Результат интеллектуальной деятельности: Способ пространственной ориентации микроспутника
Вид РИД
Изобретение
Изобретение относится к управлению ориентацией космического аппарата.
Известен способ поддержания трехосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой [1]. Недостатком является необходимость периодически разгружать гироскопические устройства при раскрутки их до максимальных оборотов, что приводит к затратам бортовых запасов реактивного топлива.
Цель изобретения - создание системы пространственной ориентации микроспутника.
Техническим результатом является разработка системы управления пространственной ориентацией микроспутника на орбите за счет использования подвижных рычагов с изменяемыми моментами инерции.
Указанный технический результат достигается тем, что по трем осям микроспутника устанавливаются отклоняемые рычаги с продольно перемещаемыми грузиками, причем при размещении грузиков на концах рычагов их момент инерции максимален, и отклонение рычагов в этом случае приводит к большему развороту микроспутника в противоположную сторону, чем при размещении грузиков у основания рычагов. В последнем случае - при минимальном моменте инерции рычагов – их обратное отклонение в исходное (относительно микроспутника) положение приводит к меньшему обратному развороту микроспутника. Таким образом, можно постепенно повернуть микроспутник в любом направлении без раскрутки гироскопов и необходимости их последующей разгрузки, как в традиционных системах ориентации [1].
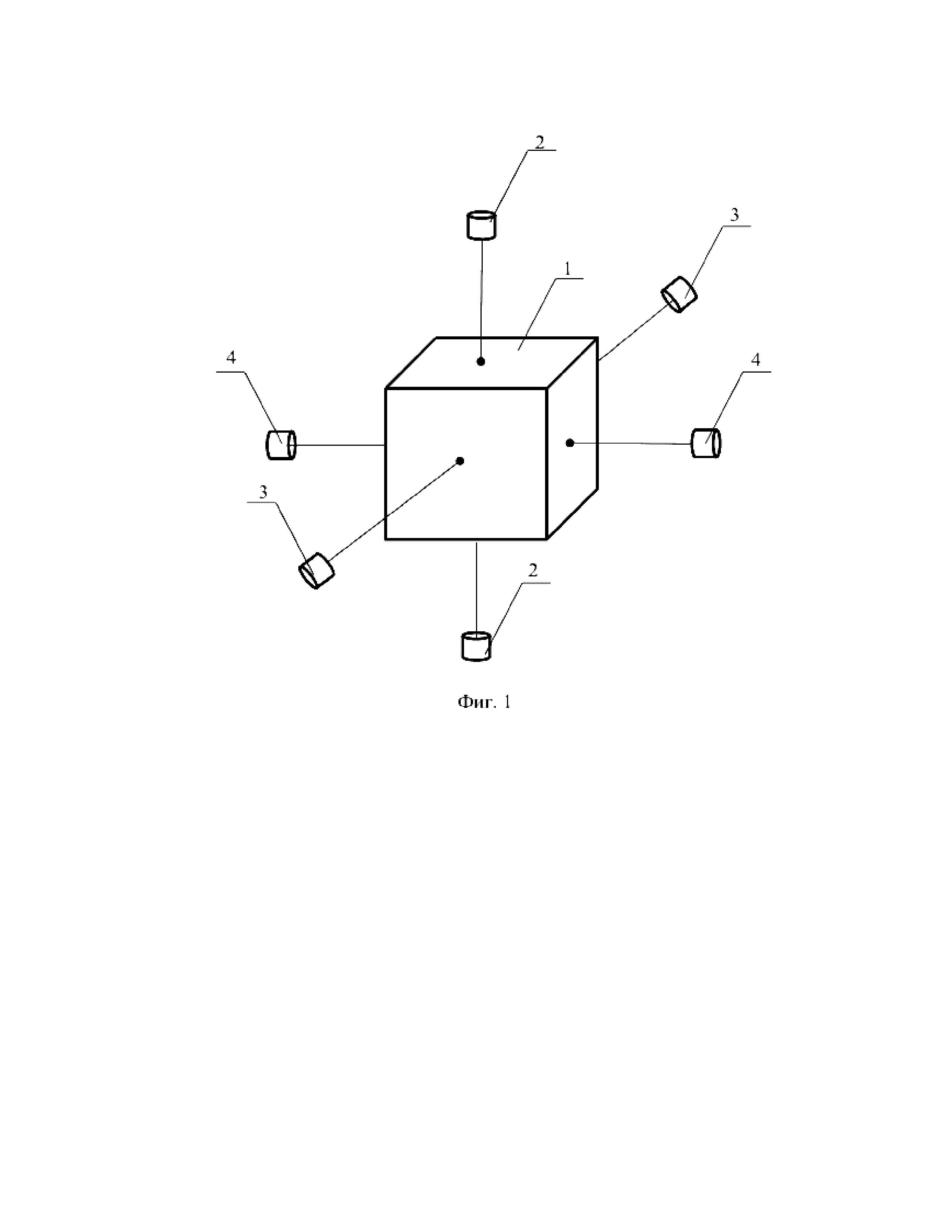
