Результат интеллектуальной деятельности: СИСТЕМЫ ОБЕСПЕЧЕНИЯ ВЫХОДА В КОСМИЧЕСКОЕ ПРОСТРАНСТВО (ВАРИАНТЫ)
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к космическим ракетам-носителям а более конкретно к системам и способам для посадки космических ракет-носителей на море, и/или для восстановления таких ракет-носителей на маршруте от посадочной площадки.
Уровень техники
Ракеты-носители с ракетным двигателем использовались в течение многих лет для доставки в космос человека, а также полезных грузов без людей. Ракеты доставили первых людей на Луну и запустили на орбиту Земли множество спутников, непилотируемых космических зондов, а также доставляют запасы и персонал на Орбитальную международную космическую станцию.
Несмотря на быстрое развитие пилотируемых и непилотируемых космических полетов, доставка астронавтов, спутников и других полезных нагрузок в космическое пространство продолжает быть дорогостоящей. Одна из причин этого состоит в том, что самые обычные ракеты-носители используются только один раз, и, следовательно, они называются "одноразовыми ракетами-носителями" или "ELV". Преимущества ракет-носителей многоразового использования (RLV) заключаются в возможности выхода в космическое пространство с малыми затратами.
Хотя космический «шаттл» НАСА по большей степени является повторно используемым, восстановление в исходное состояние повторно используемых компонентов является дорогостоящим и трудоемким процессом, который требует наличия обширной наземной инфраструктуры. Кроме того, дополнительные системы «шаттлов», требуемых для повторного ввода и посадки, снижают возможности по полезной нагрузке «шаттла». По мере увеличения коммерческого давления, сохраняется потребность в доступе к космическому пространству с низкими затратами, как для пилотируемых, так и для не пилотируемых полезных нагрузок.
Раскрытие изобретения
Задачей изобретения является создание системы обеспечения выхода в космическое пространство, которая имеет более высокую эффективность, в отношении различных видов затрат, таких как энергетические, материальные затраты и др., по сравнению с известными системами многоразоваго использования.
Указанная задача решается двумя вариантами системы для обеспечения выхода в космическое пространство. В соответствии с первым объектом изобретения, система для обеспечения выхода в космическое пространство содержит космическую ракету-носитель, которая включает в себя один или больше ракетных двигателей, причем космическая ракета-носитель выполнена с возможностью выполнения программы, которая включает в себя операции: запуска по меньшей мере одного из указанных одного или больше ракетных двигателей для запуска указанной космической ракеты-носителя в космическое пространство в ориентации носом вперед; ориентирования космической ракеты-носителя в направлении хвостом вперед для повторного входа в атмосферу земли; и приземления космической ракеты-носителя на конструкцию для посадки на водной поверхности в ориентации по существу хвостом вперед, используя тягу по меньшей мере от одного из указанных одного или больше ракетных двигателей.
В соответствии со вторым объектом изобретения, система для обеспечения выхода в космическое пространство содержит: космическую ракету-носитель, причем космическая ракета-носитель включает в себя один или больше запускаемых ракетных двигателей, выполненных с возможностью запускать космическую ракету-носитель за пределы атмосферы земли в направлении носом вперед; один или больше движителей, выполненных с возможностью ориентирования космической ракеты-носителя в направлении хвостом вперед для повторного входа в атмосферу земли; и поверхность управления, выполненную с возможностью разворачиваться после запуска космической ракеты-носителя и до касания космической ракетой-носителем конструкции для посадки на воде в ориентации по существу хвостом вперед, используя тягу по меньшей мере от одного из указанных одного или больше ракетных двигателей.
