Результат интеллектуальной деятельности: СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к управляемым летательным аппаратам (ЛА) различных типов базирования.
Известны ЛА (в том числе геофизические ракеты с высотной баллистической траекторией полета), оснащенные бортовыми системами инерциальной навигации (СИН) для возможно более точного движения по программной траектории. При этом в районе стационарной цели (точки приземления) навигация (наведение) таких ЛА может осуществляться посредством бортовой корреляционно-экстремальной системы конечного наведения (КЭСКН). Принцип работы КЭСКН предполагает съемку местности в том или ином спектральном диапазоне длин волн с привязкой к осям бортовой СИН ЛА (таким образом осуществляется отстройка от колебаний, вибраций и маневров ЛА), сравнение наблюдаемого и предварительно подготовленного и введенного в бортовой вычислитель (БВ) ЛА эталонного (в соответствующем спектральном диапазоне) изображения, определение положения ЛА относительно цели и пеленга (направления) на цель (осуществляется в БВ ЛА) - см., например, Г.А. Ефремов, А.И. Киселев, А.Г. Леонов и др. «Яркий след крылатого «Метеорита», М., издат. дом «Бедретдинов и Ко», 2012, с. 119 (НИОКР «Маяк», радиолокационная КЭСКН баллистического ЛА).
Известен также способ навигации (наведения) баллистического ЛА посредством КЭСКН оптического диапазона длин волн (ОКР «Аэрофон») - см., например, А.Б. Шаповалов, В.Л. Солунин, В.В. Костюков «Системы управления, наведения и приводы. История создания и развития», М., изд-во МГТУ им. Н.Э. Баумана, 2017, с. 145-157 (ближайший аналог).
Однако при оснащении ЛА бортовыми СИН с относительно невысоким уровнем точности (например, на базе микромеханических бесплатформенных инерциальных систем, что характерно для ряда ЛА геофизического и специального назначения) КЭСКН утрачивает работоспособность из-за несоответствия привязки наблюдаемого изображения истинному (действительному) положению относительно ЛА, что вызывается угловыми уходами осей СИН за время полета. В то же время оснащение подобных ЛА бортовыми высокоточными СИН является нерациональным по критерию «эффективность-стоимость».
