Результат интеллектуальной деятельности: СИСТЕМА ПРИВОДИМЫХ В ДЕЙСТВИЕ ПОДВИЖНЫХ ПЛАТФОРМ
Вид РИД
Изобретение
Область техники
Настоящее изобретение, в целом, относится к области парков развлечений. В частности, варианты выполнения настоящего изобретения относятся к приводимым в действие подвижным платформам.
Уровень техники
Аттракционы для катания в тематических парках или парках развлечений становятся все более популярными. Определенные типы аттракционов для катания обеспечивают захватывающие ощущения, которые включают в себя изображения, звуки и/или физические эффекты (например, эффекты дыма), которые используются в сочетании с движением по аттракциону для катания. Например, Движение пассажирского транспортного средства может быть синхронизировано с проецируемыми изображениями, чтобы подчеркнуть ощущение скорости или падения. В зависимости от типа пассажирского транспортного средства или аттракциона для катания различные типы движения могут дополнять ощущение от аттракциона для катания. Путевые транспортные средства способны двигаться вперед или поступательно вдоль оси пути. В дополнение, такие транспортные средства могут быть способны к другим типам движения. Для некоторых аттракционов для катания пассажирские транспортные средства перемещаются через подвижную платформу, которая может перемещать пассажирскую платформу или транспортное средство аттракциона для катания в нескольких различных направлениях, включая угловые перемещения, такие как крен, тангаж и рыскание, и линейные перемещения, такие как вертикальная качка и продольное перемещение. Эти различные степени свободы могут использоваться для имитации эффекта реального перемещения синхронно с проецируемыми изображениями или киноизображением. Например, в аттракционе для катания, который пытается имитировать ощущение езды по городским улицам в автомобиле, подвижная платформа может использовать сочетание крена и рыскания, чтобы давать пассажирам ощущение движения в крутых поворотах, в то время как изображение на экране показывает вид закругления кривой на улице. Однако для перемещения тяжелых пассажирских транспортных средств такие подвижные платформы являются соответственно большими и тяжелыми и в связи с этим энергонеэффективными.
Сущность изобретения
Некоторые варианты выполнения, соизмеримые по объему охраны с первоначально заявленным объектом изобретения, приведены ниже. Эти варианты выполнения не предназначены для ограничения объема охраны изобретения, а, точнее, эти варианты выполнения предназначены только для обеспечения краткого изложения некоторых раскрытых вариантов выполнения. Более того, настоящее изобретение может охватывать множество форм, которые могут быть подобны или отличаться от вариантов выполнения, изложенных ниже.
В соответствии с одним вариантом выполнения система аттракциона для катания парка развлечений включает в себя одну или более подвижных платформ. Каждая подвижная платформа включает в себя корпус; площадку, выполненную с возможностью перемещения относительно корпуса вдоль направляющего пути при приведении в действие; исполнительный механизм, соединенный с площадкой и выполненный с возможностью вызывать приведение в действие площадки; противовес, соединенный с площадкой и выполненный с возможностью изменения внутреннего давления или перемещения, когда площадка приводится в действие; и одну или более направляющих движения, соединенных с площадкой и выполненных с возможностью перемещения вместе с площадкой относительно корпуса, когда площадка приводится в действие, для определения перемещения площадки вдоль направляющего пути; и контроллер, соединенный с одной или более подвижными платформами и выполненный с возможностью независимого управления исполнительным механизмом каждой подвижной платформы.
В соответствии с другим вариантом выполнения способ включает в себя этапы, на которых принимают сигнал, указывающий что транспортное средство размещено на системе подвижных платформ; и приводят в действие множество подвижных платформ системы подвижных платформ для приведения в действие независимо друг от друга, чтобы вызывать крен, тангаж, вертикальную качку, рыскание, поперечное перемещение или продольное перемещение транспортного средства. Приведение в действие множества подвижных платформ включает в себя этапы, на которых обеспечивают первый сигнал для электрического исполнительного механизма, связанного с первой подвижной платформой; приводят в действие подвижную площадку первой подвижной платформы для перемещения на первое расстояние относительно ее корпуса в первый момент времени; обеспечивают второй сигнал для электрического исполнительного механизма, связанного со второй подвижной платформой; и приводят в действие подвижную площадку второй подвижной платформы для перемещения на второе расстояние относительно ее корпуса в первый момент времени.
В соответствии с другим вариантом выполнения система подвижной платформы включает в себя подвижную платформу. Подвижная платформа включает в себя корпус; площадку, выполненную с возможностью перемещения относительно корпуса при приведении в действие; исполнительный механизм, соединенный с площадкой и выполненный с возможностью вызывать приведение в действие площадки; противовес, соединенный с площадкой и выполненный с возможностью нести вес площадки и дополнительную нагрузку, содержащую часть большей части статического веса и/или динамической инерции нагрузки, опирающейся на или соединенной с площадкой; одну или более направляющих движения, соединенных с площадкой и выполненных с возможностью перемещения вместе с площадкой относительно корпуса, когда площадка приводится в действие, для определения перемещения площадки; и контроллер, соединенный с подвижной платформой и выполненный с возможностью управления исполнительным механизмом для приведения в действие площадки для перемещения между множеством положений в качестве части схемы приведения в действие.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения станут лучше понятны после прочтения следующего далее подробного описания со ссылкой на сопровождающие чертежи, на которых одинаковые символы представляют одинаковые части на всех чертежах, на которых:
Фиг. 1 - схематический вид приводимой в действие в вертикальном направлении системы подвижных платформ, используемой совместно с путем транспортного средства, в соответствии с настоящими методиками;
Фиг. 2 - схематическое изображение системы подвижных платформ с Фиг. 1 в конфигурации приведения в действие в соответствии с настоящими методиками;
Фиг. 3 - вид сбоку в разрезе отдельной подвижной платформы системы подвижных платформ с Фиг. 1 в положении приведения в действие в соответствии с настоящими методиками;
Фиг. 4 - вид в поперечном сечении варианта выполнения отдельной подвижной платформы системы подвижных платформ в соответствии с настоящими методиками;
Фиг. 5 - вид сверху устройства, включающего в себя несколько подвижных платформ, в соответствии с настоящими методиками;
Фиг. 6 - вид в поперечном сечении устройства с Фиг. 5;
Фиг. 7 - блок-схема варианта выполнения способа приведения в действие системы подвижных платформ в соответствии с настоящими методиками;
Фиг. 8 - блок-схема варианта выполнения способа приведения в действие системы подвижных платформ в соответствии с настоящими методиками; и
Фиг. 9 - вид сверху размещения подвижных платформ в соответствии с настоящими методиками.
Подробное описание изобретения
В настоящем документе обеспечена система подвижных платформ для использования совместно с аттракционом для катания парка развлечений. Аттракционы для катания на основе транспортного средства становятся все более сложными, при этом конструкторы аттракционов для катания включают визуальные, звуковые эффекты и эффекты на основе движения в аттракционы для катания, которые дополняют тему аттракционов для катания, и которые обеспечивают более захватывающее ощущение. Некоторые транспортные средства аттракциона для катания способны обеспечивать встроенные эффекты аттракциона для катания, например, посредством использования бортовых динамиков и проекционных экранов, а также посредством управления движением транспортного средства с использованием встроенных эффектов движения, размещенных в транспортном средстве, которые могут наклонять или встряхивать транспортное средство для усиления описательной части аттракциона для катания. Например, если проекционный экран показывает, что транспортное средство приближается к виртуальной скале, транспортное средство может наклоняться вперед, чтобы имитировать падение со сколы путем наклона пассажирской кабины относительно части транспортного средства, которая остается на месте.
Однако, так как транспортные средства ограничены по весу и мощности, их встроенные эффекты движения подобным образом ограничены. Для более драматических эффектов движения конструкторы аттракционов для катания могут включать движущие элементы непосредственно в путь движения транспортного средства. То есть эффекты движения могут быть созданы путем перемещения пола или пути, чтобы вызывать перемещение транспортного средства, размещенного в местоположении элемента. Такие элементы могут быть реализованы в сочетании с частями описательной части аттракциона для катания для создания крупномасштабных эффектов движения, которые могут, например, имитировать подбрасывание на волнах, подъем монстром, обстрел и т.д. В одном примере такой методики транспортное средство аттракциона ездит по большой платформе, которая может вращаться, поворачиваться, наклоняться и т.д., чтобы побуждать транспортное средство соответственно перемещаться вместе с платформой. Хотя такие платформы могут быть способны создавать более масштабные эффекты движения, их реализация является сложной. Например, так как платформы имеют такие размеры, чтобы поднимать все транспортное средство, они обычно являются большими и тяжелыми. Приведение в действие таких больших и тяжелых платформ также может включать в себя использование гидравлических исполнительных механизмов, которые, в свою очередь, создают жидкие отходы, что влечет за собой дополнительные процедуры для надлежащей утилизации.