Краткое описание чертежей
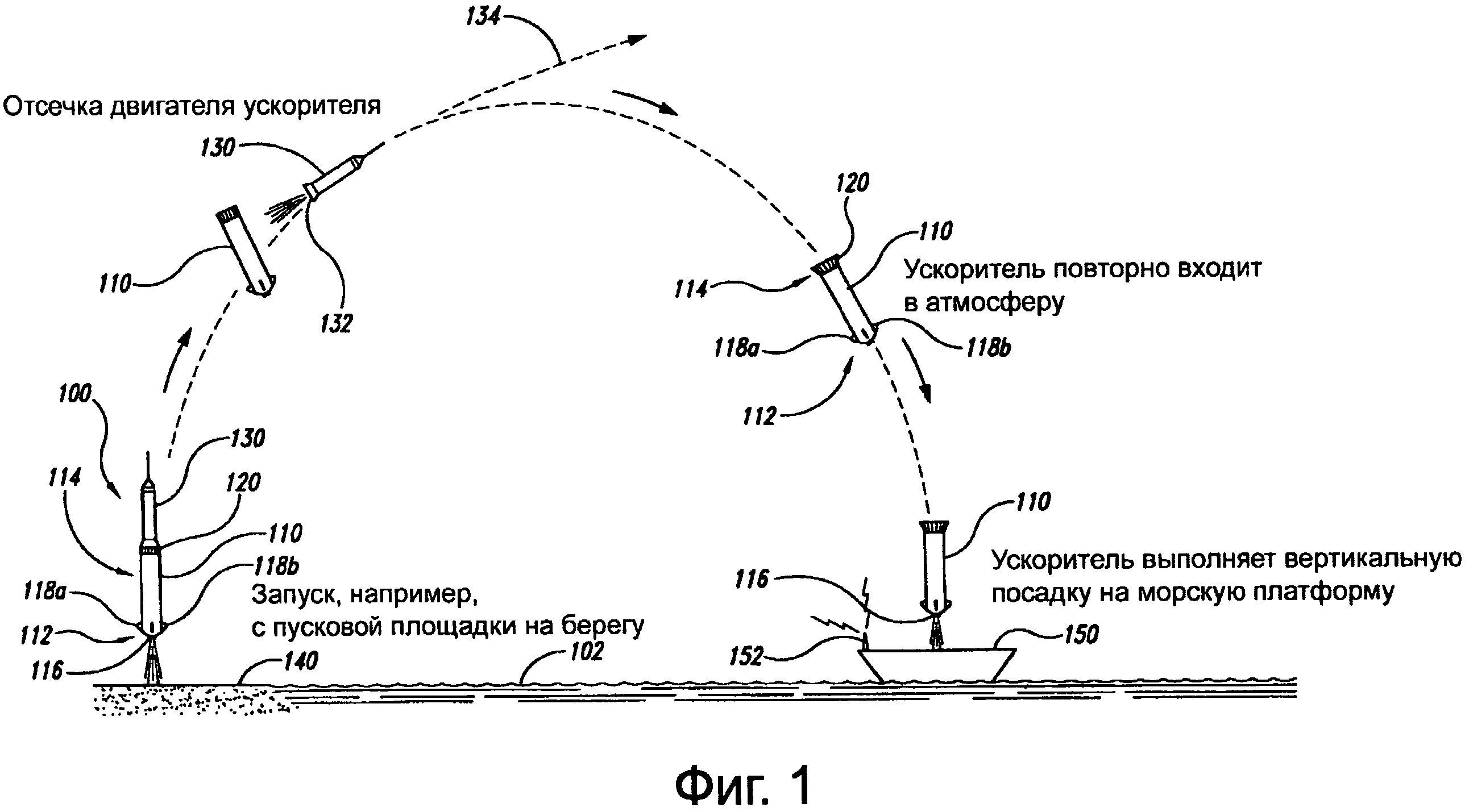
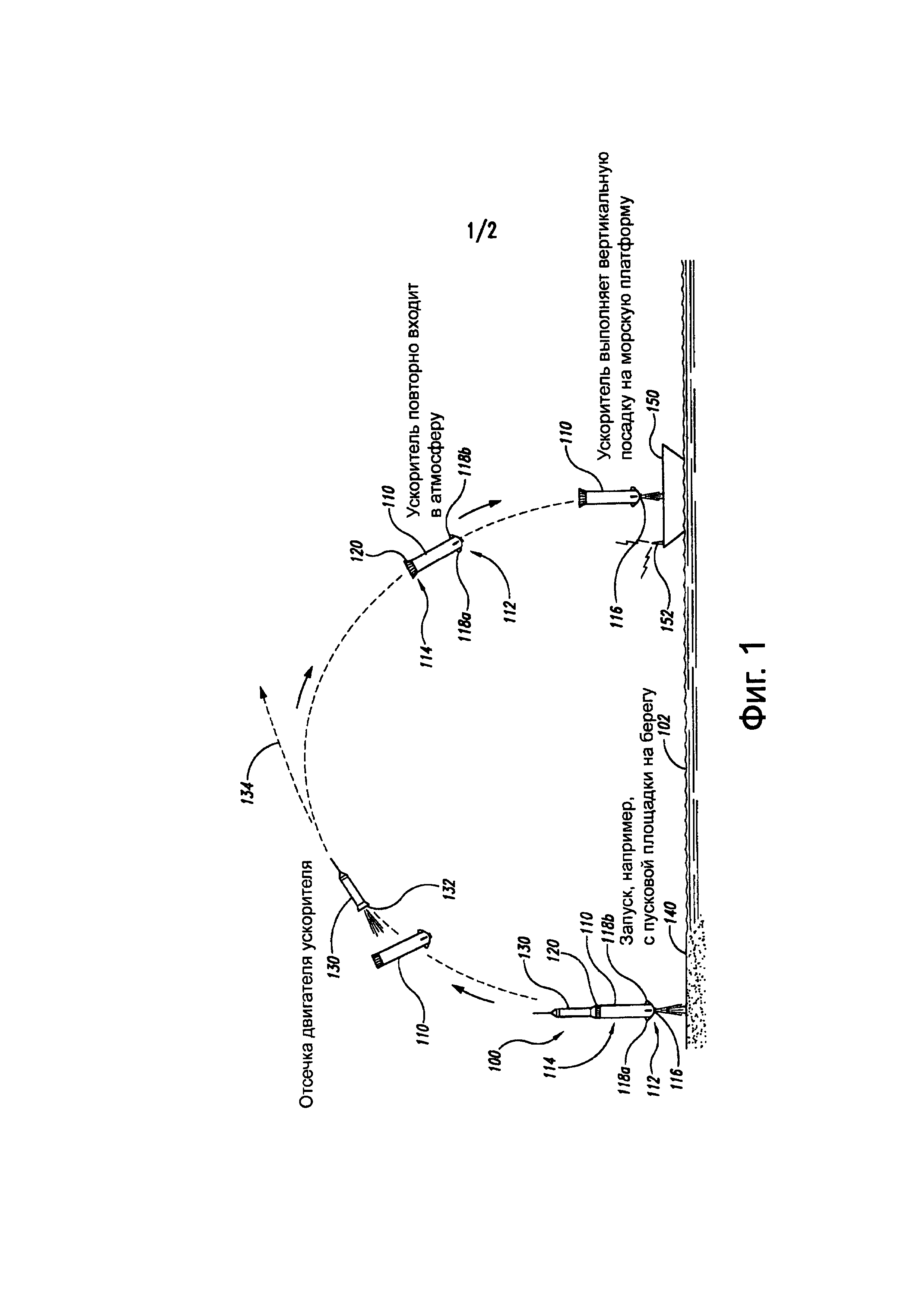
На фиг. 1 показана схема, иллюстрирующая общий вид полета космической ракеты-носителя, которая выполняет посадку на морской платформе в соответствии с вариантом осуществления изобретения.
