Результат интеллектуальной деятельности: СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение.
Данное изобретение относится к способам позиционирования подводных объектов, а именно к способам, при которых принимают посредством расположенных на гидроакустических буях приемников сигналы со спутников, определяют координаты гидроакустических буев, синхронизируют часы всех гидроакустических буев, передают данные о местоположении указанных гидроакустических буев, принимают сигналы с помощью расположенного на подводном объекте приемника гидроакустических сигналов, определяют координаты подводного объекта с помощью вычислительного модуля. Данное решение может быть использовано при одновременном определении географического положения неограниченного числа подводных мобильных объектов, дистанционно управляемых подводных аппаратов, водолазов, морских животных и т.д. в процессе движения.
В данном описании использованы следующие термины:
Гидроакустический буй — свободно плавающий или установленный на якоре буй, предназначенный для излучения и/или приёма и ретрансляции по радиоканалу гидроакустических сигналов.
Уровень техники.
Существуют способы позиционирования подводных объектов, которые заключаются в определении координат подводных объектов. Для этого известны три типа систем определения координат подводных объектов в гидроакустике, отличающиеся друг от друга размерами измерительных баз, представляющие собой расстояния между гидроакустическими антеннами. Это системы УКБ (Ультра-короткобазисные, USBL, ultra-short baseline), КБ (короткобазисные, SBL, short baseline) и ДБ (длиннобазисные, LBL, long baseline). Наиболее близкими по своим характеристикам к заявленному решению являются длиннобазисные системы, однако, в данном изобретении предлагается синтез короткобазисной и длиннобазисной систем, когда опорные точки (гидроакустические буи) располагаются на значительном удалении друг от друга, образуя длинную навигационную базу, но определение местоположения позиционируемого объекта производится разностно-дальномерным способом, как преимущественно в короткобазисных системах.
Достоинствами такого способа являются, во-первых, возможность одновременного позиционирования неограниченного числа объектов, а во-вторых, возможность реализовать на позиционируемом объекте полностью пассивный режим, когда для определения собственного местоположения ему достаточно только принимать сигналы гидроакустических буев, декодировать координаты гидроакустических буев и сигналов и по разностям времен прихода сигналов определять собственное географическое положение.
Из уровня техники известен способ позиционирования подводных объектов, при котором принимают посредством расположенных на гидроакустических буях приемников сигналы со спутников, определяют координаты гидроакустических буев посредством вычислительных модулей гидроакустических буев, синхронизируют часы всех гидроакустических буев по спутниковой навигационной системе, передают данные о местоположении указанных гидроакустических буев и их идентификационные данные в виде гидроакустических сигналов, излучаемых передатчиками гидроакустических буев, принимают сигналы с помощью расположенного на подводном объекте приемника гидроакустических сигналов, определяют координаты подводного объекта с помощью вычислительного модуля подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно.
См патент на изобретение № 2599902, опубликован в 2016 году.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения.
Недостатком этого прототипа является его невысокая точность навигации, то есть определения координат подводных объектов. Это связано с тем, что:
- происходит потеря точности при работе вне базы (фигуры гидроакустических буев),
- невозможно покрыть гидроакустическими буями любую акваторию, с обеспечением работы внутри базы всегда, с сохранением высокой точности позиционирования на всем полигоне работ.
- дополнительно нет возможности передать команды телеуправления на подводный объект.
- требуется точная настройка базовых линий, поскольку координаты буев фиксируются приемником глобальной спутниковой навигационной системы и соответственно уменьшается погрешность определения координат из-за неточной установки гидроакустических буев.
Раскрытие изобретения.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ позиционирования подводных объектов, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить повышение точности позиционирования подводных объектов.