Настоящие методики обеспечивают систему подвижных платформ, которая меньше и легче систем на основе одной платформе и в связи с этим не требует использования гидравлических исполнительных механизмов для генерирования достаточного усилия приведения в действие. Система подвижных платформ включает в себя распределенные площадки приведения в действия, каждая из которых поддерживает только часть данного транспортного средства аттракциона для катания. Соответственно, так как вес транспортного средства распределяется, каждая подвижная платформа может быть меньше, компактнее и в общем более энергоэффективной относительно системы на основе одной платформы. В некоторых вариантах выполнения подвижные платформы включают в себя противовесы, которые поддерживают вес на каждой площадке подвижной платформы так, что усилия приведения в действие каждой подвижной платформы направлены на ускорение приводимых в действие компонентов, а не на поддержание веса транспортного средства, что предполагает в общем более низкие усилия, чем используемые для поддержания веса. Таким образом, система подвижных платформ может генерировать меньше объединенного усилия приведения в действие на единицу веса транспортного средства, чем системы на основе одной платформы, что, в свою очередь, обеспечивает большую гибкость и улучшения распределения мощности и мощностных характеристик для системы. В другом варианте выполнения распределенное приведение в действие также способствует повышению гибкости при создании схем приведения в действие для создания более сложных эффектов движения.
Хотя настоящие методики раскрыты в сочетании с аттракционом для катания парка развлечений для создания эффектов движения для транспортного средства аттракциона для катания, другие варианты выполнения могут включать в себя приводное движение в других подходящих условиях. Например, раскрытые подвижные платформы могут использоваться в сочетании с аниматроникой, физическими эффектами, тренажерами полета или боевых действий и т.д. В одном варианте выполнения система подвижных платформ может включать в себя распределенные подвижные платформы, которые поддерживают перемещение различных элементов аниматронной фигуры. Например, аниматронная фигура может быть размещена на подвижной платформе для получения перемещения фигуры в сочетании с перемещением подвижной платформы. В другом варианте выполнения система подвижных платформ может включать в себя подвижные платформы, которые поддерживают перемещение крупномасштабных подвижных элементов в аттракционе для катания парка развлечений, например, элементов, которые не перевозят пассажиров, но которые дополняют впечатление от аттракциона для катания путем перемещения для поддержки описательной части аттракциона для катания. Например, такие элементы могут включать в себя трансформирующиеся автомобили, судна с имитацией движения воды или физические барьеры или ворота в аттракционе для катания, которые изменяют положения по мере приближения транспортных средств.
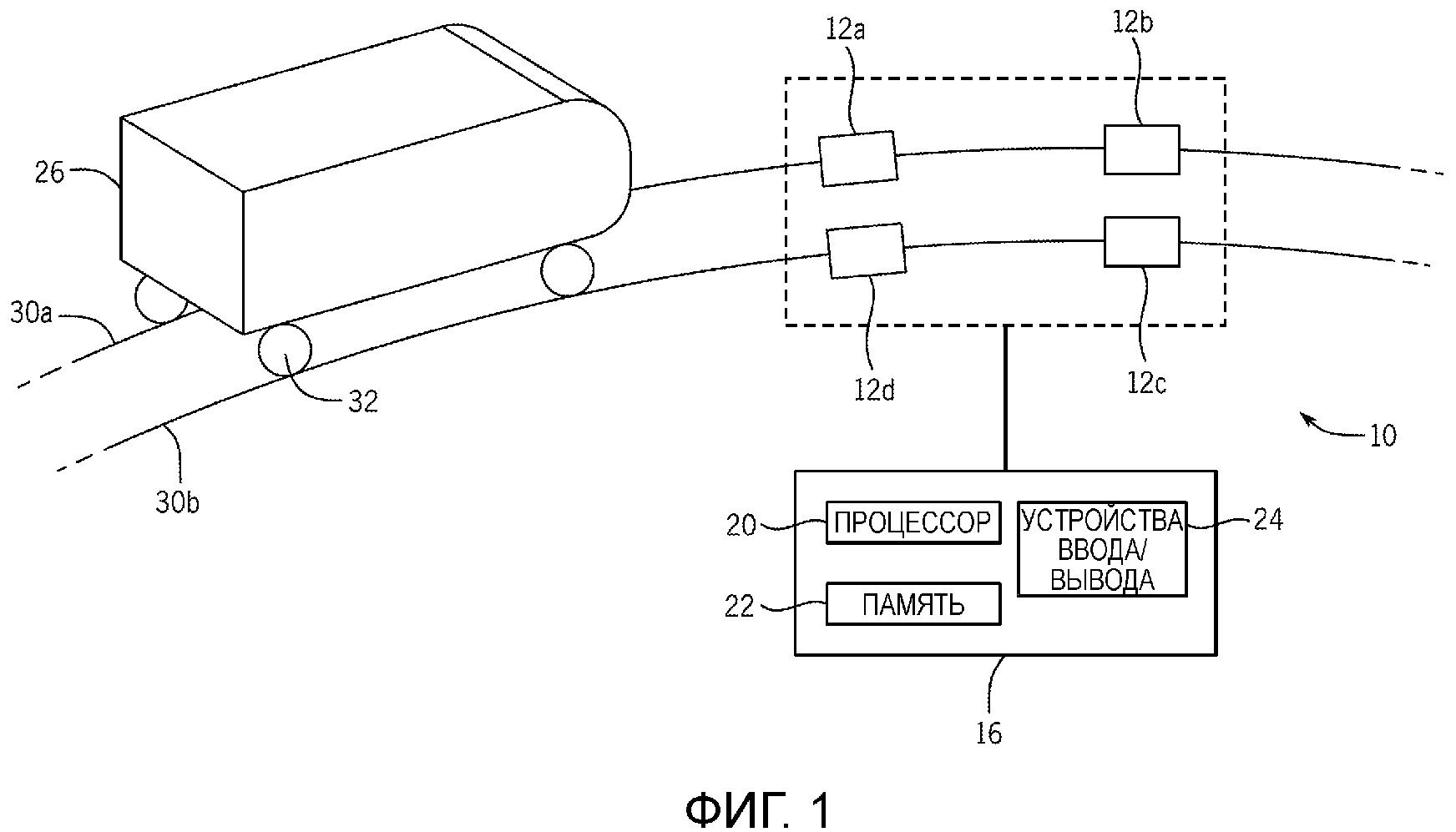
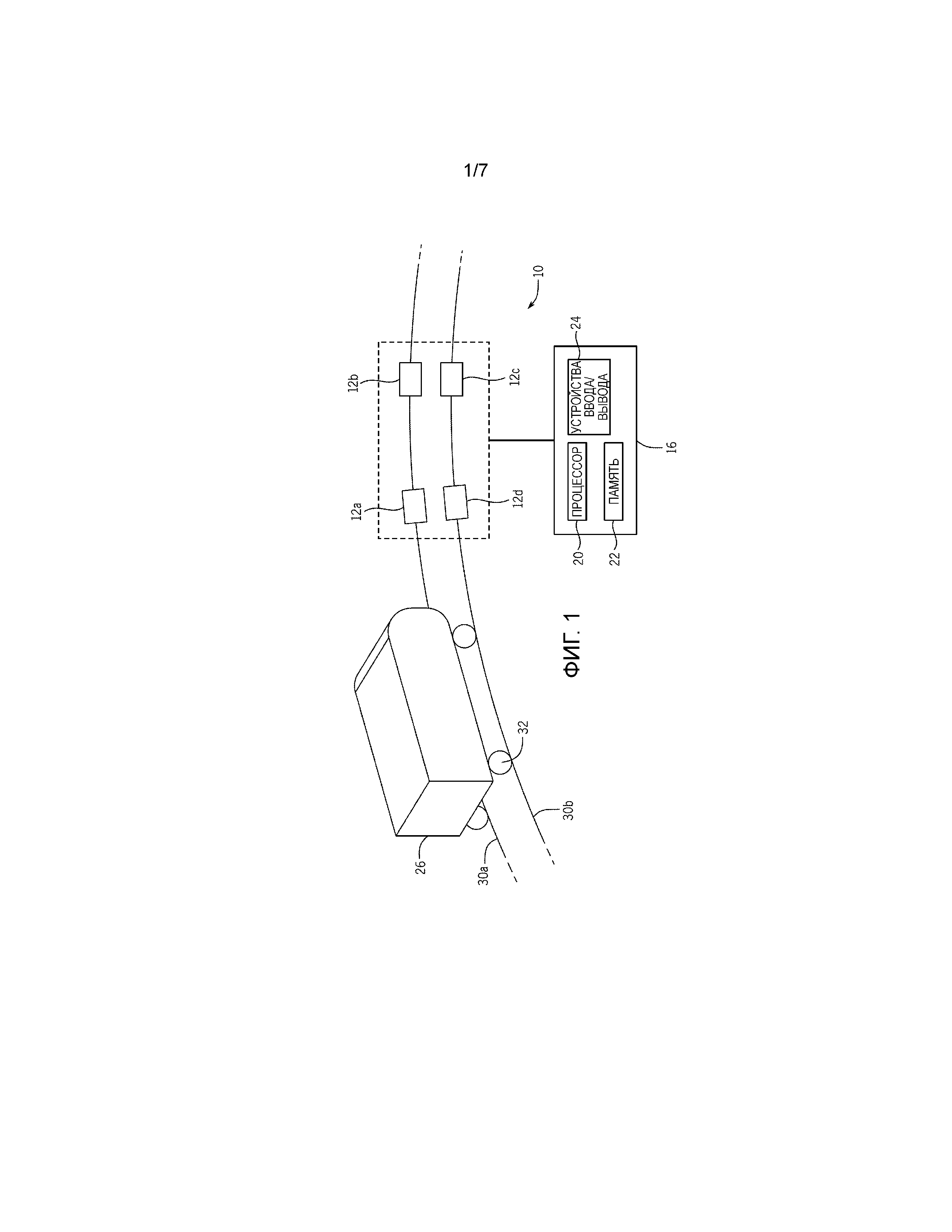
Фиг. 1 представляет собой схематический вид системы 10 подвижных платформ в соответствии с раскрытыми методиками, которая включает в себя по меньшей мере одну приводимую в действие подвижную платформу 12 (подвижные платформы 12a, 12b, 12c и 12d в проиллюстрированном варианте выполнения). Подвижные платформы 12 соединены напрямую или по беспроводной связи с контроллером 16, который выполнен с возможностью обеспечения сигналов для каждой подвижной платформы 12 для управления подвижными платформами 12 независимо друг от друга. С этой целью контроллер 16 может работать в соответствии с инструкциями, выполняемыми процессором 20 и хранящимися в памяти 22. В дополнение, контроллер 16 может иметь элементы управления ввода/вывода для облегчения взаимодействия оператора с системой 10, а также для связи с другими компонентами системы 10. В конкретных вариантах выполнения подвижные платформы 12 могут использоваться в сочетании с транспортным средством аттракциона для