Результат интеллектуальной деятельности: Вакуумный манипулятор
Вид РИД
Изобретение
Предлагаемое изобретение относится к области машиностроения, а именно, к конструкциям манипуляторов, работающих в сверхвысоком вакууме с особо чистыми материалами.
Известен манипулятор, работающий в герметизированном (вакуумированном) объеме (а.с. №1274922 М. кл. 4 B25J 21/00), содержащий корпус, в котором смонтированы привод поступательного движения исполнительного органа в виде винтового механизма и связующего его с исполнительным органом штока с сильфонным компенсатором, привод вращательного движения исполнительного органа в виде задающего генератора, ведомого генератора и связующей их упруго-деформируемой трубы, закрепленной на гибкой диафрагме, отделяющей рабочее пространство манипулятора от нерабочего, а также привод качательного движения исполнительного органа в виде системы рычагов, связанных со штоком и исполнительным органом. Шток с сильфонным компенсатором установлен внутри упруго-деформируемой трубы привода вращательного движения, закреплен на гибкой диафрагме и снабжен контролирующей аппаратурой и двумя наружными гибкими диафрагмами, расположенными параллельно друг другу и установленными со смещением относительно гибкой диафрагмы упруго-деформируемой трубы и герметично соединенными с ней и со стенкой герметизированного объема, образуя при этом компенсирующую герметичную полость, сообщенную каналом, выполненным в стенке герметизированного объема, с вакуумной контролирующей аппаратурой.
Наиболее близким по технической сущности к предполагаемому изобретению (прототипом) является манипулятор, работающий в герметизированном объеме (см. книгу М.И. Медникова «Вводы движения в вакуум», М. 1974 г., с. 98-100), выполненный в виде комбинированного сильфонного ввода поступательного и качательного движений, с помощью которого можно передать размещенному в высоком вакууме предметному столику поступательное вертикальное перемещение, горизонтальное перемещение в двух взаимно перпендикулярных направлениях и поворот относительно горизонтальной оси. К фланцу, установленному на вакуумной камере и герметизированному с помощью медной прокладки, герметично приварены стакан и диск, к которому приварена гирлянда из двух сильфонов, к которой в нижней ее части приварен опорный стакан, закрепленный винтами во фланце юстировочного механизма. Юстировочный механизм этого манипулятора монтируется на плите, которая с помощью установочных шпилек закрепляется в опорах фланца.
Внутри стакана размещен сильфонный ввод поступательного движения с двумя последовательно сваренными сильфонами, один из которых приваривается к стакану, а другой приваривается к пробке с ввернутыми в нее штоками в вакууме и в атмосфере. На штоке в нижней его части нарезана резьба, с помощью которой он находится в зацеплении с гайкой-маховиком, а также имеется шпоночный паз и стопорный винт для предотвращения штока от вращения. Пружина на штоке обеспечивает последнему необходимый предварительный натяг и выбор зазора в резьбе. К штоку в верхней его части крепится рычаг, который может поворачивать опору предметного столика относительно осей в рамке, установленной на стенке.
Таким образом, вертикальные (установочные) перемещения предметного столика этого манипулятора могут быть осуществлены за счет движения плиты вместе с котировочным механизмом относительно фланца, при этом сильфоны испытывают осевые деформации.
Горизонтальные перемещения предметного столика этого манипулятора в двух взаимно перпендикулярных направлениях создаются при вращении маховиков и юстировочного механизма, при этом аналогичные перемещения получает стакан, который при этом изгибает гирлянду наружных сильфонов относительно диска.
Данная конструкция манипулятора может обеспечить качание исполнительного органа, выполненного в виде предметного столик, на угол 90°, горизонтальное перемещение в двух направлениях на величину до 25 мм и установочное вертикальное перемещение на величину до 10 мм.
Точность горизонтальных перемещений этого манипулятора может достичь до +-0,005 мм, а точность качательного перемещения может быть равной +-1°.
