Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ РАЗНОСТИ ФАЗ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в системах наблюдения за радиотехнической обстановкой или для измерения разности фаз между сигналами.
Известен способ измерения разности фаз, в котором после усиления и ограничения двух сигналов осуществляется их фазовая демодуляция в сигналы пропорциональные SinΔϕ, CosΔϕ, преобразование их в цифровой двоичный код и вычисление разности фаз Δϕ в цифровом виде сравнением SinΔϕ, CosΔϕ с нулем, модулей SinΔϕ, CosΔϕ между собой и вычислением arctg  (Смирнов В.Н. Быстродействующий цифровой фазометр с ортогональной обработкой сигналов, «ВСРЭ», сер ТИПР, 1984, вып. 3).
(Смирнов В.Н. Быстродействующий цифровой фазометр с ортогональной обработкой сигналов, «ВСРЭ», сер ТИПР, 1984, вып. 3).
В реальных условиях функции y(C)=SinΔϕ и y(S)=CosΔϕ лишь близки к идеальным и, поэтому при вычислении  появляется регулярная (периодическая) ошибка, имеющая восемь периодов в интервале от 0° до 360° и достигающая 8° (экспериментальные данные и результаты математического моделирования).
появляется регулярная (периодическая) ошибка, имеющая восемь периодов в интервале от 0° до 360° и достигающая 8° (экспериментальные данные и результаты математического моделирования).
При демодуляции сигналов может возникнуть также дополнительное смещение, которое приводит к дополнительной ошибке измерения разности фаз.
Таким образом, недостатком такого способа измерения разности фаз являются повышенные ошибки измерения при наличии постоянного смещения после демодуляции сигналов по фазе и в случае неточного вычисления Sin, Cos функций, например, при линейной демодуляции.
Целью изобретения является повышение точности в способе измерения разности фаз.
Поставленная цель достигается тем, что для уменьшения или исключения этих ошибок необходимо измерить постоянную составляющую после преобразования в двоичный код в отсутствие сигнала и компенсировать ее, а вместо функции arctg, обратную функции tg, использовать функцию обратную линейной, так как для вычисления функций, близких к Sin, Cos, часто используется линейное детектирование.
В способе измерения разности фаз каждый из двух радиосигналов усиливается и ограничивается по амплитуде, затем вычисляются функции, близкие к SinΔϕ и CosΔϕ и каждый из этих видеосигналов преобразуется в цифровой код. Затем по каждой составляющей в отсутствие сигнала осуществляется в цифровом виде вычисление, запоминание и компенсация постоянного напряжения и только после этого осуществляется формирование линейного выходного двоичного кода сравнением цифровых кодов с нулем для формирования двух старших двоичных разрядов, сравнением цифровых кодов по модулю между собой для формирования третьего двоичного разряда и вычисление из цифровых кодов остальных младших разрядов вычислением обратной функции от линейной функции с последующим присоединением их к старшим разрядам.
Для примера приведен расчет ошибок, возникающих из-за наличия смещения Uсм после фазового детектирования:  где Δϕ - измеряемая разность фаз; A1⋅A2 - амплитуды сигналов после ограничения; К - коэффициент пропорциональности. Ошибка δϕ, возникающая при сравнении с нулем, вычисляется следующим образом:
где Δϕ - измеряемая разность фаз; A1⋅A2 - амплитуды сигналов после ограничения; К - коэффициент пропорциональности. Ошибка δϕ, возникающая при сравнении с нулем, вычисляется следующим образом:


Если Uсм=0 δϕ=0

При введении компенсации Uсм δϕ=0.
Покажем также возможность вычисления с обратной линейной функцией.