катания парка развлечений, чтобы вызывать перемещение транспортного средства 26 в соответствии с приведением в действие подвижных платформ 12. Настоящие методики могут использоваться для создания эффектов движения для транспортных средств, которые движутся вдоль маршрута аттракциона для катания по пути 30, например, по пути, который включает в себя рельсы 30a и 30b. В некоторых вариантах выполнения путь может быть направляющим путем, виртуальным путем, или транспортное средство может перемещаться независимо от пути. В таких вариантах выполнения система 10 подвижных платформ может быть встроена вдоль пути аттракциона для катания в полу или в другом участке, по которому проходит транспортное средство 26.
При вхождении на участок пути 30, включающий в себя систему 10 подвижных платформ, транспортное средство 26 может быть запрограммировано приостанавливаться, чтобы позволять системе 10 подвижных платформ инициировать движение. Система 10 может определять, что транспортное средство 26 находится в требуемом положении на основе сигналов, обеспечиваемых одним или более датчиками на транспортном средстве 26 и/или на системе 10 подвижных платформ или на пути 30. Один или более датчиков могут быть соединены с контроллером 16 для обеспечения входного сигнала, который запускает инициирование движения с помощью системы 10 подвижных платформ. Используя множество подвижных платформ, которые перемещаются по определенным схемам, система 10 подвижных платформ способна вызывать движение транспортного средства в нескольких степенях свободы. Такое движение может включать в себя тангаж, крен и вертикальную качку, а также продольное перемещение, поперечное перемещение и рыскание, как по отдельности, так и в сочетании друг с другом. То есть для устройств, которые выполнены с возможностью приведения в действие в вертикальном направлении и в группах по четыре, размещенных прямолинейно на виде сверху, подвижные платформы могут быть выполнены с возможностью вызывать тангаж, крен и вертикальную качку. Для устройства с изогнутыми или угловыми путями подвижные платформы могут быть выполнены с возможностью создания рыскания, поперечного перемещения и продольного перемещения. Соответственно, подвижные платформы могут быть выполнены с возможностью создания всех шести степеней свободы, в зависимости от реализации и размещения подвижных платформ.
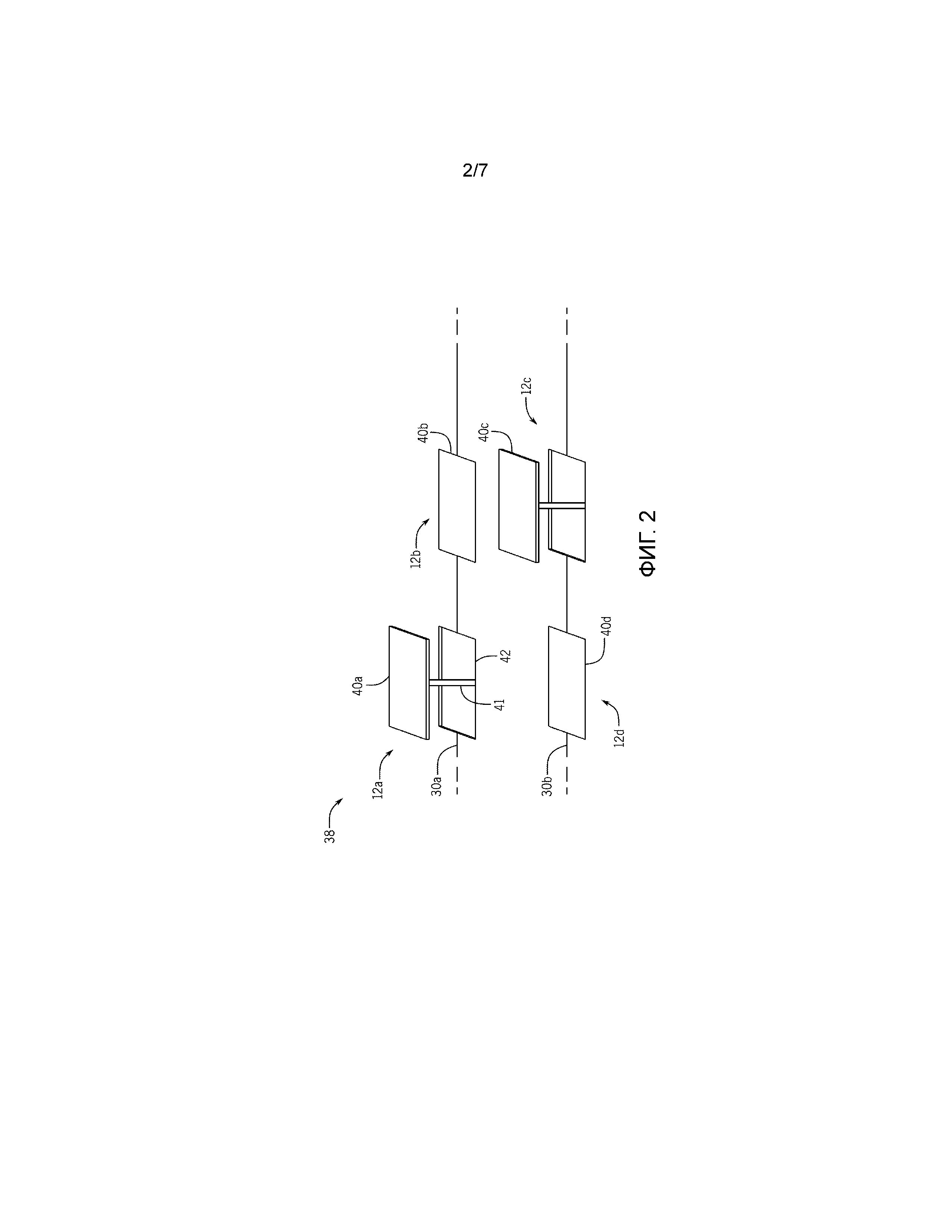
Фиг. 2 представляет собой схематический вид конфигурации 38 приведения в действие системы подвижных платформ, как на Фиг. 1, в которой подвижные платформы 12 были независимо приведены в действие, например, как часть схемы приведения в действие. Как проиллюстрировано, в конфигурации 38 приведения в действие подвижная площадка 40 подвижной платформы приводится в действие вертикально от пути 30 и из корпуса 42 подвижной платформы. Каждая из площадок 40 (40a, 40b, 40c 40d) соединена с соответствующим валом 41 приведения в действие, который поднимает или опускает свою соответствующую площадку 40 в соответствии с перемещением исполнительного механизма в соответствии с инструкциями от контроллера 16 (см. Фиг. 1). Например, на Фиг. 2 часть площадки 40 приведена в действие вертикально относительно пути 30, в то время как другие площадки 40 по-прежнему находятся на одном уровне с путем 30, т.е. не приведены в действие. Например, в одном варианте выполнения схема приведения в действие включает в себя приведение в действие одной площадки, например, 40a и 40c, на каждом рельсе, например, 30a и 30b, выше уровня пути 30, в то время как другие площадки 40b и 40d остаются на одном уровне с полом. Если подвижные платформы 12 выполнены так, что каждая подвижная платформа 12 соответствует углам или колесам транспортного средства 26, такое неравномерное приведение в действие на колесах или углах может приводить к движению тангажа, крена или вертикальной качки. В других вариантах выполнения транспортное средство 26, обеспеченное в настоящем документе, может быть выполнено с полозьями, магнитной подвеской, воздушной подушкой и т.д.
