Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ НА ВОЗДУШНУЮ ЦЕЛЬ
Вид РИД
Изобретение
Область техники
Изобретение относится к области систем самонаведения, в частности к способам наведения носителя на цель оптической головкой самонаведения (ОГС).
Предшествующий уровень техники
Известен способ, описанный в патенте на полезную модель №160102 «Головка самонаведения управляемого авиационного изделия»; приоритет: 26.08.2015, опубликовано: 10.03.2016; МПК F41G 7/22, F42B 15/01 (2006.01); патентообладатель: Закрытое акционерное общество "Решение информационных задач" "РЕИНЗ" (RU), авторы: Прокуда И.А., Говсеев С.В., Климов В.М., Алексеев Е.Г., Колокольцев Е.Н., Митрофанов B.C., Кузнецов С.В., Ижиков В.И., Андреев Б.М., Мартиросов А.В. (RU).
Излучение цели и других объектов, включая возможные помехи, поступает на четыре ТВ камеры 1, 2, 3, 4 одновременно. Оптическое излучение в каждой ТВ камере преобразуется в электрические сигналы и с каждой камеры эти сигналы подаются в каждый из четырех узлов предварительной обработки и оцифровки видеосигнала соответствующей своей камере. В каждом из четырех узлов предварительной обработки и оцифровки видеосигнала поступающие электрические сигналы оцифровываются, фильтруются и определяются их уровни усиления и смещения, такие, чтобы динамический диапазон входного сигнала был использован максимально.
Недостатком данного способа является сложность и ограниченное быстродействие из-за необходимости передачи и обработки нескольких изображений. Способ предназначен для работы с целями на земле, которые должны иметь большие размеры.
Известен способ, на который получен патент РФ на изобретение на изобретение №2603235 «Способ обнаружения и высокоточного определения параметров скоростных летящих целей и головка самонаведения, его реализующая», МПК F41G 7/00 (2006.01); приоритет 31.03.2015; опубликовано: 27.11.2016; Автор: Прокуда И.А. (RU); Патентообладатель: ЗАО "Решение информационных задач" "РЕИНЗ" (RU).
Сначала осуществляют действия по выделению целеподобных объектов от помех фона и иных низкоскоростных крупногабаритных помех. Далее производят выделение цели по комплексу признаков: яркость, геометрические размеры, взаимное расположение частей, форма и т.д. Суммарные данные группируют в совокупности или образы, сопоставляют их с «эталонными» образами, хранящимися в памяти, и определяют координаты цели.
Недостатком данного способа является сложность технологического процесса обнаружения объектов, недостаточное быстродействие из-за применения гирокоординатора и множественной обработки кадров, невозможность миниатюризации устройства.
В качестве прототипа, был выбран патент РФ на изобретение №2176773 «Способ наведения», МПК: F41G 7/22, G01S 3/78 (2000.01), приоритет 02.08.1999, опубликовано: 10.12.2001; Авторы: Гуревич М.С., Еськин В.Н., Марченков В.М., Померанец Е.Я., Пролыгин Е.В., Тощаков С.А., Чупраков A.M.; Патентообладатель(и): ОАО "ЛОМО".
Определяют координаты индицируемых в поле зрения ОГС точек цели, формируют матрицу координат, идентифицируют цель с одной из точек контура изображения цели и формируют в соответствии с координатами этой точки сигналы автосопровождения цели и управления носителем. Определяют координаты геометрического центра и особых в математическом смысле точек контура изображения цели.
Недостатком данного способа является использование контура целей и возможность срыва автосопровождения в случаях применения маскировки для целей, таких как искажение или разрыв контура, световая ловушка. Дополнительно к этому сложность математической обработки сигнала изображения ограничивает быстродействие способа.
Раскрытие изобретения
Задачей, на решение которой направлено заявляемое изобретение, является ускорение поиска цели (объекта в воздухе), повышение устойчивости к применению маскировки цели, выдача сигнала при достижении заданной дистанции до цели известного размера.
