Результат интеллектуальной деятельности: Устройство для захвата плавучего фала автономным необитаемым подводным аппаратом
Вид РИД
Изобретение
Изобретение относится к средствам захвата плавучих средств в море, преимущественно автономных необитаемых подводных аппаратов (АНПА) для последующего подъема их на борт обеспечивающего судна.
Известен малогабаритный АНПА «Hugin-3000» (Г.Ю. Илларионов, К.С. Сиденко, Л.Ю. Бочаров, Угроза из глубины: 21 век. - Хабаровск: КГУП «Хабаровская краевая типография», - 2011. 197 с, ил. с. 198-200), в котором для его захвата предусмотрена отделяемая плавающая носовая часть, связанная с АНПА посредством подъемного фала с положительной плавучестью. Для выполнения операции захвата носовая часть отстреливается от аппарата на несколько метров в сторону и выполняет роль буйка, связанного подъемным фалом с АНПА. С борта обеспечивающего корабля оператор выстреливает пневматический гарпун, прикрепленный к тросу лебедки спускоподъемного устройства. Крюк гарпуна зацепляется за подъемный фал АНПА, свободно плавающий между АНПА и его отстреленной носовой частью. Затем АНПА за подъемный трос втягивается на сходни, сходни поднимаются и убираются на борт.
К недостаткам данного технического решения следует отнести то, что для выполнения технологии забрасывания гарпуна обеспечивающему судну необходимо подойти к всплывшему АНПА на расстояние 50-100 метров. При волнении моря свыше 5 баллов высока вероятность повреждения гарпуном корпуса АНПА и установленной на нем аппаратуры, а также необходимость выполнения многократных попыток осуществления зацепа подъемного троса гарпуном. Операция требует непосредственного участия человека (группы людей). Кроме того, последующие пуски АНПА требуют дополнительных манипуляций: заправка фала в аппарат и установка на место носовой части. Также следует отнести к основным недостатками и низкую надежность технического средства за счет резкого ограничения возможности его применения при увеличении волнения моря, необходимость сложного маневрирования обеспечивающего судна для осуществления прицельного выстрела гарпуном и необходимость участия обслуживающего персонала в палубных операциях по захвату и приемке АНПА.
Известен также автономный необитаемый подводный аппарат «SeaCat» (http://www.seacat-auv.com/), на корпусе которого в его диаметральной плоскости жестко установлено захватное средство в виде однолапковой скобы. Незакрепленный к корпусу АНПА конец однолапковой скобы выполнен в виде удлиненного и ориентированного по ходу движения АНПА вперед захватного элемента- выступа, направленного под углом вверх от продольной оси корпуса с образованием между поверхностью корпуса и выступом щели для обеспечения прохода плавучего захватного фала непосредственно внутрь однолапковой скобы.
Операция захвата АНПА «SeaCat» и подъема его на борт обеспечивающего судна выполняется посредством судового грузоподъемного крана по командам оператора при непосредственном участии экипажа судна. Предварительно свободный конец троса грузоподъемного крана оснащается самоблокирующимся крюком, к носику которого крепится плавучий захватный фал, а другой его конец удерживается на борту судна членами команды участвующей в операции. По команде оператора включается в работу грузоподъемный кран и его стрелу выносят (поворачивают) за борт обеспечивающего судна до тех пор, пока конец грузовой стрелы с висящем на его грузовом тросе самоблокирующимся крюком не будут расположены на расстоянии как минимум 5 метров от борта судна. Затем, по команде оператора, опускается самоблокирующийся крюк, закрепленный на конце грузового троса, фиксирует его положение в непосредственной близости от поверхности воды и придерживает его в таком положении. Одновременно члены команды опускают плавучий захватный фал на поверхность воды от самоблокирующегося крюка до корпуса судна и удерживают его в таком положении. Далее, оператор направляет АНПА в надводном положении курсом вдоль борта обеспечивающего судна между висящем на грузовом тросе самоблокирующимся крюком. Двигаясь таким курсом, АНПА проплывает под лежащим на поверхности воды плавучим захватным фалом, который и захватывается захватным элементом - выступом АНПА и через щель в однолапковой скобе захватный фал попадает во внутрь самой однолапковой скобы. Захват АНПА осуществлен и его движение останавливают. Затем, экипаж судна вручную, посредством захватного фала, втягивают носик самоблокирующегося крюка внутрь однолапковой скобы, а затем и весь крюк. С окончанием операции подвеса АНПА на самоблокирующимся крюке он автоматически закрывается и АНПА грузоподъемным краном поднимают на борт обеспечивающего судна.