Следует понимать, что проиллюстрированный вариант выполнения представляет собой один пример конфигурации 38 приведения в действие, и раскрытые схемы приведения в действие могут включать в себя множество различных конфигураций приведения в действие, реализуемых последовательно или параллельно. Схемы приведения в действие могут включать в себя любое количество конфигураций приведения в действие. В одном варианте выполнения схема приведения в действие может включать в себя или начинаться с конфигурации покоя или неактивной конфигурации, в которой все площадки 40 находятся на одном уровне с путем 30 или полом для создания относительно гладкой поверхности, чтобы позволять транспортному средству 26 заезжать на подвижные платформы 12. В некоторых вариантах выполнения площадки 40 могут включать в себя выступ или другие элементы для помощи в позиционировании колес на площадках 40. Схема приведения в действие также может заканчиваться неактивной конфигурацией, чтобы позволять транспортному средству 26 перемещаться мимо системы 10 подвижных платформ и завершать аттракцион для катания. Неактивная конфигурация может приблизительно выравнивать плоскости каждой площадки 40 друг с другом и с путем 30. В другом варианте выполнения, так как контроллер 16 выполнен с возможностью перемещения площадки 40 каждой подвижной платформы 12 независимо от других площадок 40, конфигурация приведения в действие может включать в себя только одну площадку 40, приводимую в действие в положении вне своего корпуса 42, только две или три площадки, приводимые в действие в положении вне своего корпуса 42, или все площадки 40, приводимые в действие в положении вне своих соответствующих корпусов 42.
Изображенный вариант выполнения включает в себя четыре подвижных платформы 12, которые в общем имеют такие размеры и размещены так, чтобы выравниваться с четырьмя колесами транспортного средства 26. В одном варианте выполнения четыре подвижные платформы 12 образуют вершины прямоугольника или квадрата. В другом варианте выполнения четыре подвижные платформы 12 разнесены так, что их корпусы 42 не находятся в непосредственном контакте друг с другом, хотя подвижные платформы 12 могут быть электрически соединены с помощью одного или более электрических проводов с контроллером и/или с общим источником питания. Однако следует понимать, что система 10 может быть реализована с любым подходящим количеством подвижных платформ 12. Например, система 10 может включать в себя 1, 2, 3, 4, 5, 6 или более подвижных платформ 12. Дополнительно, каждый отдельный аттракцион для катания может включать в себя несколько систем 10 подвижных платформ.
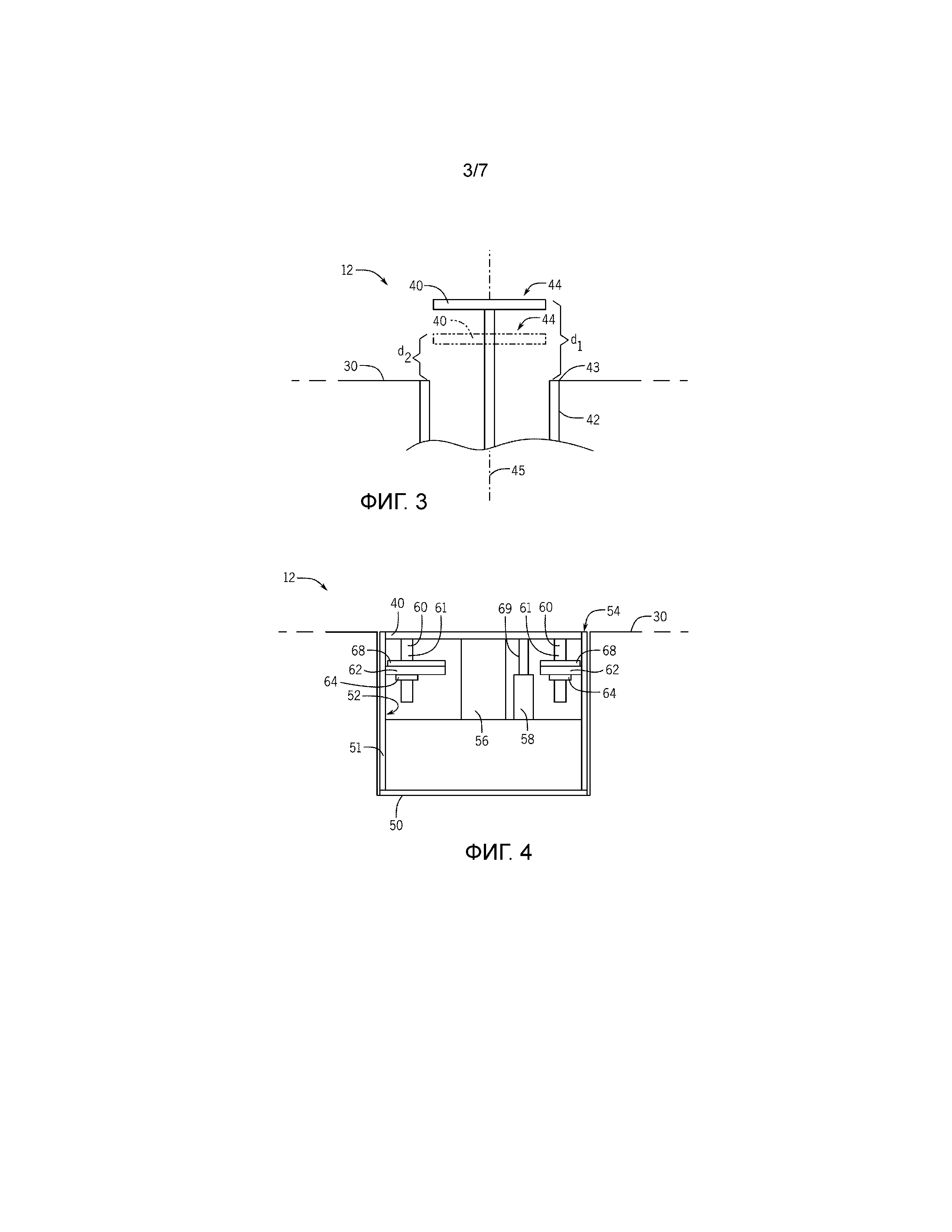
Фиг. 3 представляет собой вид сбоку в разрезе отдельной подвижной платформы 12, на котором подвижная площадка 40 приводится в действие из корпуса 42. Максимальное расстояние d1 приведения в действие может быть определено расстоянием между любым неподвижным компонентом подвижной платформы 12 или полом или путем 30 и любым приводимым в действие компонентом, который приводится в действие вместе с площадкой 40. В изображенном варианте выполнения максимальное расстояние d1 приведения в действие определяется расстоянием между верхней поверхностью корпуса 42 (или поверхностью пути 30 или пола аттракциона для катания) и верхней поверхностью 44 площадки 40 вдоль оси 45, которая приблизительно ортогональна плоскости, образованной площадкой 40. Площадка 40 может приводиться в действие между неактивной конфигурацией, которая может быть на одном уровне с полом или путем 30 или с верхней поверхностью 43 корпуса 42, и конфигурацией максимального расстояния приведения в действие, в которой площадка 40 приводится в действие на расстояние d1. Дополнительно, площадка 40 может быть приведена в действие в соответствии с инструкциями контроллера во множество положений между неактивной конфигурацией и конфигурацией максимального расстояния приведения в действие, таким образом, что расстояние d2 может быть любым расстоянием, большим нуля, вплоть до d1 включительно. Так как каждая площадка 40 подвижной платформы может быть приведена в действие отдельно в положения, имеющие расстояние между нулем и d1 включительно, отдельная конфигурация приведения в действие может включать в себя нескольких возможных расстояний приведения в действие для каждой площадки 40. Например, конфигурация приведения в действие может включать в себя позиционирование соответствующих площадок 40 на множестве отдельных расстояний d2, которые все отличаются друг от друга. В некоторых вариантах выполнения площадки 40 также могут приводиться в действие в положения в пределах корпус 42 так, что площадка 40 может быть углублена в корпусе и ниже уровня пола. В таких вариантах выполнения максимальное расстояние углубления может быть определено положениями внутренних компонентов подвижной платформы, например, длиной вала 41 приведения в действие. Дополнительно, соответствующие площадки 40 в конфигурации с несколькими площадками могут приводиться в действие вдоль осей, приблизительно параллельных друг другу в некоторых вариантах выполнения.