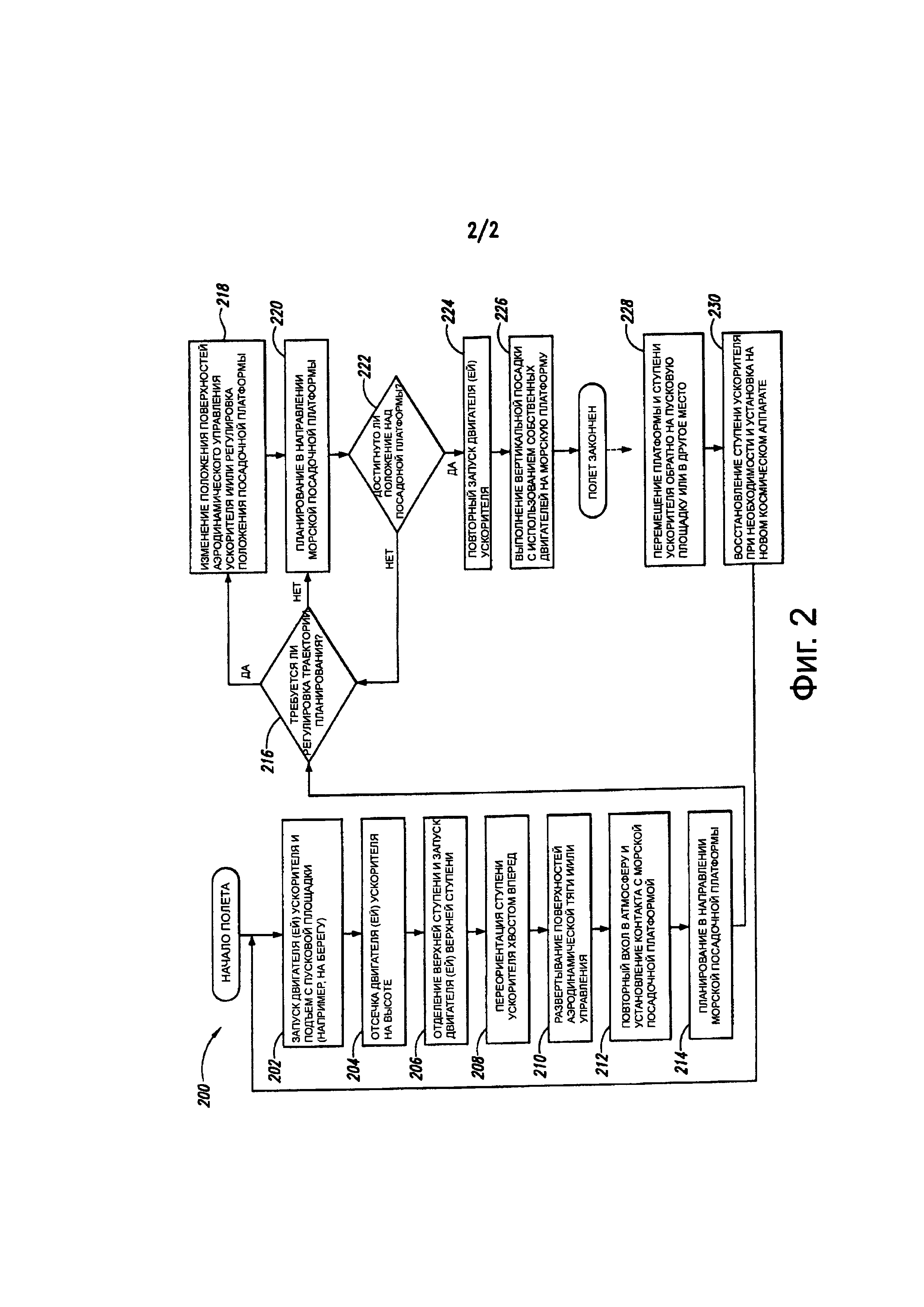
На фиг. 2 показана блок-схема, иллюстрирующая программу запуска ракеты-носителя с наземной или другой стартовой площадки и посадки космической ракеты-носителя на морскую платформу в соответствии с вариантом осуществления изобретения.
Осуществление изобретения
Определенные аспекты настоящего изобретения направлены в общем на выполнение вертикальной посадки с работающим двигателем ракеты-носителя повторного использования на морскую платформу и соответствующие системы и способы. Другие аспекты раскрытия относятся к восстановлению ракет-носителей повторного использования на маршруте от места посадки на море или другого места посадки. Определенные детали представлены в следующем описании и показаны на фиг. 1 и 2 для обеспечения полного понимания различных вариантов осуществления раскрытия. Для специалистов в данной области техники будет понятно, однако, что другие варианты осуществления, имеющие другие конфигурации, компоновки и/или компоненты, могут быть выполнены на практике без нескольких деталей, описанных ниже. В частности, другие варианты осуществления изобретения могут включать в себя дополнительные элементы, или в них может отсутствовать один или больше из элементов или свойств, описанных ниже со ссылкой на фиг. 1 и 2. Кроме того, несколько деталей, описывающих структуры и процессы, которые известны и часто ассоциированы с космическими ракетами-носителями, а также с запуском и посадкой космических ракет-носителей, не представлены в следующем описании для исключения ненужного осложнения различных вариантов осуществления изобретения.