На фиг. 1 изображена структурная схема для реализации способа пространственной ориентации микроспутника.
Микроспутник 1 по трем осям имеет наклонные рычаги с изменяемым моментом инерции за счет перемещения грузиков 2 по оси Z, грузиков 3 по оси Y и грузиков 4 по оси X.
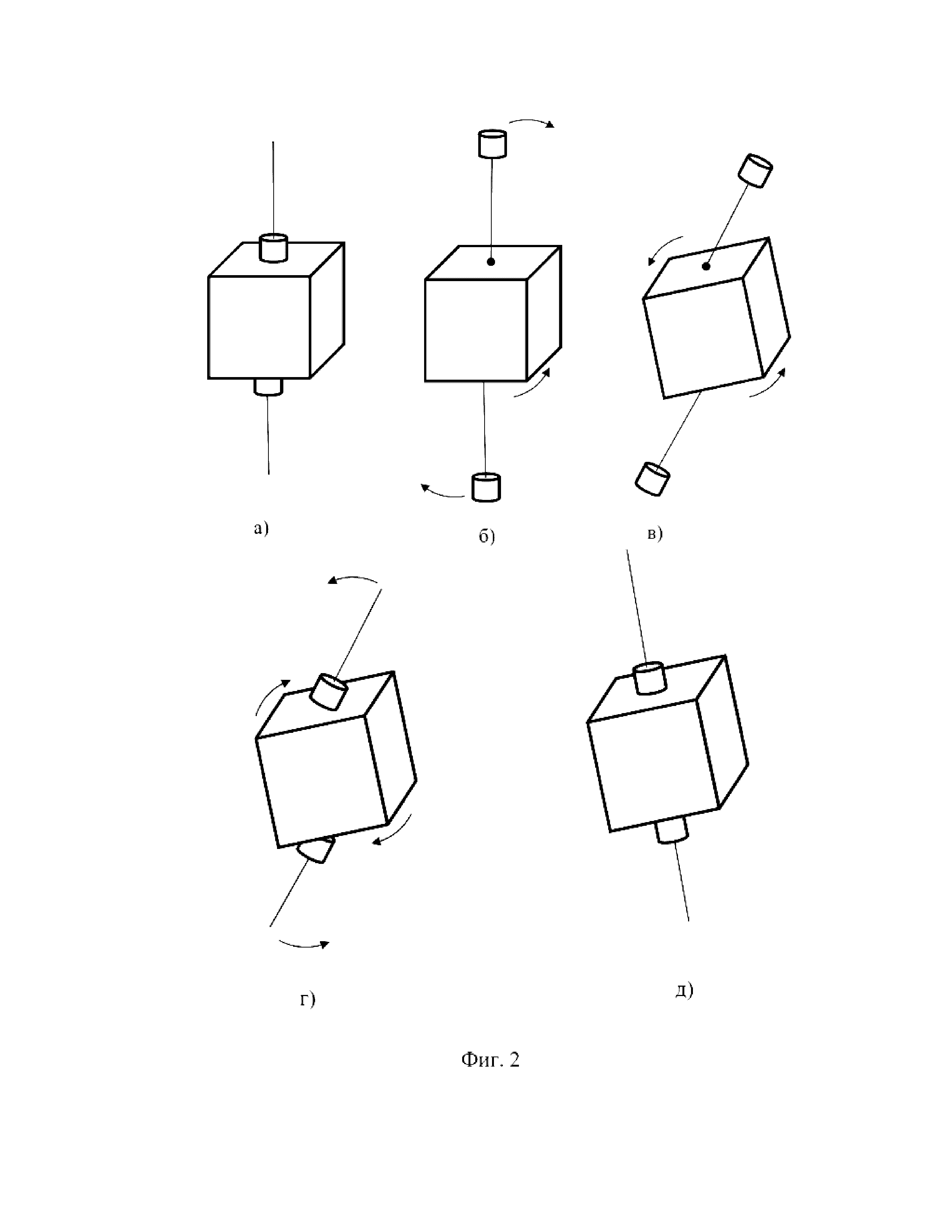
На фиг. 2 представлен алгоритм вращения микроспутника вокруг одной из трех осей. На фиг. 2, а приведено исходное положение микроспутника, рычагов и грузиков. На фиг. 2, б грузики перемещаются на максимальное расстояние от микроспутника, увеличивая момент инерции рычагов. После этого рычаги совершают наклон в одном направлении, придавая вращательное движение микроспутнику в противоположном направлении. Чем больше момент инерции рычагов по сравнению с моментом инерции микроспутника, тем на больший угол будет повернут микроспутник. На фиг. 2, в отображено завершение маневра вращения. На фиг. 2, г изображено, как грузики смещаются к основанию рычагов для уменьшения момента инерции. После этого рычаги совершают поворот в исходное вертикальное (относительно микроспутника) положение. При этом микроспутник совершит вращение в противоположную сторону, но поворот будет совершен на меньший угол, так как момент инерции рычагов значительно уменьшился. На фиг. 2, д изображено новое исходное положение микроспутника, в котором он сориентирован в пространстве в новой позиции. Этот алгоритм может быть многократно повторен для достижения нужной ориентации микроспутника в выбранной плоскости. Аналогично микроспутник может быть повернут по двум остальным направлениям.