Фиг. 4 представляет собой вид в поперечном сечении одной реализации подвижной платформы 12. Подвижная платформа 12, как проиллюстрировано, размещена в пределах корпуса 50, имеющего приблизительно параллельные боковые стенки 51, образующие внутренние поверхности 52 и заканчивающиеся на проксимальных концах 54, которые находятся рядом с путем 30. Однако предполагаются другие реализации (например, непараллельные боковые стенки 51). Площадка 40 имеет такие размеры и форму, чтобы она вписывалась в пространство, образованное боковыми стенками 51, и в некоторых вариантах выполнения может герметизировать или закрывать внутреннюю часть подвижной платформы 12, находясь в неактивной конфигурации, как изображено. Подвижная платформа 12 также включает в себя противовес, соединенный с площадкой 40, который поддерживает вес площадки 40 и в некоторых вариантах выполнения выполнен с возможностью поддержки веса, размещенного на площадке 40. Противовес может быть камерой для текучей среды, пружиной (например, пневматической пружиной, газовой пружиной, механической пружиной, магнитной пружиной, пружиной, включающей в себя квантовые блокирующие элементы, пневматической пружиной), масляно-пневматической стойкой или подобными конструкциями. В некоторых вариантах выполнения противовес может быть пружиной, выполненной в виде спирали, пластины, торсионного стержня, пакета тарельчатых пружин и т.д. В другом варианте выполнения противовес может быть снаряженным весом, действующим на подвижную платформу 12 через рычажный привод, простой рычаг, качающуюся кулису и т.д. Дополнительно, следует понимать, что противовес может включать в себя одну или более конструкций противовеса, обеспеченных в данном документе.
Подвижная платформа 12 также может включать в себя исполнительный механизм 58, который может включать в себя один или более электродвигателей и соответствующие устройства, например, поворотный привод, сервопривод или т.п. Исполнительный механизм 58 может быть электрическим, пневматическим или гидравлическим или любым их сочетанием. Однако в конкретных вариантах выполнения система 10 подвижных платформ не включает в себя никаких гидравлических компонентов. Электродвигатель может быть соединен с контроллером 16 (см. Фиг. 1), либо по беспроводной связи, либо с помощью электрических проводов, и с отдельным или общим источником питания. В дополнение, подвижная платформа 12 может включать в себя один или более компонентов 60 управления движением, которые направляют движение приведения в действие. В изображенном варианте выполнения подвижная платформа 12 может включать в себя множество компонентов 60 управления движением. Компонент 60 управления движением может включать в себя вал и направляющую 62 движения, имеющую такие размеры и выполненную так, чтобы прилегать или скользить вдоль боковой стенки 51 корпуса 50 для ограничения диапазона приведения в действие площадки в общем вертикальной осью (например, вдоль оси 45 на Фиг. 3). Направляющая 62 движения может быть соединена с валом 61 через соединитель 64. Дополнительно, Компонент 60 управления движением может включать в себя один или более буферов или амортизаторов 68. Размер и форма направляющей 62 движения и/или боковых стенок 51 могут образовывать направляющий путь приведения в действие площадки. Например, изогнутая направляющая 62 движения, которая проходит по изогнутой боковой стенке 51, может образовывать изогнутый направляющий путь приведения в действие. Подобным образом, если направляющая 62 движения образует прямую линию, которая проходит по прямой боковой стенке 51, направляющий путь может быть прямым или вдоль оси. Ось может быть ортогональной или наклонной относительно пути 30. Дополнительно, каждая отдельная подвижная платформа 12 может иметь одинаковые или различные направляющие пути относительно друг друга. В некоторых вариантах выполнения подвижные платформы 12 с различными направляющими путями могут увеличивать сложность схем приведения в действие.
Определенные компоненты подвижной платформы 12 могут быть непосредственно соединены с площадкой 40 так, что приведение в действие площадки 40 приводит к соответствующему перемещению присоединенных компонентов. Например, исполнительный механизм 58 может быть соединен с площадкой 40 через вал 69 или другой соединитель. При приведении в действие электродвигателя вал 69 перемещается в вертикальном направлении, что, в свою очередь, вызывает перемещение площадки 40 относительно неподвижного корпуса 50. В свою очередь, перемещение площадки 40 может растягивать камеру или пружину противовеса 56 и может вызывать перемещение одной или более направляющих движения относительно боковых стенок 51.