Технической задачей предлагаемого изобретения является создание способа навигации ЛА с радиолокационными и/или оптическими КЭСКН, позволяющего рационально с позиции критерия «эффективность-стоимость» реализовать необходимую точность привязки наблюдаемых изображений местности при использовании бортовой СИН с уровнем точности не выше среднего.
Решение указанной технической задачи достигается тем, что при полетной навигации ЛА, включающей съемку местности бортовой КЭСКН с привязкой к осям бортовой СИН, сравнение наблюдаемого и предварительно подготовленного и размещенного в БВ эталонного изображения, определение БВ положения ЛА относительно цели и пеленга на цель, - на ЛА размещают с привязкой к связанной системе координат (СК) не менее одной телевизионной камеры (ТВК) с матричным фотоприемным устройством (МФПУ), предварительно в БВ вводят каталог звездного поля с координатами звезд не более +5m по уровню блеска, сидерическое время пуска ЛА, стартовые географические координаты ЛА, после пуска ЛА при его выходе на пассивный участок траектории (ПУТ) посредством бортовых органов управления приводят угловые скорости ЛА по всем осям к близким к нулевым значениям по измерениям бортовой СИН, на ПУТ выше 20 км производят посредством ТВК не менее одной обсервации звездного поля, при этом осуществляют стабилизацию поля зрения ТВК по измерениям бортовой СИН, уход углового положения каждой из осей СИН на момент времени обсервации определяют в БВ как разность значений углового положения зафиксированного посредством МФПУ ТВК направления на ориентир звездного поля в связанной СК ЛА и расчетного направления на этот же ориентир относительно оси СИН в связанной СК ЛА, вычисленные значения уходов каждой из осей СИН сохраняют в БВ, по дальности до цели в БВ вычисляют поправку к угловому положению местной вертикали, возникающую вследствие кривизны земной поверхности, а в процессе навигации ЛА осуществляют съемку местности КЭСКН с привязкой к осям СИН с учетом вычисленных уходов и поправок. Кроме того, при обсервации звездного поля дополнительно производят последовательные развороты ТВК на звездные ориентиры посредством одностепенного или многостепенного управляемого подвеса. Вариант: угловую стабилизацию и последовательные угловые развороты ЛА на звездные ориентиры производят посредством дополнительно введенной реактивной либо электромеханической (без расхода рабочего тела) бортовой системы ориентации и стабилизации. При этом в наиболее простом случае система