Однако, общим недостатком таких манипуляторов является низкая надежность герметизации из-за газонатекания в вакуумный объем через тонкие стенки сильфонов и невысокая стабильность качественных характеристик рабочей среды, что приводит к снижению качества выпускаемой продукции.
Технология изготовления электронных приборов и обработки радиоактивных, токсических и взрывчатых веществ, переработка особо чистых материалов, а также осуществление ряда дистанционных работ, производимых в открытом космосе и в медицине, во многих случаях основана на сложных комплексных процессах, выполняемых в высоком вакууме в едином технологическом цикле на автоматических и поточных линиях многопозиционных установок камерного типа. Осуществление автоматичского цикла работы такого оборудования - технически сложная задача. В тех случаях, когда технологический процесс обработки изделий построен не только на выполнении определенного комплекса физико-химических процессов, но и требует некоторых механических или силовых воздействий на обрабатываемые изделия, а также их относительного перемещения внутри герметизированных технологических объемов, оборудование должно быть оснащено исполнительными механизмами. Например, манипуляторами, работающими в вакуумном объеме. Однако, при работе введенных в вакуум исполнительных механизмов этих манипуляторов из-за выделения ими же самими продуктов износа может быть нарушена стерильность вакуумной рабочей среды, чо неблагоприятно воздействует на протекание основного процесса обработки и качество выпускаемой продукции.
Известно, что высокий вакуум оказывает влияние на материалы. Так, материалы, помещенные в вакуум, испаряются: в вакууме повышается адгезия (сцепление), увеличиваются коэффициенты трения контактирующих поверхностей, ухудшаются условия теплопередачи, изменяются механические (пластичность, усталостная прочность и др.), а также электрические свойства материалов. Работающие в технологическом вакууме исполнительные механизмы ухудшают качественные характеристики рабочей среды, определяющей объемы, себестоимость и качество выпускаемой продукции.
Данные манипуляторы обеспечивают передачу нескольких движений в герметизированный объем. Дальнейшая трансформация этих движений происходит внутри вакуумного объема. Преобразование движений в рабочем объеме связано с введением в схему манипулятора исполнительного механизма кинематических пар и соединений, работающих в условиях сухого трения. Работа таких кинематических пар в вакууме характеризуется низкой надежностью, снижением точности, потерей числа кинематических подвижностей, появлением добавочных напряжений и деформаций, которые являются следствием сложных процессов разрушения, возникающих в зонах контакта поверхностей трения движения.
Технический результат, обеспечиваемый изобретением, заключается в повышении качества выпускаемой продукции за счет повышения надежности конструкции привода комбинированного сильфонного ввода движений и стабилизации качественных характеристик рабочей среды.
Результат достигается тем, что в вакуумном манипуляторе, содержащем крышку вакуумной камеры, на которой смонтирован механизм ручного привода комбинированного сильфонного ввода движений и исполнительный орган, сильфоны механизма ручного привода комбинированного сильфонного ввода движений разделены между собой герметичной полостью, образованной в крышке вакуумной камеры, и соединенной каналом с вакуумной контролирующей аппаратурой.
Разделение сильфонов механизма ручного привода комбинированного сильфонного ввода движений герметичной полостью, образованной в крышке вакуумной камеры, и соединенной каналом с вакуумной контролирующей аппаратурой, позволит повысить надежность в работе конструкции всего манипулятора за счет полного исключения газонатекания в рабочей среде камеры, а также за счет полного исключения из него люфтов, зазоров и кинематических пар трения движения. Это позволит значительно повысить степень надежности (герметизации) манипулятора, а также стабилизировать на заданных плановых уровнях качественные характеристики рабочей среды, определяющей в конечном итоге объемы, себестоимость и качество выпускаемой продукции.
Такое конструктивное решение обеспечивает удобство работы оператора, кинематическую точность, маневренность и быстродействие всего манипулятора, что является немаловажным фактором, определяющим предназначение и диапазон возможностей использования манипулятора.
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать выводы о соответствии критерию «существенные отличия».