На фигурах идентичными номерами ссылочных позиций обозначены идентичные или по меньшей мере общие аналогичные элементы. Для того, чтобы способствовать описанию какого-либо конкретного элемента, старшая значащая цифра или цифры в любом номере ссылочной позиции относятся к чертежу, на котором этот элемент впервые представлен. Например, элемент 110 впервые представлен и описан со ссылкой на фиг. 1.
Космические ракеты-носители обычно запускают с пусковых площадок, расположенных на берегу, по коридорам полета, по которым они поднимаются над океаном, над которым проходит большая часть их траектории. Эта траектория исключает потенциальный риск для общественности, связанный с перелетом ракеты, и приводит к падению ступеней ускорителя в воду. Приземление на воду, однако, делает повторное использование ступеней ускорителя дорогостоящим и трудным по ряду причин. Например, морская вода может быть очень коррозийной для компонентов ракеты. Кроме того, множество компонентов ракеты становятся очень горячими во время использования, и гашение этих горячих компонентов холодной морской водой может привести к образованию трещин и других форм повреждения. Восстановление и повторное использование твердотопливных ракетных ступеней после посадки на воду с парашютом выполнимо на практике, потому что твердотопливный ракетный двигатель представляет собой не более, чем пустой корпус после сгорания топлива. Ступени ракеты с жидким топливом, однако, являются существенно более сложными. В результате, немногие, если вообще были, ракетные ступени с жидким топливом подвергались повторному использованию после посадки на воду.
Существуют концепции посадки ступеней ускорителя на землю. Эти концепции включают в себя горизонтальную посадку ступеней ускорителя, как самолета, или вертикальную, используя собственное торможение двигателями ступени или на парашюте, или с помощью другого средства. Все эти подходы, однако, ограничивают функциональную гибкость, поскольку они требуют наличия места посадки на земле для каждого азимута запуска и потенциально сужают область посадки.
Другие концепции были предложены, в которых ступень ускорителя повторно запускает свои ракетные двигатели после отделения от верхней ступени (ступеней), и затем летит обратно на стартовую площадку. Прибыв к стартовой площадке, ступень ускорителя либо выполняет горизонтальную посадку на взлетно-посадочную полосу, или вертикальную посадку, используя силовые или другие средства, такие, как парашют. Оба из этих подходов, однако, уменьшают возможности по выведению полезной нагрузки на орбиту, поскольку они требуют, чтобы ракета несла существенную нагрузку ракетного топлива для выполнения маневра с полетом обратно.
На фиг. 1 показана схема, иллюстрирующая профиль полета ракеты-носители повторного использования, которая выполняет вертикальную посадку с помощью собственных двигателей на морскую платформу в соответствии с вариантом осуществления раскрытия. В представленном варианте осуществления многоступенчатая орбитальная ракета-носитель 100 включает в себя первую ступень или ступень 110 ускорителя и вторую или верхнюю ступень 130. Ступень 110 ускорителя может включать в себя структуру промежуточного отсека между ступенями, содержащую разворачиваемые аэродинамические поверхности 120, расположенные в направлении переднего конца 114, и один или больше ракетных двигателей 116, расположенных в направлении хвостового конца 112. Ракетные двигатели 116 могут включать в себя, например, ракетные двигатели с жидким топливом, такие как двигатели с жидким кислородом/водородом, жидким кислородом/керосином или двигатель RP 1 и т.д. В других вариантах осуществления ракетные двигатели 116 могут включать в себя твердые ракетные топлива. Как более подробно описано ниже, хвостовая часть 112 ступени 110 ускорителя также может включать в себя множество подвижных поверхностей 118 управления (идентифицированных индивидуально, как поверхности 118а, 118b и т.д. управления), предназначенных для управления как на траектории с увеличением, так и на траектории с уменьшением высоты ступени 110 ускорителя.