ориентации и стабилизации ЛА осуществляет угловые развороты и стабилизацию относительно только его продольной оси. В общем случае система ориентации и стабилизации ЛА осуществляет последовательные угловые развороты и стабилизацию вокруг центра масс относительно любой из связанных осей аппарата. При этом в качестве рабочих органов системы ориентации и стабилизации ЛА применяют не менее одного маховика или гиродина, либо применяют газовые или импульсные твердотопливные ракетные двигатели. В качестве ориентира звездного поля принимают звезду из бортового каталога с известными координатами на небесной сфере. Вариант: в качестве ориентира звездного поля принимают условный центр масс линии или плоской фигуры, в вершинах которых расположены звезды из бортового каталога с известными координатами на небесной сфере. При смазе изображения звезд в вершинах плоской фигуры в бортовом вычислителе ЛА производят математическую коррекцию положения координат вершин с учетом априорной информации бортового каталога звездного поля. В свою очередь, при геометрических искажениях плоской фигуры вследствие дисторсии объектива ТВК в бортовом вычислителе ЛА производят математическую коррекцию положения координат вершин с учетом паспортных данных объектива ТВК и априорной информации бортового каталога звездного поля. При этом работу ТВК в режиме обсервации ограничивают выдержкой не более 1,0 с. Следует также отметить, что для обсервации звездного поля представляется целесообразным применять жестко зафиксированные относительно связанной СК либо размещенные на управляемом подвесе ТВК из состава оптической корреляционно-экстремальной системы конечного наведения ЛА.
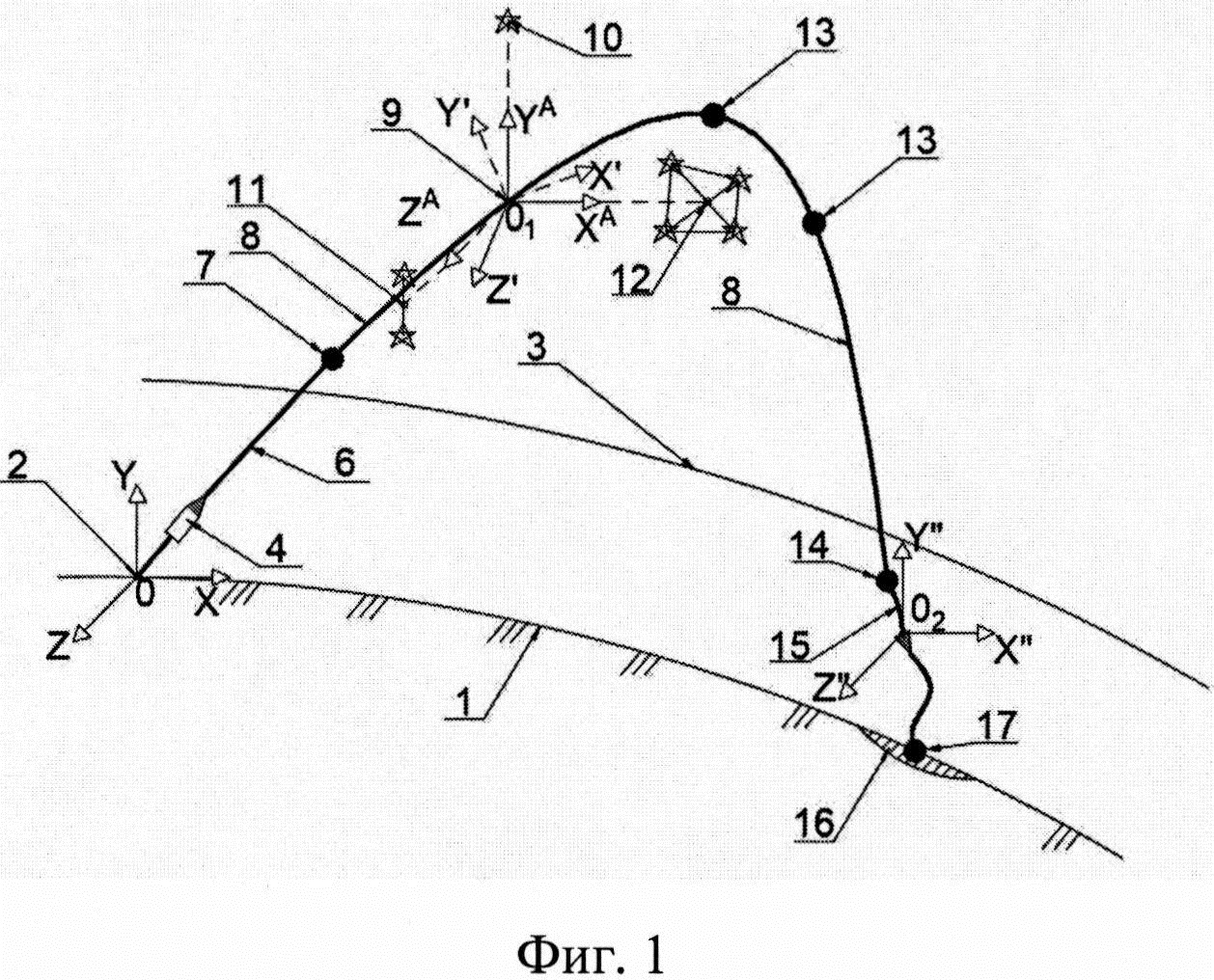
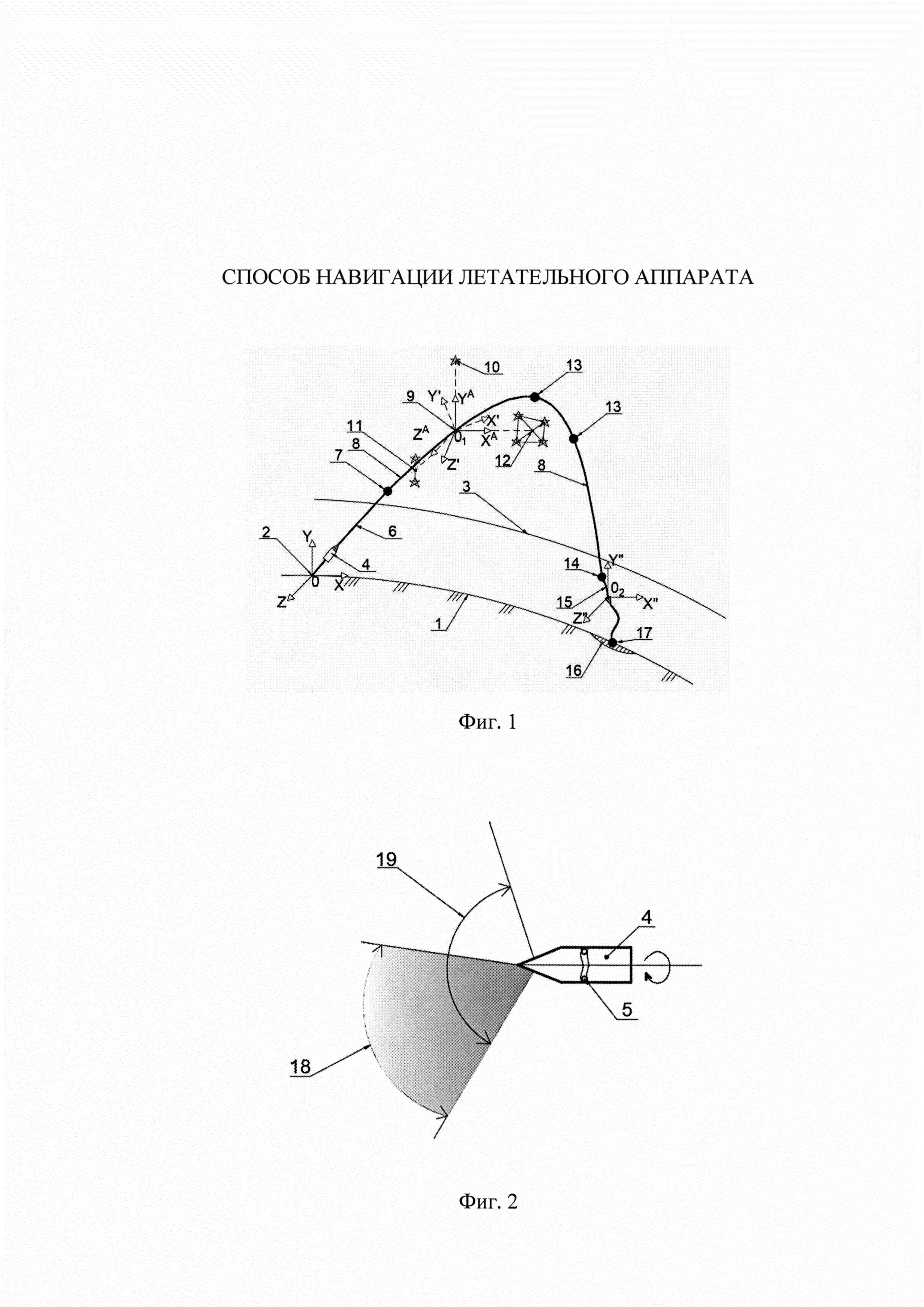
На фиг. 1 показан вариант реализации предложенного технического решения для ЛА баллистического типа. На фиг. 2 приведена схема полей зрения ТВК ЛА при полном провороте аппарата вокруг продольной оси.
Приняты обозначения:
1 - поверхность земли (в плоскости полета баллистического ЛА);
2 - точка пуска ЛА (вариант наземного старта);
3 - граница высоты 20 км от поверхности земли;
4 - баллистический летательный аппарат;
5 - маховик системы ориентации и стабилизации ЛА (вариант);
6 - активный участок траектории баллистического ЛА;