Технический результат, достигаемый при решении этой задачи, заключается в понижении вычислительной нагрузки устройства обработки сигнала, уменьшении количества операций сохранения и передачи массивов данных, ускорении обработки изображений, получаемых ОГС одновременно с приемом изображений, повышении стойкости работы к цветомаскировке цели и выбросу световых ловушек.
Технический результат достигается тем, что в способе наведения на воздушную цель, включающем определение координат цели по индуцируемым в поле зрения оптической головки самонаведения (ОГС) точкам цели, согласно изобретению, построчно регистрируют и записывают сигналы от пикселей фоточувствительной матрицы, регистрирующей текущее изображение поля зрения ОГС, начиная с первой строки матрицы, обрабатывают сигналы от пикселей. Одновременно с обработкой сигналов от пикселей в текущей строке записывают сигналы от пикселей в следующей строке. В процессе обработки сигналов в текущей строке проводят усреднение значения сигналов от каждого пикселя с заданного числа окружающих его пикселей. Полученные усредненные значения сигналов преобразуют в зависимости от яркости цели относительно яркости окружающего ее фона и определяют разность Н усредненного и неусредненного сигналов, Начиная с начала текущей строки определяют номер пикселя X1, для которого значение Н становится положительным, максимальное положительное значение Hm, номер пикселя Х2, после которого значение Н в текущей строке не является положительным, номер текущей строки Y. Записывают в память X1, Hm, X2,Y. Обрабатывают следующую строку матрицы и определяют в ней значения X1, Hm, X2,Y, а в случае превышения величины Hm значения, записанного для предыдущей строки, перезаписывают в память новые значения X1, Hm, X2,Y. По окончании обработки сигналов всех строк матрицы определяют координаты цели как (Х1+Х2)/2 и Y и выдают соответствующие управляющие сигналы на исполнительные устройства носителя.
Совокупность существенных признаков обеспечивает получение технического результата - понижение вычислительной нагрузки устройства обработки сигнала, уменьшение операций сохранения и передачи массивов данных, ускорение обработки изображений, получаемых ОГС, одновременно с приемом изображений, повышение стойкости работы к выбросу световых ловушек. Это позволяет решить задачу ускорения поиска воздушного объекта, повышения устойчивости к применению маскировки цели, выдачи сигнала при достижении заданной дистанции до воздушного объекта известного размера.
Возможно, при яркости цели превышающей яркость окружающего ее фона, полученные усредненные значения сигналов увеличивают на заданную величину, полученные в результате увеличенные усредненные значения сигналов от каждого пикселя вычитают из значения сигналов, полученных от соответствующих пикселей, получают значение Н разности сигналов.
Возможно при яркости цели меньше яркости окружающего ее фона, полученные усредненные значения сигналов уменьшают на заданную величину, из полученных уменьшенных усредненных значений сигналов от каждого пикселя вычитают сигналы, полученные от соответствующих пикселей, получают значение Н разности сигналов.
Это позволяет решить задачу ускорения поиска воздушного объекта, повышения устойчивости к применению маскировки цели.
В процессе обработки пикселей в текущей строке возможно повторное выявлении группы смежных пикселей с положительным значением Н, в этом случае повторно определяют значение Hm и в случае его превышения над ранее определенным в текущей строке перезаписывают значения X1, Hm, X2,Y.
Это позволяет улучшить технический результат в части отсева ложных целей и помех на регистрируемом изображении.
При достижении значения Х2-Х1 заранее известной величины, возможно, выдают управляющий сигнал на исполнительные устройства носителя о достижении заданной дистанции до цели известного размера.
Это позволяет улучшить технический результат по определению заданной дистанции до цели.
Возможно, определяют и запоминают минимальное Y1 и максимальное значение Y2 строк, вне которых нет положительных значений Н, при достижении значения (Y2-Y1) заранее известной величины выдают сигнал на исполнительные устройства носителя о достижении заданной дистанции до воздушного объекта известного размера.
