Результат интеллектуальной деятельности: СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано при построении радиолокационных рельефометрических систем (РРС), предназначенных для определения местоположения летательных аппаратов (ЛА) в соответствии с корреляционно-экстремальным принципом навигации [1].
Реализация данного принципа заключается в составлении текущей карты местности (ТКМ) по данным измерений параметров мерного участка подстилающей поверхности однолучевым или многолучевым радиолокатором с последующим сравнением ТКМ с эталонной картой местности (ЭКМ), находящейся на борту ЛА до начала его движения. Вычисляют сигнал коррекции местоположения ЛА на основе анализа различий (взаимных смещений) ЭКМ и ТКМ мерного участка. Управляют движением ЛА путем коррекций его местоположения.
Известен способ автономной навигации ЛА [2] на основе РРС с использованием радиоволн, излучающихся последовательно в виде нескольких лучей, выбранный за аналог.
Определение местоположения ЛА в рамках данного способа осуществляется в плановых координатах мерного участка на основе измерений наклонных дальностей ЛА до подстилающей поверхности, сигнал коррекции вычисляют в соответствии с дифференциально-разностным алгоритмом обработки многолучевых измерений (ДРАОМИ) [2].
Недостатки способа [2] следующие:
- низкая помехоустойчивость;
- низкая скрытность работы РРС;
- низкое быстродействие определения текущего местоположения ЛА;
- ограничение применения способа навигации на минимальных высотах полета ЛА над мерным участком.
Причиной первого недостатка является узкий спектр используемых сигналов, что позволяет подавлять сигналы РРС прицельными узкополосными помехами.
Причиной второго недостатка является высокая мгновенная мощность используемых сигналов, время излучения которых при прохождении мерного участка равно суммарному времени излучения по всем лучам.
Причиной третьего недостатка является последовательный переход излучения и приема радиоволн с одного луча на другой луч, при котором за время излучения и приема по одному лучу ЛА перемещается относительно отражающей поверхности и в результате при излучении и приеме радиоволн по другим лучам пятно засветки, дальность до которого определяется, оказывается смешено вперед по курсу полета ЛА. Это приводит к зависимости точности определения текущего местоположения ЛА от скорости его движения и длительности излучаемых радиоволн. Следовательно, несмотря на то, что увеличение точности определения местоположения ЛА происходит с увеличением количества лучей из-за существенного увеличения поступающей информации за один такт измерения, максимальное число используемых лучей радиоволн при их последовательном излучении определяется допустимым временем измерения местоположения ЛА при движении над мерным участком исследуемой поверхности.
Причиной четвертого недостатка является наличие «мертвой» зоны РРС, величина которой определяется длительностью излучаемых в каждом луче радиоволн, а также суммарным временем перехода РРС как из режима излучения радиоволн в режим приема отраженных радиоволн в пределах одного луча, так и перехода с одного луча на другой.
Известен способ автономной навигации ЛА [3], позволяющий повысить быстродействие навигации ЛА и точность определения его местоположения при движении над мерным участком, в том числе на малых высотах полета ЛА, выбранный за прототип.
Данный способ навигации ЛА поясняют рисунки, приведенные на фиг. 1, фиг. 2 и фиг. 5а-фиг. 5 г. Реализация способа [3] заключается в определении наклонных дальностей ЛА до земной поверхности по нескольким лучам, в каждом из которых излучают и принимают радиоволны в виде последовательности радиоимпульсов (фиг. 2), начальные фазы которых модулированы М-последовательностью (МП), ортогональной модулирующим М-последовательностям радиоволн в других лучах, при этом радиоволны излучают одновременно на общей для всех лучей частоте. Лучи радиоволн излучают и принимают, как показано на фиг. 1а, следующим образом. Луч 1 направлен вертикально вниз, перпендикулярно плоскости исследуемой поверхности (фиг. 1а, поз. 1), луч 2 располагается слева от луча 1 по направлению движения ЛА (фиг. 1а, поз. 2), а луч 3 - справа (фиг. 1а, поз. 3), причем все лучи располагают в одной вертикальной плоскости. Отраженные волны разделяют по лучам и определяют наклонные дальности корреляционным способом с использованием модулирующих М-последовательностей в качестве опорных функций (фиг. 5а - фиг. 5г) или способом согласованной фильтрации с использованием модулирующих М-последовательностей в качестве весовых коэффициентов. По данным о наклонных дальностях составляют ТКМ мерного участка и сравнивают ее с ЭКМ занесенной в бортовую аппаратуру перед движением ЛА.
