Результат интеллектуальной деятельности: ДАЛЬНОМЕРНОЕ УСТРОЙСТВО
Вид РИД
Изобретение
Изобретение относится к лазерной технике, а именно к лазерным дальномерным устройствам с несоосными приемными и передающими каналами.
Известно устройство измерения расстояния с использованием полупроводникового лазера [Патент США №5241360, МКИ G01C 3/08, НКИ 356/5, опубликовано 31.08.1993]. Устройство содержит излучатель, состоящий из полупроводникового источника, электрически связанного с ним модулятора и оптически связанного с ним коллиматора; приемник излучения, состоящий из фотоприемника, электрически связанной с ним схемы обработки сигналов и оптически связанной с ним собирающей линзы; устройство управления, электрически связанное с модулятором и схемой обработки сигналов.
Измерение расстояния с помощью этого устройства может осуществляться за счет использования в качестве фотоприемника лавинного фотодиода, обеспечивающего большое усиление сигнала и имеющего небольшую чувствительную площадь. В предпочтительном осуществлении изобретения применяется "бинокулярная оптическая система", т.е. такая, в которой оптические оси передающего и приемного каналов пространственно разнесены.
Известно, что в схеме с разнесенными параллельными осями приемного и передающего каналов при изменении расстояния от дальномера до объекта изображение пятна лазерного излучения в плоскости фотоприемника будет смещаться [Патент Японии №4-67606, МКИ G01C 3/06, опубликовано 28.10.1992, "Изобретения стран мира", выпуск 82, 1994, БИ №15-16, с. 32], поэтому, начиная с некоторого расстояния L0, при приближении объекта к дальномеру оптический сигнал на площадке приемника будет отсутствовать вследствие того, что поле зрения приемного канала не пересекается с лазерным лучом, и измерение расстояния становится невозможным.
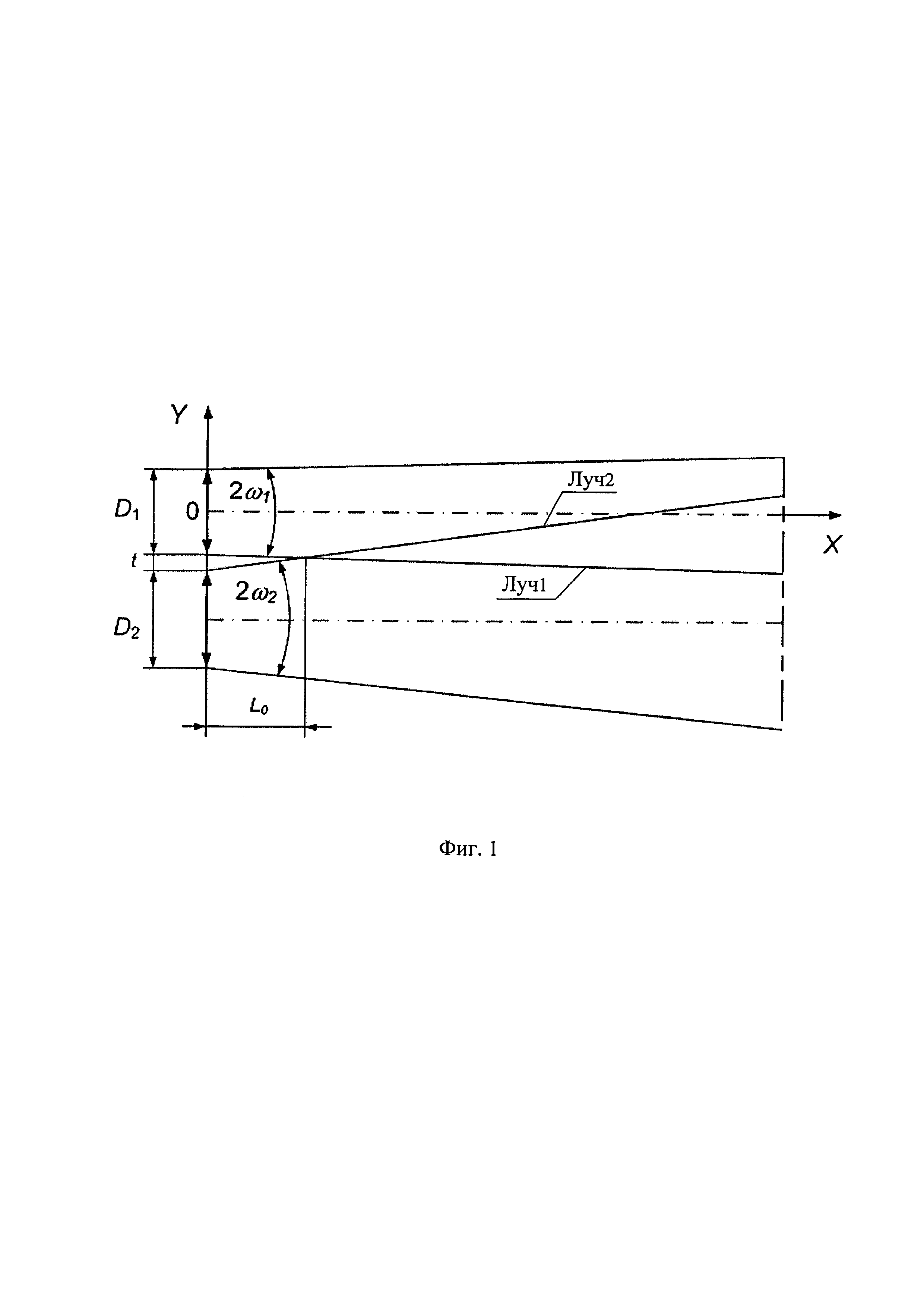
Оценим величину теневой зоны L0, для этого обратимся к фиг. 1, на которой изображены коллиматор лазерного излучателя дальномерного устройства диаметром D1 и приемный объектив диаметром D2, расположенный на расстоянии t от коллиматора. Расходимости лазерного излучения и поля зрения приемного канала 2ω1 и 2ω2 соответственно, при этом оптические оси лазерного излучателя и приемного