Это позволяет улучшить технический результат по повышению надежности определения заданной дистанции до цели, например, в случае ее маневрирования, изменения ракурса ее обзора, освещения.
Возможно, учитывают значения Hm, которые попадают в заданный диапазон.
Это позволяет улучшить технический результат в части обнаружения цели с заранее известными характеристиками и для исключения наведения на яркие посторонние объекты, например, солнце, луна, ловушки.
Возможно, в случае наличия фрагментов цели с яркостью больше и меньше яркости окружающего ее воздушного фона раздельно обрабатывают матрицу и определяют координаты цели как усредненные значения (X1+Х2)/2 и Y.
Это позволяет улучшить технический результат по наведению на цель, яркость которой изменяется в результате ее маневрирования и изменения условий ее освещения.
Из выполненных обработок матриц изображений можно определять максимальное значение Х2-Х1 и при достижении значения Х2-Х1 заранее известной величины выдавать управляющий сигнал на исполнительные устройства носителя о достижении заданной дистанции до цели известного размера.
Это позволяет улучшить технический результат по повышению точности определения дистанции до цели.
Краткое описание фигур чертежа
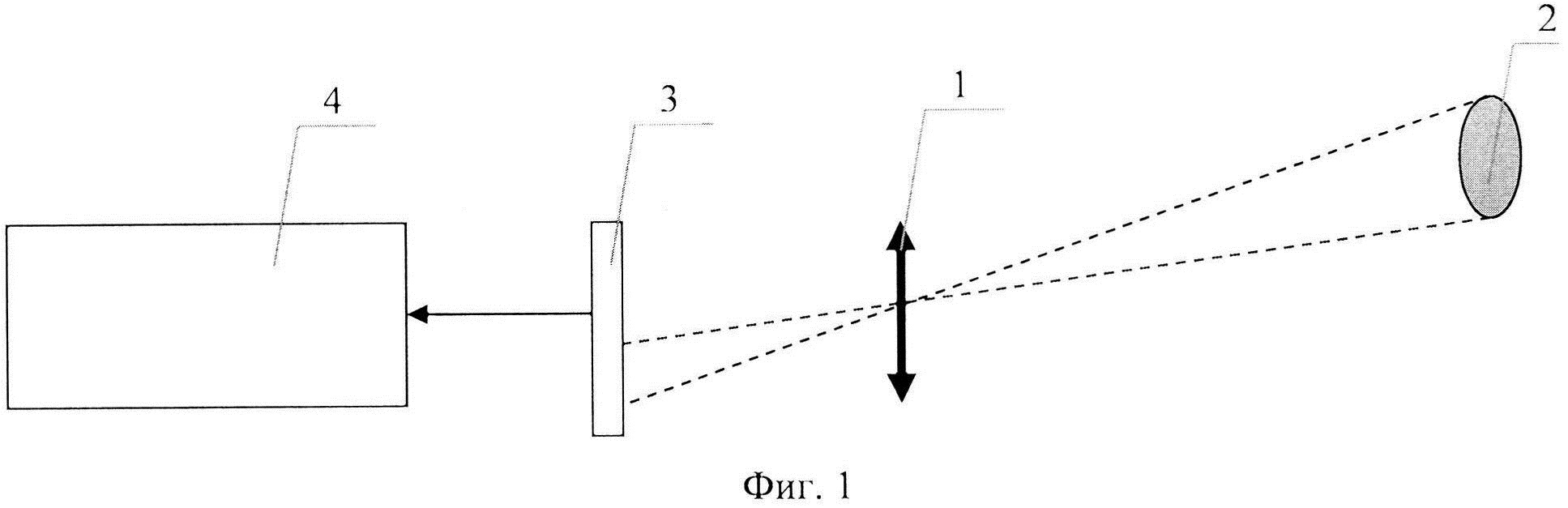
На фиг. 1 показана структурная схема ОГС.
