Результат интеллектуальной деятельности: СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к сельскохозяйственному транспортному средству, в частности, к тягачу или уборочной машине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Известно оснащение гусеничными ходовыми механизмами сельскохозяйственных транспортных средств, таких как тягачи или уборочные машины. Вследствие своей большей опорной поверхности по сравнению с колесами гусеничные ходовые механизмы развивают более высокое тяговое усилие при меньшем проскальзывании и приводят к меньшему уплотнению почвы. Конструктивные виды предлагаемых на рынке гусеничных тягачей можно подразделить на шарнирно-сочлененные тягачи на четырех гусеницах, двухгусеничные тягачи и тягачи по полугусеничном ходу.
Шарнирно-сочлененные тягачи на четырех гусеницах обычно относятся к машинам класса высокой мощности и уже вследствие своего веса и размеров менее пригодны для задач транспортировки или легких работ.
Двухгусеничные тягачи содержат на каждой стороне транспортного средства, - по отношению к его продольной оси, - гусеничный ходовой механизм для опоры транспортного средства на основание (полностью гусеничный ход). В большинстве случаев гусеничные ходовые механизмы могут поворачиваться относительно рамы транспортного средства на небольшой угол вокруг поперечной оси машины, при этом рама может быть выполнена идентичной раме соответствующего колесного тягача. В этом отношении можно сделать ссылку на патентный документ WO 1998/40266. Двухгусеничные тягачи должны иметь продольный наклон или дифферент на переднюю часть, чтобы при работе под тяговой нагрузкой обеспечивать равномерное распределение давления под гусеничными ходовыми механизмами. Равномерное распределение давления желательно в особенности при тяговых работах, так как только при этом может быть полностью реализован потенциал в отношении передачи приводного усилия и сохранения почвы. Однако в этом необходимом дифференте на переднюю часть заложен недостаток обычных двухгусеничных тягачей. Для достижения указанных преимуществ требуется точная оценка тягового сопротивления навесного рабочего оборудования. Однако поскольку на практике тяговое сопротивление может резко колебаться для различных видов навесного рабочего оборудования и/или в зависимости от рабочих условий (например, свойств почвы, глубины обработки, скорости движения и других), пользователь должен компенсировать это путем соответствующей передней балластировки перед началом движения. При колебаниях тягового усилия в ходе эксплуатации правильная балластировка уже невозможна. Когда транспортное средство с дифферентом на переднюю часть движется по асфальтированным дорогам, грунтозацепы гусеничной ленты, - как правило, изготовленные из резины, - при заходе в выемки резко тормозятся и обжимаются, что приводит к интенсивному износу и связанными с ним высокими эксплуатационными затратами.
Полугусеничные тягачи в своем большинстве представляют собой переоборудованные колесные машины, в которых, например, задние колеса заменены гусеничными ходовыми механизмами. Вследствие измененного передаточного отношения резко снижается максимальная скорость движения. В тягачах с приводом на все колеса ввиду жесткого передаточного отношения между передней и задней ходовыми осями спереди также должны монтироваться гусеничные ходовые механизмы. В этом отношении можно сделать ссылку на патентный документ US 2007/0261898 A1. Помимо изменения характеристики подрессоривания приходится мириться со снижением эксплуатационной прочности.
Из патентного документа WO 2013/113484 A2 известна другая концепция полугусеничного транспортного средства. Здесь (задний) гусеничный ходовой механизм служит приводным компонентом. Передняя ходовая ось (называемая колесной ходовой осью) служит только для восприятия вертикальных сил и в качестве опорного компонента рулевого управления. В этом транспортном средстве с двумя ходовыми осями гусеничный ходовой механизм имеет балансирную подвеску и дополнен внутренней конечной передачей. Поэтому генерирование приводного усилия приводит к подъему гусениц. Это устраняется посредством управляемого противодействующего давления, создаваемого гидроцилиндром. Передняя ходовая ось разгружается от нагрузки, с одной стороны, при приложении тягового усилия и, с другой стороны, усилием гидроцилиндра. Это создает возможность выдерживания постоянного распределения давления под гусеничным ходовым механизмом при работе на поле. В противоположность этому при дорожном движении гидравлическое усилие может быть изменено на обратное, так что разгружается передний направляющий каток гусеничного ходового механизма. Соответственно, передняя (колесная) ходовая ось воспринимает более значительную часть нагрузки. Это обеспечивает более мягкое прохождение грунтозацепов и снижает износ. По сравнению с классическим двухгусеничным тягачом данная концепция дает преимущества при движении как по податливому, так и по твердому основанию. Дополнительно передняя ходовая ось снижает продольную качку и тем самым повышает комфорт движения.
Описанное в патентном документе WO 2013/113484 A2 транспортное средство оснащено неприводной передней ходовой осью, и здесь также недостаток состоит в необходимости точной балластировки. Для обеспечения эффективности тяговой мощности была бы идеальной нулевая нагрузка на переднюю ходовую ось. Однако в этом случае существует опасность того, что транспортное средство может наклоняться назад, поэтому передняя ходовая ось должна оставаться нагруженной хотя бы в небольшой степени. Эта нагрузка не может использоваться для передачи тягового усилия и при слишком малых шинах может уплотнять почву. Можно было бы сделать переднюю ходовую ось также приводной. Однако вследствие разных тяговых характеристик колеса и гусеницы настройка требуемой для этого координации была бы слишком сложной, тем более, что сельскохозяйственные тягачи, как правило, не имеют продольного дифференциала.
Помимо гидравлического элемента в гусеничном ходовом механизме транспортное средство по WO 2013/113484 A2 снабжено осью полного рулевого управления. Для обеспечения низкой нагрузки на переднюю ходовую ось транспортное средство снабжено дифференциальным управлением поворотом задней ходовой оси, которое должно быть синхронизировано с поворотом передней ходовой оси. В указанных аспектах это обусловливает высокую общую сложность транспортного средства.
Раскрытие изобретения
Задачей настоящего изобретения является создание транспортного средства указанного типа, которое при незначительных конструктивных затратах обеспечивает возможность равномерной опоры на большей части длины ходового механизма при различной балластировке и различных тяговых усилиях, при этом достигается также сниженный износ гусеничной ленты при дорожном движении и повышение комфорта езды.
Решение поставленной задачи достигается в транспортном средстве, обладающем признаками по пункту 1 формулы изобретения. Оно отличается тем, что все катки гусеничного ходового механизма подпружинены относительно остова ходового механизма посредством того, что с одним катком или с группой катков связан упругий элемент с подаваемой в него текучей средой для подпружинивания относительно остова ходового механизма.