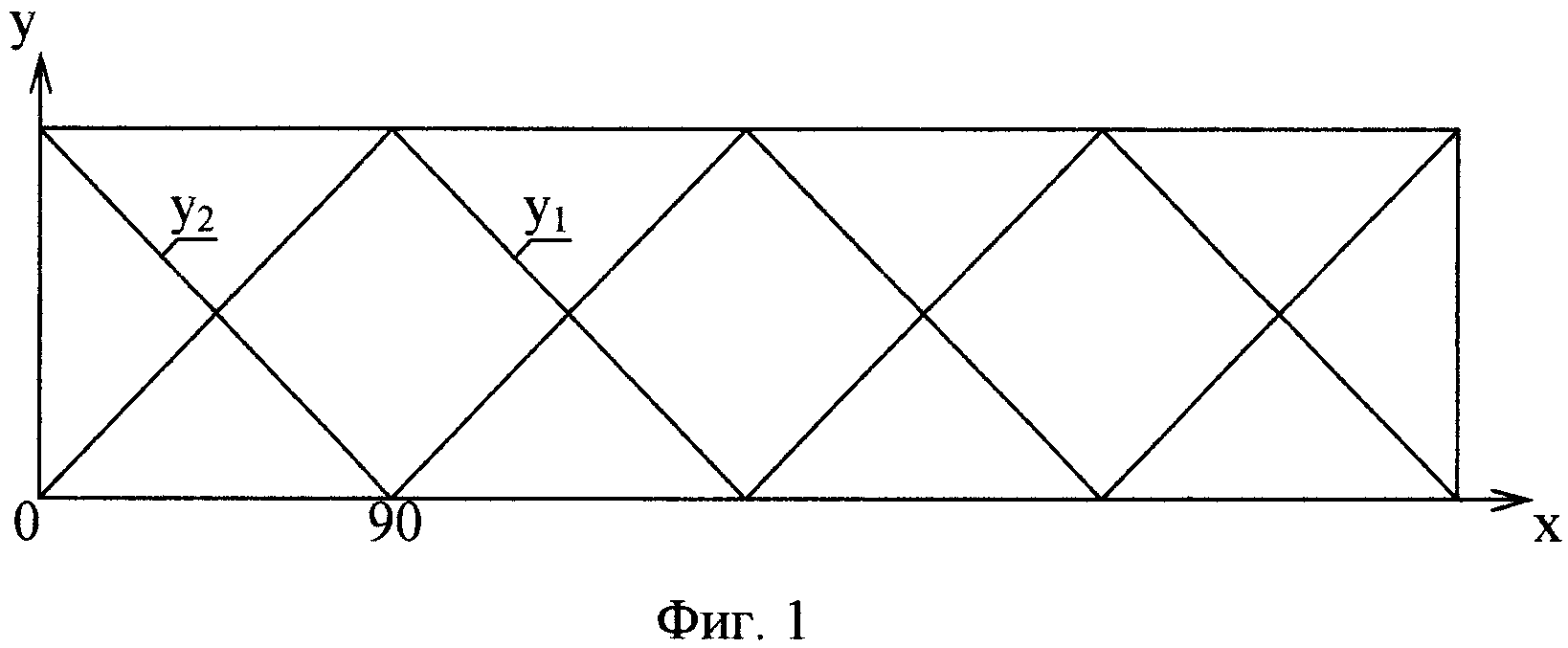
На фиг. 1 показаны модули сигналов с линейным детектированием.
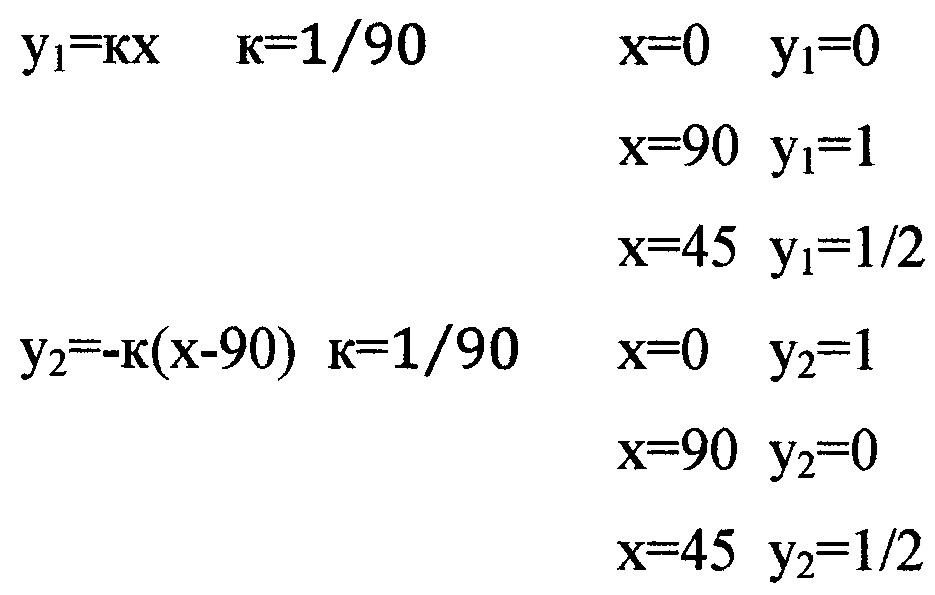
Разрешая систему из y1 и у2 можно получить 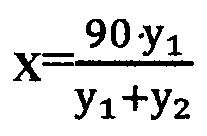 . Это и есть обратная функция.
. Это и есть обратная функция.
Таким образом, компенсация постоянной составляющей после демодуляции с последующим преобразованием и применение функции обратной линейной отражают технический результат изобретения.