Недостатки данного известного захватного устройства заключаются в том, что для захвата и последующего подъема АНПА на борт обеспечивающего судна необходимо с помощью кормового движителя АНПА и его подруливающего устройства позиционировать АНПА в непосредственной близости у борта обеспечивающего судна. Волнение моря более 3 баллов уже представляет значительные неудобства экипажу: возникает риск повредить АНПА о борт судна, у оператора возникают трудности в осуществлении визуального контроля за операцией захвата АНПА и подъема его на борт судна, а у экипажа - в части позиционирования захватного фала, захвата АНПА за захватный фал и подвеса АНПА за самоблокирующийся крюк для подъема АНПА на борт судна.
Таким образом, использование установленного на АНПА «SeaCat» захватного устройства, в целом, снижают надежность выполнения операции захвата и подъема АНПА на борт обеспечивающего судна при увеличении волнения моря, необходимости выполнения оператором сложного маневрирования самим АНПА, а также необходимости непосредственного участия членов экипажа судна в палубных операциях по захвату и подъему АНПА на борт судна.
Наличие подобных недостатков у известных технических устройств обусловливает актуальность и необходимость разработки нового конструктивного решения устройств захвата и подъема подводных аппаратов на борт обеспечивающего судна.
В основу изобретения поставлена задача создать устанавливаемое стационарно непосредственно на АНПА автоматизированное устройство захвата плавучего фала с интеграцией его в систему управления самого АНПА, обеспечивающее снижение риска повреждения АНПА в процессе выполнения операции его захвата на плавучий фал в условиях волнения моря, повышение надежности выполнения операции захвата АНПА на плавучий фал в аналогичных условиях и исключение непосредственного участия в операции захвата АНПА членов экипажа обеспечивающего судна.
Поставленная задача решается тем, что в устройстве для захвата плавучего фала автономным необитаемым подводным аппаратом, содержащем снабженное захватным элементом захватное средство, которое жестко установлено на корпусе подводного аппарата в его диаметральной плоскости, а его захватный элемент ориентирован вперед по ходу движения подводного аппарата, при этом захватное средство установлено в носовой части корпуса подводного аппарата, интегрировано в его систему управления и выполнено в виде снабженного электроприводом захватного механизма, содержащего корпус, в верхней части которого, с возможностью поворота, на оси установлен двуплечий рычаг, а вдоль продольной оси корпуса, в нижней его части, установлены параллельно друг другу ходовой винт и направляющая, причем на ходовом винте, подключенном к электроприводу, размещена ходовая гайка с возможностью линейного перемещения вдоль направляющей, при этом ходовая гайка шарнирно соединена с нижним плечом рычага и в каждом ее торце установлен постоянный магнит, а на корпусе соответственно установлены концевые бесконтактные датчики положения ходовой гайки, захватный элемент выполнен на верхнем плече рычага в виде крюка, окончание которого снабжено ловителем плавучего фала, выполненным в виде удлиненной пластины, повторяющей контур обвода носовой части корпуса подводного аппарата, на боковых поверхностях крюка на оси установлены маятники в виде фигурных пластин, в нижней части которых закреплены постоянные магниты, а на корпусе соответственно установлены концевые бесконтактные датчики положения маятников крюка.
Фигурные пластины маятников выполнены в виде изогнутой пластины, повторяющей форму крюка.
Указанная совокупность отличительных существенных признаков заявленного устройства для захвата плавучего фала автономным необитаемым подводным аппаратом, характеризующая конструктивное выполнение указанного устройства и функциональные связи этих конструктивных элементов, позволили создать работоспособное автоматизированное устройство для захвата плавучего фала и возможность его интеграции в систему управления подводным аппаратом.
Такое конструктивное выполнение устройства для захвата плавучего фала позволило выполнять процесс захвата последнего посредством самого подводного аппарата по командам оператора с борта обеспечивающего судна, осуществляя при этом визуальный контроль или в автоматическом режиме по программе, заложенной в систему управления подводного аппарата, и исключить непосредственное участие членов экипажа из процесса захвата плавучего фала.
Размещение устройства для захвата плавучего фала на носовой части корпуса подводного аппарата повышает надежность выполнения процесса захвата плавучего фала в условиях волнения моря за счет увеличения вероятности попадания плавучего фала в створ захватного крюка, так как носовая часть подводного аппарата и плавучий фал, в непосредственной близости к нему, практически синхронно, отрабатывают свое положение на поверхности воды в условиях волнения моря. Этому же способствует и установленный на оконечности захватного крюка ловитель плавучего фала, выполненный в виде удлиненной пластины, повторяющей контур обвода носовой части контура подводного аппарата, в случае если нарушится такая синхронность между положением носовой оконечности подводного аппарата и положением плавучего фала на поверхности моря в условиях усиливающегося волнения.