7 - выключение двигательной установки ЛА, минимизация угловых возмущений по всем осям, начало ПУТ;
8 - пассивный участок траектории баллистического ЛА;
9 - сеанс обсервации звездного поля и астрокоррекции углового положения осей бортовой СИН ЛА;
10 - звезда (ориентир звездного поля);
11 - условный центр масс отрезка прямой, соединяющего две звезды (ориентир звездного поля);
12 - условный центр масс плоской фигуры, вершины которой образованы звездами (ориентир звездного поля);
13 - дополнительные сеансы обсервации звездного поля и астрокоррекции углового положения осей СИН ЛА;
14 - начало работы радиолокационной и/или оптической КЭСКН ЛА;
15 - управляемая по информации от КЭСКН траектория движения ЛА;
16-расчетный эллипс рассеяния ЛА при неуправляемом баллистическом полете;
17 - стационарная наземная цель (точка прицеливания ЛА);
18 - поле зрения ТВК ЛА;
19 - поле обзора звездных ориентиров за полный оборот ЛА вокруг продольной оси.
Функционирование баллистического ЛА в рамках предложенного технического решения осуществляется, например, следующим образом (фиг. 1). С поверхности земли поз. 1, из точки пуска поз. 2 производится старт ЛА поз. 4. При этом бортовая СИН ЛА поз. 4 формирует инерциальную (например, стартовую) СК OXYZ, которая, в идеале, должна оставаться неизменной на протяжении всего полета ЛА поз. 4. На активном участке движения поз. 6 ЛА поз. 4 система инерциальной навигации изделия позволяет (в составе бортовой системы управления) сформировать баллистическую траекторию, обеспечивающую - при прицеливании ЛА поз. 4 в точку поз. 17 - гарантированное попадание ЛА поз. 4 в зону расчетного эллипса рассеяния поз. 16.
Окончание работы двигательной установки ЛА поз. 4 (соответственно, окончание активного участка траектории поз. 6 и начало ПУТ поз. 8) соответствует точке поз. 7 на траектории полета; при этом точка поз. 7 может быть выше или ниже условной границы поз. 3 высоты в 20 км, выше которой можно проводить беспомеховую обсервацию звездного поля в любое время года и суток.
Теория астрокоррекции ЛА изложена, например, в публикациях: A.M. Каменский «Теория астрономической коррекции», М., «Машиностроение», 1974; И.И. Помыкаев, В.П. Селезнев, Л.А. Дмитроченко «Навигационные приборы и системы», М., «Машиностроение», 1983, с. 172-217, 390-393; В.П. Селезнев «Навигационные устройства», М., Оборонгиз, 1961, с. 340-418.