Способ измерения разности фаз, в котором каждый из двух радиосигналов усиливается и ограничивается по амплитуде, затем вычисляются функции, близкие к SinΔϕ, CosΔϕ, и преобразуются, соответственно, в цифровой код, отличающийся тем, что после преобразования вначале осуществляется вычисление, запоминание и компенсация постоянного напряжения в отсутствие радиосигналов, а затем осуществляется формирование старших разрядов выходного кода сравнением цифровых кодов с нулем, между собой по модулю и вычисление младших разрядов вычислением обратной функции от линейной функции с последующим присоединением их к старшим разрядам.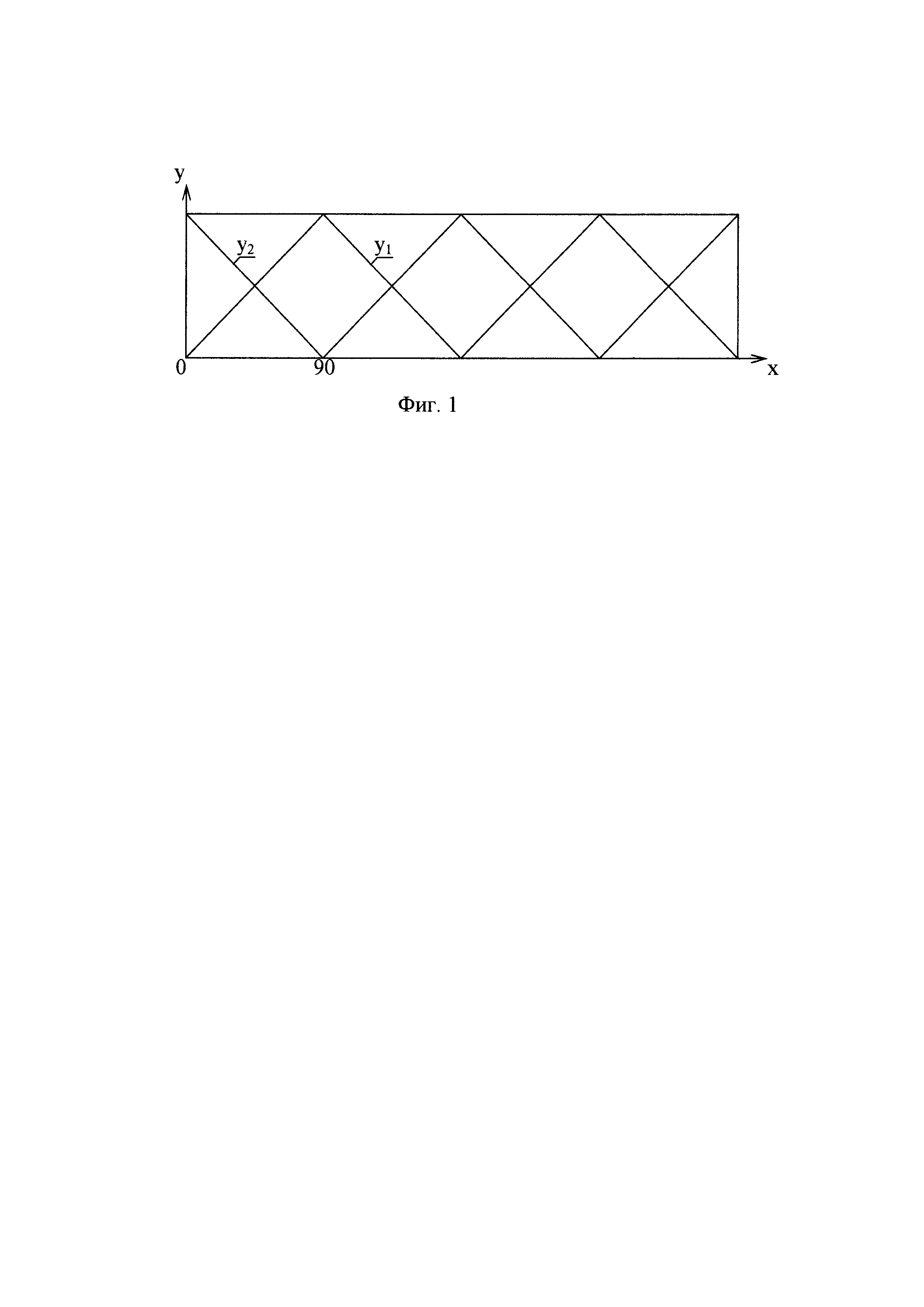
Спиральная антенна
Всенаправленная кольцевая антенна
Сверхширокополосное радиопоглощающее покрытие
Совмещенная пассивно-активная антенная система
Сверхширокополосная логопериодическая антенна
Способ измерения частоты сигналов
Спиральная антенна
Фазовый пеленгатор
Рупорная антенна
Сверхширокополосная спиральная антенна
Радиопеленгатор
Фазовый пеленгатор
Фазовый пеленгатор
Устройство контроля протекания тока
Самофиксирующийся электронный ключ
Способ диагностики развития стенозирования стентов
Способ измерения частоты сигналов
Схема подключения пиросредств
Фазовый пеленгатор
Устройство компенсации нестабильности несущей частоты фазоманипулированных сигналов