Поскольку процедура стыковки и захвата плавучего фала подводным аппаратом, плавающим на поверхности моря осуществляется на значительном расстоянии от обеспечивающего судна в условиях, когда один конец плавучего фала с буйком на конце выпускается с его борта и буксируется малым ходом вытянутым в одну линию, исключается риск повреждения подводного аппарата при выполнении такого захвата плавучего фала.
На практике бывают обстоятельства, когда стыковку и захват плавучего фала подводным аппаратом целесообразнее выполнять с обеспечивающего судна лежащего в дрейфе. В этом случае один конец плавучего фала с буйком на конце также выпускают с борта обеспечивающего судна, а морское течение и ветер относят фал от судна на значительное расстояние, вытягивают фал на поверхности моря практически в одну линию. Поэтому процедура стыковки и захвата плавучего фала осуществляется также на большом расстоянии от судна, а риск повреждения подводного аппарата исключается даже в условиях волнения моря.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Указанные существенные признаки, отличающие заявленное устройство для захвата плавучего фала подводного аппарата от прототипа, в совокупности с признаками общими для него и прототипа, обеспечивают достижение заявленного технического результата во всех случаях, на которые распространяется объем правовой охраны.
Сущность изобретения поясняется чертежами, где:
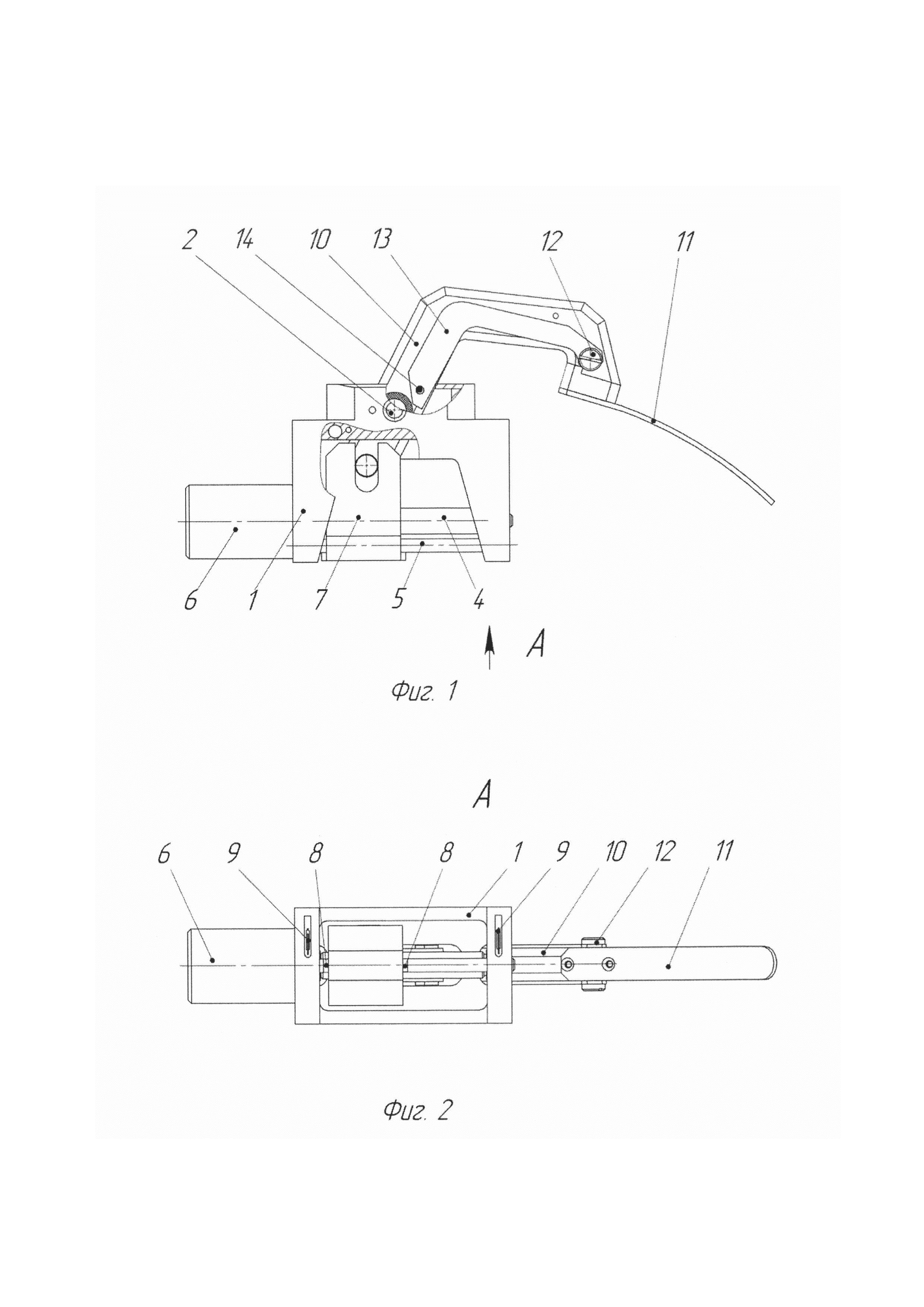
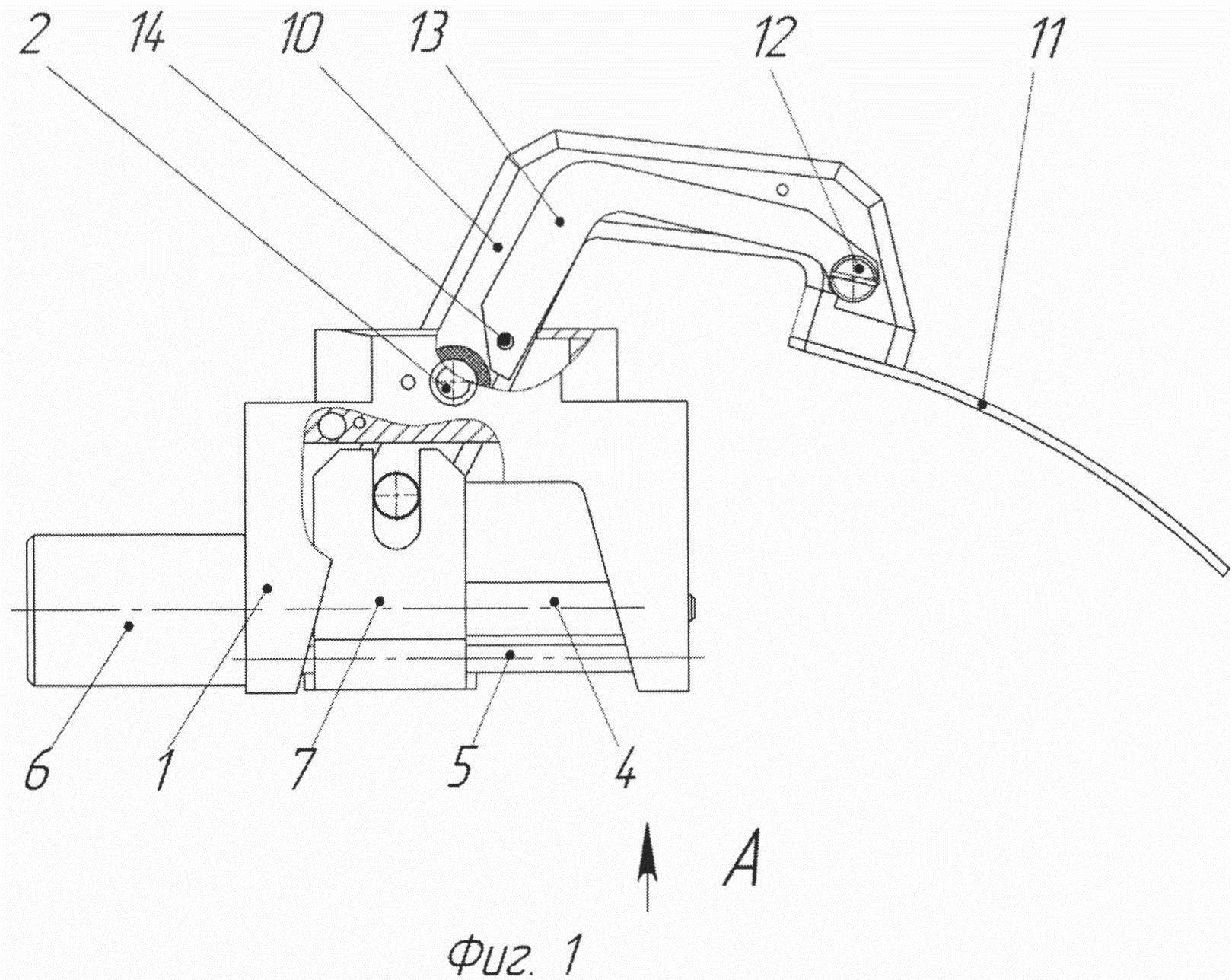
- на фиг. 1 представлен общий вид устройство для захвата плавучего фала-вид сбоку.