Точность определения текущего местоположения ЛА может быть повышена за счет увеличения количества используемых лучей. Для малых высот полета прием отраженных волн проводится по одному широкому лучу, как показано на фиг. 16 (поз. 4), при этом излучение и прием радиоволн возможны с перекрытием по времени.
В результате способ навигации [3J позволяет получать информацию, необходимую для определения текущего местоположения ЛА и управления его движением, за время излучения и приема радиоволн по одному лучу, а не за суммарное время излучения и приема радиоволн по всем лучам, как это сделано в аналоге.
Недостатки способа [3] следующие:
- низкая помехоустойчивость;
- недостаточная скрытность работы РРС;
- не высокая разрешающая способность по дальности;
- недостаточная точность определения дальности.
Причиной первого недостатка является уязвимость РРС к воздействию прицельных помех.
Причиной второго недостатка является значительная мгновенная мощность парциальных радиоимпульсов.
Причиной третьего недостатка является отсутствие практической возможности формирования парциальных радиоимпульсов длительностью менее 1-2 наносекунд.
Причиной четвертого недостатка является наличие боковых лепестков взаимно-корреляционных функций модулирующих МП, величина которых ограничивает количество используемых лучей РРС.
Техническим результатом предлагаемого изобретения является повышение скрытности, помехоустойчивости и разрешающей способности по дальности, а также точности определения наклонных дальностей в радиолокационных рельефометрических системах маловысотных летательных аппаратов.
Технический результат достигается тем, что в способе автономной навигации маловысотных летательных аппаратов, включающем определение наклонных дальностей летательного аппарата до земной поверхности, заключающемся в излучении радиоволн в виде нескольких лучей и последующем приеме отраженных радиоволн по одному широкому лучу, радиоволны в каждом из лучей излучают одновременно в виде статистически независимых широкополосных шумовых сигналов, отраженные радиоволны разделяют по лучам и определяют наклонные дальности летательного аппарата до земной поверхности корреляционным способом с использованием части излучаемых по каждому лучу шумовых сигналов в качестве опорных функций.