Следует отметить, что практическим применением астрокоррекции является, в первую очередь, уточнение пространственных координат летательного аппарата дальнего радиуса действия (иначе: определение отличия действительных координат ЛА от их программных значений в инерциальном пространстве) - см., например, Э. Бургесс «Управляемое реактивное оружие», М., Изд-во иностранной литературы, 1958, с. 92, П.Т. Егоров «Реактивное оружие», М., Воениздат, 1960, с. 148-150. При этом угловые уходы (по разным причинам) инерциальных осей СИН не корректируются, поскольку за время полета подобных ЛА (не более ~ 30 минут на межконтинентальную дальность) для СИН высокой точности не являются критичными.
В свою очередь, астронавигационные системы, применяемые на космических аппаратах в условиях длительных (месяцы, годы) сроков их активного существования, предполагают при штатной работе реализацию продолжительных (минуты) периодов непрерывной обсервации ориентиров звездного поля при жестком поддержании углового положения гироплатформы либо конструктива (базы) размещения оптических сенсоров/телескопов (не более десятых долей углового градуса в минуту) - см., например, А.Н. Липатов, А.Н. Ляш, А.П. Экономов и др. «Звездный датчик для наноспутника», М., Вестник СибГАУ, №3(49), 2013. В этой связи важно отметить следующее: существующие способы астронавигации дальнобойных ракетных и космических ЛА не позволяют технически рационально решать задачи угловой привязки наблюдаемых изображений бортовой КЭСКН относительно простых ЛА, например, геофизического и специального назначения и исключительно невыгодны по критерию «эффективность-стоимость».
Для навигации (наведения) ЛА поз. 4 с использованием бортовой КЭСКН (которая, как правило, функционирует в режиме косвенного наведения - без непосредственного визирования цели поз. 17) привязка наблюдаемого изображения в том или ином спектральном диапазоне длин волн (в активном режиме, например, с применением радиолокатора с синтезированной апертурой антенны; в пассивном режиме, например, с применением оптико-электронных систем на базе ТВК) к инерциальным осям бортовой СИН является обязательным условием штатной работы. При этом характерный для «массовых»/«бюджетных» СИН средней (и ниже) точности значительный угловой уход инерциальных осей (критический для работоспособности КЭСКН) может быть скомпенсирован (измерен) посредством астрокоррекции по ориентирам звездного поля.
Астрокоррекция углового положения осей СИН осуществляется следующим образом.
В состав полетного задания, которое вводится в бортовой вычислитель ЛА поз. 4, включаются каталог звездного поля с координатами звезд не более 5 звездной величины (+5m), сидерическое (звездное) время пуска ЛА поз. 4, географические стартовые координаты ЛА поз. 4. Следует отметить, что значение блеска звездных ориентиров +5m выбрано из условия функционирования ТВК в режиме коротких (не более 1,0 с) выдержек (что лимитируется параметрами стабилизации ЛА поз. 4 и, соответственно, допустимым уровнем смаза точечного изображения звезды на МФПУ), а также наличием гарантированного необходимого и достаточного количества звездных ориентиров (несколько сотен в пределах небесной сферы) при простой аппаратной фильтрации более тусклых звезд. При этом сидерическое время и географические координаты старта обеспечивают возможность однозначной привязки осей бортовой СИН к ориентирам небесной сферы.
В точке поз. 9 проведения первого сеанса обсервации звездного поля угловое положение осей СИН ЛА поз. 4 соответствует СК O1X'Y'Z' которая, вследствие уходов (по разным причинам) осей СИН, не совпадает с исходной СК OXYZ (в точке поз. 2).
В предлагаемом техническом решении реализован следующий порядок стабилизации поля зрения ТВК при обсервации ориентиров звездного поля (в фиксированные моменты времени формирования изображения на МФПУ):
- посредством одностепенного или многостепенного управляемого подвеса (независимо от положения корпуса ЛА поз. 4 в расчетном диапазоне углов прокачки подвеса);
- посредством дополнительно введенной в состав ЛА поз. 4 системы ориентации и стабилизации.
При этом наличие специализированной бортовой системы ориентации и стабилизации позволяет осуществлять неоднократные угловые развороты (с последующей стабилизацией) ЛА поз. 4 относительно любой оси связанной СК (в случае полноформатного углового управления ориентацией относительно центра масс).