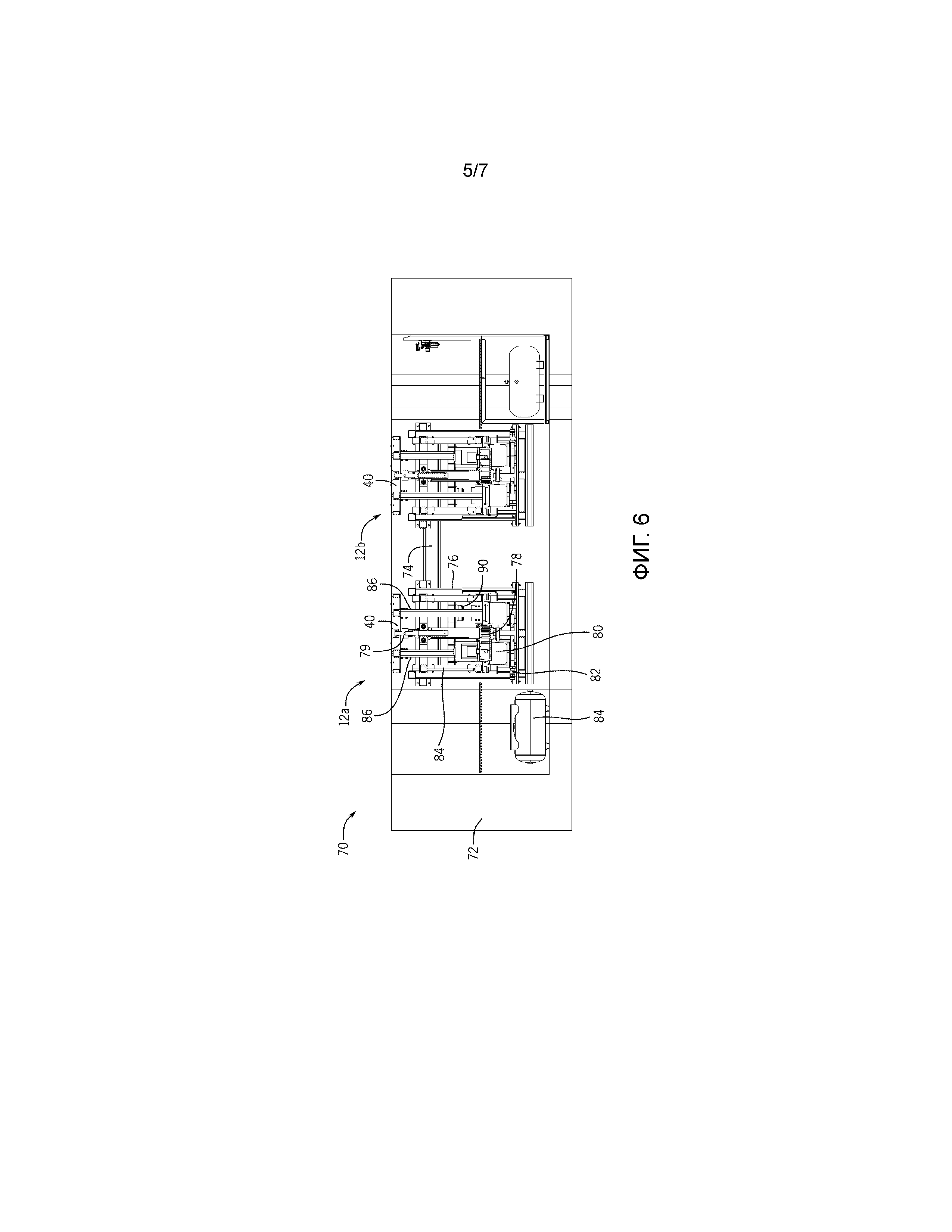
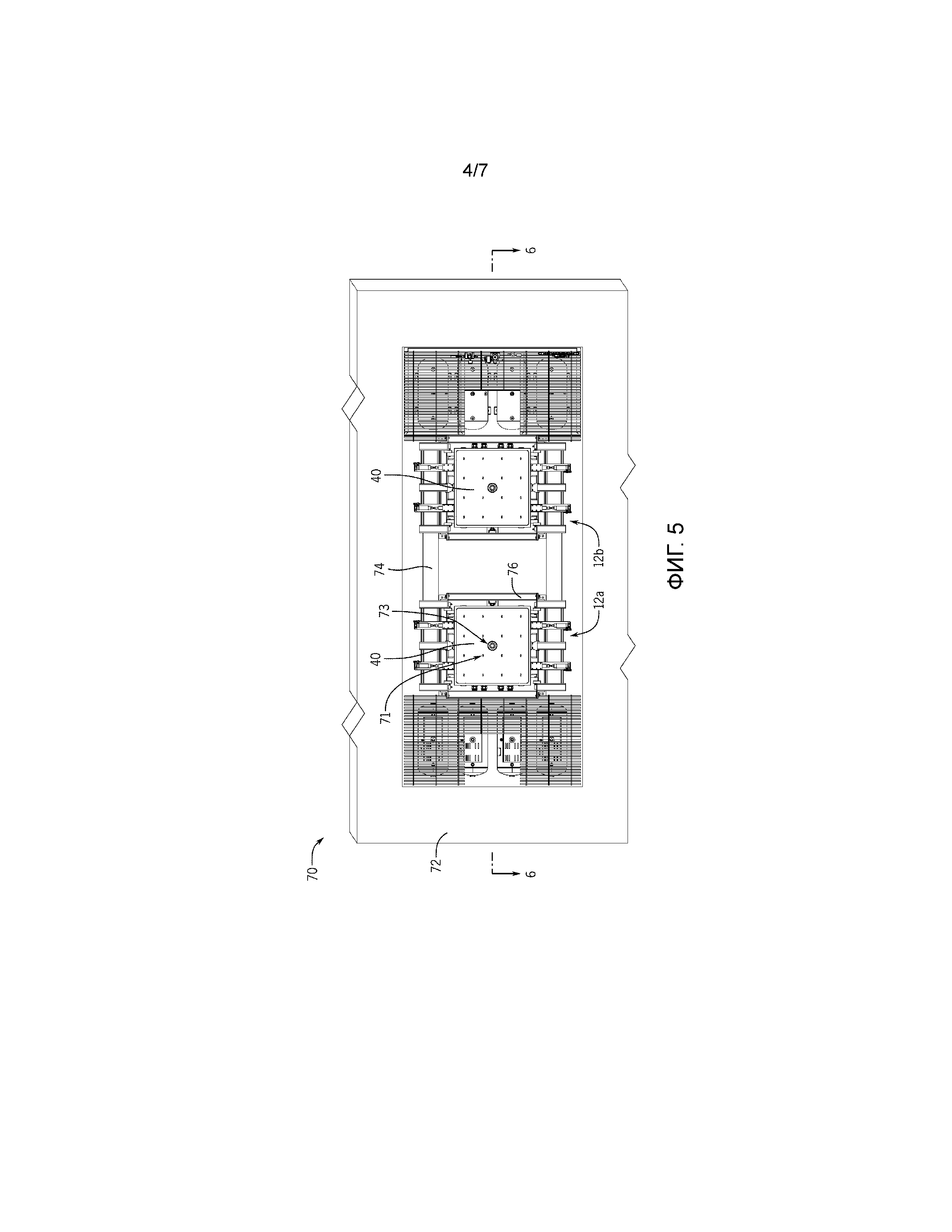
Хотя каждая подвижная платформа 12 может управляться независимо, в некоторых вариантах выполнения система 10 может включать в себя внешние устройства, которые включают в себя дополнительные связанные компоненты для облегчения приведения в действие подвижной платформы, и которые могут включать в себя одну или более подвижных платформ 12. Фиг. 5 представляет собой вид сверху устройства 70, которое размещено около подвижных платформ 12a и 12b. Устройство может иметь размеры и форму для модульной вставки в соответствующее место в пути или пути транспортного средство и может позволять доступ для ремонта или обслуживания. Верхние поверхности подвижных площадок 40 могут включать в себя датчики 73 для определения того, правильно ли размещено транспортное средство, чтобы можно было инициировать движение. Дополнительно, верхние поверхности могут включать в себя захват 71 или другие элементы для облегчения выравнивания транспортного средства на площадках 40. Устройство 70 включает в себя внешнюю оболочку 72 и распорку 74, с которой соединены корпусы 76 кареток подвижных платформ 12. Как показано, подвижные платформы 12 и их соответствующие площадки 40 находятся в пределах одного устройства 70, но разнесены друг от друга.
Фиг. 6 представляет собой вид в поперечном сечении устройства на Фиг. 5. В изображенном варианте выполнения исполнительный механизм 78 представляет собой электрический исполнительный механизм, соединенный с площадкой 40 через соединитель 79. Каждая подвижная платформа 12 включает в себя две пружины 80 с текучей средой, которые служат в качестве противовеса. Давление в пружинах 80 с текучей средой обеспечено одним или более источниками 84 текучей среды, соединенными по текучей среде с пружинами 80 с текучей средой через соединитель 82 текучей среды, и которые обеспечивают текучую среду (например, воздух, воду, текучие среды демпфирования движения). Источники 84 текучей среды находятся в пределах оболочки 72 и в вариантах выполнения настоящих методик могут быть размещены в пределах или снаружи корпуса 76. Пружины 80 с текучей средой соединены с площадкой 40 через валы 86 так, что приведение в действие площадки 40 приводит к изменению давления в пружинах 80 с текучей средой, когда объем пружины с текучей средой увеличивается за счет активного растяжения. В некоторых вариантах выполнения давление пружины с текучей средой в различных положениях приведения в действие может регулироваться для поддержания желаемого противовеса. Во время приведения в действие один или более боковых рельсов 84 могут скользить по и относительно корпуса 76. Альтернативно, конструкция, соединенная с исполнительным механизмом 78 и пружинами 80 с текучей средой, может скользить вверх и вниз по боковым рельсам 84 во время приведения в действие. Независимо от механизма приведения в действие боковые рельсы 84 могут служить для управления движением приведения в действие в общем в вертикальном направлении. Следует понимать, что в зависимости от конфигурации корпуса 76 и компонентов управления движением направление приведения в действие может управляться в не вертикальном направлении. Например, площадка 40 может быть приведена в действие под углом, что может быть уместным, если путь транспортного средства наклонен или изогнут.