За счет того, что в соответствии с изобретением предусмотрена упругая подвеска всех катков относительно остова ходового механизма, вес транспортного средства может восприниматься равномерно и передаваться на основание в широкой области, то есть по всей рабочей поверхности гусеничного ходового механизма, даже при различной балластировке и различных тяговых усилиях. Таким образом, по сравнению с классическими двухгусеничными тягачами может быть значительно снижена опасность уплотнения почвы вследствие неточной балластировки и повышена возможность передачи тягового усилия. За счет того, что в соответствии с изобретением с одним катком или с группой катков связан упругий элемент с подаваемой в него текучей средой для подпружинивания относительно остова ходового механизма, может оказываться целенаправленное влияние на упругую подвеску транспортного средства. По сравнению со стальными или резиновыми упругими элементами, характеристики которых всегда должны соответствовать условиям максимальной нагрузки, содержащие текучую среду упругие элементы дают преимущества в более мягкой адаптации к нагрузке. Кроме того, их демпфирующая способность может изменяться в более широком диапазоне. Предпочтительно при этом используются упругие элементы типа “Hydrop”, то есть гидропневматические упругие элементы, предпочтительно с регулируемым уровнем. Использование упругих элементов с подаваемой в них текучей средой позволяет выгодным образом влиять на опорные силы, чтобы по мере надобности целенаправленно разгружать часть гусеничного ходового механизма или увеличивать ее нагрузку. В результате, например, при дорожном движении достигается сниженный износ грунтозацепов, а при тяговых работах достигается равномерное распределение давления, что способствует сохранению почвы и повышает эффективность тяги. Кроме того, такая упругая подвеска катков обеспечивает повышение комфорта езды, поскольку возможна адаптация к нагрузке и общее изменение характеристики упругой подвески. Кроме того, за счет относительно большой длины гусеничного ходового механизма (в полностью гусеничном исполнении) снижается подверженность транспортного средства продольной качке.
Возможны различные варианты конструктивного выполнения транспортного средства. Согласно предпочтительному решению по развитию изобретения остов ходового механизма смонтирован на конструкции транспортного средства. В этом случае остов ходового механизма является отдельным конструктивным узлом, на котором шарнирно укреплены относящиеся к нему направляющие и опорные катки гусеничного ходового механизма и который смонтирован сбоку на конструкции транспортного средства, например, с помощью фланцевого крепления.
Согласно альтернативному выполнению остов ходового механизма является неотъемлемой частью конструкции транспортного средства. В этом случае остов ходового механизма выполнен не в виде отдельного конструктивного узла, а является частью конструкции транспортного средства. При этом направляющие и опорные катки шарнирно укреплены на конструкции транспортного средства, например, с помощью валов и/или осей, которые имеют опоры в конструкции и выступают от нее в боковую сторону.
В широком аспекте, в частности, независимо от выполнения конструкции транспортного средства и остова ходового механизма в решении по дальнейшему развитию изобретения предусмотрены средства для распределения исходящего от транспортного средства опорного давления на отдельные упругие элементы и/или на одну и/или большее число групп упругих элементов. В принципе это могут быть любые средства, с помощью которых может распределяться опорное давление, в частности, вызванное силой тяжести транспортного средства.
Предпочтительно транспортное средство содержит систему текучей среды для снабжения упругих элементов, в которой определенные, в частности, выбираемые в зависимости от ситуации упругие элементы могут быть совместно подключены в отдельный контур текучей среды (или постоянно подключены) для образования блока упругой подвески. За счет совместного подключения нескольких упругих элементов в один, - замкнутый, - контур текучей среды во всем образованном блоке упругой подвески создается одинаковое давление, так что благоприятным образом автоматически обеспечивается равномерное распределение нагрузки на соответствующие упругие элементы или относящиеся к ним катки.
Возможны различные исполнения системы. Предпочтительно образованный общим контуром текучей среды блок упругой подвески имеет точку маятникового качания, которая образует виртуальную ходовую ось транспортного средства. В этом случае гидропневматическая подвеска моделирует ходовую ось с качанием вокруг этой точки маятникового качания.
Для оказания влияния на распределение нагрузки транспортного средства далее предпочтительно, по меньшей мере, один упругий элемент гусеничного ходового механизма может быть соотнесен с передним блоком упругой подвески для образования виртуальной передней ходовой оси, и, по меньшей мере, один упругий элемент этого же гусеничного ходового механизма может быть соотнесен с задним блоком упругой подвески для образования виртуальной задней ходовой оси.
Описанная концепция упругой подвески может быть реализована во множестве вариантов. В предпочтительном решении по развитию изобретения предусмотрено, что, по меньшей мере, один опорный каток в зависимости от рабочих параметров транспортного средства, посредством подключения относящегося к нему упругого элемента может быть подключен к соответствующему контуру текучей среды либо виртуальной передней ходовой оси, либо виртуальной задней ходовой оси. За счет изменяемого соотнесения (по меньшей мере, одного) опорного катка либо с передним, либо задним блоком упругой подвески путем выравнивания давления может быть уменьшен возможный перепад давления между ходовыми осями. В качестве привлекаемых при этом рабочих параметров могут служить, например: давление текучей среды в упругих элементах передней или задней ходовых осей и/или в опорных катков, скорость движения транспортного средства. Предпочтительно предусмотрен гистерезис, чтобы предотвращать постоянные переключения при небольших колебаниях вокруг предельной величины. Далее, предпочтительно с отдельными упругими элементами связаны датчики давления, причем соотнесение опорного катка производится в зависимости от зарегистрированного состояния давления в одном или нескольких упругих элементах.
Предпочтительно в общем случае транспортное средство содержит средства для влияния на распределение давления между передними упругими элементами и задними упругими элементами гусеничного ходового механизма в зависимости от зарегистрированных рабочих параметров транспортного средства, в частности, таких как тяговое усилие. Таким образом, опорное давление в пределах гусеничного ходового механизма может настраиваться в зависимости от эксплуатационного режима транспортного средства, чтобы повысить сцепление или тяговое усилие или для бережного прохода по почве.
Технически это может осуществляться посредством того, что транспортное средство содержит средства для влияния на давление текучей среды в отдельных контурах текучей среды, в частности, в контуре текучей среды, относящемся к виртуальной передней ходовой оси, и в контуре текучей среды, относящемся к виртуальной задней ходовой оси, и/или для влияния на давление текучей среды в пределах одного контура текучей среды, предпочтительно в зависимости от зарегистрированных рабочих параметров транспортного средства. В качестве примера рабочими параметрами могут служить: тяговое усилие транспортного средства, давление текучей среды в уплотнительных элементах передней или задней ходовой оси и/или опорных катков, скорость движения транспортного средства.
Для снижения износа гусеничной ленты предпочтительно транспортное средство может эксплуатироваться в режиме дорожного движения, в котором в упругие элементы виртуальной передней ходовой оси подается пониженное давление по сравнению с режимом движения на поле.
Эффективность и сцепление транспортного средства при выполнении работ, в частности, при тяговых работах, могут быть повышены за счет того, что в упругие элементы виртуальной передней ходовой оси может подаваться давление, зависящее от развиваемого транспортным средством тягового усилия, в частности, с той целью, чтобы соответственно снизить сумму действующих на гусеничный ходовой механизм моментов, предпочтительно привести ее к нулю.
За счет того, что в задний упругий элемент гусеничного ходового механизма посредством индивидуального управления может подаваться повышенное давление, в случае особенно высокого тягового усилия может предотвращаться подъем гусеничного ходового механизма.