В системах ориентации и стабилизации ЛА поз. 4 с реактивными рабочими органами представляется целесообразным применение газовых (на холодном либо горячем газе) или импульсных твердотопливных ракетных двигателей малой размерности.
В качестве исполнительных рабочих органов безрасходной по рабочему телу системы ориентации и стабилизации ЛА поз. 4 могут применяться, например, маховики поз. 5 или гиродины (один или более - соответственно, по одной или более осям связанной СК). При этом упраздняется операция так называемой разгрузки маховиков поз. 5 (гиродинов), поскольку за ограниченное (минуты) время полета ЛА поз. 4 для реальных конструкций предельный гироскопический момент не успевает накопиться (при необходимости, операция разгрузки может быть проведена на конечном атмосферном участке полета ЛА поз. 4 посредством компенсации накопленного гироскопического момента аэродинамическим моментом противоположного знака, создаваемым аэродинамическими рулями или элеронами/элевонами ЛА).
На фиг. 2 представлен пример программного проворота ЛА поз. 4 вокруг продольной оси с соответствующей схемой полей зрения ТВК. Данный прием позволяет, имея всего один, например, простой кольцевой маховик поз. 5 - в том числе размещенный удаленно относительно центра масс аппарата - для ТВК с относительно узким полем зрения (поз. 18) путем последовательных поворотов ЛА поз. 4 осуществлять обзор практически в пределах полусферы (с соответствующим количеством звездных ориентиров в 1/2…1/3 их общего числа). При этом поле обзора звездных ориентиров за полный оборот ЛА поз. 4 показано на поз. 19.
Следует отметить, что для устойчивой астрокоррекции СИН исключительно важным условием является минимизация начальных угловых возмущений ЛА поз. 4 по всем осям. Это достигается (в частности, при выходе ЛА поз. 4 на ПУТ поз. 8) посредством штатных органов управления (например, аэродинамических или газодинамических рулей) по информации (измерениям) бортовой СИН. Давление (~ 5,5×103 Па) и плотность (~ 0,088 кг/м3) атмосферы на высоте 20 км (поз. 3) при свободном (без ускорений и вибраций от работы двигательной установки) движении ЛА поз. 4 на ПУТ поз. 8 позволяют осуществлять необходимые маневры ориентации и стабилизацию аппарата при обсервации звездного поля без чрезмерных энергетических затрат. При дальнейшем подъеме ЛА поз. 4 в еще более разреженные слои атмосферы энергетические затраты для угловых разворотов аппарата вокруг центра масс дополнительно снижаются, что справедливо практически для любого существующего эллипсоида инерции ЛА поз. 4 (с учетом парирования неустойчивостей).
После проведения посредством бортовой (бортовых) ТВК сеанса обсервации звездного поля в точке поз. 9 - уход углового положения каждой из осей СИН (на фиксированный момент времени обсервации) вычисляется в БВ как разность значений углового положения измеренного посредством МФПУ направления на ориентир звездного поля (поз. 10, 11, 12 - варианты звездных ориентиров) и расчетного направления на этот же звездный ориентир (относительно соответствующей оси СИН: например, О1Х', O1Y', O1Z' в точке поз. 9); и то, и другое рассчитывается в связанной СК ЛА поз. 4. Другими словами, в инерциальном пространстве определяются значения углов (уходов осей СИН) Х'O1XA, Y'O1YA, Z'O1ZA, которые сохраняются в бортовом вычислителе ЛА поз. 4 (в данном случае предполагается, что в инерциальном пространстве звездного поля ось O1XA параллельна исходной OX, O1YA//OY и O1ZA//OZ).
В качестве ориентира звездного поля может использоваться, например, отдельная звезда поз. 10 из бортового каталога с известными с высокой точностью координатами на небесной сфере (пример направления на ориентир для обсервации из точки поз. 9 - ось O1YA), либо условный центр масс отрезка прямой (поз. 11), соединяющего две звезды (ось O1ZA\ либо условный центр масс плоской фигуры (поз. 12), вершины которой образованы звездами из бортового каталога (ось O1XA).