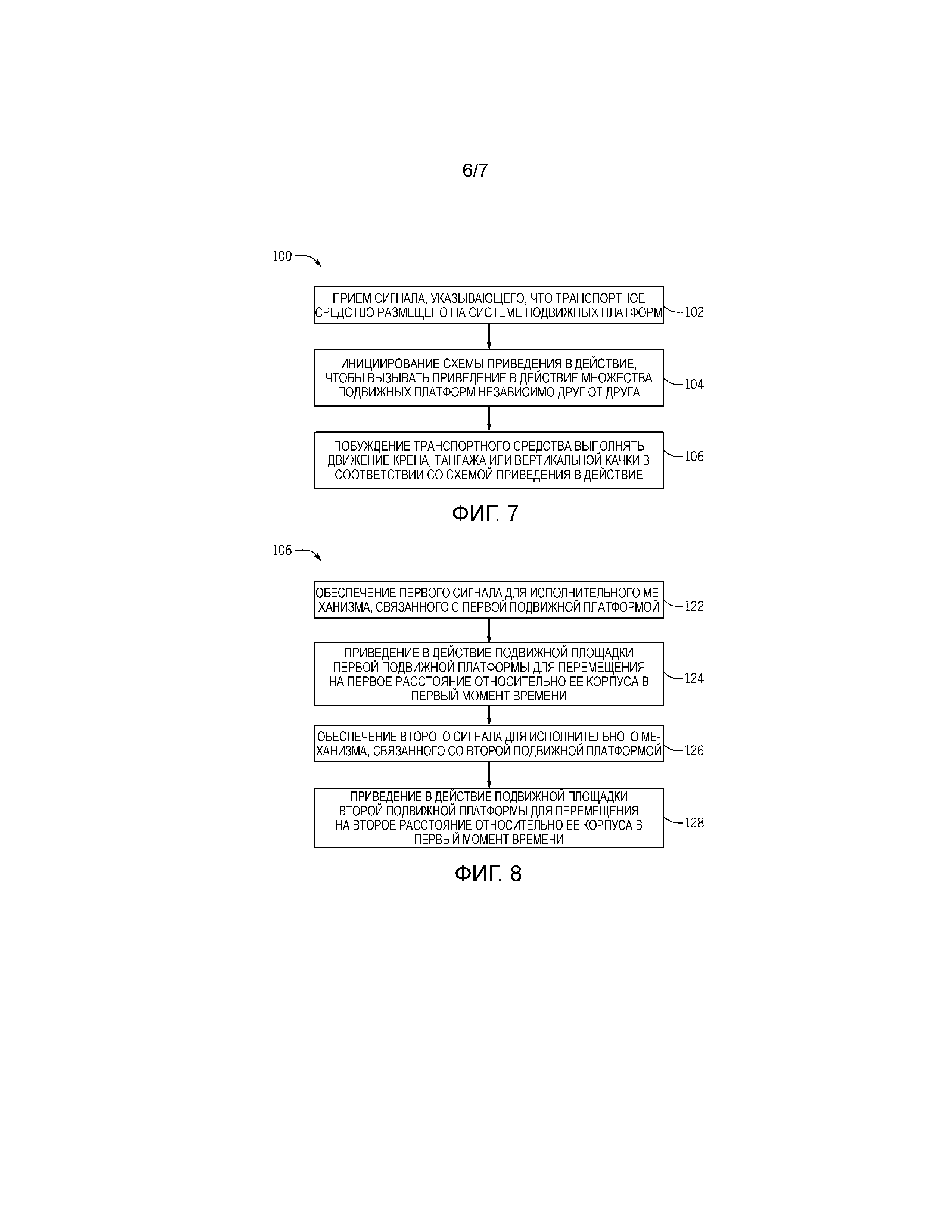
Фиг. 7 представляет собой блок-схему способа 100 использования системы 10 подвижных платформ совместно с транспортным средством (например, с транспортным средством 26, показанным на Фиг. 1). Способ 100 включает в себя этап, на котором принимают (например, в контроллере) указание того, что транспортное средство размещено соответственно на подвижных платформах 12 системы 10 подвижных платформ. Например, размещение может быть указано с помощью датчиков положения на транспортном средстве, датчиков давления на транспортном средстве и/или подвижных платформах или с помощью камер или оптических датчиков. Подходящее размещение может включать в себя выравнивание колес транспортного средства с подвижными платформами 12. Датчики обеспечивают сигнал, который принимается контроллером (блок 102), который, в свою очередь, инициирует схему приведения в действие, чтобы вызывать приведение в действие множества подвижных платформ независимо друг от друга (блок 104). Схема приведения в действие может включать в себя одну или более конфигураций приведения в действие (например, такую как конфигурация 38 приведения в действие на Фиг. 2). Если схема приведения в действие включает в себя множество конфигураций приведения в действие, работающих последовательно, схема приведения в действие также может включать в себя информацию о синхронизации для перехода между такими конфигурациями. То есть схема может поддерживать конкретную конфигурацию в течение заданного количества времени или может указывать скорость приведения в действие для усиления определенного типа движения. В одном варианте выполнения память 22 контроллера 16 может хранить множество схем приведения в действие, которые генерируют различные типы перемещения, такие как крен, тангаж, вертикальная качка или любое их сочетание. Схема приведения в действие может быть установлена таким образом, что прием сигнала приводит к инициации конкретной схемы, или схема приведения в действие может быть выбрана на основе других факторов (например, ввода пассажира, обновленных параметров аттракциона для катания) таким образом, что конкретная схема выбирается из группы схем приведения в действие и выполняется под управлением процессора. Соответственно, выполнение схемы приведения в действие вызывает крен, тангаж или вертикальную качку транспортного средства (блок 106) в соответствии с инструкциями, обеспечиваемыми контроллером 16. Дополнительно, могут быть сгенерированы другие типы перемещения. В одном варианте выполнения приведение в действие площадок 40 под различными углами, вдоль различных кривых или путей (например, с помощью направляющих путей приведения в действие) может приводить к одному или более из движения рыскания, продольного перемещения или поперечного перемещения.
Фиг. 8 представляет собой блок-схему конкретного варианта выполнения побуждения транспортного средства к тангажу, крену или вертикальной качке в соответствии со схемой приведения в действие (блок 106 на Фиг. 7), которая может быть компьютерной программой, выполняемой процессором 20, соединенным с контроллером 16. Процессор может обеспечивать первый сигнал для исполнительного механизма, связанного с первой подвижной платформой (блок 122), что, в свою очередь, приводит к приведению в действие подвижной площадки первой подвижной платформы для перемещения на первое расстояние относительно ее корпуса в первый момент времени (блок 124). Процессор также может обеспечивать второй сигнал для исполнительного механизма, связанного со второй подвижной платформой (блок 126), что, в свою очередь, приводит к приведению в действие подвижной площадки второй подвижной платформы для перемещения на второе расстояние относительно ее корпуса в первый момент времени (блок 128). В конкретных вариантах выполнения процессор может обеспечивать третий, четвертый, пятый и т.д. сигналы в первый момент времени для соответствующих третей, четвертой, пятой и т.д. подвижных платформ в зависимости от конкретной конфигурации системы 10. Расстояния перемещения могут быть определены контроллером в соответствии с желаемой схемой приведения в действие. Например, если перемещение в качестве части схемы перемещения связано с конфигурацией приведения в действие, контроллер обеспечивает сигналы для всех подвижных платформ для перемещения их соответственных площадок в определенные положения в определенный момент времени. Схема также может включать в себя переход всех или некоторых из площадок подвижных платформ в другое место, когда продолжается выполнение схемы. Соответственно, способ 106 может включать в себя возвращение на этап 122 и/или этап 126 для обеспечения сигналов приведения в действие во второй момент времени, третий момент времени и т.д. Для определенных схем приведения в действие конкретная площадка подвижной платформы может оставаться в требуемом положении в течение конкретных периодов времени, в то время как другие площадки перемещаются. Соответственно, способ также может включать в себя этап, на котором не обеспечивают сигнал приведения в действие для поднабора подвижных платформ и при этом обеспечивают сигнал приведения в действие для другого поднабора подвижных платформ в конкретные моменты времени. Дополнительно, сигналы приведения в действие также могут быть обеспечены для дополнительных подвижных платформ в дополнительные моменты времени.