Для достижения этой цели способ навигации подводных объектов характеризуется по существу тем, что дополнительно способ включает в себя следующие этапы:
используют по меньшей мере три гидроакустических буя,
при помощи первого гидроакустического буя передают первый запросный гидроакустический сигнал маяку-ответчику подводного объекта, находящегося под поверхностью воды,
фиксируют момент начала передачи первого запросного гидроакустического сигнала с привязкой ко времени, получаемого по спутниковому навигационному сигналу,
передают как минимум это зафиксированное время по радиоканалу, при помощи передатчика первого гидроакустического буя,
приемниками второго и третьего гидроакустических буев принимают это зафиксированное время,
принимают первый запросный сигнал первого гидроакустического буя маяком-ответчиком подводного объекта, находящегося под поверхностью воды,
определяют время прихода первого гидроакустического запросного сигнала по часам маяка-ответчика подводного объекта, не синхронизированным с часами буев,
формируют ответный сигнал и передают его через фиксированное время после момента прихода первого запросного сигнала,
ответный гидроакустический сигнал принимают как минимум тремя гидроакустическими буями,
первый гидроакустический буй, передавший первый запрос и принявший ответ по гидроакустическому каналу непосредственно определяет наклонную дальность по времени распространения сигнала, так как передавший первый запрос первый гидроакустический буй дублирует по радиоканалу время передачи первого сигнала и свои абсолютные географические координаты, а часы всех буев синхронизированы по спутниковой навигационной системе,
первый гидроакустический буй передает определенную дальность по радиоканалу,
на втором и третьем гидроакустических буях определяют время прихода ответного сигнала маяка-ответчика подводного объекта, принимают по радиоканалу наклонную дальность от запросившего буя до маяка-ответчика подводного объекта, определяют наклонные дальности от маяка-ответчика до каждого из второго и третьего гидроакустических буев,
по полученным как минимум трем дистанциям от опорных точек гидроакустических буев с известными координатами до искомой точки - маяка-ответчика подводного объекта - определяют координаты подводного объекта.
Благодаря данным выгодным характеристикам появляется возможность повышения точности навигации путем вычисления координат по трем дистанциям от опорных точек гидроакустических буев с известными координатами до искомой точки.
Существует возможный вариант изобретения, в котором формируют запросный сигнал, который содержит код, определяющий перечень данных, которые должны быть переданы в ответном сигнале.