канала параллельны. Выберем за начало координат центр коллиматора лазерного излучателя. Для нахождения длины L0 теневой зоны достаточно найти х-координату точки пересечения крайних внутренних лучей лазерного излучения (луч 1) и поля зрения приемного канала (луч 2). Запишем уравнения для лучей 1 и 2 соответственно в выбранной системе координат:


Для нахождения х-координаты точки пересечения лучей достаточно воспользоваться следующим соотношением [Цыпкин А.Г., Цыпкин Г.Г. Математические формулы. Алгебра. Геометрия. Математический анализ: Справочник. - М.: Наука. Гл. ред. физ. - мат. лит-ры, 1985]:
где 
После преобразования получим:
Формулы (1), (2) и (4) верны для малых углов, т.е. когда выполняется условие tg(ω)≈ω. Анализ приведенной зависимости показывает, что уменьшение размера теневой зоны возможно путем уменьшения расстояния t между передающим и приемным каналом и(или) увеличением расходимости лазерного излучения 2ω1 и поля зрения приемного канала 2ω2. Однако уменьшению расстояния t мешают, как правило, конструктивные особенности объективов, увеличение расходимости 2ω1 отрицательно сказывается на локальности измерений, а увеличение поля зрения 2ω2 отрицательно сказывается на отношении сигнал/шум, поскольку приводит к увеличению оптических шумов, собираемых фотоприемником в широком поле, и, в результате, к уменьшению предельной дальности измерений.
Известен лазерный измеритель расстояний [Патент РФ на изобретение №2471203, опубликовано 27.12.2012, МПК: G01S 17/02, G01C 3/08], выбранный в качестве прототипа, содержащий передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему (коллимирующий выходной объектив), параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный (входной) объектив, световод, входное отверстие которого расположено рядом с выходным отверстием оптической системы передающего канала, а его выходное отверстие направлено на чувствительную площадку фотоприемного устройства приемного канала. Таким образом в данном устройстве осуществлено локальное увеличение поля зрения приемного канала, что позволяет сократить размер теневой зоны, и в то же время избежать существенного увеличения световой составляющей шумов, поскольку входная апертура световода невелика.
