Результат интеллектуальной деятельности: СИГНАЛЬНЫЙ БЕСПИЛОТНЫЙ АППАРАТ ДЛЯ АВТОМОБИЛЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к дорожным системам аварийной сигнализации.
Уровень техники
Некоторые транспортные средства могут быть оснащены аварийными дорожными наборами. Эти наборы могут включать в себя неподвижные знаки, которые предупреждают других водителей на дороге во время аварийной ситуации. Например, транспортное средство может использовать знак аварийной остановки, расположенный на земле рядом с транспортным средством, для того чтобы предупреждать других водителей, что транспортное средство остановлено. Неподвижный знак аварийной остановки должен располагаться на дороге водителем. Водитель может не быть хорошо осведомленным о порядке действий в аварийной ситуации на дороге, таком как расстояние для размещения знака аварийной остановки на дороге, так чтобы другие водители были способны замечать знак аварийной остановки. Отсутствие заметности может делать неподвижный знак аварийной остановки неэффективным для предупреждения других транспортных средств, совместно использующих дорогу с разбитым транспортным средством.
Сущность изобретения
Транспортное средство включает в себя кузов, который образует полость, и беспилотную систему, расположенную в пределах полости, которая включает в себя предупредительный знак. Транспортное средство также включает в себя контроллер, выполненный с возможностью, в ответ на запрос пользователя во время остановки, запускать беспилотную систему из полости и задавать положение беспилотного аппарата относительно транспортного средства на основании транспортного потока вокруг транспортного средства, чтобы предупреждать другие транспортные средства поблизости от транспортного средства с помощью предупредительного знака касательно возникновения остановки.
Система аварийного оповещения для транспортного средства включает в себя беспилотную систему, в том числе, предупредительный знак, расположенный в кузове, определяющем полость транспортного средства, и контроллер. Контроллер выполнен с возможностью, в ответ на пользовательский запрос во время остановки, запускать беспилотную систему из полости и задавать положение беспилотного аппарата относительно транспортного средства на основании транспортного потока вокруг транспортного средства, чтобы предупреждать другие транспортные средства поблизости от транспортного средства с помощью предупредительного знака касательно возникновения остановки.
Беспилотная система для транспортного средства включает в себя беспилотный аппарат, расположенный в пределах отделения для хранения транспортного средства и имеющий предупредительный знак, скрепленный с беспилотным аппаратом, и контроллер беспилотного аппарата. Контроллер беспилотного аппарата прикреплен к беспилотному аппарату и выполнен с возможностью, в ответ на запрос пользователя во время остановки транспортного средства, запускать беспилотный аппарат из отделения для хранения и задавать положение беспилотного аппарата относительно транспортного средства на основании транспортного потока вокруг транспортного средства, чтобы предупреждать другие транспортные средства поблизости от транспортного средства с помощью предупредительного знака касательно возникновения остановки транспортного средства.
Краткое описание чертежей
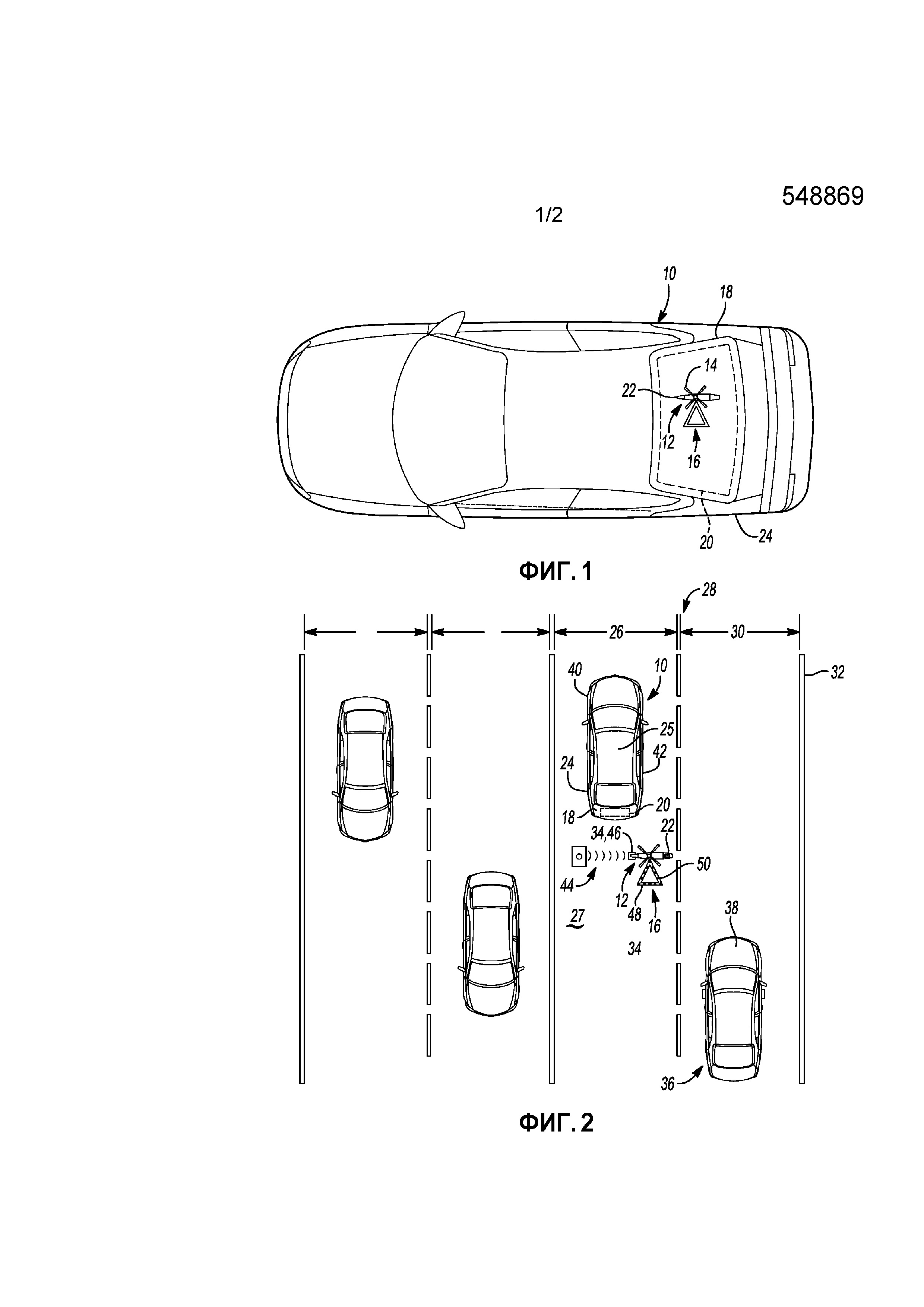
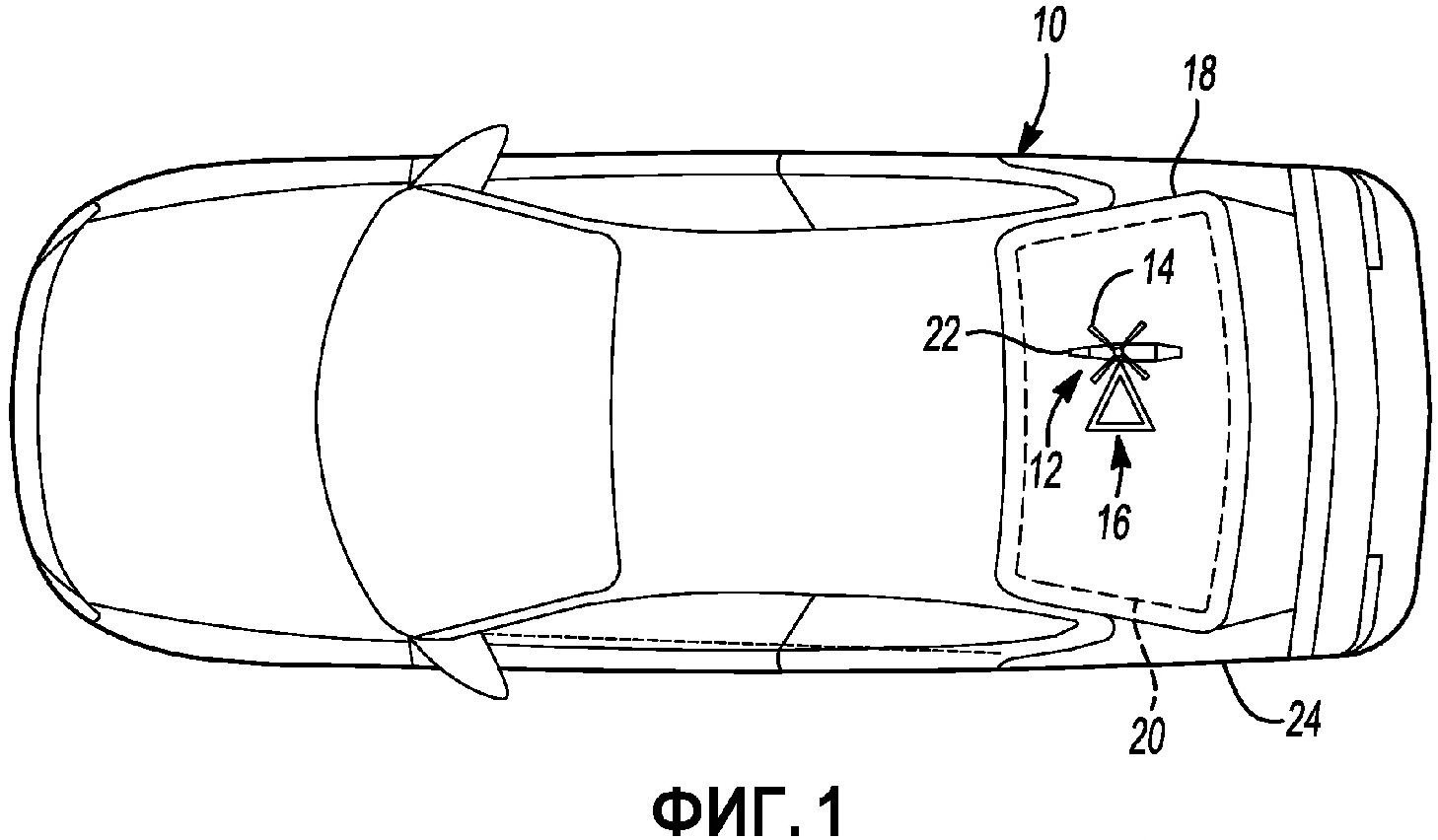
Фиг. 1 - вид сверху транспортного средства, имеющего предупредительный беспилотный аппарат аварийного оповещения;
фиг. 2 - вид сверху транспортного средства на обочине дороги с развернутым предупредительным беспилотным аппаратом аварийного оповещения; и
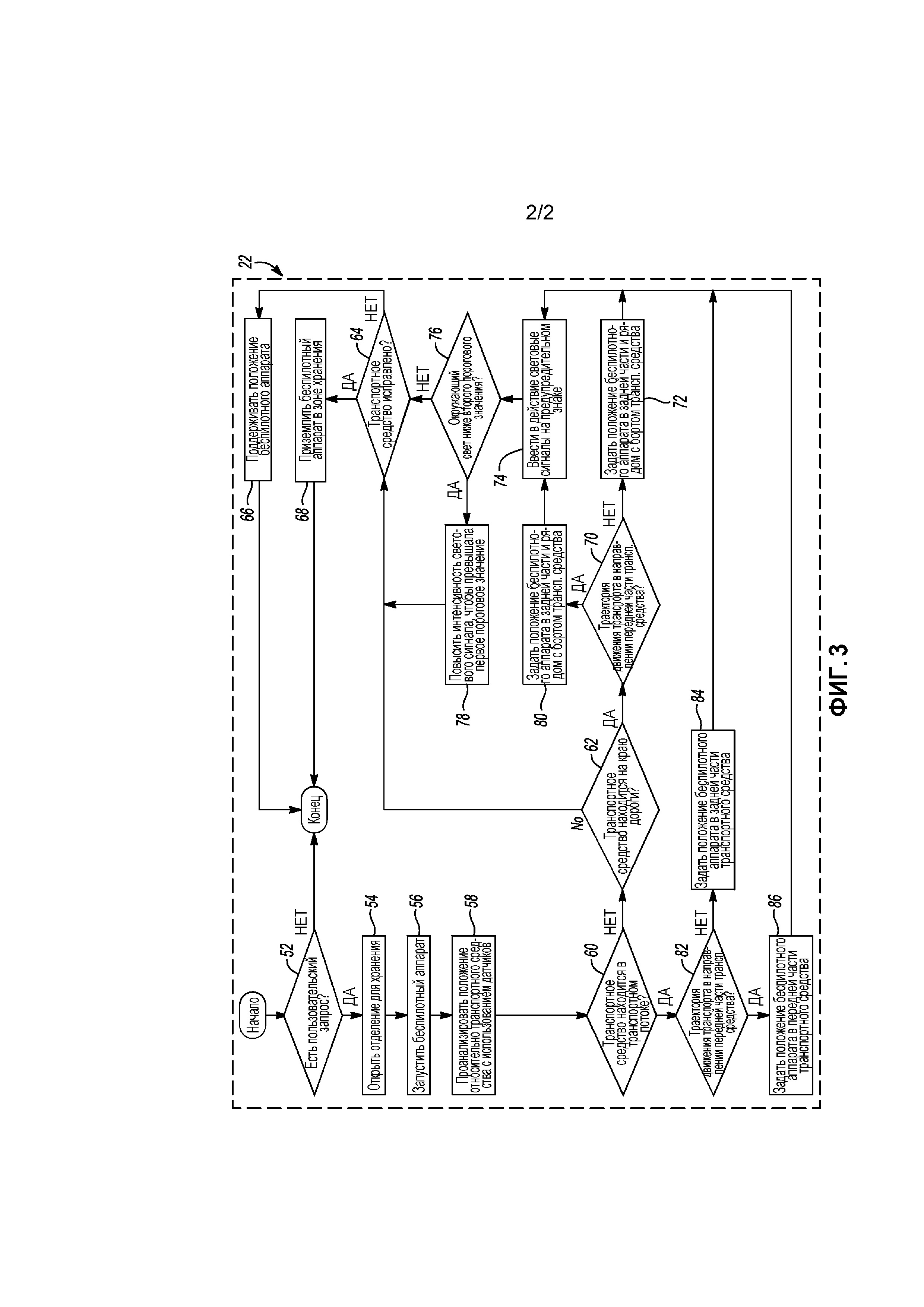
фиг. 3 - блок-схема последовательности операций логики управления, чтобы контроллер располагал предупредительный беспилотный аппарат аварийного оповещения.
Подробное описание изобретения
Варианты осуществления настоящего изобретения описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Чертежи не обязательно должны определять масштаб; некоторые признаки могли бы быть преувеличены или преуменьшены, чтобы показывать подробности конкретных компонентов. Поэтому, конкретные конструктивные и функциональные подробности, раскрытые в материалах настоящей заявки, должны интерпретироваться не в качестве ограничивающих, а только в качестве представляющих основу для обучения специалиста в данной области техники по-разному использовать настоящее изобретение. Как будут понимать рядовые специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любой один из чертежей, могут комбинироваться с признаками, проиллюстрированными на одном или более других чертежах, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают показательные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимые с доктринами этого изобретения, однако, могли бы быть желательны для конкретных применений или реализаций.
Беспилотный аппарат обычно является четырехвинтовым вертолетным летательным аппаратом с дистанционным управлением. Беспилотные аппараты могут быть спарены с наземными транспортными средствами для передачи информации на транспортное средство. Например, беспилотный аппарат может использоваться для выдачи трехмерного рельефа местности в навигационную систему для транспортного средства. Беспилотный аппарат также может использоваться для сообщения в ремонтную мастерскую наземного транспортного средства, когда наземному транспортному средству необходим ремонт. Беспилотные аппараты могут использоваться для сообщения многообразия другой информации, такой как когда транспортное средство находится в бедственном положении или не способно перемещаться, на другие транспортные средства на дороге. Например, беспилотный аппарат может использоваться для обмена информацией в аварийной ситуации эффективнее, чем дорожный набор, такой как неподвижный знак аварийной остановки.