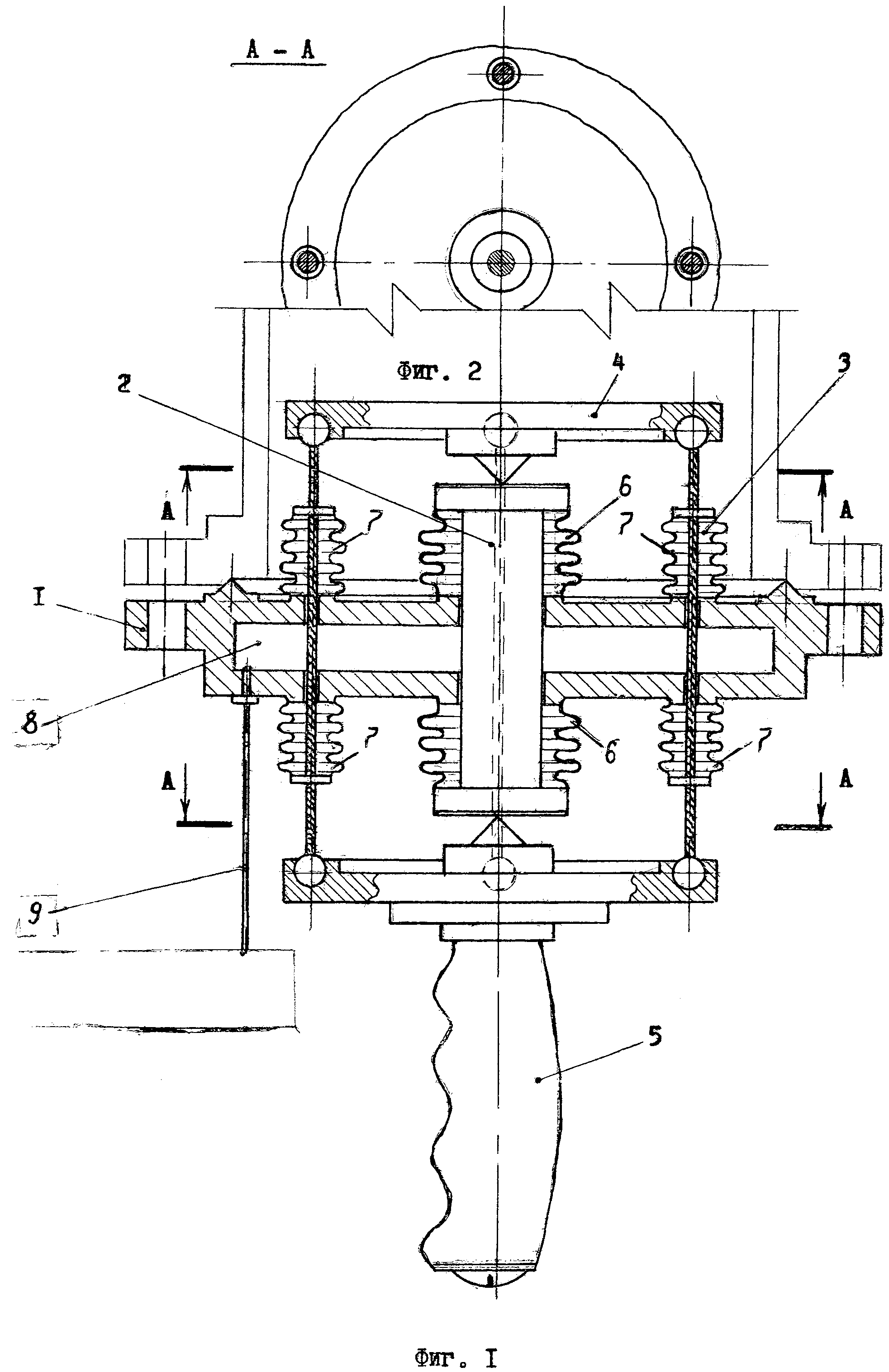
На фиг. 1 изображен общий вид вакуумного манипулятора в разрезе. На фиг. 2 разрез А-А на фиг. 1.