Технический результат достигается тем, что излучаемые шумовые сигналы имеют нормальное распределение плотности вероятности и непрерывны во времени.
Способ автономной навигации маловысотных летательных аппаратов поясняют следующие рисунки.
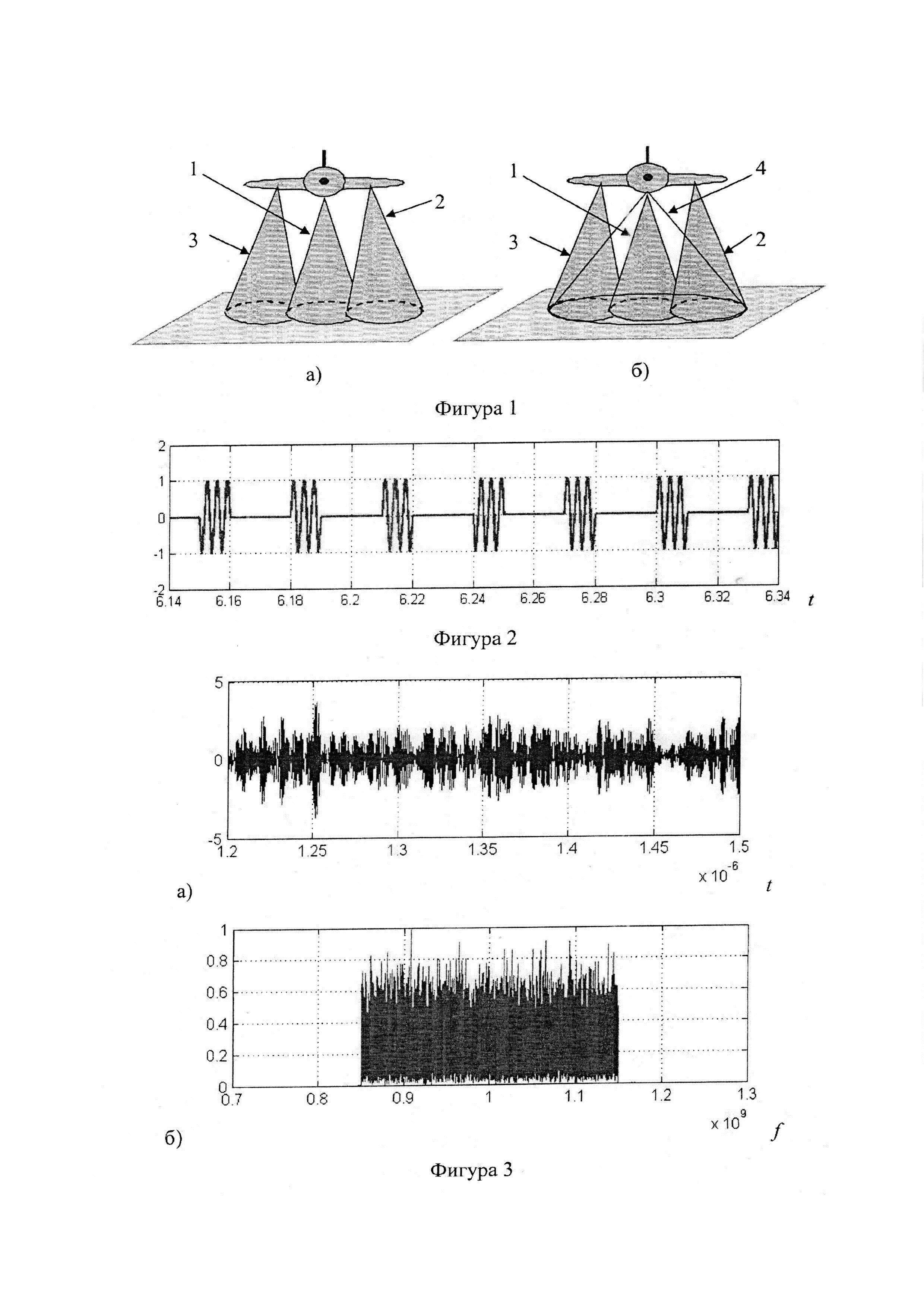
Фигура 1. Схема расположения лучей летательного аппарата относительно мерного участка земной поверхности для 3-х лучевой рельефометрической системы при приеме отраженных волн по 3-м лучам (а) и при приеме отраженных волн по одному широкому лучу (б).
Фигура 2. Сигнал одного из лучей в виде последовательности фазоманипулированных радиоимпульсов.
Фигура 3. Широкополосный шумовой сигнал одного луча РРС - временная форма (а), спектральная форма (б).
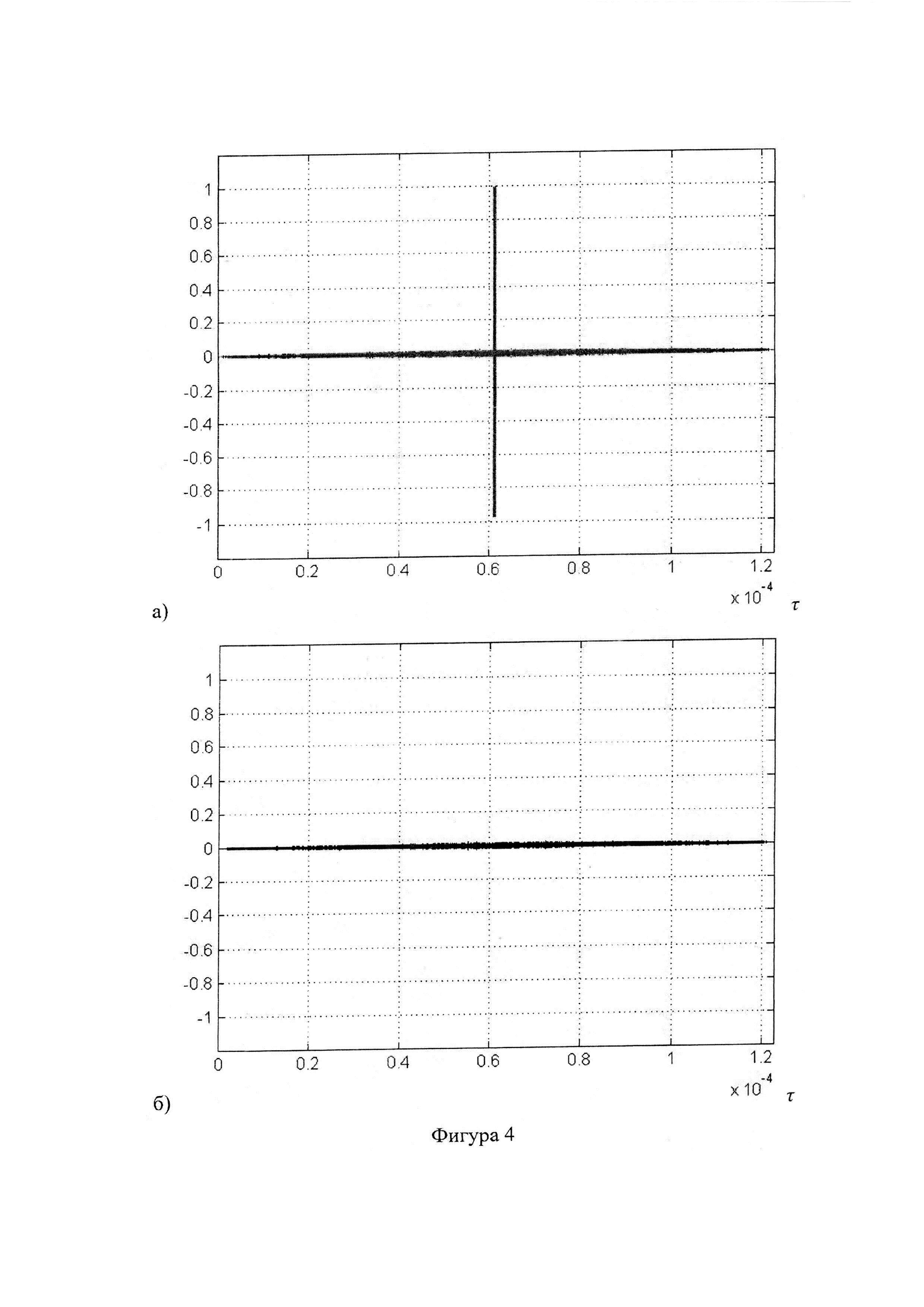
Фигура 4. Графики автокорреляционной функции сигнала 1-ого луча (а) и взаимно-корреляционной функции сигналов 1-ого и 2-ого лучей (б).
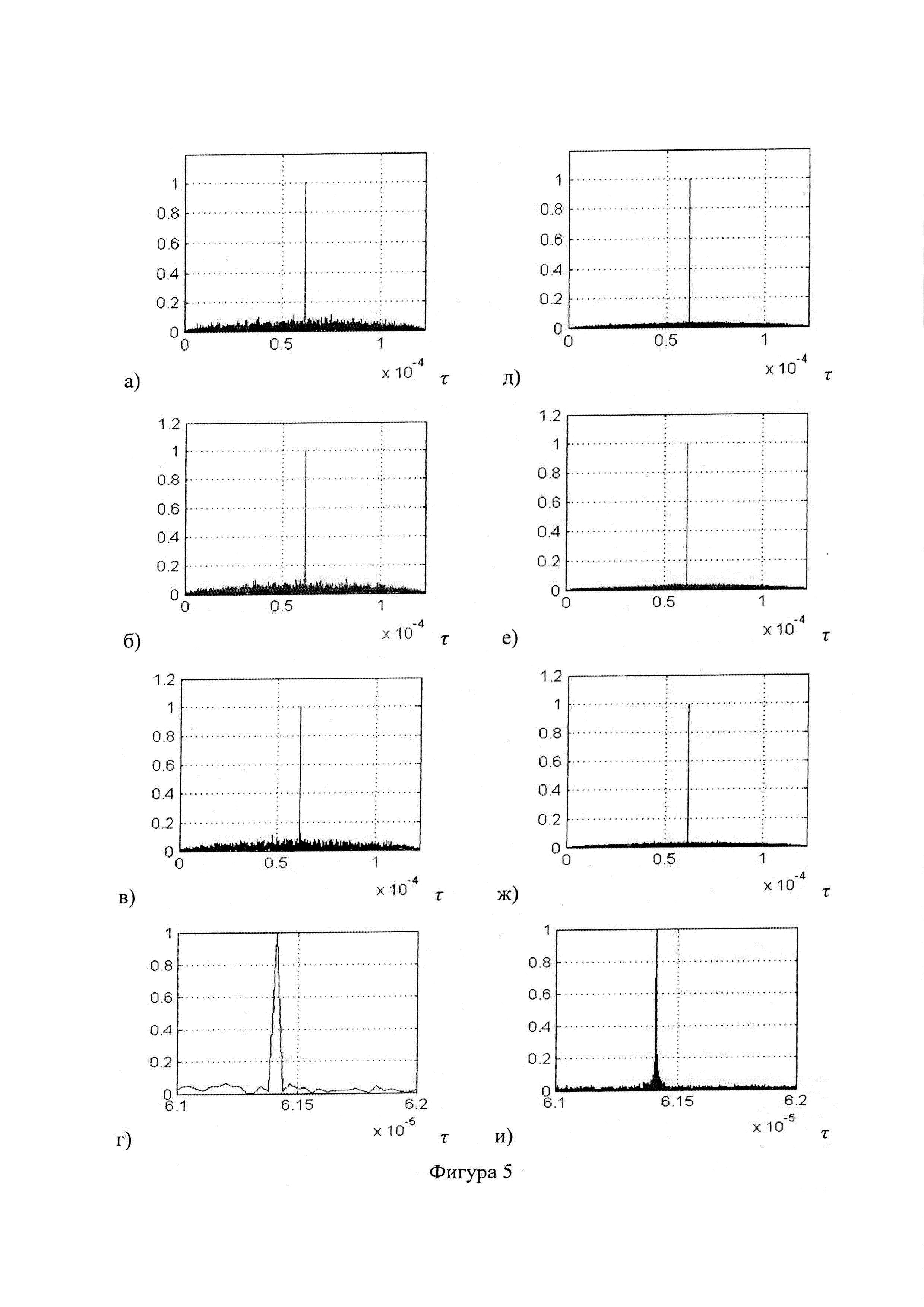
Фигура 5. Графики модулей корреляционных функций суммарного сигнала 3-х лучей после выделения его огибающей и опорных последовательностей МП1 (а), МП2 (б), МП3 (в) и модуля корреляционной функции для луча модулированного