Способ пространственной ориентации микроспутника позволяет уменьшить весогабаритные параметры системы ориентации по сравнению с гироскопической системой, при сохранении достаточной точности и энергоэффективности, преимущественно малых и медленных разворотов спутника.
Литература
1. Способ поддержания трехосной ориентации космического аппарат с силовыми гироскопами и целевой нагрузкой. Патент RU 2356802 C2, (45) Опубл. 27.05.2009.
Способ формирования эллиптической диаграммы направленности цифровой активной фазированной антенной решетки на базе "стаи" микроспутников с применением сверхрегенеративных приемопередающих устройств
Полупроводниковая солнечная батарея на основе концентратора из фоточувствительных зеркальных полупрозрачных металлических электродов с использованием термоэлектрического преобразования
Каскадное светоизлучающее термоэлектрическое устройство
Светотранзистор с высоким быстродействием
Тепловая труба с применением трубчатых оптоволоконных структур
Энергоэффективное охлаждающее устройство
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе диодов ганна
Способ отвода тепла от тепловыделяющих электронных компонентов на основе применения полупроводниковых лазеров
Светотиристор
Способ отвода тепла от тепловыделяющих электронных компонентов в виде электромагнитной энергии на основе туннельных диодов
Устройство охлаждения на основе нанопленочных термомодулей
Термоэлектрический генератор с высоким градиентом температур между спаями