Обоснование этой функции состоит в том, что при подаче давления в задний упругий элемент задняя точка маятникового качания гусеничного ходового механизма смещается дальше назад, так что даже при высоком тяговом усилии гусеничный ходовой механизм сохраняет положение прилегания к основанию.
В конструктивно предпочтительном выполнении предусмотрено, что, по меньшей мере, один или несколько катков шарнирно соединены с остовом ходового механизма посредством шарнирно-рычажной системы.
При этом шарнирно-рычажная система может состоять из одного или нескольких связанных друг с другом несущих элементов и служит для шарнирного присоединения одного или нескольких катков.
Согласно предпочтительному решению по развитию изобретения передний направляющий каток и расположенный за ним вдоль продольной оси транспортного средства опорный каток соединены с остовом ходового механизма посредством общей опорной системы, причем с опорной системой связан упругий элемент для ее упругой подвески относительно остова ходового механизма. Эта опорная система образует виртуальную переднюю ходовую ось. Предпочтительно она может быть выполнена таким образом, что содержит шарнирно прикрепленный к остову ходового механизма продольный балансир и шарнирно прикрепленный к продольному балансиру рычаг, причем передний направляющий каток установлен на рычаге, а опорный каток установлен на продольном балансире, при этом с рычагом связано натяжное устройство, предпочтительно в виде цилиндра с подаваемой в него текучей средой для обеспечения натяжения гусеничной ленты. Следует отметить, что для образования виртуальной передней ходовой оси возможны различные, в том числе отличные от этого варианты выполнения.
Краткий перечень чертежей
Далее изобретение будет подробно пояснено со ссылками на приложенные чертежи. При этом будут ясны также другие преимущества и особенности изобретения. На чертежах:
