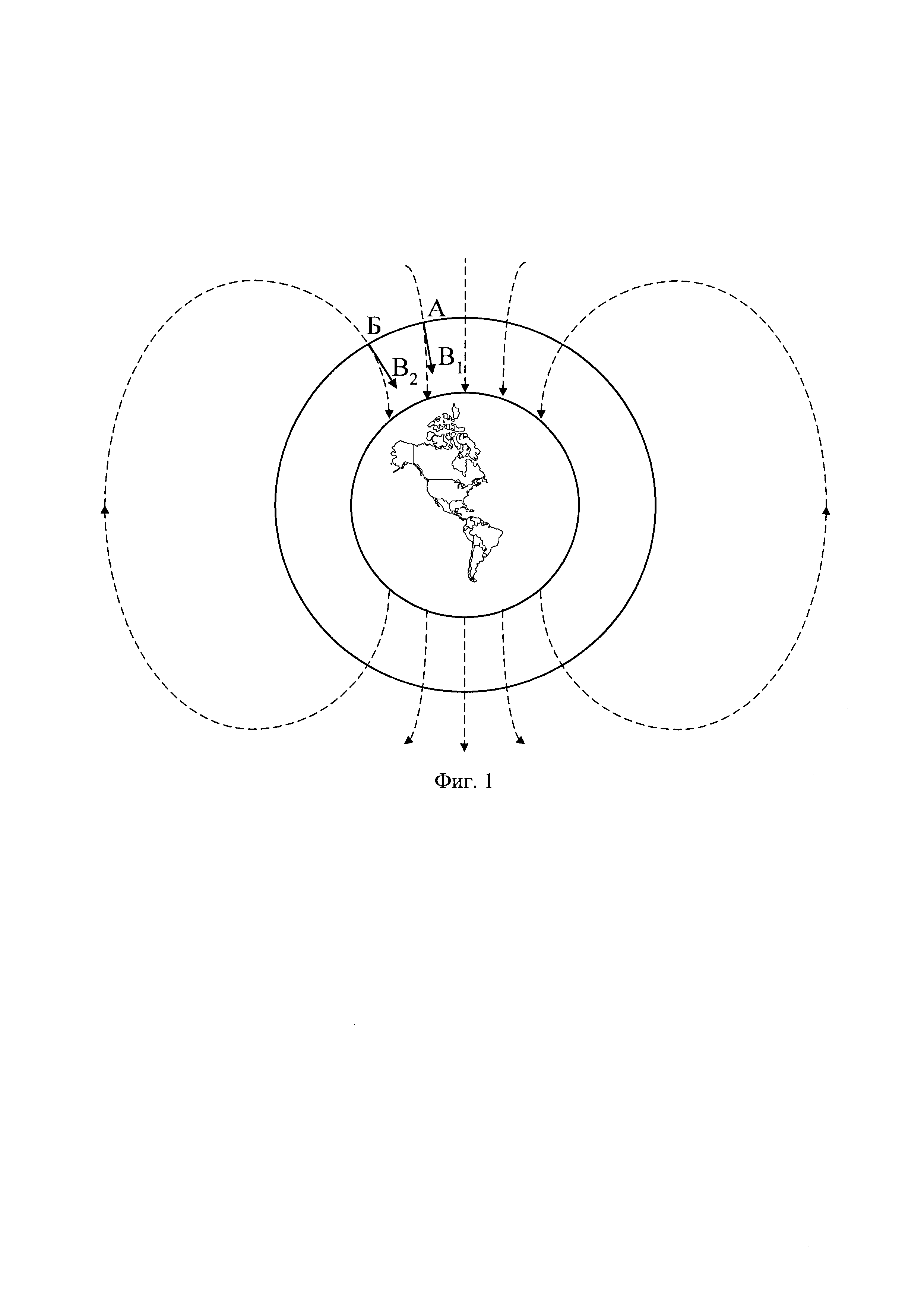
Контроллер сетевого транспортного протокола
Способ функционирования системы испытаний земных станций спутниковой связи
Глобальная система спутниковой связи на средних круговых орбитах
Система обезвешивания
Способ обеспечения бесперебойного охлаждения в чиллерных системах с замкнутым контуром жидкостного охлаждения
Способ поверхностного монтажа электрорадиоизделий радиоэлектронной аппаратуры
Способ изготовления жидкостного контура системы терморегулирования космического аппарата
Способ испытаний системы терморегулирования космического аппарата
Электрический жидкостной ракетный двигатель
Система терморегулирования космического аппарата
Способ определения угловой скорости собственного вращения космического аппарата вокруг центра масс
Способ ориентации космического аппарата в солнечно-земной системе координат
Способ ориентации космического аппарата в солнечно-земной системе координат
Способ ориентации космического аппарата