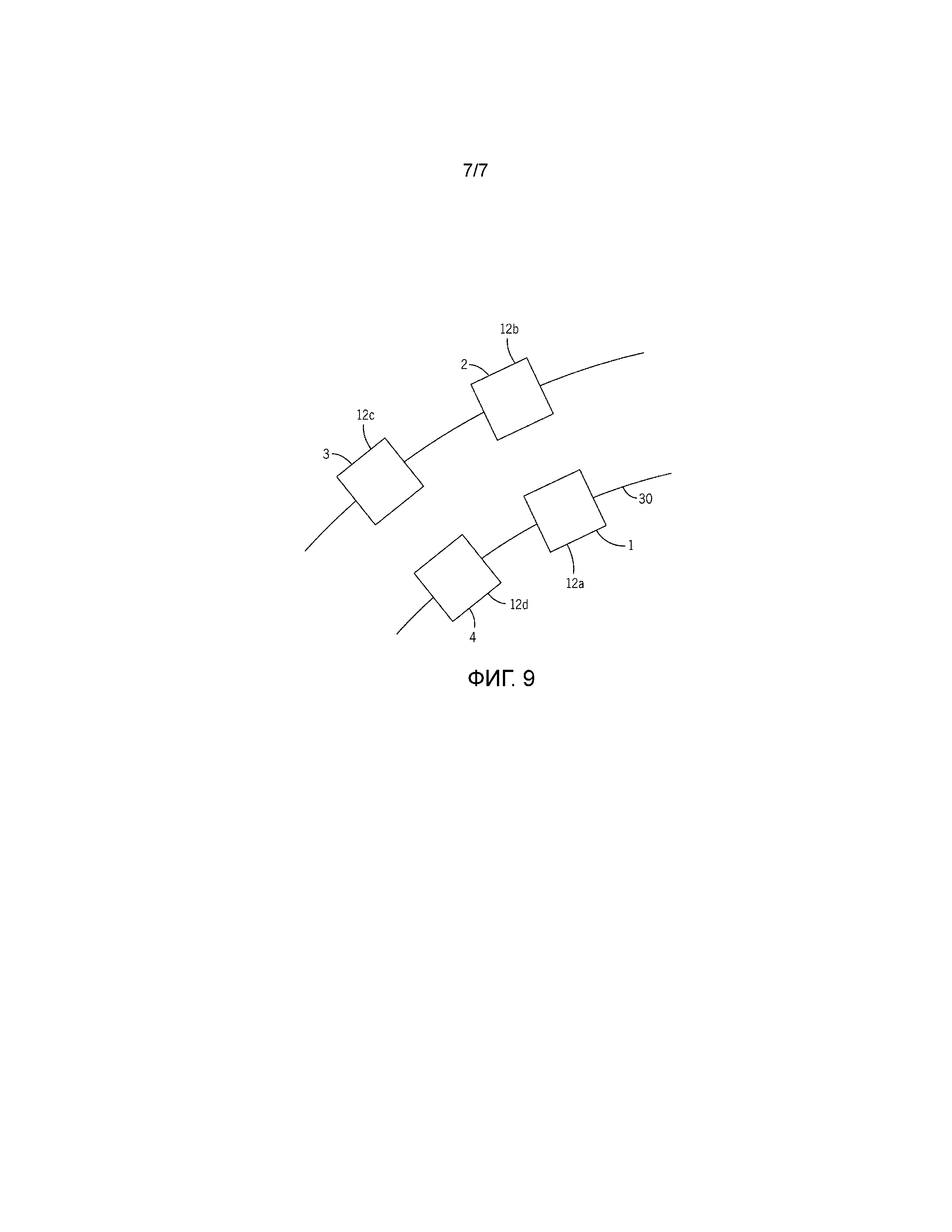
В конкретном варианте выполнения, как показано на Фиг. 9, система 10 подвижных платформ включает в себя по меньшей мере четыре подвижных платформы 12, размещенных прямолинейно на виде сверху, которые выполнены с возможностью приведения в действие в вертикальном направлении. Если подвижные платформы пронумерованы, начиная с переднего правого положения транспортного средства (например, транспортного средства 26) с четырьмя колесами, и размещены на пути так, что четыре колеса транспортного средства размещены на соответствующих подвижных платформах 1, 2, 3 и 4 (или 12a, 12b, 12c и 12d), определенные схемы приведения в действие могут быть созданы путем приведения в действие конкретных подвижных платформ по порядку. Например, для движения преимущественно по оси крена (когда направление вперед пути предполагается по оси х) приведение в действие в схеме подвижной платформы 1, поднимаемой относительно подвижной платформы 2, и/или подвижной платформы 4, поднимаемой относительно подвижной платформы 3, будет создавать движение по оси крена в одном направлении. Реверсирование схемы приведения в действие (например, 2, поднятая относительно 1, и/или 4, поднятая относительно 3) будет создавать движение по оси крена в противоположном направлении. Дополнительно, движение преимущественно по оси тангажа может быть создано путем поднятия 4 относительно 1 и/или 3 относительно 2, тогда как реверсирование схемы будет генерировать обратное движение по оси тангажа. Вертикальная качка может быть создана путем движения вверх и вниз, создаваемого одновременным приведением в действие подвижных платформ 1, 2 3 и 4 для перемещения транспортного средства вверх или вниз. Дополнительно, движение вертикальной качки может включать в себя наложенные движения тангажа или крена. Например, четыре подвижных платформы могут быть перемещены по существу одновременно в направлении вверх или вниз с подвижной платформой 1, перемещаемой в более высокое конечное положение, чем подвижная платформа 2, для создания вертикальной качки с наложенным движением крена. Подобным образом, одновременное перемещение четырех площадок с подвижной платформой 4, перемещаемой в другое положение относительно подвижной платформы 1, может приводить к вертикальной качке с наложенным движением тангажа. Также предполагаются другие сочетания.
Как обеспечено в данном документе, определенные элементы раскрытых вариантов выполнения могут быть соединены друг с другом. Такое соединение может быть коммуникативным соединением, физическим соединением, электрическим соединением и/или механическим соединением. Например, соединенные элементы могут связываться друг с другом для обмена данными или информацией. В другом варианте выполнения соединенные элементы могут находиться в прямом физическом контакте или могут быть соединены вместе через промежуточные компоненты. В еще одном варианте выполнения соединенные элементы могут быть расположены на другом элементе. В еще одном варианте выполнения элемент может опираться на элемент, с которым он соединен. Соединение, как обеспечено в настоящем документе, может быть постоянным или обратимым.
Хотя в данном документе были проиллюстрированы и описаны только определенные признаки, многие модификации и изменения будут очевидны специалиста в области техники. В связи с этим следует понимать, что приложенная формула изобретения предназначена для охвата всех таких модификаций и изменений, которые находятся в пределах истинной сущности изобретения. Хотя определенные раскрытые варианты выполнения были раскрыты применительно к паркам развлечений или тематическим паркам, следует понимать, что определенные варианты выполнения также могут относиться к другим прогулочным местам, включая городские парки, государственные парки, музеи и т.д. Дополнительно, следует понимать, что определенные элементы раскрытых вариантов выполнения могут быть объединены или заменены друг другом.
Устройство и способ стрелочного перевода
Система управления положением
Способ и система камер хранения
Устройство, система и способ формирования изображения
Основанный на движении аттракцион с узлом отображения изображения
Способ и устройство преобразования изображения
Шарнирно соединенная водная горка
Система и способ генерирования волн в различных направлениях
Система и способ для обеспечения визуальных эффектов пляжа аквапарка
Перемещающаяся демонстрационная дверь
Устройство и способ стрелочного перевода
Основанный на движении аттракцион с узлом отображения изображения
Улучшенная интерактивность в среде парка развлечений с использованием пассивных отслеживающих элементов
Оптическое отслеживание для управления элементами пиротехнического шоу
Система отслеживания элемента в парке развлечений
Системы и способы формирования изображений с дополненной и виртуальной реальностью
Система и способ отслеживания для использования при наблюдении за оборудованием парка развлечений
Система и способ для отслеживания пассивной палочки и активации эффекта на основе обнаруженной траектории палочки
Система отслеживания и управления транспортным средством аттракциона для катания с использованием пассивных отслеживающих элементов
Система создания огненного эффекта (варианты) и способ создания огненного эффекта