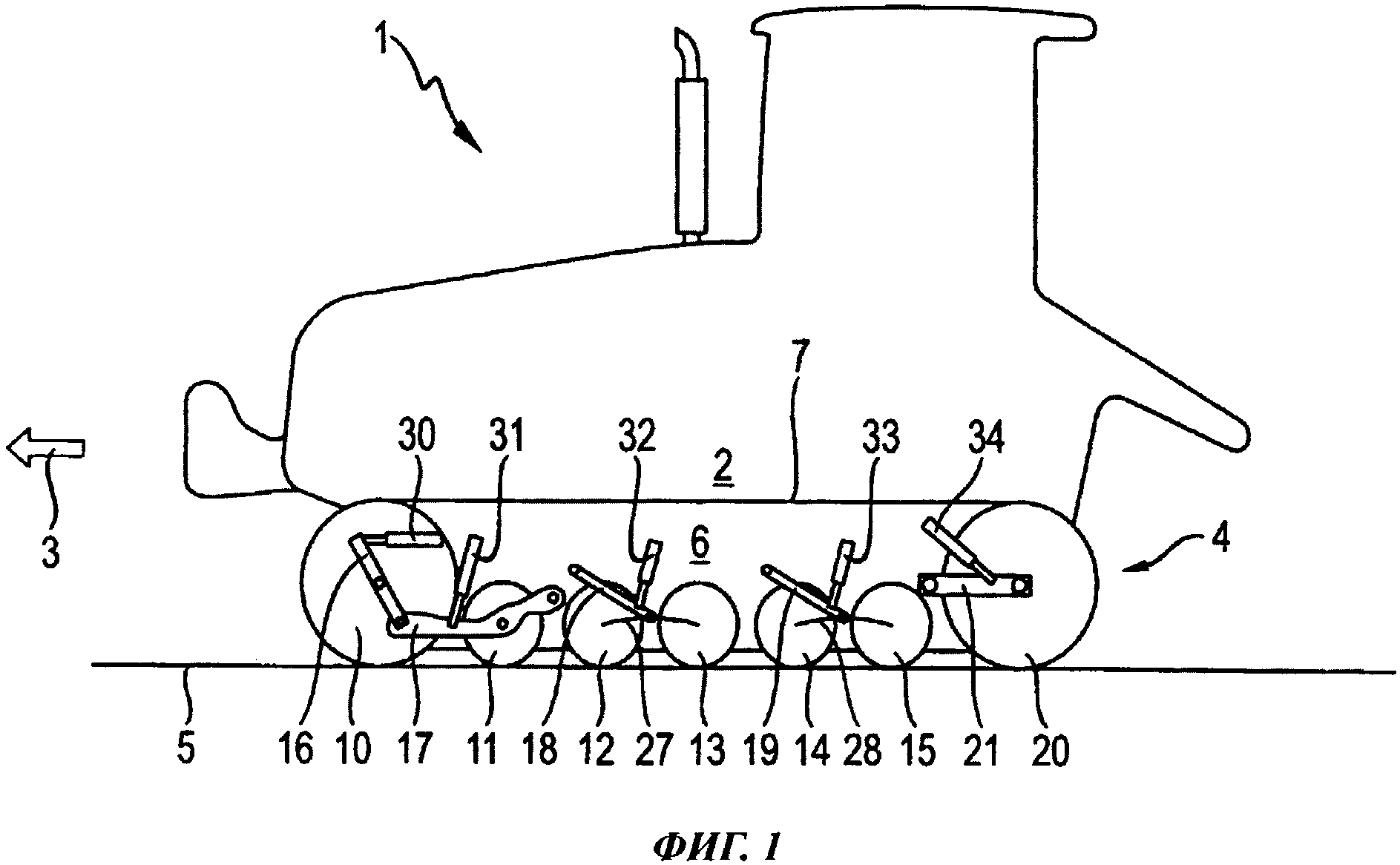
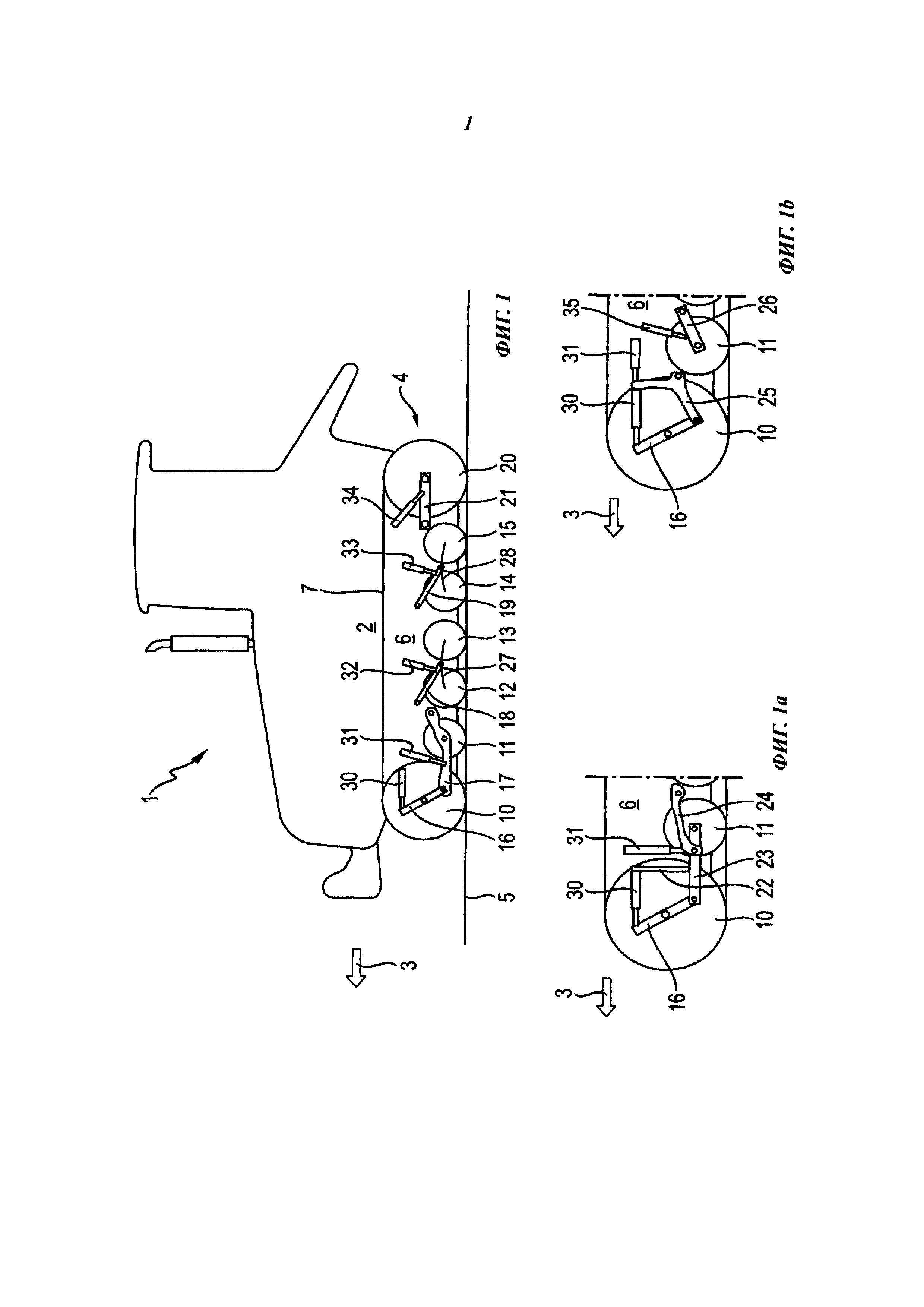
фиг. 1 схематично изображает на виде сбоку сельскохозяйственный тягач с гусеничным ходовым механизмом,
фиг. 1a изображает переднюю часть гусеничного ходового механизма, который по сравнению с показанным на фиг. 1 тягачом имеет измененную шарнирно-рычажную систему навески передних катков,
фиг. 1b изображает переднюю часть гусеничного ходового механизма, который по сравнению с показанным на фиг. 1 тягачом имеет другую измененную шарнирно-рычажную систему навески передних катков,
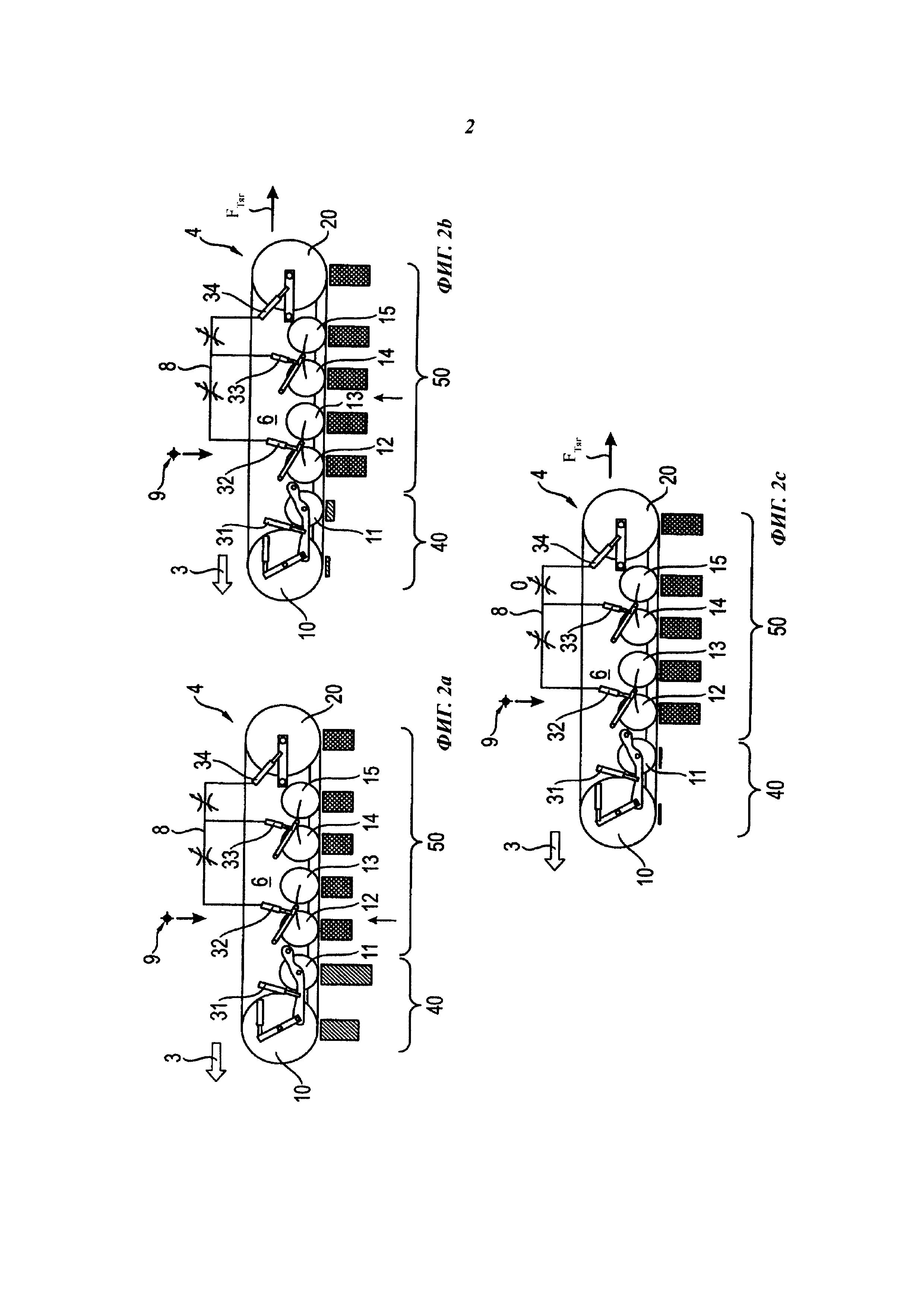
фиг. 2a изображает гусеничный ходовой механизм показанного на фиг. 1 тягача с внутренним распределением в ходовом механизме,
фиг. 2b изображает гусеничный ходовой механизм показанного на фиг.1 тягача при нормальной тяговой нагрузке,
фиг. 2c изображает гусеничный ходовой механизм показанного на фиг. 1 тягача при перегрузке,
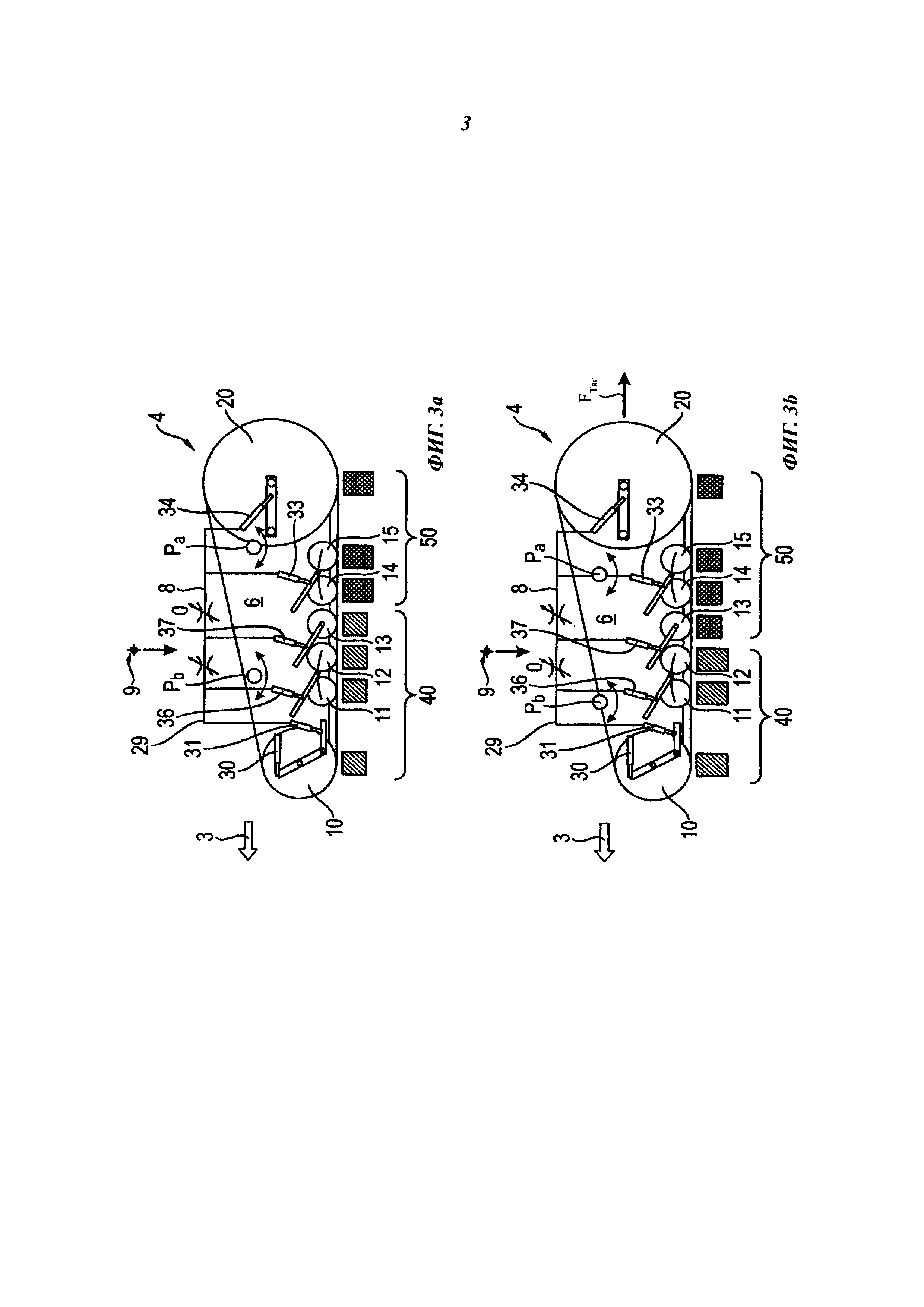
фиг. 3a изображает гусеничный ходовой механизм тягача с измененным внутренним распределением при дорожном движении,
фиг. 3b изображает гусеничный ходовой механизм тягача с измененным внутренним распределением при движении на поле.
Осуществление изобретения
На фиг. 1 схематично показан на виде сбоку сельскохозяйственный тягач 1 в соответствии с изобретением при движении по основанию 5. Тягач 1 выполнен в соответствии с концепцией полного гусеничного хода и имеет конструкцию с рамой 2 транспортного средства. На раме 2 транспортного средства с двух сторон относительно продольной оси 3 транспортного средства (показанной стрелкой), то есть слева и справа, смонтированы гусеничные ходовые механизмы 4, причем тягач опирается на основание 5 исключительно двумя гусеничными ходовыми механизмами 4. Согласно виду сбоку по фиг. 1 виден только