Вакуумный манипулятор содержит крышку 1 вакуумной камеры, на которой смонтирован механизм ручного привода комбинированного сильфонного ввода поступательного 2 и качательного 3 движений исполнительного органа 4 (предметного столика), связывающий последний с рукояткой управления 5 манипулятора через крышку 1 вакуумной камеры. Сильфоны 6 и 7 механизма ручного привода комбинированного сильфонного ввода поступательного 2 и качательного 3 движений соответственно разделены между собой герметичной полостью 8, образованной в крышке 1 вакуумной камеры, и соединенной каналом 9 с вакуумной контролирующей аппаратурой 10.
Все устройство смонтировано на фланце стенки вакуумной камеры.
Вакуумный манипулятор работает следующим образом.
При поступательном движении исполнительный орган 4 получает вертикальное поступательное перемещение от рукоятки управления 5 привода комбинированного сильфонного ввода поступательного 2 движения. Сильфоны 6, разделенные между собой герметичной полостью 8, надежно герметизируют передачу поступательного вертикального движения исполнительному органу 4 и отделяют рабочее пространство манипулятора (вакуумированный объем) от нерабочего (со стороны рукоятки 5 управления).
При качательном движении исполнительный орган 4 получает качательное (горизонтальное) перемещение от рукоятки 5 привода комбинированного сильфонного ввода качательного 3 движения. Сильфоны 7, разделенные между собой герметичной полостью 8, надежно герметизируют передачу качательного (горизонтального) движения исполнительному органу 4 и отделяют, также как и сильфоны 6, рабочее пространство манипулятора от нерабочего.
При этом разряжение воздуха в герметичной полости 6, образованной в крышке 1 вакуумной камеры, контролируется измерительно-сигнализирующим устройством контролирующей аппаратуры 10, следящей за необходимой степенью разряжения в полости 8 и ее герметизацией.
ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