Хотя верхняя ступень 130 установлена поверх ступени 110 ускорителя в представленном варианте осуществления, в других вариантах осуществления, ракета-носитель 100 и ее варианты могут иметь другие конфигурации, без выхода за пределы сущности или объема настоящего раскрытия. Например, в одном варианте осуществления верхняя ступень 130 и ступень 110 ускорителя могут быть установлены рядом друг с другом и прикреплены друг к другу во время подъема с помощью соответствующей системы разделения. В другом варианте осуществления две или больше ступени 110 ускорителя или их варианты могут быть расположены вокруг верхней ступени 130 в конфигурации типа "связки". В соответствии с этим, настоящее изобретение не ограничено конкретной конфигурацией ракеты-носителя, представленной на фиг. 1.
В представленном варианте осуществления ракету-носитель 100 запускают из находящейся на берегу или другой стартовой площадки 140, и затем она поворачивается и летит над океаном 102. В одном аспекте данного варианта осуществления морская платформа 150 может включать в себя станцию 152 широковещательной передачи, предназначенную для передачи ее положения в ракету-носитель 100 в режиме реального времени. Эта информация позволяет ракете-носителю 100 и/или ступени 110 ускорителя постоянно проверять и/или регулировать свою траекторию полета, так, чтобы она была нацелена на платформу 150. Если платформа 150 представляет собой свободно дрейфующее судно, платформа 150 также может включать в себя блок прогнозирования положения платформы (например, соответствующее устройство обработки, запоминающее устройство и соответствующие исполняемые компьютером инструкции), который автоматически прогнозирует будущее положение платформы 150 на основе различных существующих условий, таких как сила и направление морского течения, сила и направление ветра, текущая скорость и направления дрейфа и т.д. Например, блок прогнозирования положения платформы может быть выполнен с возможностью прогнозирования положения платформы в ожидаемое время приземления ракеты-носителя. Кроме того, станция 152 широковещательной передачи может передавать эту информацию на ракету-носитель 100 и/или на ступень 110 ускорителя в режиме реального времени, так, что ракета-носитель 100 и/или ступень ПО ускорителя могут использовать эту информацию для регулирования своей траектории полета и лучшего нацеливания на местоположение посадки. После отсечки двигателя ускорителя (ВЕСО) на большой высоте ступень 110 ускорителя отделяется от верхней ступени 130 и продолжает полет по баллистической траектории. Двигатель или двигатели 132 верхней ступени (например, двигатели на жидком топливе) могут затем быть запущены и могут обеспечивать полет верхней ступени 130 по более высокой траектории 134 для вывода на орбиту или в другие места назначения. По мере того, как ступень 110 ускорителя повторно входит в атмосферу земли, она изменяет ориентацию таким образом, что хвостовой конец 112 устанавливается в направлении движения, и планирует в направлении морской посадочной платформы 150. В другом варианте осуществления ступень 110 ускорителя может повторно войти в атмосферу носом вперед, и затем изменить ориентацию на ориентацию хвостом вперед непосредственно перед посадкой. В еще одном другом варианте осуществления посадочные ракетные двигателя и/или соответствующие структуры посадочных шасси могут быть установлены на переднем конце 114 ступени 110 ускорителя таким образом, чтобы ступень 110 ускорителя могла повторно войти в атмосферу носом вперед и затем выполнить посадку в ориентации носом вниз.