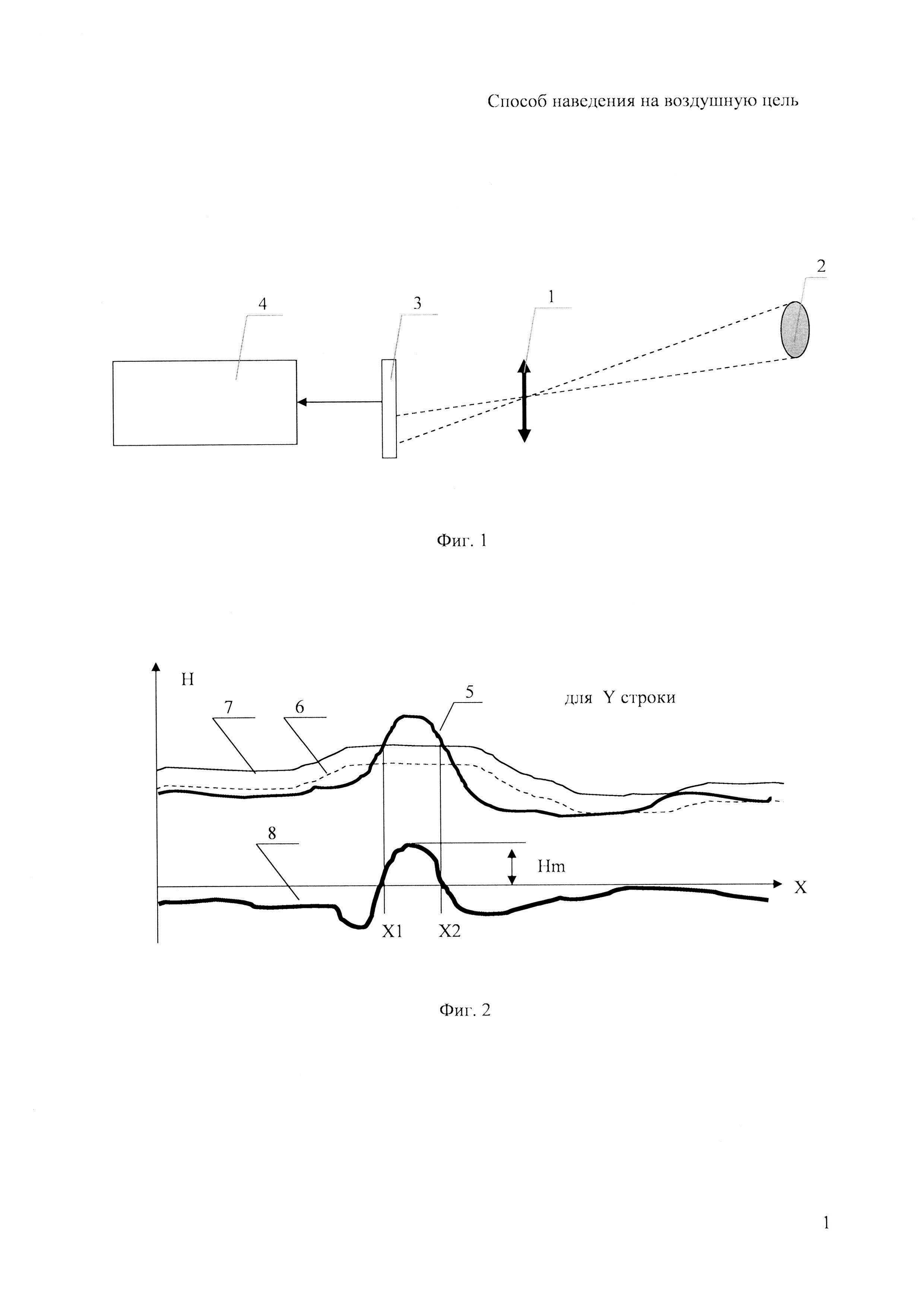
На фиг. 2 показана кривая распределения сигналов от пикселей в одной строке матрицы в случае, когда яркость цели превышает яркость окружающего ее фона.