левый гусеничный ходовой механизм 4 по отношению к продольной оси 3. Правый гусеничный ходовой механизм 4 расположен соответственно на правой стороне рамы 2 транспортного средства. Поскольку два гусеничных ходовых механизма имеют одинаковую конструкцию, последующее описание левого гусеничного ходового механизма 4 действительно также для правого гусеничного ходового механизма 4.
Для выполнения работ в соответствии с назначением, таких как работа в качестве тягача, тягач 1 известным и поэтому не показанным образом оснащен, по меньшей мере, одним соответствующим соединительным устройством, так что тягач 1 может протягивать рабочий агрегат (например, почвообрабатывающий агрегат, такой как плуг). Следует заметить, что здесь изобретение описывается на примере тягача 1, однако оно не ограничивается этим типом сельскохозяйственного транспортного средства. Альтернативно транспортным средством может быть, например, самоходная уборочная машина, такая как зерноуборочный комбайн, полевой измельчитель, тюковой пресс.
Как показано на фиг. 1 гусеничный ходовой механизм 4 тягача 1 содержит остов 6 ходового механизма. Он жестко соединен с рамой 2 транспортного средства, например, посредством фланцевого соединения. К остову 6 с помощью описанных далее звеньев шарнирно присоединены следующие компоненты: передний направляющий каток 10, задний направляющий каток 20 и несколько (здесь пять) расположенных между ними опорных катков 11, 12, 13, 14, 15. Следует отметить, что вместо показанного выполнения (с остовом 6, присоединенным к раме 2 транспортного средства) возможно выполнение остова гусеничного ходового механизма в качестве неотъемлемой части конструкции транспортного средства. В этом (не показанном) случае направляющие и опорные ролики шарнирно присоединены к конструкции транспортного средства, служащей также остовом ходового механизма.