- на фиг. 2 представлен общий вид устройство для захвата плавучего фала-вид снизу.
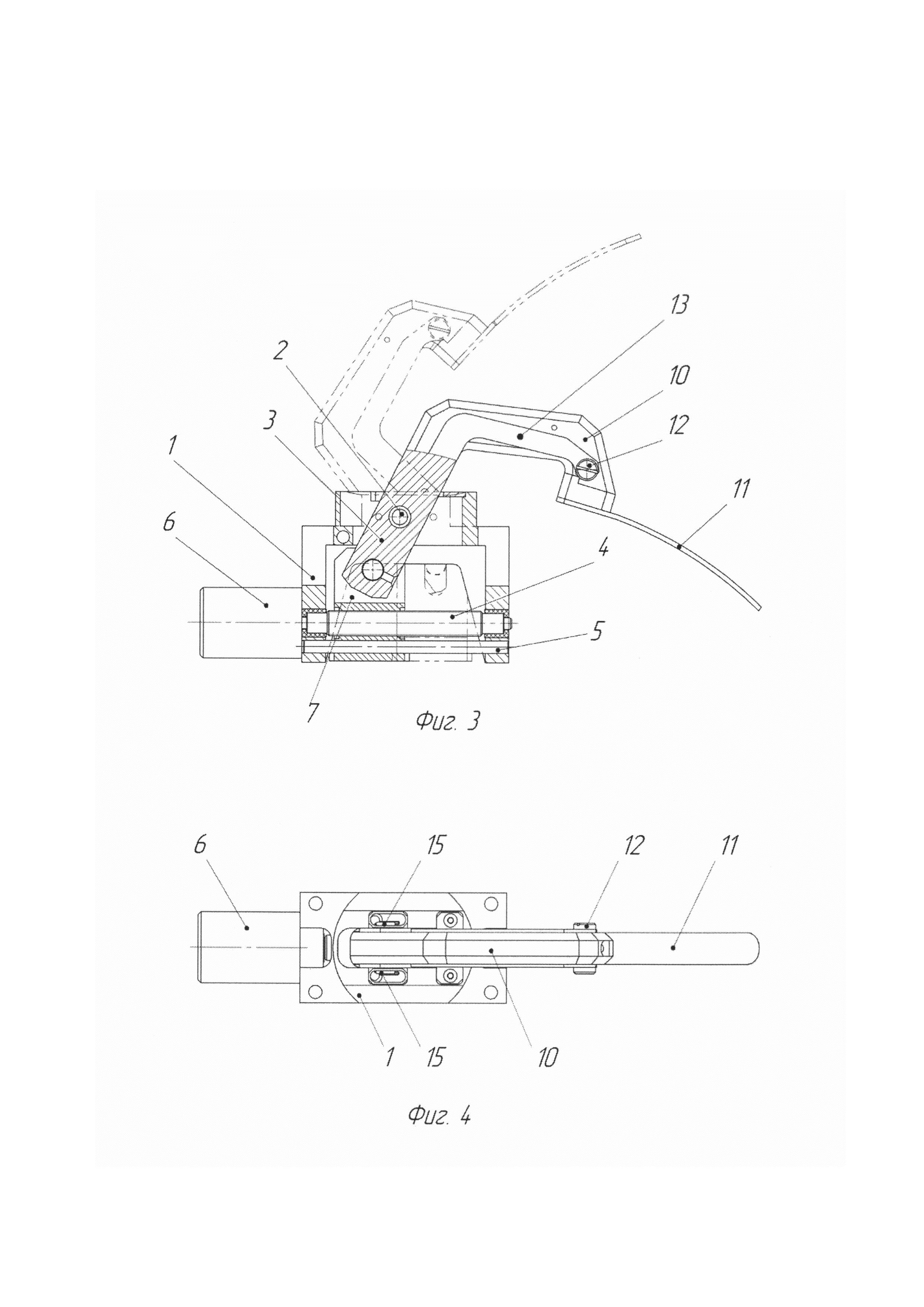
- на фиг. 3 представлен продольный разрез устройство для захвата плавучего фала;
- на фиг. 4 представлен общий вид устройство для захвата плавучего фала - вид сверху.