Благодаря данной выгодной характеристике появляется возможность запрашивать дополнительные данные, которые должны быть переданы в ответном сигнале. Например, это может одно или несколько из: глубина ответчика, гидростатическое давление, температура окружающей среды, состояние источника питания ответчика и т.п.
Существует еще один возможный вариант изобретения, в котором формируют ответный сигнал, который включает в себя данные о глубине подводного объекта, что позволяет повысить точность определения его местоположения в трехмерном пространстве.
Благодаря данной выгодной характеристике появляется возможность повысить точность определения местоположения подводного объекта в трехмерном пространстве, так как данные о глубине непосредственно могут быть измерены с высокой точностью.
Существует также и такой вариант изобретения, в котором формируют ответный сигнал, который включает в себя данные о температуре окружающей воды подводного объекта, что позволяет более точно определить скорость звука, соответственно и наклонную дальность до ответчика.
Благодаря данной выгодной характеристике появляется возможность повысить точность определения его местоположения в трехмерном пространстве, так как данные о температуре окружающей воды позволяют точнее рассчитать скорость звука в воде, соответственно расстояние (наклонную дальность).
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области,
Краткое описание чертежей.
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
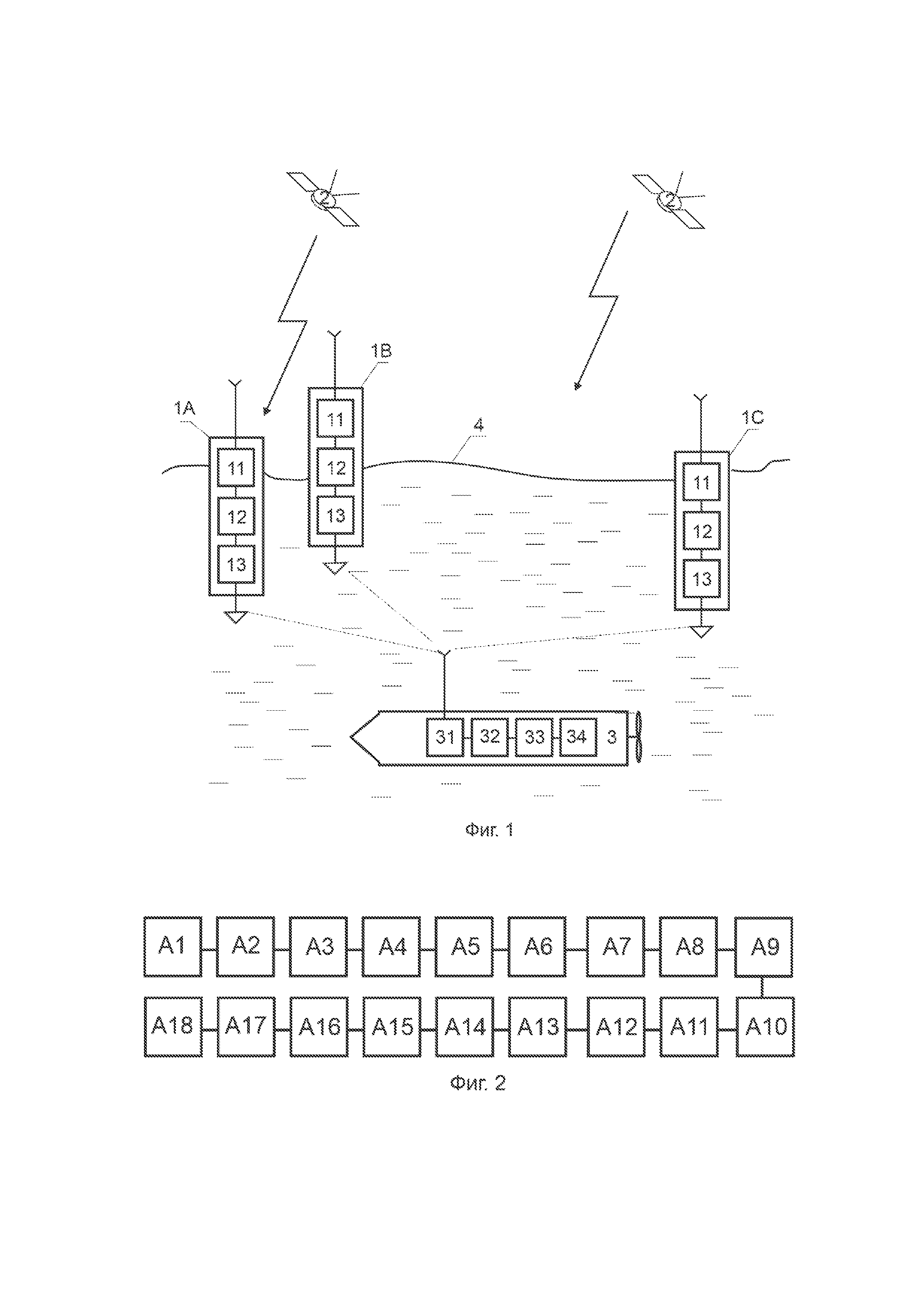
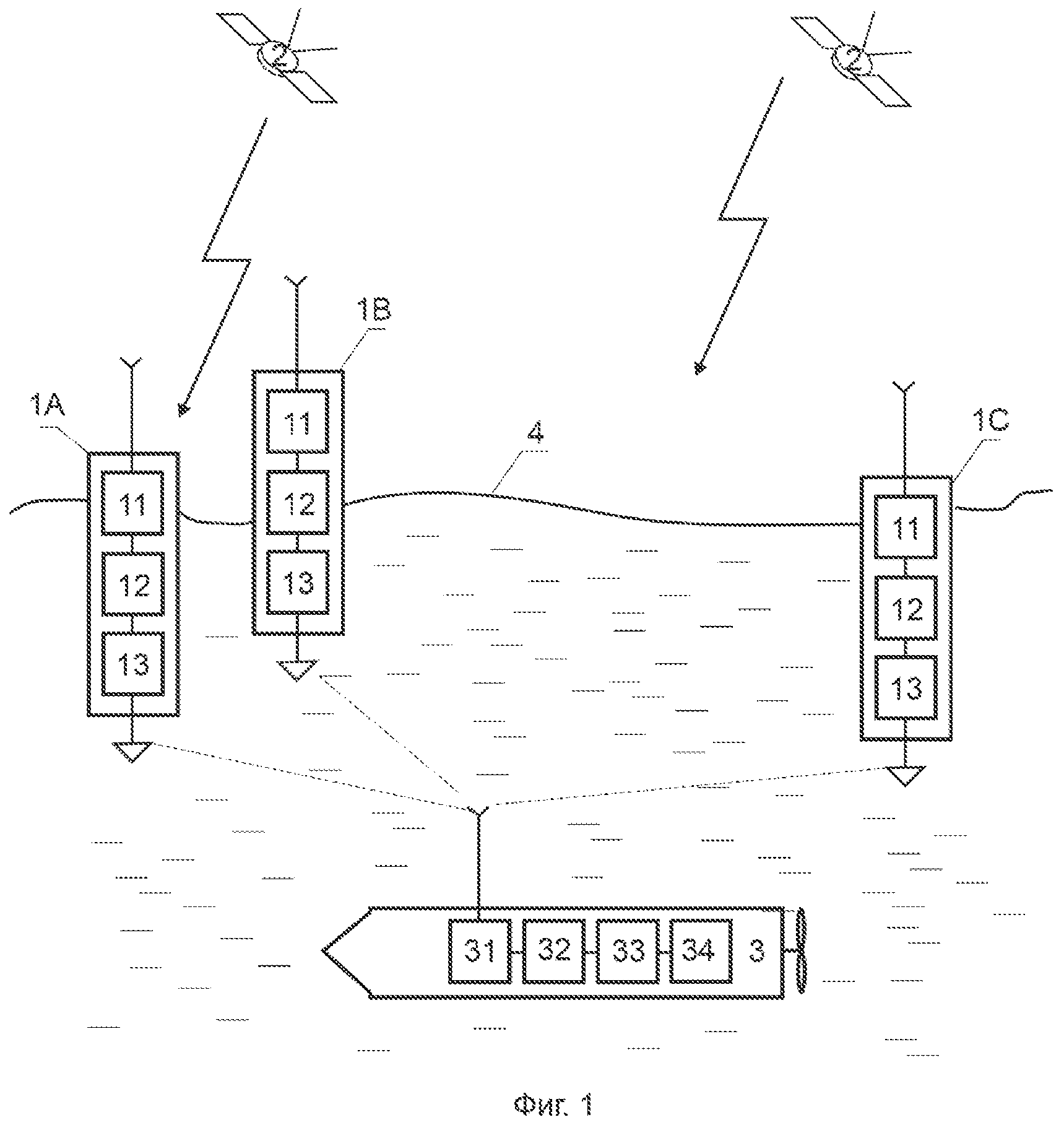
- фигура 1 изображает функциональную схему системы навигации подводных объектов, согласно изобретению,
- фигура 2 схематично изображает этапы способа навигации подводных объектов, согласно изобретению.
Согласно фигуре 1 система навигации подводных объектов включает в себя гидроакустические буи 1, обозначены как 1А, 1В, 1С, имеющие приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 гидроакустического буя, который соединен с передатчиком 13 гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев и их идентификационные данные.
Система также включает в себя расположенный на подводном объекте 3 маяк-ответчик подводного объекта 31 гидроакустических сигналов с указанных гидроакустических буев 1, соединенный с вычислительным модулем 32 подводного объекта, который соединен с датчиком глубины 33 подводного объекта и датчиком температуры 34 окружающей воды.
В системе должно быть использовано как минимум три гидроакустических буя 1.
На фигуре 1 дополнительно позицией 4 обозначена граница жидкой и атмосферной сред, пунктирами – распространение сигналов от гидроакустических буев до приемника подводного объекта.