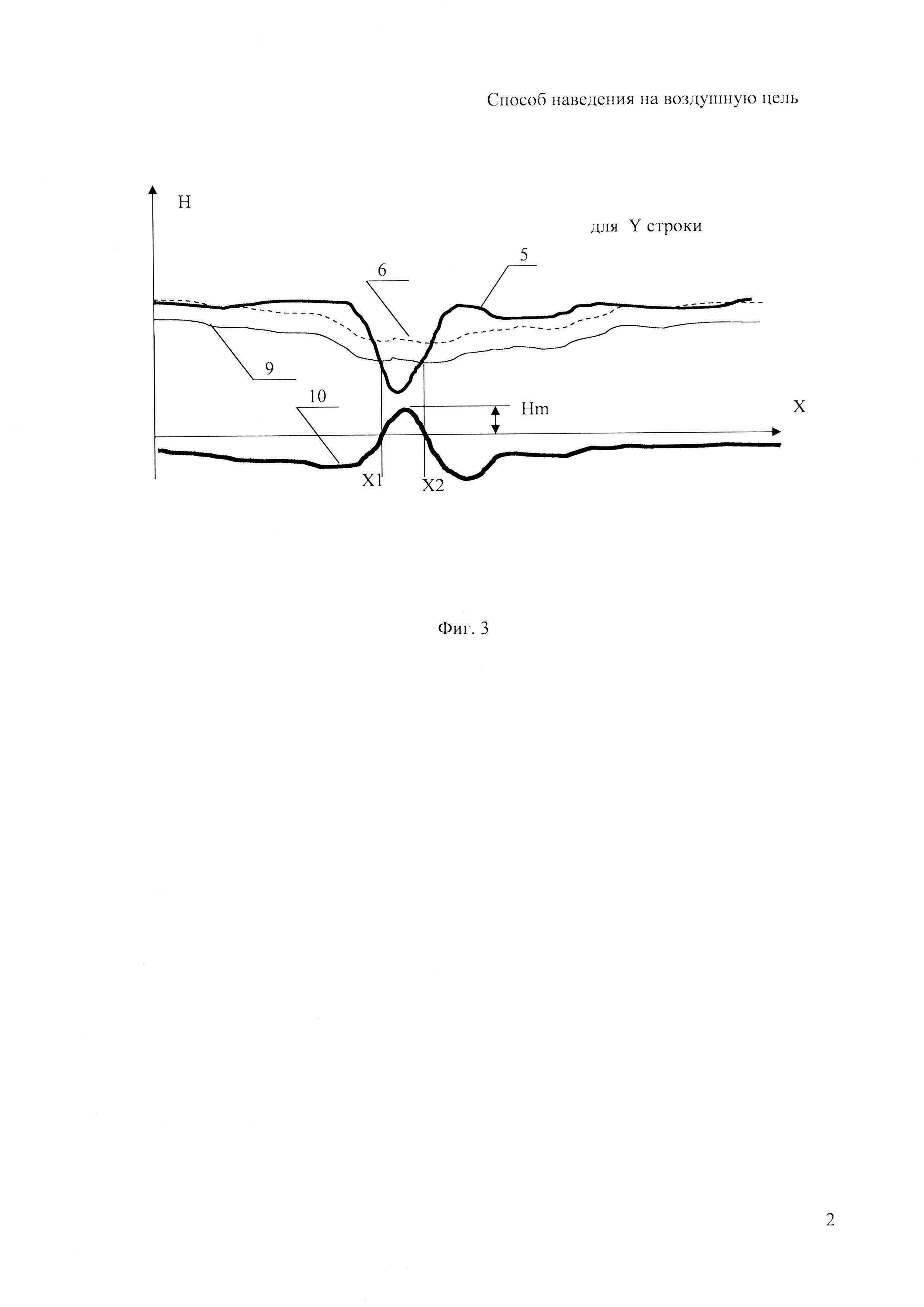
На фиг. 3 показана кривая распределения сигналов от пикселей в одной строке матрицы в случае, когда яркость цели меньше яркости окружающего ее фона.