Техническая проблема, решаемая созданием данного изобретения, заключается в том, что уменьшение размера теневой зоны реализуется исключительно при условии локального увеличения поля зрения приемного канала и только за счет усложнения конструкции путем включения в нее дополнительного элемента (световода) с необходимостью его юстировки.
Технический результат заявляемого изобретения направлен на уменьшение размера теневой зоны без увеличения поля зрения приемного канала и без использования дополнительных элементов.
Технический результат достигается тем, что дальномерное устройство содержит передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и оптически связанный с ним коллимирующий выходной объектив, а также приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и оптически связанный с ним входной объектив. При этом оно отличается от прототипа тем, что фотоприемное устройство смещено в фокальной плоскости входного объектива таким образом, чтобы оптическая ось приемного канала была повернута в сторону передающего канала на такой угол, чтобы на предельной дальности измерений поле зрения приемного канала перекрывало лазерное пятно, касаясь своим внешним краем внутреннего края лазерного пятна, при этом угол поворота оптической оси приемного канала находится как:

где γ - угол поворота оптической оси приемного канала;
D2 - диаметр зрачка входного объектива;
t - минимальное расстояние между коллимирующим выходным объективом и входным объективом;
L - максимальная (предельная) дистанция измерения;
ω1 и ω2 - углы, определяемые из расходимостей 2ω1 и 2ω2 лазерного излучения и поля зрения приемного канала соответственно.
Изобретение поясняется следующими чертежами.
На фиг. 1 изображено дальномерное устройство согласно прототипу.
На фиг. 2-3 изображено дальномерное устройство согласно заявляемому изобретению, где:
1 - лазерный излучатель;
2 - коллимирующий выходной объектив;
3 - фотоприемное устройство;
4 - входной объектив.
Дальномерное устройство содержит передающий канал, включающий лазерный излучатель 1 и оптически связанный с ним коллимирующий выходной объектив 2, а также приемный канал, включающий фотоприемное устройство 3 и оптически связанный с ним входной объектив 4. В передающем канале формируется лазерный пучок зондирующего излучения с расходимостью 2ω1, а в приемном - поле зрение приемного канала с расходимостью 2ω2. При этом входной объектив 4 находится на расстоянии t от коллимирующего выходного объектива 2, а оптическая ось приемного канала повернута в сторону передающего канала на угол γ. Поворот оптической оси приемного канала осуществляется смещением фотоприемного устройства 3 в фокальной плоскости входного объектива 4. На фиг. 2 также показаны положения поля зрения приемного канала относительно лазерного пятна на различных дистанциях от дальномерного устройства.