На антеннах гидроакустических буев могут быть установлены датчики давления, а также датчики давления могут быть установлены в крышках гидроакустических буев.
Осуществление изобретения.
Способ позиционирования подводных объектов работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения. Имея в виду, что данный пример не ограничивает применения изобретения.
Согласно фигуре 2:
Этап А1. Предварительно на поверхности воды устанавливают по меньшей мере три гидроакустических навигационных буя 1А, 1В, 1С, имеющие каждый приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 гидроакустического буя, который соединен с передатчиком 13 гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев 1 и их идентификационные данные.
Этап А2. Принимают посредством расположенных на гидроакустических буях 1 приемников 11 сигналы со спутников 2.
Этап А3. Определяют координаты гидроакустических буев 1А, 1В, 1С посредством вычислительных модулей 12 гидроакустических буев,
Этап А4. Синхронизируют часы всех гидроакустических буев 1А, 1В, 1С по спутниковой навигационной системе.
Этап А5. Передают при помощи первого гидроакустического буя 1А передают первый запросный гидроакустический сигнал маяку-ответчику 31 подводного объекта, находящегося под поверхностью воды.
Этап А6. Фиксируют момент начала передачи первого запросного гидроакустического сигнала с привязкой ко времени, получаемого по спутниковому навигационному сигналу.
Этап А7. Передают как минимум это зафиксированное время по радиоканалу, при помощи передатчика первого гидроакустического буя 1А.
Этап А8. Приемниками второго 1В и третьего 1С гидроакустических буев принимают это зафиксированное время.
Этап А9. Принимают первый запросный сигнал первого гидроакустического буя 1А маяком-ответчиком 31 подводного объекта, находящегося под поверхностью воды.
Этап А10. Определяют время прихода первого гидроакустического запросного сигнала по часам маяка-ответчика 31 подводного объекта, не синхронизированным с часами буев.
Этап А11. Формируют ответный сигнал и передают его через фиксированное время после момента прихода первого запросного сигнала.
Этап А12. Ответный гидроакустический сигнал принимают как минимум тремя гидроакустическими буями1А, 1В, 1С.
Этап А13. Первый гидроакустический буй 1А, передавший первый запрос и принявший ответ по гидроакустическому каналу непосредственно определяет наклонную дальность по времени распространения сигнала, так как передавший первый запрос первый гидроакустический буй дублирует по радиоканалу время передачи первого сигнала и свои абсолютные географические координаты, а часы всех буев синхронизированы по спутниковой навигационной системе.