Вариант осуществления изобретения
Для способа наведения на воздушную цель была разработана оптическая головка самонаведения (ОГС), структурная схема которой представлена на фиг. 1. ОГС включает в себя объектив 1, через который проходит свет от самой цели 2 (объекта в воздухе) или отраженный от нее. Изображение цели 2 проецируют на приемник 3 изображения, выполненный в виде фоточувствительной матрицы, например, CMOS-матрицы. На приемнике 3 регистрируют текущее изображение поля зрения ОГС, содержащего участок неба с целью 2, преобразуют изображение в электрические сигналы, которые поступают в блок обработки 4 изображения. В блок обработки 4 поступают сигналы от каждого пикселя фоточувствительной матрицы приемника 3.
На фиг. 2 показана кривая 5 уровня сигналов от пикселей в одной строке матрицы в зависимости от номера пикселя в строке этой матрицы. Где X - номер пикселя в Y - строке матрицы, Н - уровень сигнала от пикселя.
Запись сигналов от пикселей фоточувствительной матрицы в блок обработки 4 происходит построчно.
После записи в блок обработки 4 первой строки матрицы проводят для каждого пикселя данной строки усреднение сигналов с заданного количества окружающих пикселей, прямо пропорционального числу пикселей в строке. Заданное количество окружающих пикселей, как правило, выбирают в диапазоне 2…10 пикселей.
Одновременно с обработкой первой строки проводят запись в блок обработки 4 второй строки матрицы.
После записи в блок обработки 4 очередной строки матрицы, проводят для каждого пикселя этой строки усреднение сигналов с заданного количества окружающих пикселей. Полученному распределению усредненного сигнала соответствует кривая 6 на фиг. 2.
Полученные усредненные значения сигналов увеличивают на заданную величину смещения, если яркость цели превышает яркость окружающего ее фона. В результате получают кривую 7 на фиг. 2.
Заданная величина - это величина смещения, которая соответствует уровню шума приемника изображения 3, или неоднородностям фона. Как правило, средний разброс сигналов от пикселей составляет 10…15%.
Полученные в результате увеличенные усредненные значения сигналов от каждого пикселя в виде кривой 7 вычитают из значения сигналов, полученных от этих же пикселей в виде кривой 5. Полученным значениям разности этих сигналов соответствует кривая 8 на фиг. 2.
Начиная с начала текущей строки определяют номер пикселя X1, для которого значение Н становится положительным, максимальное положительное значение Hm, номер пикселя Х2, после которого значение Н в текущей строке не является положительным, а так же номер текущей строки Y. Записывают в память X1, Hm, X2,Y. Обрабатывают следующую строку матрицы и определяют в ней значения X1, Hm, X2,Y. В случае превышения величины Hm значения, записанного для предыдущей строки, перезаписывают в память новые значения X1, Hm, X2,Y.
По окончании обработки сигналов всех строк матрицы определяют координаты цели как (Х1+Х2)/2 и Y и выдают соответствующие управляющие сигналы на исполнительные устройства носителя.
Способ наведения на воздушную цель при яркости цели меньше яркости окружающего ее фона аналогичен описанному ранее способу наведения на воздушную цель при яркости цели превышающей яркость окружающего ее фона.
Регистрация и запись сигналов от пикселей фоточувствительной матрицы, регистрирующей текущее изображение, происходит так же, как и при яркости цели превышающей яркость окружающего ее фона, как было описано ранее.
На фиг. 3 показана кривая 5 уровня сигналов от пикселей в одной строке матрицы в зависимости от номера пикселя в строке этой матрицы. Где X - номер пикселя в Y - строке матрицы, Н - уровень сигнала от пикселя.
В текущей строке проводят усреднение значения сигналов от каждого пикселя с заданного количества окружающих его пикселей. В результате получают кривую 6 на фиг. 3.
Полученные усредненные значения сигналов уменьшают на заданную величину. В результате получают кривую 9 на фиг. 3.