- на фиг. 5 показано устройство для захвата плавучего фала, установленное в носовой части корпуса подводного аппарата;
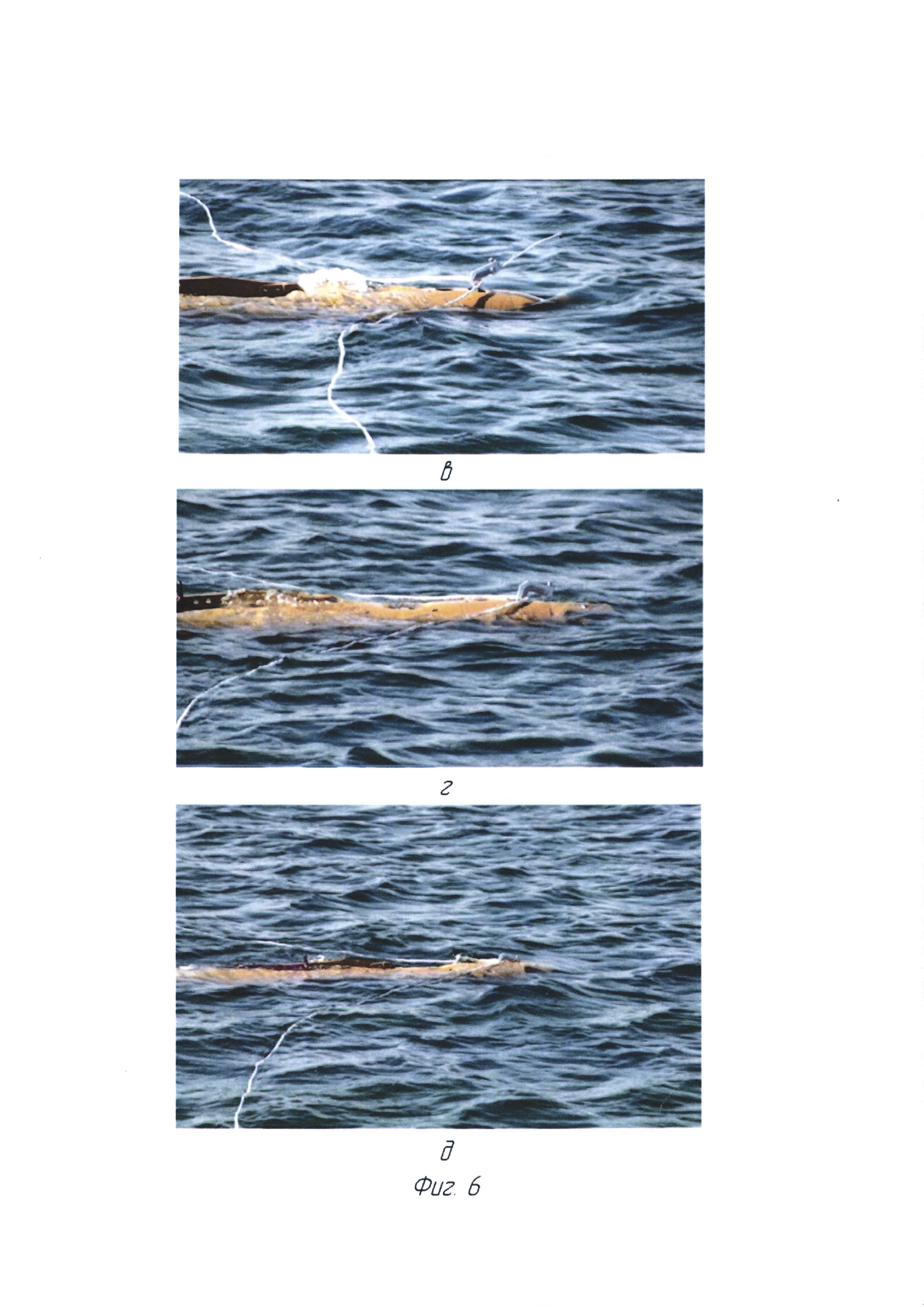
- на фиг. 6. показаны фотографии этапов морских испытаний устройства для захвата плавучего фала, установленном на подводном аппарате.
Устройство для захвата плавучего фала автономным необитаемым подводным аппаратом жестко установлено в носовой части корпуса подводного аппарата в его диаметральной плоскости и выполнено в виде захватного механизма, которое содержит корпус 1. В верхней части корпуса 1 с возможностью поворота, на оси 2 установлен двуплечий рычаг 3, а вдоль продольной оси корпуса 1, в нижней его части, установлены параллельно друг другу ходовой винт 4 и направляющая 5, причем на ходовом винте 4, подключенном к электроприводу 6, размещена ходовая гайка 7 с возможностью линейного перемещения вдоль направляющей 5. Ходовая гайка 7 шарнирно соединена с нижним плечом рычага 3 и в каждом ее торце установлен постоянный магнит 8. На корпусе 1 соответственно установлены концевые бесконтактные датчики 9 положения ходовой гайки 7.