В показанном примере выполнения по фиг. 1 бесконечная замкнутая гусеничная лента 7 в передней части гусеничного ходового механизма 4 огибает половину переднего направляющего катка 10 (то есть с охватом на 180°), а в задней части гусеничного ходового механизма 4 она огибает половину заднего направляющего катка 20 (то есть с охватом на 180°). Опорные катки 11, 12, 13, 14, 15 имеют одинаковый диаметр, причем центры вращения опорных катков 11, 12, 13, 14, 15, - в показанном состоянии, - лежат на воображаемой линии, так что все пять опорных катков 11, 12, 13, 14, 15 вместе с передним направляющим катком 10 и задним направляющим катком 20 катятся по нижнему участку гусеничной ленты 7, лежащему на основании 5. Таким образом, остов 6 ходового механизма опирается всеми семью катками 10, 11, 12, 13, 14, 15, 20 на нижний участок гусеничной ленты 7. Следует отметить, что направляющие и опорные катки могут иметь соотношения размеров, отличные от показанного примера выполнения. В частности, передний и задний направляющие катки могут быть различными по размерам. Опорные катки могут также отличаться размерами друг от друга.
Для передачи приводной мощности на гусеничный ходовой механизм 4 задний направляющий каток 20 приводится посредством (не показанной) приводной трансмиссии. Для обеспечения необходимого для надежной работы натяжения ленты для переднего направляющего катка предназначено натяжное устройство. Оно содержит силовой цилиндр 30, который опирается на остов 6 ходового механизма и через тягу может воздействовать на положение переднего направляющего катка 20, чтобы посредством приложения к гусеничной ленте 7 направленного наружу усилия (здесь конкретно направленного вперед усилия) удерживать гусеничную ленту 7 под натяжением.
Для равномерной опоры на большей части длины ходового механизма даже при различной балластировке и различных тяговых усилиях, для снижения износа гусеничной ленты при дорожном движении и в целом для повышения комфорта езды в тягаче все катки 10, 11, 12, 13, 14, 15, 20 гусеничного ходового механизма 4 подпружинены относительно остова 6 ходового механизма. Для этого для одного отдельного катка 20 или для группы катков 10, 11; 12, 13; 14, 15 предназначен определенный упругий элемент 31, 32, 33, 34, причем он является упругим элементом, с подаваемой в него текучей средой, предпочтительно гидравлическим элементом типа “Hydrop” с регулируемым уровнем, который на одном конце опирается на остов 6 ходового механизма, а на другом конце соединен с тягой, шарнирно соединенной с одним или двумя катками. По сравнению со стальными или резиновыми упругими элементами, характеристики которых всегда должны соответствовать условиям максимальной нагрузки, содержащие текучую среду упругие элементы (такие как “Hydrop”) дают преимущества в более мягкой адаптации к нагрузке. Кроме того, их демпфирующая способность может изменяться в более широком диапазоне.
Передний направляющий каток 10 установлен с возможностью вращения на удлиненном рычаге 16. Верхний конец рычага 16 соединен с цилиндром 30 натяжения ленты. Противоположный конец рычага 16 шарнирно соединен с продольным балансиром 17. Продольный балансир 17 на своем заднем конце шарнирно соединен с остовом 6 ходового механизма. Цилиндр 31, соединенный со средним участком продольного балансира 17, опирается на остов 6 ходового механизма чтобы упруго опирать продольный балансир 17 на остов 6 ходового механизма. Опорный каток 11, расположенный вдоль продольной оси 3 транспортного средства непосредственно за передним направляющим катком 10, установлен с возможностью вращения на продольном балансире 17. Таким образом, передний направляющий каток 10 и опорный каток 11 совместно подпружинены относительно остова 6 ходового механизма, причем упругость обеспечивается изменением длины цилиндра 31 (его упругим втягиванием). В отличие от него цилиндр 30 служит главным образом для поддержания требуемого натяжения ленты.
За опорным катком 11 в продольном направлении 3 транспортного средства находятся два расположенных друг за другом опорных катка 12, 13. Они шарнирно соединены с остовом 6 ходового механизма посредством конструкции, содержащей продольный балансир 18 и коромысло 27. Для этого продольный балансир на верхнем конце шарнирно соединен с остовом 6 ходового механизма, а к его противоположному концу шарнирно прикреплен центр дугообразного коромысла 27. На концах коромысла 27 установлены с возможностью вращения опорные катки 12 и 13. Соединенный с продольным балансиром 18 цилиндр 32 опирается на остов 6 ходового механизма чтобы упруго опирать на него продольный балансир 18 и соединенное с ним коромысло 27. Благодаря такой кинематике два опорных катка 12, 13 совместно подпружинены относительно остова 6 ходового механизма, причем упругость обеспечивается изменением длины цилиндра 32 (его упругим втягиванием).
Таким же образом, как описано в предыдущем абзаце, опорные катки 14, 15 шарнирно соединены с остовом 6 ходового механизма с помощью конструкции из продольного балансира 19 и коромысла 28, причем цилиндр 33 обеспечивает возможность подпружинивания. Механическая конструкция и ее действие соответствует подвеске опорных катков 12, 13, так что во избежание повторения подробное описание не приводится.
Задний направляющий каток 20 установлен относительно остова 6 ходового механизма с помощью продольного балансира 21. Передний конец продольного балансира 21 по отношению к продольной оси 3 транспортного средства шарнирно соединен с остовом 6 ходового механизма. Задний направляющий каток 20 установлен с возможностью вращения на противоположном (заднем) конце продольного балансира 21. Цилиндр 34, соединенный со средним участком продольного балансира 21, опирается на остов 6 ходового механизма чтобы упруго опирать продольный балансир 21 на остов 6 ходового механизма. Таким образом, задний направляющий каток 20 подпружинен относительно остова 6 ходового механизма, причем упругость обеспечивается изменением длины цилиндра 34 (его упругим втягиванием).
Показанная на фиг. 1 кинематическая схема гусеничного ходового механизма 4, в частности, шарнирное присоединение отдельных катков к остову 6 ходового механизма, отнесение катков к упругим элементам, число катков и т.д., может отличаться от показанного примера выполнения во множестве вариантов. В качестве примера на фиг. 1a и 1b показаны модификации шарнирного присоединения передних катков 10, 11.
Согласно варианту по фиг. 1a вместо продольного балансира 17 (см. фиг. 1) используется система из продольного балансира 24 и шарнирно соединенной с ним Т-образной детали, содержащей продольный несущий элемент 23 и жестко соединенную с ним вертикальную стойку 22. В отличие от выполнения по фиг. 1 цилиндр 31 соединен с соединительной точкой между продольным балансиром 24 и продольным несущим элементом 23.
Согласно варианту по фиг.1b передний направляющий каток 10 и следующий за ним опорный каток 11 установлены раздельно относительно остова 6 ходового механизма. Рычаг 16, на котором установлен передний направляющий каток 10, теперь соединен с коленчатым подпружиненным балансиром 25, который в своей средней точке шарнирно укреплен на остове 6 ходового механизма. Для подпружинивания переднего направляющего катка 10 служит также цилиндр 31, но теперь он соединен с верхним концом подпружиненного балансира 25. Опорный каток 11 установлен относительно остова 6 ходового механизма с помощью отдельного продольного балансира 26, а для подпружинивания опорного катка 11 служит его собственный (дополнительный) цилиндр 35.
