Результат интеллектуальной деятельности: Манипулятор, работающий в герметизированном объёме
Вид РИД
Изобретение
Предлагаемое изобретение относится к машиностроению, в частности к манипуляторам, работающим в герметизированном объеме, и может быть использовано в технологических процессах изготовления электронных приборов, для обработки радиоактивных, токсичных, взрывчатых веществ.
Известен манипулятор для перемещения различных предметов, состоящий из неподвижного основания, складывающегося механизма, выполняющего роль стойки, и механической руки с захватом, в котором вертикальное перемещение осуществляется путем перемещения одного из шарниров в горизонтальном направлении по неподвижному основанию с помощью силового цилиндра /1/.
Недостатком известного решения является низкая жесткость складывающегося механизма.
Наиболее близким к предлагаемому техническим решением является манипулятор, содержащий поворотное основание, на котором установлен складывающийся механизм типа пантографа, содержащий ряд пар, шарнирно соединенных между собой звеньев, платформу, несущую механическую руку с захватом, и закрепленную на верхних звеньях складывающегося механизма и привод подъема в виде винтовой передачи с гайками, которые соединяют нижние звенья складывающегося механизма /2/.
Прототипу присущи следующие недостатки. Во-первых, низкая жесткость складывающегося механизма в плоскости, проходящей через оси центральных шарниров. Из-за низкой жесткости при осуществлении технологических процессов возможны изгибы складывающегося механизма, что снижает точность позиционирования захвата механической руки и вместе с ним обрабатываемого объекта. Во-вторых, при работе прототипа выделяется значительное количество продуктов износа из-за большого количества пар трения. Низкая точность позиционирования затрудняет соблюдение заданных режимов обработки. А выделяющиеся при работе пар трения продукты загрязняют обрабатываемые образцы. Таким образом, эти технические недостатки прототипа являются причиной снижения качества выпускаемой продукции.
Целью изобретения является повышение качества выпускаемой продукции за счет обеспечения точного позиционирования обрабатываемых образцов за счет снижения содержания продуктов износа в зоне обработки.
Поставленная цель достигается тем, что в манипуляторе работающем в герметизированном объеме, содержащем поворотное основание, на котором установлен складывающийся механизм, образованный парами шарнирно соединенных между собой звеньев, платформу, закрепленную на верхних звеньях складывающегося механизма и привод подъема, согласно изобретению звенья складывающегося механизма выполнены в форме замкнутых контуров, причем в каждой паре одно звено пропущено через другое, а связи звеньев смежных пар и крайних звеньев с платформой и поворотным основанием выполнены в виде жестко закрепленных на соединяемых элементах и установленных крест-накрест пружин.
Отличительные признаки являются существенными, т.к. каждый из них необходим, а все вместе с ограничительными достаточны для достижения поставленной цели. Действительно выполнение звеньев в форме замкнутых контуров повышает жесткость складывающегося механизма, благодаря, что по сравнению с прототипом увеличиваются сечения каждого звена в плоскости, проходящей через оси шарниров. Повышение жесткости складывающегося механизма исключает его изгибы, т.е. обеспечивает точность позиционирования платформы на которой размещены образцы, и в рабочей зоне, что способствует четкому соблюдению заданных технологических режимов. Кроме того жесткость складывающегося механизма повышает его надежность и долговечность. Установка одного из звеньев каждой пары внутри контура другого звена этой же пары необходимо для обеспечения работоспособности складывающегося механизма при выполнении звеньев в форме замкнутых контуров. Выполнение связей между звеньями смежных пар, а также связей крайних звеньев с платформой и поворотным основанием в виде пружин сокращает количество пар трения. Благодаря чему уменьшается выделение продуктов износа. Связи в виде установленных крест-накрест пружин создают в складывающемся механизме усилие, направленное вверх, и разгружающее шарниры этого механизма. Снижение усилий, действующих на пары трения, благоприятствует сокращению выделения продуктов износа.
Заявляемое решение отвечает критерию «существенные отличия», т.к. отличительные от прототипа признаки в исследованных аналогах не обнаружены.
Сущность заявляемого манипулятора пояснена чертежами.