Захватный элемент выполнен на верхнем плече рычага 3 в виде крюка 10, окончание которого снабжено ловителем 11 плавучего фала, выполненным в виде удлиненной пластины, повторяющей контур обвода носовой части корпуса подводного аппарата. На боковых поверхностях крюка 10 на оси 12 установлены маятники 13 в виде фигурных пластин, в нижней части которых закреплены постоянные магниты 14, а на корпусе 1 соответственно установлены концевые бесконтактные датчики 15 положения маятников 10 крюка.
Такое конструктивное выполнения устройства для захвата плавучего фала АНПА позволило интегрировать его в систему управления подводным аппаратом и выполнять процесс захвата посредством последнего по командам оператора с борта обеспечивающего судна или в автоматическом режиме по программе, заложенной в систему управления подводным аппаратом.
Дополнительно на чертежах изображены:
16 - подводный аппарат;
17 - плавучий фал.
Работа устройства для захвата подводным аппаратом плавучего фала осуществляется следующим образом.
С борта обеспечивающего судна по команде оператора спускают на заданную длину плавучий фал 17, свободный конец которого снабжен поплавком, и буксируют его. На подводный аппарат, находящийся на поверхности воды, оператором подается команда двигаться наперерез плавучему фалу 17 и сигнал на открытие захватного механизма. Включается в работу электропривод 6, который вращает ходовой винт 4 до тех пор, пока гайка 7 не достигнет крайнего положения (сработает концевой датчик 9). При этом крюк 10 займет вертикальное положение (положение «открыто») (фиг. 6а). Маятники 13 под действием силы тяжести выйдут в рабочее положение и упрутся в выступ корпуса 1 механизма. Далее аппарат пересекает стыковочный фал 17, который при этом попадает в створ крюка 10 (фиг. 6б) (при волнении ловитель 11 плавучего фала препятствует проскакиванию плавучего фала над аппаратом). Далее аппарат продолжает движение и плавучий фал 17 при этом отклоняет маятники 13 (или один маятник в зависимости от угла, под которым подводный аппарат пересекает плавучий фал 17). При определенном угле отклонения маятника 13 установленный на нем магнит 14 воздействует на магнитный датчик 15 положения маятника 13. Для предотвращения ложных срабатываний при случайном кратковременном отклонении маятника 13 (волна, посторонние предметы) программно задано определенное время воздействия магнита маятника 13 на магнитный датчик 15 (время, в течение которого подводный аппарат движется, натягивая крюком 10 плавучий фал 17) (фиг. 6в). По истечению заданного времени на блок (на чертеже не показан) управления электроприводом 6 подается сигнал закрытия крюка 10, включается электропривод 6, вращается ходовой винт 4, по которому двигается гайка 7, смещающая крюк 10 в положение «закрыто» (фиг. 6г). Гайка 7 движется до момента срабатывания концевого бесконтактного датчика 9, а крюк занимает крайнее положение «закрыто» (фиг. 6д). Захватив плавучий фал, подводный аппарат останавливает свое движение и далее выполняются необходимые операции по его подъему на борт обеспечивающего судна.