последовательностью МП1 в окрестностях корреляционного максимума (г). Графики модулей корреляционных функций принимаемого суммарного сигнала 3-х лучей и опорных шумовых сигналов 3-х лучей (д-ж) и модуля корреляционной функции 1-ого луча в окрестностях корреляционного максимума (и).
Пример реализации способа автономной навигации маловысотных ЛА, включающий определение наклонных дальностей ЛА до земной поверхности по 3-м лучам с использованием независимых широкополосных шумовых сигналов с нормальным распределением плотности вероятности, поясняют рисунки, приведенные на фиг. 3, фиг. 4 и фиг. 5д - фиг. 5и.
Лучи радиоволн излучают, как показано на фиг. 16, следующим образом. Луч 1 направлен вертикально вниз, перпендикулярно плоскости исследуемой поверхности (фиг. 1б, поз. 1), луч 2 располагается слева от луча 1 по направлению движения ЛА (фиг. 1б, поз. 2), а луч 3 - справа (фиг. 1б, поз. 3), причем все лучи располагают в одной вертикальной плоскости. Луч 4, по которому осуществляется прием отраженных сигналов, также лежит в плоскости лучей 1-3 и имеет площадь на подстилающей поверхности, перекрывающую засветки этих трех лучей (фиг. 1б, поз. 4).