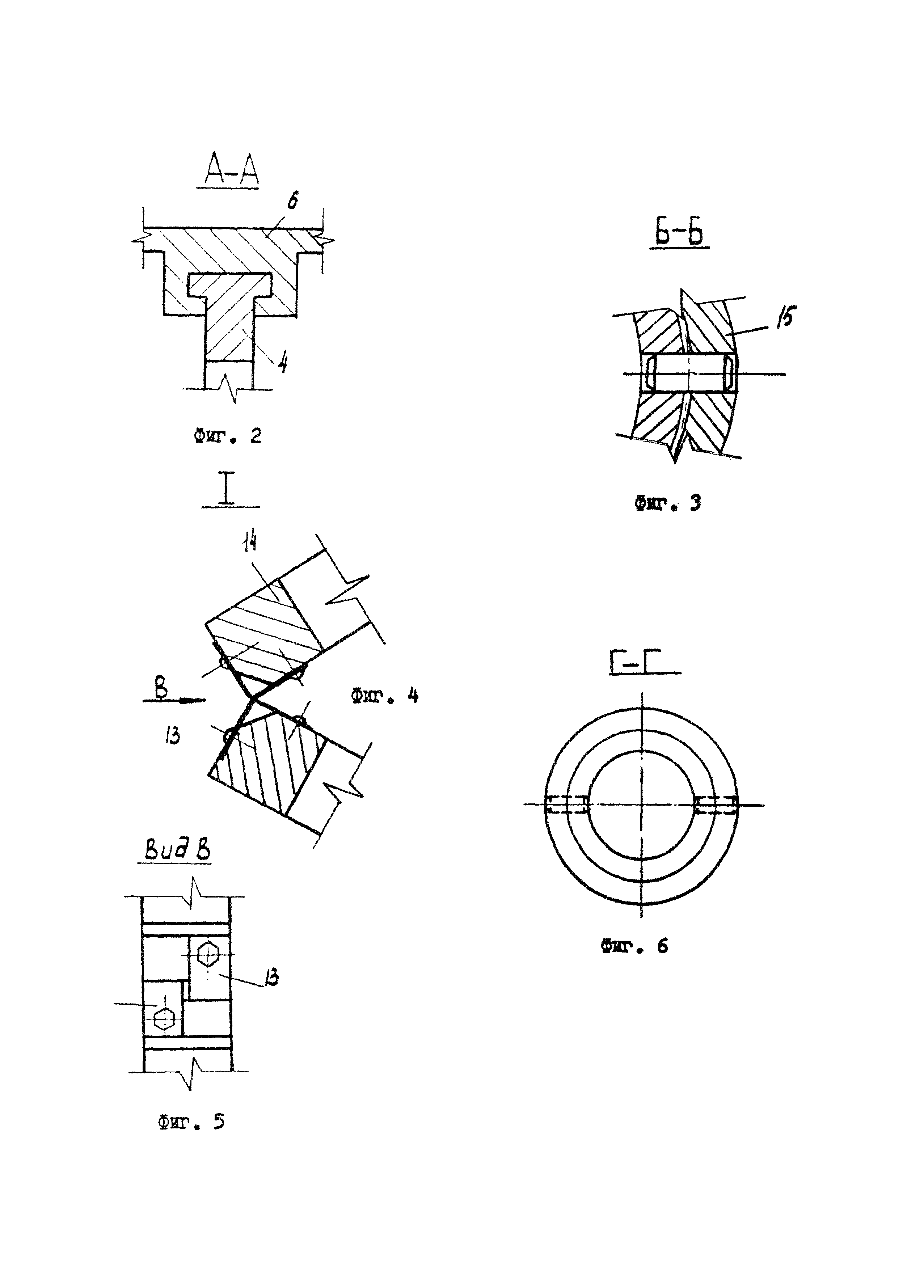
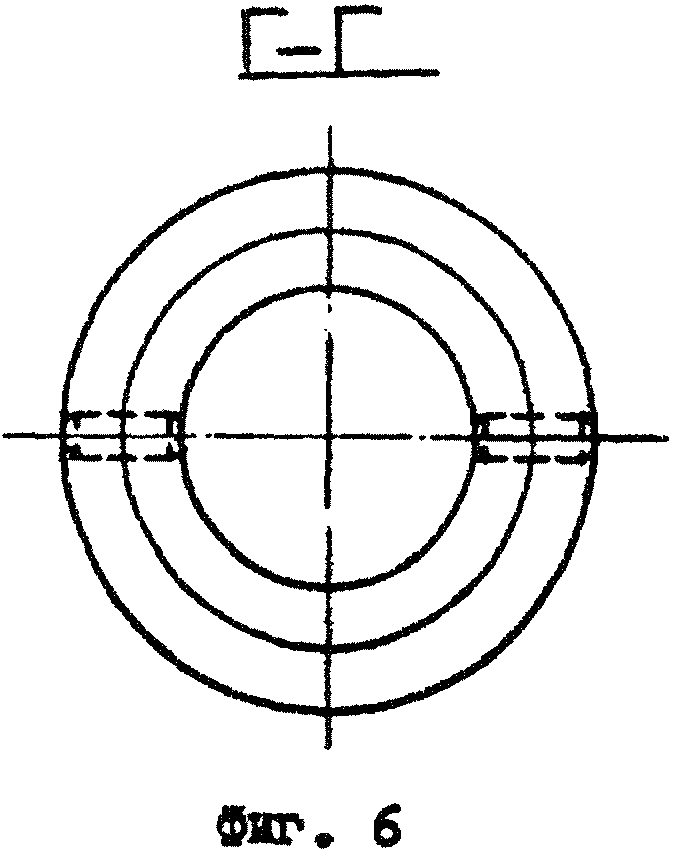
Где на фиг. 1 изображен общий вид манипулятора, на фиг. 2 - разрез А-А поворотного основания, на фиг. 3 - разрез Б-Б фиг. 1, на фиг. 4 - связь между звеньями смежных пар, на фиг. 5 - вид В фиг. 4, на фиг. 6 - разрез Г-Г фиг. 1.
Манипулятор имеет корпус 1, жестко закрепленный на поворотном основании 2, к которому винтами 3 привинчена Т-образная направляющая 4. Один конец направляющей выполнен с крепежным выступом 5, а на ее Т-образной части установлен подвижный крепежный элемент 6. Подвижный крепежный элемент 6 выполнен с резьбовым отверстием взаимодействующих с винтом 7, который жестко связан с маховиком 8 рукоятки управления. Кроме маховика 8 в состав рукоятки управления входят корпус 9, лимб 10, сильфон 11, прижимное кольцо 12. К крепежному выступу 5 и подвижному крепежному элементу 6 посредством установленных крест-накрест пружин 13 прикреплены звенья 14 нижней пары складывающегося механизма, состоящего из нескольких таких пар звеньев 14. Звенья 14 выполнены в форме замкнутых контуров, например колец. При этом одно из звеньев образующих пару, пропущено внутри второго звена этой же пары. Звенья 14, образующие одну пару соединены между собой диаметрально расположенными шарнирами 15. Звенья 14 смежных пар связаны между собой установленными крест-накрест пружинами 13. Такими же пружинами 13 одно верхнее звено 14 соединено с крепежным выступом 16 платформы 17, а другое верхнее звено соединено с подвижным крепежным элементом 18, установленным на Т-образной направляющей 19 платформы 17.
Манипулятор работает следующим образом.
Вращения платформы 17, на которой размещены обрабатываемые образцы, вокруг оси манипулятора осуществляют посредством поворота подвижного основания вручную или от привода (на чертеже не показан). Перемещение платформы 17 с образцами в вертикальном направлении осуществляют вращение маховика 8. При повороте маховика 8 вместе с ним вращается винт 7 его резьба, взаимодействуя с резьбой отверстия подвижного крепежного элемента 6, перемещает последний по Т-образной направляющей 4 поворотного основания. Если маховик 8 вращают в таком направлении, при котором подвижный крепежный элемент сближается с крепежным выступом 5, то нижние звенья 14 складывающегося механизма сводятся друг к другу. Поскольку все пары звеньев связаны между собой пружинами 13, то при сведении нижних звеньев все остальные звенья тоже сводятся к вертикальной плоскости, проходящей через оси шарниров 15. В результате длина складывающегося механизма увеличивается и платформа 17 поднимается. При подъеме платформы верхние звенья 14, закрепленные на крепежном выступе 16 и подвижном крепежном элементе 18, сводят эти детали. Поскольку при разведенных звеньях в 14 пружины 13, находятся в деформированном состоянии, то усилии упругой деформации этих пружин стремятся свести звенья 14 к вертикальной плоскости. Такое направление усилий упругой деформации пружин 13 разгружает шарниры 15 и снижает усилия прилагаемые к маховику 8 при подъеме платформы 17. При вращении маховика 8 в обратном направлении происходит опускание платформа 17.
Благодаря тому, что заявляемое решение имеет большую по сравнению с прототипом площадь сечения в горизонтальной плоскости жесткость складывающегося механизма в нем будет больше жесткости прототипа. Повышение жесткости обеспечивает точность позиционирования образцов и, как следствие гарантирует соблюдение заданных технологических режимов, т.е. способствует повышению качества выпускаемой продукции.
Заявляемая конструкция манипулятора почти в пять раз сокращает количество пар трения и практически разгружает шарнирные соединения. Эти факторы обуславливают снижение содержания продуктов износа в рабочей зоне, уменьшает вероятность загрязнения обрабатываемых образцов.