Далее функционирование тягача 1, механическая конструкция которого была описана со ссылкой на фиг.1, будет подробно описано со ссылками на фиг. 2a, 2b, 2c, на которых в целях наглядности показан только гусеничный ходовой механизм 4 в различных ситуациях использования. На чертежах схематично представлены гидравлические связи и распределение нагрузки под гусеничным ходовым механизмом.
На фиг. 2а показаны гусеничный ходовой механизм 4 тягача 1 по фиг. 1, и внутреннее распределение в ходовом механизме. Прежде всего, видно, что для катка 20 и для пар катков 10, 11; 12, 13; 14, 15 предназначены упругие элементы с подаваемой в них текучей средой, выполненные в виде цилиндров, соответственно 31, 32, 33, 34 (“Hydrop”). В частности, для катка 20 предназначен упругий элемент 34, для пары катков 10, 11 предназначен упругий элемент 31, для пары катков 12, 13 - упругий элемент 32 и для пары катков 14, 15 - упругий элемент 33.
Как показано на фиг. 2а, упругий элемент 31 относится к переднему блоку 40 пружинной подвески, который образует виртуальную переднюю ходовую ось 40 тягача 1 (не показанного здесь полностью). Упругие элементы 32, 33, 34 относятся к заднему блоку 50 пружинной подвески, который образует виртуальную заднюю ходовую ось 50 тягача 1. Таким образом, гусеничный ходовой механизм 4 внутри подразделен на два блока, которые работают в качестве передней ходовой оси 40 и задней ходовой оси 50. За счет различных рабочих длин виртуальных ходовых осей (в соответствии с длиной опорной поверхности) в показанном случае они образуют блоки, по своей сущности близкие к понятиям «переднее колесо» (= передней ходовой оси 40) и «задняя гусеница» (= задней ходовой оси 50).
Цилиндр 31 виртуальной передней ходовой оси 40 имеет собственное гидравлическое снабжение (не показано), так что ее опорное давление может регулироваться отдельно. В отличие от этого цилиндры 32, 33 и 34 подсоединены к общему гидравлическому контуру 8. При этом в соединительной линии между цилиндрами 32 и 33 расположен запорный клапан и в соединительной линии между цилиндрами 33 и 34 расположен запорный клапан. В показанном на фиг.2а состоянии оба запорных клапана открыты, так что находящаяся в гидравлическом контуре 8 гидравлическая жидкость может свободно распределяться между цилиндрами 32, 33, 34 с одинаковым давлением. Опорное давление, передаваемое на ходовой механизм 4 от центра 9 тяжести тягача 1 (здесь не показанного полностью), воспринимается частично виртуальной передней ходовой осью 40 и частично виртуальной задней ходовой осью 50. При этом подключение цилиндров 32, 33, 34 обеспечивает возможность равномерного распределения сил под областью виртуальной задней ходовой оси 50 даже при колебании внешних силовых воздействий, как это показано столбиками одинаковой длины под катками 12, 13, 14, 15, 20.
Между катками 10 и 11, относящимися к цилиндру 31, имеется неравное распределение сил, обусловленное кинематикой системы, в частности, соотношением рычагов несущей конструкции.
На фиг. 2b показано состояние, в котором гусеничный ходовой механизм 4 находится под тяговой нагрузкой. В частности, это относится к случаю, когда оснащенный гусеничным ходовым механизмом 4 тягач 1 выполняет тяговые работы, например, протягивает плуг. При этом благоприятным образом имеется возможность (несмотря на действие тягового усилия FТяг) разгрузить переднюю ходовую ось 40 от давления настолько, что сумма действующих на гусеничный ходовой механизм 4 моментов равна нулю (или почти равна нулю). Это возможно за счет отдельного гидравлического снабжения виртуальной передней ходовой оси 40 по отношению к задней виртуальной ходовой оси 50. При этом благодаря совместному подсоединению цилиндров 32, 33, 34 распределение сил под областью задней ходовой оси 50 остается постоянным даже при изменяющемся тяговом усилии FТяг (снова: столбики одинаковой длины под катками 12, 13, 14, 15, 20), и силы только возрастают в сумме (вследствие снижения тяговой нагрузки передней ходовой оси 40).
Если тягач эксплуатируется с особенно высоким тяговом усилием FТяг, посредством особого режима перегрузки может быть предотвращен подъем гусеничного ходового механизма 4. Это случай показан на фиг. 2c. В отличие от состояний по фиг. 2a и 2b в режиме перегрузки (фиг. 2c) запорный клапан между цилиндрами 33 и 34 закрыт (обозначено посредством «0»). Теперь в цилиндр 34 может подаваться повышенное гидравлическое давление индивидуально, то есть отдельно от цилиндров 32 и 33. За счет индивидуального управления цилиндр 34 может оказывать повышенное усилие (также и при общем подпружинивании тягача 1), как это показано на фиг. 2c более длинным столбиком под катком 20 по сравнению со столбиками одинаковой длины под катками 12, 13, 14, 15. Благодаря повышенному усилию цилиндра 34 точка маятникового качания гусеничного ходового механизма 4 смещается назад, что препятствует подъему гусеничного ходового механизма 4 или, по меньшей мере, значительно затрудняет его.
В показанном на фиг. 1-2c тягаче 1 конструктивно задано подчинение катков к виртуальным передней ходовой оси 40 или задней ходовой оси 50, то есть это подчинение является постоянным. Альтернативно возможно переменное подчинение катков к различным виртуальным ходовым осям в любом их количестве.
На фиг. 3a и 3b показан гусеничный ходовой механизм 4 тягача с изменяемым подчинением, по меньшей мере, одного опорного катка 13 в различных ситуациях эксплуатации (при дорожном движении и движении на поле). Гусеничный ходовой механизм 4 по фиг. 3a и 3b имеет описанную ниже конструкцию.
Передний направляющий каток 10 подпружинен собственным цилиндром 31, задний направляющий каток 20 подпружинен собственным цилиндром 34. Передняя пара опорных катков 11, 12 совместно подпружинена цилиндром 36, задняя пара опорных катков 14, 15 совместно подпружинена цилиндром 33. Опорный каток 13, расположенный вдоль продольной оси 3 транспортного средства между опорными катками 12 и 14, подпружинен собственным цилиндром 37.
Передние цилиндры 31, 36 принадлежат первому гидравлическому контуру 29 и всегда получают одинаковое давление; задние цилиндры принадлежат второму гидравлическому контуру 8 и всегда получают одинаковое давление. С помощью запорного клапана цилиндр 37 может быть избирательно подключен к первому гидравлическому контуру 29, как это показано на фиг. 3a, или ко второму гидравлическому контуру 8, как это показано на фиг. 3b. Таким образом, гусеничный ходовой механизм 4 имеет гидравлическое снабжение, при котором цилиндр 37 может быть включен либо совместно с цилиндрами 31, 36 в передний блок пружинной подвески (виртуальную переднюю ходовую ось 40), либо совместно с цилиндрами 33, 34 в задний блок пружинной подвески (виртуальную заднюю ходовую ось 50).