Во всех лучах радиоволны излучают одновременно в одной полосе частот в виде статистически независимых широкополосных шумовых сигналов (фиг. 3). Корреляционные функции используемых шумовых сигналов лучей с нормальным распределением плотности вероятности показаны на фиг. 4. Как видно на графиках фиг. 4, автокорреляционные функции шумовых сигналов имеют единственный максимум (фиг. 4а), их взаимно-корреляционные функции (фиг. 4б) не имеют корреляционных максимумов. Таким образом, из суммарного отраженного сигнала сигналы лучей могут быть разделены и идентифицированы корреляционным способом с использованием части излучаемых по каждому лучу шумовых сигналов в качестве опорных функций, как показано на фиг. 5д - фиг. 5и. Наклонные дальности летательного аппарата до земной поверхности определяются исходя из положения пиков корреляционных функций относительно оси задержек опорных сигналов (г) на выходах каждого из каналов, соответствующих 3-м лучам.
Анализ графиков фиг. 5 показывает, что использование сигналов лучей РРС в виде статистически независимого широкополосного шума позволяет получить на выходе корреляторов корреляционные функции с меньшими уровнями боковых лепестков, что позволяет повысить точность определения наклонных дальностей ЛА. Более узкие пики данных корреляционных функций дают возможность повышения разрешающей способности по дальности РРС.
Одновременное излучение в каждом луче радиоволн в виде широкополосного нормального шума и их прием по одному широкому лучу позволяют, по сравнению с прототипом:
- повысить скрытность работы навигационной системы за счет использования шумовых сигналов, обладающих малой спектральной плотностью излучаемой мощности и имеющих случайный характер, за счет чего оказываются практически скрыты в естественных шумах;
- обеспечить лучшую помехоустойчивость, особенно к узкополосным помехам;
- обеспечить лучшую разрешающую способность по дальности РРС за счет расширения полосы частот в спектре излучаемых сигналов;
- обеспечить повышенную точность определения местоположения ЛА за счет лучших корреляционных свойств используемых сигналов, позволяющих получись взаимно-корреляционные функции принимаемого суммарного сигнала 3-х лучей и опорных шумовых сигналов 3-х лучей с минимальными боковыми лепестками.
Таким образом, способ автономной навигации маловысотных летательных аппаратов обладает рядом существенных преимуществ перед прототипом и аналогом.
Литература
1. Ржевкин, В.А. Автономная навигация по картам местности / В.А. Ржевкин // Зарубежная радиоэлектроника. - 1981. - №10. - С. 3-28.
2. Патент 2284544 РФ, МПК G01S 5/02 (2006.01) G01C 21/20 (2006.01). Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю. В., Рындык А.Г., Плужников А.Д., Потапов Н.Н., Егоров С.Н.; заявители и патентообладатели Госкорпорация «Росатом», ФГУП «ФНПЦ НИИ-ИС им. Ю.Е. Седакова». - №2005116497/09; заявлено 30.05.05; опубликовано 27.09.06, Бюл. №27.
3. Патент 2598000 РФ, МПК G01S 13/91 (2006.01). Способ автономной навигации летательных аппаратов / Кашин А.В., Хрусталев А.А., Кунилов А.Л., Ивойлова М.М.; заявители и патентообладатели Госкорпорация «Росатом», ФГУП «ФНПЦ НИИИС им. Ю.Е. Седакова». - 2015154920/07; заявлено 21.12.15; опубликовано 20.09.16, Бюл. №26.
Ударный пневмоцилиндр
Канал технологический совмещенный для промышленной ядерной установки
Способ определения угловой скорости вращения объекта, стабилизированного вращением
Многоканальный рельсовый разрядник
Устройство крепления концентричных кольцевых тепловыделяющих элементов в тепловыделяющей сборке
Оптическая усилительная головка с контротражателем диодной накачки
Квантрон твердотельного лазера с термостабилизацией диодной накачки
Способ регистрации локальных колебаний давления при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения
Бронезащита
Датчик углового положения
Способ навигации летательных аппаратов
Способ навигации летательных аппаратов и устройство для его осуществления
Способ радиолокации с изменением несущей частоты от импульса к импульсу
Приемопередатчик бортового ретранслятора
Способ формирования фазоманипулированного сигнала системы телеметрии и устройство для его осуществления
Система встроенного контроля бортового ретранслятора