Для каждого пикселя из полученных уменьшенных усредненных значений сигналов на кривой 9 вычитают значения сигналов на кривой 5, как показано на фиг. 3. Полученным значениям разности этих сигналов соответствует кривая 10 на фиг. 3. Это кривая текущей строки.
Начиная с начала текущей строки, определяют номер пикселя X1, для которого значение Н становится положительным, максимальное положительное значение Hm, номер пикселя Х2, после которого значение Н в текущей строке не является положительным, номер текущей строки Y. Далее существенные признаки для целей большей и меньшей яркости совпадают.
Таким образом, данный способ обеспечивает получение технического результата - ускорение обработки изображений, получаемых ОГС непосредственно во время приема изображений, что позволяет ускорить поиск воздушного объекта. Кроме того данный способ снижает вычислительную нагрузку устройства обработки сигнала, уменьшает количество операций сохранения и передачи массивов данных, что в совокупности приводит к миниатюризации блока обработки 4 и самой ОГС.
Получаемые при обработке изображений значения X1 и Х2 соответствуют габаритам цели 2 по горизонту, что позволяет определять дистанцию до цели 2. При достижении значения (Х2-Х1) заданной величины блок обработки 4 выдает соответствующий управляющий сигнал на исполнительные устройства носителя о достижении заданной дистанции до цели 2 известного размера.
Определяемые при обработке изображений для разных строк минимальное Y1 и максимальное значения Y2 строк, вне которых нет положительных значений Н, соответствуют габаритам цели 2 по вертикали. Это позволяет определять расстояние до цели 2. При достижении значения (Y2-Y1) заданной величины блок обработки 4 выдает соответствующий управляющий сигнал на исполнительные устройства ОГС о достижении заданной дистанции до воздушной цели 2 известного размера.
Таким образом, обеспечивается решение задачи выдачи сигнала при достижении заданной дистанции от ОГС до воздушной цели 2 известных размеров.
В том случае, если яркость цели 2 меньше яркости окружающего ее фона, то выбрасываемые целью маскировки световые ловушки не могут дать в разностной кривой 10 на рис. 3 пиксели с положительным значением разности.
Таким образом, становится возможным определение координат цели 2 в случае выброса ею световых ловушек.
В случае маскировки цели 2 ее изображение может представлять собой набор светлых и темных пятен. В этом случае производится обработка матрицы как светлой, так и темной частей цели 2 параллельно. Результаты обработки суммируются.
В случае известности исходной информации о степени яркости цели 2 до начала работы ОГС, в блоке обработки 4 могут не учитываться те цели, значение яркости которых выходят за заданный диапазон. Таким образом, можно исключить наведение на цели в виде сверхярких источников, например, на солнце.
Это позволяет данным способом получать технический результат в виде повышения устойчивости к применению маскировки цели, срабатывания на все цели, которые и темнее и светлее фона.
Промышленная применимость
Наиболее эффективно выглядит использование предложенного способа в приборах самонаведения, авиационной, космической и ракетостроительной промышленности. Рассмотренный вариант выполнения изобретения может быть реализован на существующем в настоящее время оборудовании с использованием имеющихся материалов. Это показывает его работоспособность и подтверждает промышленную применимость.
Способ получения импульсов тормозного излучения со сложными амплитудно-временными параметрами и устройство для его осуществления
Устройство для герметичного прохода кабельных линий через стенку
Стенд для ударных испытаний высокоскоростных объектов
Способ автоматической сварки неплавящимся электродом
Оптическая система для фокусировки излучения
Способ изготовления термостойкого наполненного пенопласта высокой плотности
Устройство защиты от кумулятивной струи и осколков взрыва
Устройство для намотки канатов диаметром до 0,5 миллиметров
Способ герметизации блока охлаждения активного элемента в твердотельном лазере
Плазменный прерыватель тока
Способ фиксации и сброса грузов для беспилотных летательных аппаратов
Катапульта для запуска беспилотного летательного аппарата