Техническими преимуществами заявляемого манипулятора по сравнению с прототипом являются высокая надежность конструкции механизма ручного привода комбинированного сильфонного ввода поступательного и качательного движений, обусловленная отсутствием газонатекания в рабочую среду (вакуумированный объем) благодаря наличию герметичной полости в крышке вакуумной камеры, разделяющей сильфоны привода движений друг от друга и компенсирующей перепад давлений в рабочем и нерабочем пространствах манипулятора, и сохранения высокой стабильности качественных характеристик рабочей среды, что значительно улучшает качество выпускаемой продукции.
Контроль за разряжением воздуха в герметичной полости позволяет своевременно выявлять возможную разгерметизацию манипулятора в случае усталостного разрушения одного из герметизирующих элементов (сильфонов) комбинированного сильфонного ввода движений.
Манипулятор с вакуумной камерой, содержащий исполнительный орган, выполненный с возможностью поступательного и качательного движений посредством ручного привода с сильфонами, отличающийся тем, что вакуумная камера выполнена с крышкой, имеющей герметичную полость, выполненную с возможностью разрежения в ней воздуха и соединенную каналом с вакуумной контролирующей аппаратурой, обеспечивающей слежение за степенью разрежения в упомянутой герметичной полости, а ручной привод поступательного и качательного движений исполнительного органа смонтирован на крышке вакуумной камеры и выполнен в виде рукоятки управления, связанной с исполнительным органом сильфонами, которые разделены между собой упомянутой герметичной полостью крышки.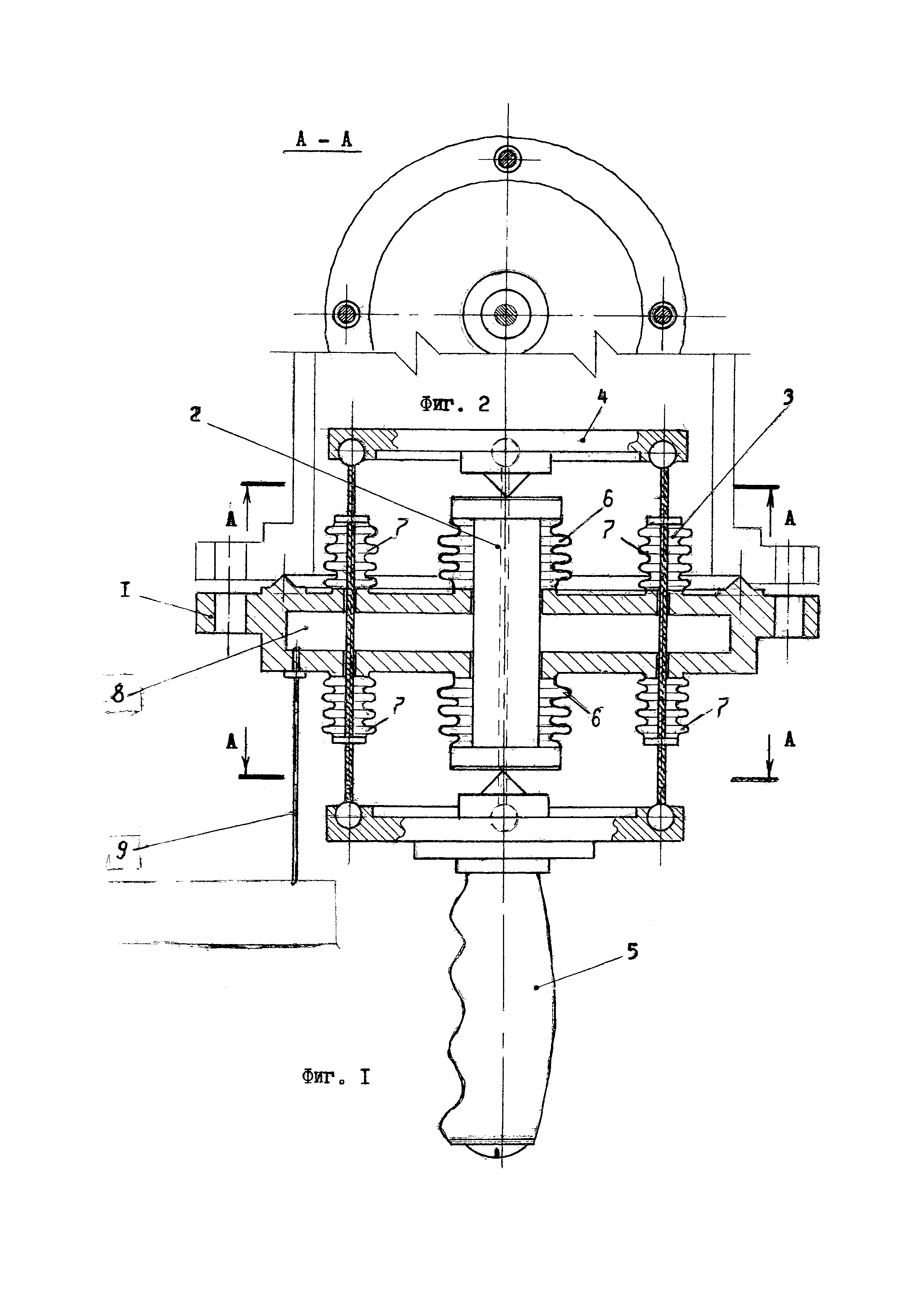
Шпаговый манипулятор
Шпаговый манипулятор
Динамический манипулятор
Перемешивающее устройство
Шпаговый манипулятор
Перемешивающее устройство
Шпаговый манипулятор
Захватный механизм с пятью степенями подвижности
Устройство для лазерной обработки изделий
Гибкий исполнительный орган манипулятора
Шпаговый манипулятор
Динамический манипулятор
Перемешивающее устройство
Шпаговый манипулятор
Перемешивающее устройство
Шпаговый манипулятор
Захватный механизм с пятью степенями подвижности
Устройство для лазерной обработки изделий
Гибкий исполнительный орган манипулятора
Гибкий элемент волновой передачи