Этап А14. Первый гидроакустический буй 1А передает определенную дальность по радиоканалу.
Этап А15. На втором и третьем гидроакустических буях 1В и 1С определяют время прихода ответного сигнала маяка-ответчика 31 подводного объекта, принимают по радиоканалу наклонную дальность от запросившего буя до маяка-ответчика подводного объекта, определяют наклонные дальности от маяка-ответчика до каждого из второго и третьего гидроакустических буев 1В и 1С.
Этап А16. По полученным как минимум трем дистанциям от опорных точек гидроакустических буев 1А, 1В и 1С с известными координатами до искомой точки - маяка-ответчика 31 подводного объекта - определяют координаты подводного объекта.
Этап А17. Опционально формируют ответный сигнал, который включает в себя данные о глубине подводного объекта, что позволяет повысить точность определения его местоположения в трехмерном пространстве
Этап А18. Опционально формируют ответный сигнал, который включает в себя данные о температуре окружающей воды подводного объекта, что позволяет более точно определить скорость звука, соответственно и наклонную дальность до ответчика.
Последовательность этапов является примерной и позволяет переставлять, убавлять, добавлять или производить некоторые операции одновременно без потери возможности обеспечивать навигацию подводных объектов.
Промышленная применимость.
Предлагаемый способ позиционирования подводных объектов может быть осуществлены специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением изготовлен опытный образец системы позиционирования подводных объектов. Он состоял из трех гидроакустических буев и трех маяков-ответчиков, были проведены испытания при следующих параметрах системы:
- гидроакустические буи располагались в квадрате 1500х1500 метров,
- каждый приемник был выполнен в виде отдельного автономного устройства,
- приемники были жестко зафиксированы на разных удалениях от буев (внутри квадрата) и на разных глубинах: 5, 8 и 17 метров. Длительность проведения эксперимента составила 2.5 часа,
- частота обновления навигационных данных составила 0.25 Гц (1 раз в 4 секунды) для каждого маяка-ответчика;
Место проведения испытаний: устье реки «Пичуга», Волгоградская область. Максимальная глубина водоема: 25 метров, песчано-илистое дно.
Испытания опытного образца системы позиционирования подводных объектов показали, что она обеспечивает возможность:
- точного определения координат подводного объекта, а именно долготы и широты по полученным сигналам, в частности среднеквадратичное отклонение географической позиции в метрах составило 0.30 метров по результатам для трех маяков-ответчиков, работающих непрерывно в течение 2.5 часов.
- не требуется точной настройки базовых линий, поскольку координаты буев фиксируются приемником глобальной спутниковой навигационной системы и соответственно уменьшается погрешность определения координат из-за неточной установки гидроакустических буев;
- поскольку от ответчика требуется передать как минимум свою глубину, значительно сокращается объем передаваемых по гидроакустическому каналу данных.
Все это позволяет значительно повысить точность навигации подводных объектов.
Дополнительным полезным техническим результатом заявленного изобретения является то, что оно позволяет повышает точность в случае если в данной системе на антеннах буев установлены датчики давления, а также датчики давления есть в крышках буев. Это происходит благодаря тому, что, во-первых, постоянно учитывается изменение атмосферного давления и точнее определяется глубина, а во-вторых, если в той системе глубина антенн буев бралась исходя из длин кабелей, то здесь она непосредственно измеряется, что также повышает точность (антенну может немного наклонять течением и она всплывает).
Данные о глубине маяка-ответчика позволяют обеспечить точное решение и решать плоскую задачу, так как глубины погружения гидроакустических антенн буев известны и можно из наклонной дальности между каждым буем и маяком-ответчиком определить проекцию этой дальности на поверхность воды.
Таким образом, в данном изобретении достигнута поставленная задача – повышение точности навигации подводных объектов, а также обеспечение навигации во время информационного обмена при работе с большим числом адресованных подводных объектов, в частности, при обеспечении функционирования так называемых подводных беспроводных сетей сенсоров.
Способ навигации подводных объектов и система для его осуществления
Способ позиционирования подводных объектов
Способ и система беспроводной передачи энергии и информации
Способ борьбы с гармонической помехой при автокорреляционном методе приема информации с использованием шумоподобных сигналов
Способ передачи дискретной информации по гидроакустическому каналу связи в условиях многолучевого распространения сигнала
Способ навигации подводных объектов и система для его осуществления
Гидроакустическое устройство
Способ и система навигации подводных объектов
Способ позиционирования подводных объектов
Способ и система беспроводной передачи энергии и информации