В случае смаза на МФПУ ТВК изображения точечного ориентира-звезды в вершинах плоской фигуры, например, из-за погрешностей работы системы стабилизации ЛА поз. 4 - производится математическая коррекция положения координат вершин с учетом априорной информации бортового каталога звездного поля (точных - с субсекундной угловой привязкой - относительных координат каждой звезды созвездия). При этом в качестве расчетной выбирается координата условного центра масс «пятна» смаза (вариант).
Аналогично, при геометрических искажениях плоской фигуры вследствие дисторсии объектива ТВК - производится математическая коррекция положения координат вершин с учетом известных паспортных данных объектива ТВК (параметров дисторсии) и априорной информации бортового каталога звездного поля (точных координат звезд - вершин плоской фигуры-созвездия).
В точках поз. 13 ПУТ поз. 8 сеанс обсервации звездного поля и астрокоррекции углового положения осей СИН ЛА поз. 4 повторяется (при наличии запаса полетного времени).
Следует отметить, что представляется крайне перспективным использование для обсервации звездного поля ТВК, входящих в состав оптической КЭСКН. При этом могут применяться как жестко зафиксированные относительно связанной СК ЛА поз. 4 телевизионные камеры, так и ТВК КЭСКН, размещенные на управляемом одностепенном либо многостепенном подвесе.
Следует отметить, что для штатного функционирования бортовой КЭСКН в любом спектральном диапазоне принципиально важным является знание точной угловой ориентации местной вертикали (линии «зенит» - «надир»), которая соответствующим образом изменяется при полете ЛА поз. 4 вследствие кривизны земной поверхности. Вычисление поправки к угловому положению местной вертикали производится БВ с учетом известных на момент старта ЛА поз. 4 данных по дальности до цели (от точки поз. 2 до точки поз. 17) и параметров табличной фигуры геоида.
При входе ЛА поз. 4 в плотные слои атмосферы и соответствующем увеличении эффективности аэродинамических органов управления в точке поз. 14 начинается участок навигации (штатное функционирование КЭСКН) и управления летательным аппаратом для реализации траектории поз. 15. При этом текущие значения углового положения осей бортовой СИН (O2X''Y''Z'') корректируются БВ с учетом вычисленных ранее уходов и поправок, а радиолокационная и/или оптическая корреляционно-экстремальная система конечного наведения формирует соответствующим образом ориентированные наблюдаемые изображения местности, которые бортовой вычислитель ЛА поз. 4 сравнивает с эталонными изображениями того же масштаба и пространственной ориентации. На основании данных сравнения наблюдаемого и эталонного изображений производится решение навигационной задачи по определению координат ЛА поз. 4 относительно цели поз. 17 и пеленга на цель поз. 17, а также выдаются команды на органы управления для формирования попадающей траектории поз. 15.
Применение предложенного технического решения представляется целесообразным для оснащения управляемых по КЭСКН летательных аппаратов различных типов базирования и целевого назначения, для которых значение критерия «эффективность-стоимость» является определяющим.
Способ формирования сигнала стабилизации продольного углового движения беспилотного летательного аппарата
Способ и устройство непрерывной сублимационной сушки жидких продуктов
Стенд тарировки телесистем
Способ выработки топлива из бака летательного аппарата
Способ крепления плоского защитного стекла иллюминатора
Тепловая защита негерметичного отсека двигательной установки летательного аппарата
Способ обеспечения теплового режима приборного отсека летательного аппарата
Композиционный материал для замещения костной ткани
Комплекс оружия для поражения наземных береговых объектов и способ его применения с подводных носителей
Способ управления автономной системой электропитания космического аппарата
Композиционный материал для замещения костной ткани
Роторный газотурбинный двигатель
Комплекс оружия для поражения наземных береговых объектов и способ его применения с подводных носителей
Обечайка корпуса летательного аппарата
Многоцелевая трансформируемая орбитальная система и способ ее применения
Ракетно-космический комплекс и способ функционирования ракетно-космического комплекса
Способ поражения цели сверхзвуковой крылатой ракетой и сверхзвуковая крылатая ракета для его осуществления
Система спутниковой навигации крылатой ракеты (варианты)
Способ оперативной доставки средств спасения терпящим бедствие людям в удаленных районах с неточно известными координатами и ракетный комплекс оперативной доставки средств спасения
Ракета в транспортно-пусковом контейнере