В ходе проведения лабораторных и морских испытаний была подтверждена работоспособность устройства для захвата плавучего фала автономным необитаемым подводным аппаратом плавучего фала и выполнена поставленная задача, а, следовательно, достигнут необходимый технический результат.
Устройство для захвата плавучего фала автономным необитаемым подводным аппаратом, содержащее снабженное захватным элементом захватное средство, которое жестко установлено на корпусе подводного аппарата в его диаметральной плоскости, а его захватный элемент ориентирован вперед по ходу движения подводного аппарата, отличающееся тем, что захватное средство установлено в носовой части корпуса подводного аппарата, интегрировано в его систему управления и выполнено в виде снабженного электроприводом захватного механизма, содержащего корпус, в верхней части которого с возможностью поворота на оси установлен двуплечий рычаг, а вдоль продольной оси корпуса в нижней его части установлены параллельно друг другу ходовой винт и направляющая, причем на ходовом винте, подключенном к электроприводу, размещена ходовая гайка с возможностью линейного перемещения вдоль направляющей, при этом ходовая гайка шарнирно соединена с нижним плечом рычага и в каждом ее торце установлен постоянный магнит, а на корпусе соответственно установлены концевые бесконтактные датчики положения ходовой гайки, захватный элемент выполнен на верхнем плече рычага в виде крюка, окончание которого снабжено ловителем плавучего фала, выполненным в виде удлиненной пластины, повторяющей контур обвода носовой части корпуса подводного аппарата, на боковых поверхностях крюка на оси установлены маятники в виде фигурных пластин, в нижней части которых закреплены постоянные магниты, а на корпусе соответственно установлены концевые бесконтактные датчики положения маятников крюка.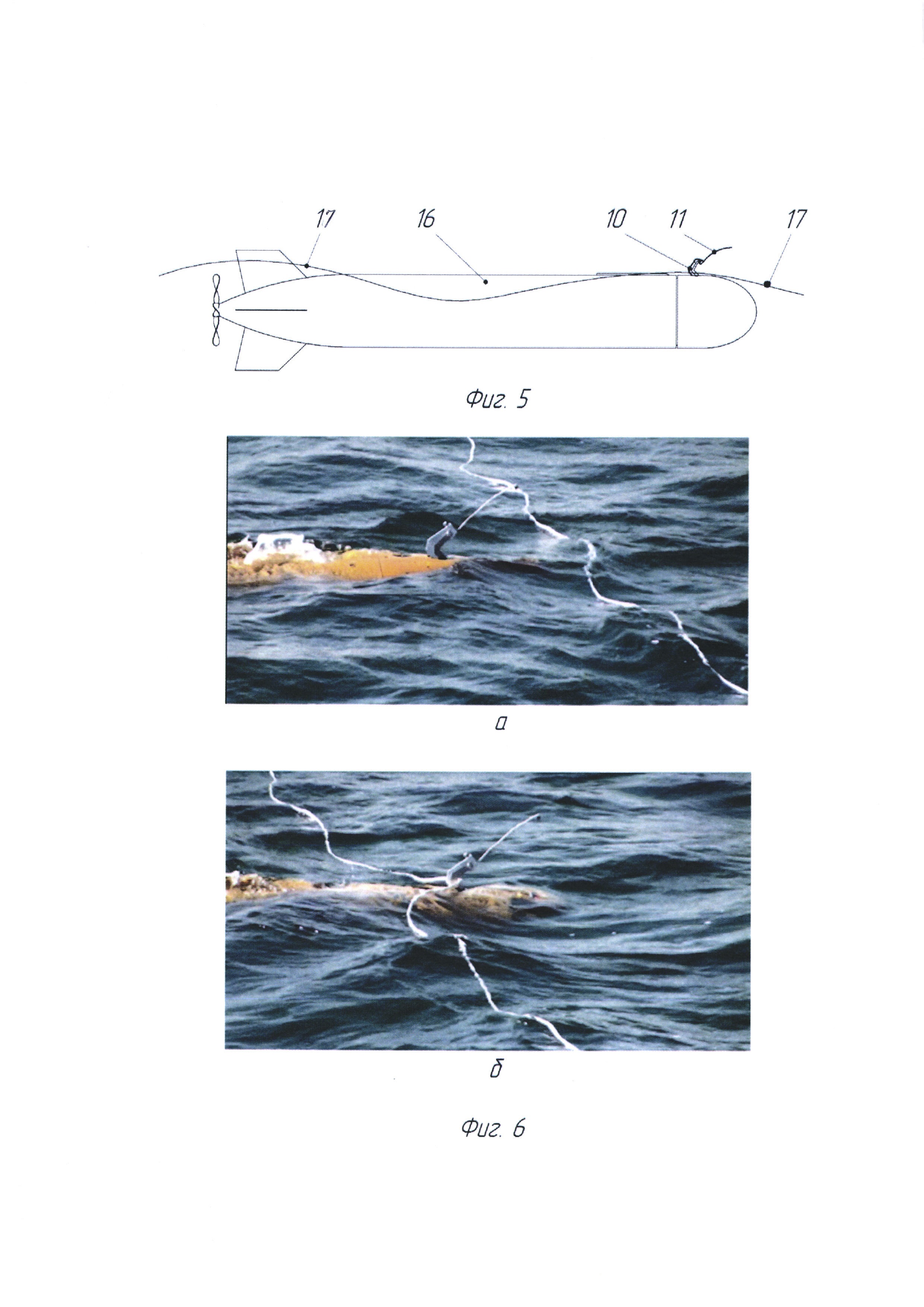
Способ изготовления цилиндрической оболочки прочного корпуса подводного аппарата из стеклометаллокомпозита
Способ изготовления цилиндрической оболочки прочного корпуса подводного аппарата из стеклометаллокомпозита
Устройство для бесконтактной передачи электроэнергии на подводный объект (варианты)
Способ изготовления листового стеклометаллокомпозита
Спускоподъемное устройство
Способ профилирования донных отложений
Способ профилирования донных отложений
Устройство для зарядки аккумуляторной батареи
Гидроакустический комплекс для обнаружения движущегося заглубленного источника звука и измерения его координат в мелком море
Устройство для зарядки аккумуляторной батареи подводного объекта
Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки