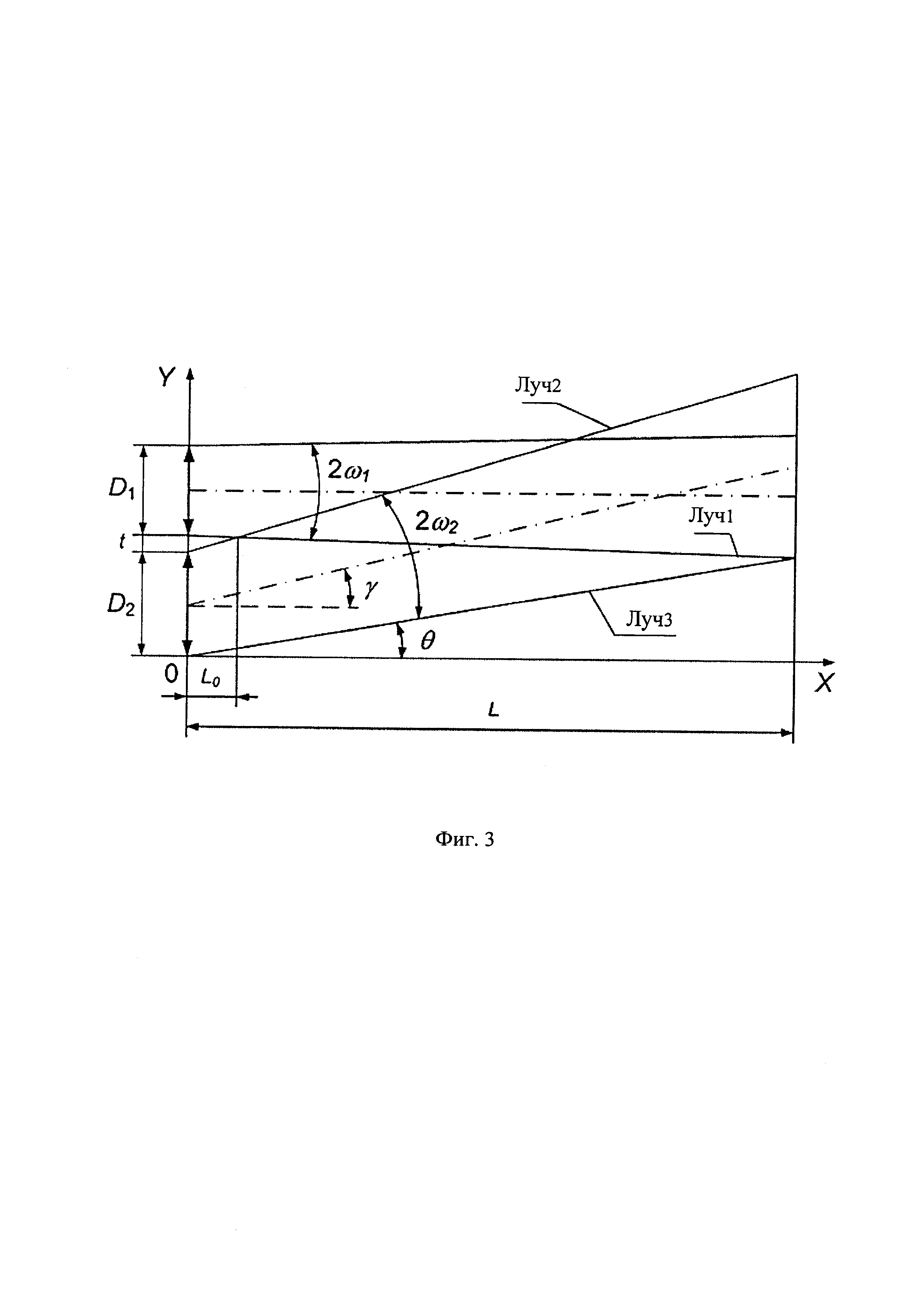
Оценим величину угла поворота оптической оси приемного канала, для этого обратимся к фиг. 3, на которой: D1 - диаметр коллимирующего выходного объектива дальномерного устройства, D2 - диаметр входного объектива и t - расстояние между ними. Расходимости лазерного излучения и поля зрения приемного канала 2ω1 и 2ω2 соответственно, причем оптическая ось приемного канала повернута на угол γ к оптической оси лазерного излучателя. При этом на предельной дистанции измерения L внутренний край пятна лазерного излучения касается внешнего края поля зрения приемного канала (лучи 1 и 3 сходятся в одну точку на дистанции L). Выберем за начало координат нижний край приемного объектива и найдем в выбранных координатах уравнение внешнего луча поля зрения приемного канала (луч 3). Для этого воспользуемся следующим соотношением [Цыпкин А.Г., Цыпкин Г.Г. Математические формулы. Алгебра. Геометрия. Математический анализ: Справочник. - М.: Наука. Гл. ред. физ. - мат. лит-ры, 1985]:

где х1, у1 и х2, у2 - координаты двух точек, через которые проходит луч 3. Поскольку луч 3 проходит через начало координат, то х1=0 и у1=0. Координата х2=L, а для того, чтобы найти координату у2 следует записать уравнение луча 1 в новой системе координат:

и подставить в качестве аргумента L, тогда у2=-ω1L+D2+t.
Подставив полученные координаты в (6), получим уравнение луча 3:

откуда находим угол поворота оптической оси приемного канала:

Из выражения (9) можем записать необходимое нам для расчета указанное выше выражение (5).
Чтобы найти размер теневой зоны L0, следует снова воспользоваться соотношением (3) для лучей 1 и 2 (Фиг. 1). Уравнение луча 2 в новых координатах запишется как:

Подставив (7) и (10) в (3) найдем размер теневой зоны L0 как:

Формулы (7÷11) верны для малых углов, т.е. когда выполняется условие tg(ω)≈ω.
Дальномерное устройство работает следующим образом.
Лазерный излучатель 1 совместно с коллимирующим выходным объективом 2 формируют на предельной дистанции измерения L лазерное пятно, а фотоприемник 3 совместно с входным объективом 4 формируют поле зрения. При этом оптические оси передающего и приемного канала пересекаются, поскольку ось приемного канала повернута в сторону передающего канала на угол γ. В результате на предельной дистанции измерения L поле зрения приемного канала накладывается на лазерное пятно таким образом, что внешний край поля зрения касается внутреннего края лазерного пятна (сечение А на рисунке). По мере сокращения дистанции поле зрения приемного канала смещается к внутреннему краю лазерного пятна пока внешний край лазерного пятна не коснется внутреннего края поля зрения приемного канала (сечение Б на рисунке). По мере дальнейшего сокращения дистанции поле зрения продолжает смещаться и перекрывает лазерное пятно лишь частично (сечение В на рисунке), пока внутренний край поля зрения не коснется внутреннего края лазерного пятна на дистанции L0, которая и является началом теневой зоны (сечение Г на рисунке) и после которой поле зрения приемного канала и лазерного пятна не пересекаются. При этом схема измерения дистанции с пересекающимися оптическими осями приемного и передающего каналов обеспечивает меньшую длину теневой зоны L0, чем схема с параллельными оптическими осями, что подтверждается расчетом.
Рассмотрим фазовый дальномер со следующими характеристиками: предельная дальность измерений L=50 м, диаметр зрачка входного объектива D2=35 мм, расходимость лазерного луча 2ω1=1,5 мрад, поле зрения приемного канала 2ω2=6 мрад, расстояние между входным и выходным объективами t=1 мм. При измерении с использованием дальномерного устройства с пересекающимися оптическими осями приемного и передающего каналов длина теневой зоны оценивается по формуле (11). При этом расчет дает значение L0=149 мм. Теперь рассмотрим схему измерения дальномерным устройством с параллельными оптическими осями приемного и передающего каналов и оценим длину теневой зоны по формуле (4). Расчет в этом случае дает значение L0=267 мм, что более чем в полтора раза больше, чем при измерении по схеме с пересекающимися оптическими осями.
Таким образом, дальномерное устройство с пересекающимися оптическими осями позволяет уменьшить размер теневой зоны без увеличения поля зрения входного канала и без применения дополнительных элементов.
Способ изготовления малогабаритных зарядов смесевого ракетного твердого топлива и технологическая линия для его осуществления
Состав для получения макетных зарядов
Заряд с воспламенителем для стартового двигателя малогабаритной ракеты
Бронечехол для вкладного заряда из смесевого твердого топлива к ракетному двигателю
Заряд твердого ракетного топлива для разгонно-маршевого ракетного двигателя управляемой ракеты
Способ определения проницаемости преграды для зондирующего излучения сверхширокополосного радара
Устройство формования зарядов торцевого горения из смесевого твердого топлива
Технологическая линия получения льняного волокна
Осколочно-фугасный снаряд
Способ определения адгезионной прочности скрепления бронепокрытия с зарядом твердого ракетного топлива
Способ телеориентации движущихся объектов
Способ телеориентации движущихся объектов
Устройство ввода лазерного излучения в торец оптического элемента
Способ телеориентации движущихся объектов