На фиг. 1 показан вид сверху транспортного средства 10, имеющего беспилотную систему 12 для использования во время аварийной ситуации на дороге. Беспилотная система 12 включает в себя беспилотный аппарат 14, который имеет предупредительный знак 16, скрепленный с беспилотным аппаратом 14, хранимым в кузове 18, определяющим полость 20 транспортного средства 10. Беспилотная система 12 также включает в себя контроллер 22. Контроллер 22 может быть объединен с беспилотным аппаратом 14 или с транспортным средством 10. Кроме того, предупредительный знак 16 может быть любым предупредительным знаком 16, который может использоваться для предупреждения других транспортных средств (не показаны) о присутствии поврежденного транспортного средства 10. Кузов 18, определяющий полость 20, также может быть любым отделением для хранения или свободным пространством в транспортном средстве 10. Например, фиг. 1 изображает беспилотную систему 12, расположенного в задней части 24 транспортного средства 10. Однако, беспилотная система 12 может храниться где угодно в пределах транспортного средства 10.
Как будет подробно описано со ссылкой на другие чертежи, беспилотная система 12 обеспечивает лучшую дальность обнаружения, чем неподвижная предупредительная система. Использование беспилотного аппарата 14 для расположения предупредительного знака 16 обеспечивает более обширную и более свободную линию прямой видимости аварийной ситуации для других транспортных средств. Беспилотная система 12, кроме того, помогает информировать другие транспортные средства, что транспортное средство 10 повреждено, и рекомендуется внимание во время проезда мимо транспортного средства 10. Беспилотная система 12 может повышать осведомленность во время движения и может дополнительно помогать предотвращать дальнейшее столкновение с поврежденным транспортным средством 10. Использование динамичной беспилотной системы 12 для выдачи предупреждения об аварийной ситуации повышает заметность аварийной ситуации, повышая наглядность и осведомленность.
Фиг. 2 изображает схематический вид сверху поврежденного транспортного средства 10, использующего беспилотную систему 12 для предупреждения расположенного рядом транспортного средства 38 об аварийной ситуации. Фиг. 2 изображает поврежденное транспортное средство 10, в качестве находящегося в первой полосе 26 движения дороги 28. Однако, беспилотная система 12 также может использоваться, когда поврежденное транспортное средство 10 находится в пределах второй полосы 30 движения, или в то время как поврежденное транспортное средство 10 находится на обочине 32 дороги 28. Как будет описано со ссылкой на фиг. 3, беспилотная система 12 может быть выполнена с возможностью задавать положение беспилотного аппарата 14 и предупредительного знака 16, в зависимости от расположения поврежденного транспортного средства 10. Например, беспилотный аппарат 14 дополнительно может включать в себя множество датчиков 34 для выявления транспортного потока 36 вокруг транспортного средства 10, чтобы задавать положение беспилотного аппарата 14 для повышения видимости предупредительного знака 16 расположенному рядом транспортному средству 38. Расположенное рядом транспортное средство 38 может следовать в направлении задней части 24 транспортного средства 10 или может следовать в направлении передней части 40 транспортного средства 10. Подобным образом, расположенное рядом транспортное средство 38 может следовать в направлении задней части 24 транспортного средства 10 и рядом с бортом 42 транспортного средства 10 или следовать в направлении передней части 40 транспортного средства 10 и рядом с бортом 42 транспортного средства 10. Транспортный поток может быть двунаправленным, при котором расположенные рядом транспортные средства 38 могут следовать в двух разных направлениях, или однонаправленным, при котором расположенные рядом транспортные средства 38 могут следовать в одном направлении. Также, дорога 28 может иметь одну полосу движения, или иметь по меньшей мере две полосы движения.
Когда транспортное средство 10 повреждено, занимающий место человек (не показан) может запускать беспилотную систему 12. Контроллер 22 принимает сигнал, указывающий пользовательский запрос 44 запустить беспилотную систему 12. Например, занимающий место человек может отправлять пользовательский запрос 44, приводя в действие кнопку, расположенную в кабине (не показана) транспортного средства 10 или которая является внешней для транспортного средства 10, такой как на брелоке для ключей. Подобным образом, занимающий место человек может взаимодействовать с человеко-машинным интерфейсом для запуска беспилотной системы 12. Контроллер 22 открывает кузов 18 транспортного средства 10 и выпускает беспилотную систему 12 из полости 20 кузова 18. Беспилотная система 12 выполняет полет для указания, что транспортное средство 10 повреждено.
Беспилотная система 12 использует множество датчиков 34, таких как камера, ультразвуковой датчик, и/или измеритель ускорения, прикрепленный к беспилотному аппарату 14 для нанесения на карту расположения транспортного средства 10. Датчики 34 выдают данные местоположения, такие как положение беспилотного аппарата 14 относительно транспортного средства 10 и дороги 28, чтобы определять местонахождение беспилотного аппарата 14 относительно транспортного средства 10, а также расположенного рядом транспортного средства 38. Например, камера 46 может быть скреплена с беспилотным аппаратом 14 и соотносить в контроллере 22 положение транспортного средства 10 на дороге 28, к примеру, верхней части 25 транспортного средства 10 и поверхности 27 дороги 28, а также транспортного потока 36 вокруг транспортного средства 10, в том числе, положения расположенных рядом транспортных средств 38. Контроллер 22 использует данные с камеры 46 для повышения видимости беспилотной системы 12. Контроллер 22 задает положение беспилотной системы 12, с использованием данных из камеры 46, и сравнивает с предопределенными критериями предупреждения об опасности. Например, контроллер 22 может принимать данные из камеры 46, указывающие, что транспортное средство 10 повреждено в первой полосе 26 движения дороги 28, а транспортный поток 36 вокруг транспортного средства 10 указывает, что расположенное рядом транспортное средство 38 следует в направлении задней части 24 транспортного средства 10. Затем, контроллер 22 может задавать положение беспилотной системы 12, чтобы находилась приблизительно в 25 футах от задней части 24 транспортного средства 10, для повышения видимости беспилотной системы 12 12 расположенному рядом транспортному средству 38.
Контроллер 22 может вводить в действие предупредительный знак 16, скрепленный с беспилотным аппаратом 14 беспилотной системы 12. Предупредительный знак 16 может включать в себя знак 48 аварийной остановки, множество световых сигналов 50, или и то и другое. По меньшей мере в одном варианте осуществления, предупредительный знак 16 включает в себя как светоотражающий знак 48 аварийной остановки, так и множество световых сигналов 50. Прикрепление знака 48 аварийной остановки к беспилотному аппарату 14 повышает видимость знака 48 аварийной остановки, автоматически используя беспилотную систему 12 для расположения знака 48 аварийной остановки. Предупредительный знак 16 может быть сформирован как часть беспилотного аппарата 14 или может прикрепляться к беспилотному аппарату 14. Подобным образом, множество световых сигналов 50 повышает видимость, управляя интенсивностью множества световых сигналов 50. Например, контроллер 22 может быть выполнен с возможностью обеспечивать постоянное свечение множества световых сигналов 50 или предоставлять возможность для прерывистого свечения множества световых сигналов 50. По меньшей мере в одном варианте осуществления, контроллер 22 может обеспечивать прерывистое свечение множества световых сигналов 50, указывающее сигнал бедствия, с использованием традиционной азбуки Морзе, такой как, но не в качестве ограничения, SOS. Использование универсальных сигналов бедствия контроллером 22 для указания бедствия посредством множества световых сигналов 50 повышает осведомленность о поврежденном транспортном средстве 10 на дороге 28. Постоянное свечение может выполняться контроллером 22 с использованием постоянной частоты свечения световых сигналов 50.
Фиг. 3 изображает логику управления, чтобы контроллер 22 запускал и задавал положение беспилотной системы. Контроллер 22 может быть установленным в транспортном средстве контроллером или контроллером, соединенным с беспилотной системой для расположения беспилотной системы. Фиг. 3 изображает логику управления в качестве последовательной, однако, логика управления для контроллера 22 может реализовываться одновременно или совместно с другими аспектами логики управления, чтобы задавать положение беспилотной системы для повышения видимости предупредительного знака и предупреждения расположенных рядом транспортных средств о поврежденном транспортном средстве. Логика управления может реализовываться на одиночном контроллере 22 или многочисленных контроллерах 22, установленных в транспортном средстве, соединенных с беспилотной системой, или тех и других.
На 52, контроллер 22 определяет, был ли просигнализирован пользовательский запрос. Как изложено выше, пользовательский запрос может быть приведением в действие человеко-машинного интерфейса или нажимной кнопки. Если, на 52, пользовательский запрос не был просигнализирован, логика управления заканчивается. Однако, если, на 52, пользовательский запрос присутствует, контроллер 22 открывает отделение для хранения, содержащее в себе беспилотную систему, на 54. Открывание отделения для хранения на 54 предоставляет контроллеру 22 возможность запускать беспилотный аппарат на 56. Во время запуска на 56, контроллер 22 анализирует положение беспилотной системы относительно транспортного средства с использованием множества датчиков, как описано выше на 58. Анализ положения беспилотных систем на 58 предоставляет контроллеру 22 возможность надлежащим образом задавать положение беспилотной системы, так чтобы повышалась видимость и осведомленность о предупредительном знаке. По мере того как контроллер 22 принимает и анализирует данные с датчиков, чтобы задавать положение беспилотной системы относительно транспортного средства на 58, контроллер 22 определяет, находится ли транспортное средство в транспортном потоке, на 60.
Если, на 60, контроллер 22 определяет, что транспортное средство не находится в транспортном потоке, контроллер, с использованием датчиков из беспилотной системы, определяет, на 62, находится ли транспортное средство на обочине или краю дороги. Если, на 62, контроллер 22 определяет, что транспортное средство не на краю дороги, контроллер 22 определяет, на 64, исправлено ли транспортное средство, или было ли отремонтировано. Если контроллер 22, на 64, определяет, что транспортное средство не было отремонтировано, или исправлено, контроллер 22 дает команду беспилотной системе поддерживать положение беспилотного аппарата, на 66. Однако, если на 64 контроллер 22 определяет, что транспортное средство было отремонтировано, контроллер 22 дает команду беспилотному аппарату приземлиться в отделение для хранения на 68 для возврата беспилотной системы в транспортное средство. Контроллер 22 может определять, что транспортное средство было отремонтировано, на 64, принимая другой пользовательский запрос или проверяя системы транспортного средства, чтобы гарантировать надлежащую работу.
Возвращаясь на 62, если контроллер 22 определяет, что транспортное средство находится на краю дороги, контроллер 22 использует множество датчиков в беспилотной системе для определения, следует ли траектория транспортного потока в направлении передней части транспортного средства, на 70. Если, на 70, контроллер 22 определяет, что транспортный поток не следует в направлении передней части транспортного средства, а следует в направлении задней части транспортного средства, контроллер 22 задает положение беспилотного аппарата, чтобы находился в задней части, рядом с бортом транспортного средства, на 72. Расположение беспилотной системы, находящейся в задней части или рядом с бортом транспортного средства, на 72, предоставляет беспилотной системе возможность быть видимой транспортным средствам, проезжающим поврежденное транспортное средство на обочине дороги. Как изложено выше, посредством надлежащего расположения беспилотной системы на основании местоположения поврежденного транспортного средства на дороге, контроллер 22 доводит до максимума видимость и осведомленность о поврежденном транспортном средстве. На 74, контроллер 22 вводит в действие множество световых сигналов на предупредительном знаке беспилотной системы. Как описано выше, контроллер 22 может предоставлять световым сигналам возможность, на 74, поддерживать постоянное свечение или прерывистое свечение.
Контроллер 22 также определяет, находится ли рассеянный свет, окружающий беспилотную систему ниже второго порогового значения, на 76. Определение, находится ли рассеянный свет, окружающий беспилотную систему, ниже второго порогового значения, на 76, предоставляет контроллеру 22 возможность определять, было ли повреждено транспортное средство ночью. Это предоставляет беспилотной системе возможность быть видимой во время поломки транспортного средства в ночное время. Если, на 76, контроллер определяет, что рассеянный свет находится ниже второго порогового значения, контроллер 22 может повышать интенсивность света предупредительного знака, чтобы превышала первое пороговое значение, на 78. Повышение интенсивности световых сигналов на предупредительном знаке, на 78, дополнительно повышает видимость беспилотной системы и предоставляет предупредительному знаку возможность быть более видимым для транспортного потока вокруг транспортного средства. Если, на 76, контроллер 22 определяет, что рассеянный свет не находится ниже второго порогового значения или повышает интенсивность света, чтобы превышала первое пороговое значение, на 78, контроллер 22 будет снова определять, было ли отремонтировано транспортное средство, на 64, как описано выше, и будет придерживаться логики управления, описанной выше. Возвращаясь на 70, если контроллер 22 определяет, что траектория транспортного потока следует в направлении передней части транспортного средства, контроллер 22 будет задавать положение беспилотного аппарата, чтобы находилось в задней части и рядом с бортом транспортного средства, на 80. Контроллер 22 будет вводить в действие световые сигналы на предупредительном знаке, на 74, как описано выше, и также будет придерживаться логики управления, описанной выше, чтобы приземлять беспилотный аппарат на 68 или поддерживать положение беспилотного аппарата на 66, заканчивая логику управления.
Возвращаясь на 60, если контроллер определяет, что транспортное средство находится в транспортном потоке, контроллер 22 определяет, следует ли траектория транспортного потока в направлении передней части транспортного средства, на 82. Если, на 82, контроллер 22 определяет, что траектория транспортного потока следует не в направлении передней части транспортного средства, а в направлении задней части транспортного средства, контроллер 22 задает положение беспилотной системы, чтобы находилась в задней части транспортного средства, на 84. Посредством размещения беспилотной системы в задней части транспортного средства, на 84, контроллер 22 повышает видимость предупредительного знака, когда транспортное средство повреждено на середине полосы движения. Это предоставляет беспилотной системе, и как таковому предупредительному знаку, на 84, возможность быть видимым на должном расстоянии для предупреждения других транспортных средств, что транспортное средство повреждено и блокирует полосу движения. Контроллер 22 будет вводить в действие световые сигналы на предупредительном знаке на 74, как описано выше, и будет придерживаться логики управления, описанной выше, чтобы приземлять беспилотный аппарат, на 68, или поддерживать положение беспилотного аппарата на 66, заканчивая логику управления.
Если, на 82, контроллер 22 определяет, что траектория транспортного потока следует в направлении передней части транспортного средства, контроллер 22 задает положение беспилотной системы, чтобы находилось в передней части транспортного средства, на 86. Посредством размещения беспилотной системы в передней части транспортного средства на 86, контроллер 22 повышает видимость предупредительного знака, когда транспортное средство повреждено на середине полосы движения, и встречное движение может быть направлено на переднюю часть транспортного средства в пределах такой полосы движения. Это предоставляет беспилотной системе, и как таковому предупредительному знаку, на 86, возможность быть видимой на должном расстоянии, чтобы предупреждать другие транспортные средства, что транспортное средство повреждено и блокирует полосу движения, в которой может двигаться встречное движение. Контроллер 22 будет вводить в действие световые сигналы на предупредительном знаке, на 74, как описано выше, и также будет придерживаться логики управления, описанной выше, чтобы приземлять беспилотный аппарат, на 68, или поддерживать положение беспилотного аппарата на 66, заканчивая логику управления.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы, охваченные формулой изобретения. Словесные формулировки, используемые в описании изобретения, скорее являются словесными формулировками описания, нежели ограничения, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т.д. По существу, варианты осуществления, описанные как желательные в меньшей степени, чем другие варианты осуществления или реализации предшествующего уровня техники, что касается одной или более характеристик, не выходят за пределы объема изобретения и могут быть желательны для конкретных применений.
Способ для двигателя с идентификацией топлива на основании ускорения коленчатого вала (варианты)
Способ и устройство для отображения кисти руки оператора элемента управления транспортного средства
Способ для двигателя (варианты)
Способ для топливной системы (варианты) и топливная система транспортного средства
Способ для многоцилиндрового двигателя (варианты) и система для двигателя
Способ диагностирования системы охлаждения двигателя (варианты) и система транспортного средства
Способ для форсированного двигателя, способ для двигателя и система для двигателя
Способ запуска двигателя (варианты) и система управления двигателем
Способ для двигателя (варианты) и система
Способ для системы охлаждения двигателя (варианты) и система транспортного средства