Здесь также в пределах одного блока пружинной подвески (виртуальной передней или задней ходовой оси) за счет совместного подключения относящихся к нему цилиндров достигается равномерное распределение опорных сил, что показано столбиками одинаковой длины под соответствующими цилиндрами. Благодаря возможности изменяемого подчинения цилиндра 37 передней или задней ходовой оси может производиться перераспределение весовой нагрузки, действующей на гусеничный ходовой механизм 4, для снижения пиков давления. Это может выполняться в зависимости от нагрузки (с тяговым усилием или без него) и/или от режима движения тягача (движение на поле, дорожное движение). Таким образом, обеспечена возможность адаптации распределения давления под гусеничным ходовым механизмом 4 независимо от балластировки всего транспортного средства.
За счет генерирования различных гидравлических контуров для каждой виртуальной ходовой оси 40, 50 создается переменная точка Pa, Pb маятниковой подвески. В состоянии по фиг. 3a (подчинение цилиндра 37 первому гидравлическому контуру 29) относящийся к передней ходовой оси 40 гидравлический контур 29 имеет точку Pb маятниковой подвески, а относящийся к задней ходовой оси 50 гидравлический контур 8 имеет точку Pa маятниковой подвески.
В отличие от фиг. 3a в состоянии по фиг. 3b (подчинение цилиндра 37 второму гидравлическому контуру 8) точка Pb маятниковой подвески передней ходовой оси 40 и точка Pa маятниковой подвески заметно смещены вперед.
В принципе подчинение цилиндра 37 передней или задней ходовой оси может задаваться вручную оператором транспортного средства. Предпочтительно требуемое выравнивание давления между передней ходовой осью 40 и задней ходовой осью 50 может быть автоматизировано, в частности, в зависимости от рабочих параметров тягача 1, таких как тяговая нагрузка и/или режим движения. Для этого для цилиндров 31, 32, 33, 34, 36, 37 могут быть предназначены датчики давления, причем подчинение опорного катка 13 производится в зависимости от воспринятого состояния давления. Так, например, если воспринятая разница давления между передней ходовой осью 40 и задней ходовой осью 50 превышает задаваемый предел, цилиндр 37 среднего опорного катка 13 переходит в подчинение ходовой оси, на которую действует слишком высокое давление, чтобы снизить перепад давлений между ходовыми осями 40 и 50. Предпочтительно при таком виде регулирования предусмотрен гистерезис, чтобы предотвращать постоянные переключения при небольших колебаниях вокруг предельной величины. Другими входными данными при таком регулировании могут быть такие рабочие параметры как абсолютное давление, усилия на опорных катках 11, 12, 13, 14, 15, скорость движения или другие параметры.
Износ гусеничной ленты 7 при дорожном движении может быть эффективно снижен посредством того, что в режиме дорожного движения в цилиндре виртуальной передней ходовой оси 40 создается меньшее давление по сравнению с режимом движения на поле. Альтернативно или дополнительно имеется возможность снизить усилие, действующее на первый каток, по сравнению с другими катками той же ходовой оси средствами гидравлики и/или механики.
Описанный тягач в соответствии с изобретением, - включая различные описанные варианты, - по сравнению с шарнирно-сочлененными тягачами более компактен и обладает большей маневренностью, так что может использоваться даже на малых площадях. Базовая конструкция двухгусеничного тягача позволяет осуществлять поворот вокруг гусеницы и даже вокруг вертикальной оси транспортного средства.
По сравнению с классическими двухгусеничными тягачами снижена необходимость точной балластировки. От пользователя требуется только грубая балластировка транспортного средства путем оценки проскальзывания под гусеничным ходовым механизмом или путем визуального заключения. При нормальных условиях эксплуатации в задней части гусеничного ходового механизма имеет место равномерное распределение сил. При выполнении в соответствии с концепцией по фиг. 2a-2c нагрузка на переднюю часть мала, однако способствует передаче тягового усилия.
В случае использования показанной на фиг. 3a и 3b концепции «передняя гусеница - задняя гусеница» распределение давления и сил под передними опорными катками также равномерно. Кроме того, колебания тягового усилия ходового механизма, которые практически всегда случаются при работе на поле, могут автоматически выравниваться в пределах от недогрузки до перегрузки.
Благодаря гидропневматической пружинной подвеске гусеничного ходового механизма значительно повышается комфорт, а за счет относительно большой длины гусеничного ходового механизма одновременно снижается продольная качка транспортного средства. Дополнительно по сравнению с классическими полугусеничными транспортными средствами или транспортными средствами с четырьмя гусеницами описанное транспортное средство обладает лучшей управляемостью за счет дифференциального управления поворотом. Благодаря активному управлению передними катками может достигаться сниженный износ грунтозацепов.
По сравнению с полугусеничной концепцией в соответствии с WO 2013/113484 A2 в решении по изобретению не требуется передней ходовой оси. За счет этого не требуется координации при наличии привода колес передней ходовой оси и синхронизации между дифференциальным управлением поворотом задней ходовой оси и рулевым управлением передней ходовой оси.
Другое преимущество данного решения транспортного средства обусловлено большой длиной опорной поверхности, что делает изобретение полезным также для других сельскохозяйственных машин, например, уборочных машин.
Перечень позиций
1 Тягач
2 Рама транспортного средства
3 Продольная ось транспортного средства
4 Гусеничный ходовой механизм
5 Основание
6 Остов ходового механизма
7 Гусеничная лента
8 Гидравлический контур
9 Центр тяжести
10 Передний направляющий каток
11 Опорный каток
12 Опорный каток
13 Опорный каток
14 Опорный каток
15 Опорный каток
16 Рычаг
17 Продольный балансир
18 Продольный балансир
19 Продольный балансир
20 Задний направляющий каток
21 Продольный балансир
22 Вертикальная стойка
23 Продольный несущий элемент
24 Продольный балансир
25 Подпружиненный балансир
26 Продольный балансир
27 Коромысло
28 Коромысло
29 Гидравлический контур
30 Цилиндр натяжения ленты
31 Цилиндр
32 Цилиндр
33 Цилиндр
34 Цилиндр
35 Цилиндр
36 Цилиндр
37 Цилиндр
40 (виртуальная) Передняя ходовая ось
50 (виртуальная) Задняя ходовая ось
FТяг Тяговое усилие
Pa Задняя точка маятниковой подвески
Pb Передняя точка маятниковой подвески
Блок клапанов
Соединительное устройство для соединения гидравлических трубопроводов
Транспортное средство с подъемным оборудованием
Двухгусеничный трактор
Гидравлический клапан
Вентильный блок
Транспортное средство с соединительным устройством для навесных агрегатов и навесной агрегат для такого транспортного средства
Транспортное средство на гусеничном ходу
Ведущая ось транспортного средства
Управляемый гусеничный ходовой механизм сельскохозяйственного рабочего транспортного средства и сельскохозяйственное рабочее транспортное средство
Двухгусеничный трактор
Управляемый гусеничный ходовой механизм сельскохозяйственного рабочего транспортного средства и сельскохозяйственное рабочее транспортное средство
Управляемый гусеничный ходовой механизм
Сельскохозяйственная рабочая машина и способ содействия рулевому управлению