Манипулятор, предназначенный для работы в герметизированном объеме, содержащий поворотное основание, на котором установлен складывающийся механизм, образованный парами шарнирно соединенных между собой звеньев, платформу, закрепленную на верхних звеньях складывающегося механизма, и привод подъема, отличающийся тем, что звенья складывающегося механизма выполнены в форме замкнутых контуров, причем в каждой паре одно звено выполнено с возможностью пересечения другого, а связи звеньев смежных пар и крайних звеньев с платформой и поворотным основанием выполнены в виде жестко закрепленных на соединяемых элементах и установленных крест-накрест пружин.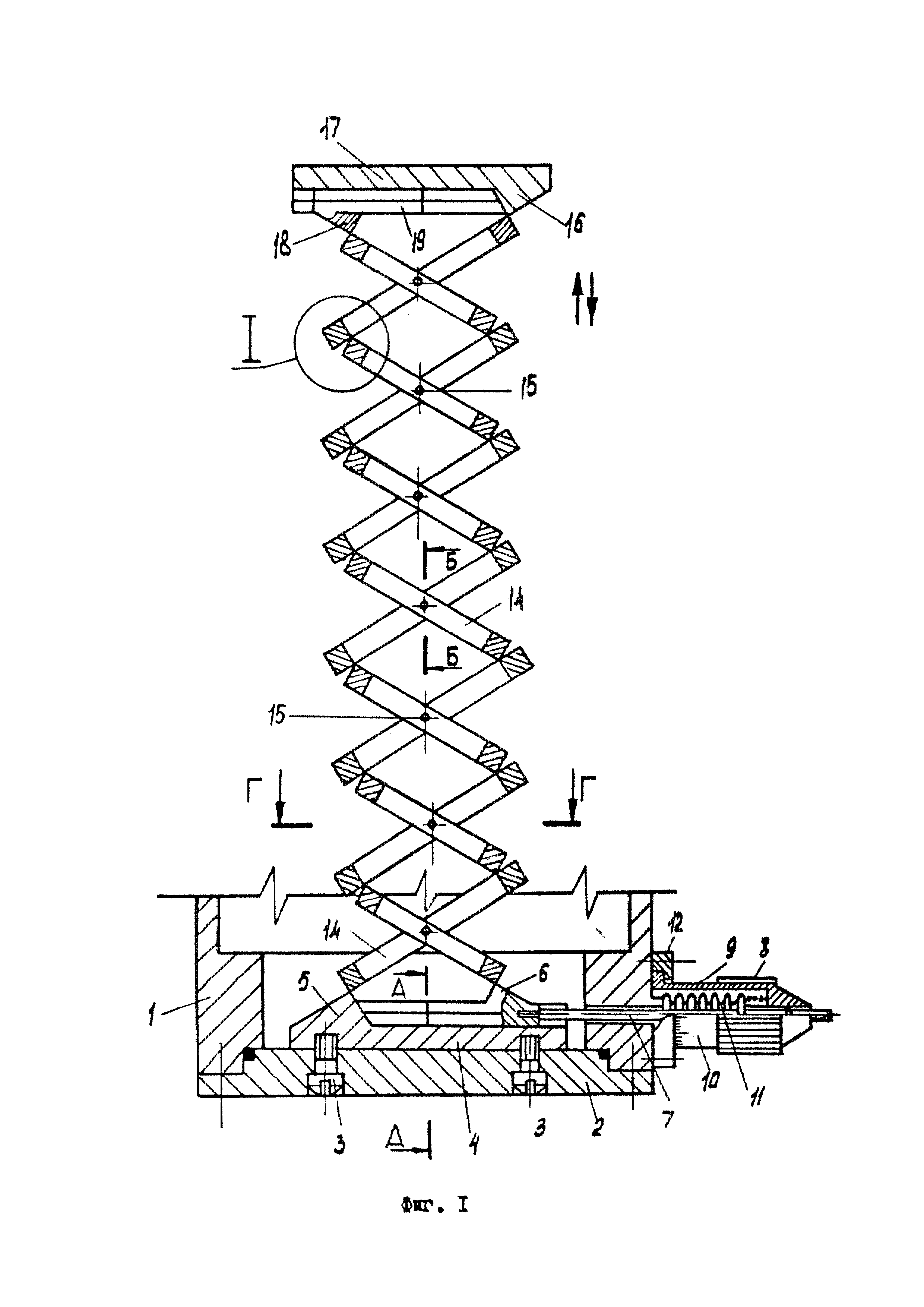
Манипулятор, работающий в герметизированном объеме
Опора шпагового манипулятора
Захват манипулятора
Манипулятор, работающий в герметизированном объеме
Манипулятор, работающий в герметизированном объеме
Манипулятор
Снаряд для поражения летательных аппаратов
Снаряд для поражения летательных аппаратов
Манипулятор
Экстрактор для извлечения камней из мочеточника
Опора шпагового манипулятора
Захват манипулятора
Манипулятор, работающий в герметизированном объеме
Манипулятор, работающий в герметизированном объеме
Манипулятор
Снаряд для поражения летательных аппаратов
Снаряд для поражения летательных аппаратов
Манипулятор
Экстрактор для извлечения камней из мочеточника
Манипулятор с вакуумной камерой