В зависимости от конкретной траектории запуска морская платформа 150 может быть расположена на расстоянии сотен или больше миль от расположенной на берегу пусковой площадки 140. По мере того, как ступень 110 ускорителя опускается в направлении морской платформы 150, ступень 110 ускорителя может регулировать свой курс планирования, нацеливаясь на платформу 150, на основе данных положения платформы, принятых из станции 152 широковещательной передачи. Кроме того, или в качестве альтернативы, морская платформа 150 может включать в себя погруженную в воду или частично погруженную в воду систему привода (имеющую, например, пропеллеры или другие устройства привода), для поддержания платформы 150 в заданном положении или перемещения платформы 150 в соответствии с необходимостью, для регулирования дрейфа и/или изменения траектории ускорителя. Один или больше катеров с тросами также можно использовать для удержания платформы 150 в требуемом положении или перемещения платформы 150, в соответствии с необходимостью, для регулирования дрейфа и/или изменений траектории ускорителя.
По мере того, как ступень 110 ускорителя снижается в направлении морской платформы 150, ступень 110 ускорителя может управлять курсом своего планирования, используя поверхности 118 аэродинамического управления, расположенные на хвостовом конце 112, и/или разворачиваемые поверхности 120 управления, расположенные в направлении переднего конца 114. В одном аспекте данного варианта осуществления разворачиваемые поверхности 114 управления могут включать в себя аэродинамические поверхности, которые раскрываются или разворачиваются в направлении наружу, в форме, например, волана, для создания аэродинамической тяги позади центра тяжести (CG) ступени 110 ускорителя, что помогает стабилизировать ступень 110 ускорителя в ориентации хвостом вперед. В другом аспекте данного варианта осуществления выполненные с возможностью движения поверхности 118 аэродинамического управления, расположенные в направлении хвостового конца 112 ускорителя 110, могут включать в себя двунаправленные поверхности управления, которые могут управлять высотой и/или траекторией ступени 110 ускорителя, как во время подъема, когда ракета-носитель 100 движется в направлении вперед, так и при снижении, когда ступень 110 ускорителя движется в направлении хвостом вперед к плывущей по морю платформе 150. В соответствии с этим, в одном аспекте данного варианта осуществления поверхности 118 аэродинамического управления представляют собой двунаправленные, сверхзвуковые поверхности управления. В других дополнительных вариантах осуществления соответствующая система парашюта может быть развернута из, например, переднего конца 114 ступени 110 ускорителя, для уменьшения и/или по-другому управления скоростью снижения во время всего или части снижения.
После того, как ступень 110 ускорителя спустится в соответствующее положение над платформой 150 (например, в некоторых вариантах осуществления от приблизительно 100000 футов до приблизительно 1000 футов, или в других вариантах осуществления от приблизительно 10000 футов до приблизительно 3000 футов), она повторно запускает двигателя 116 ускорителя, для замедления скорости своего снижения. Ступень 110 ускорителя затем выполняет вертикальную посадку с работающим двигателем на платформу 150 с низкой скоростью. Например, ступень 110 ускорителя может замедлиться от скорости снижения приблизительно 60 футов в секунду до приблизительно 1 фута в секунду или меньше, и может быть посажена на посадочную платформу 150, используя карданную подвеску двигателей 116 ускорителя и/или двигатели системы управления высотой, для управления высотой и/или положением ступени 110 ускорителя во время посадки. В одном варианте осуществления ступень 110 ускорителя может быть посажена на соответствующие, поглощающие удары, шасси. В других вариантах осуществления другое средство посадки может использоваться для соответствующей посадки ступени ПО ускорителя на морскую платформу 150, в соответствии с настоящим раскрытием.
В другом варианте осуществления один или больше реактивных двигателей (не показаны) могут быть соответствующим образом установлены на хвостовом конце 112 или на другом участке ступени 110 ускорителя для выполнения всех или части маневров при вертикальной посадке. Реактивные двигатели могут быть запущены во время снижения ступени ускорителя и могут использоваться в комбинации с или вместо повторно запускаемых двигателей 116 ускорителя. Реактивные двигатели могут быть более эффективными по потреблению топлива, чем двигатели 116 ускорителя и, как результат, могут обеспечить большее времени полета и лучшее управление для ступени 110 ускорителя во время посадки на платформу 150. В одном варианте осуществления реактивные двигатели могут использоваться в комбинации с соответствующей системой парашюта, которая разворачивается и замедляет ступень 110 ускорителя перед запуском реактивных двигателей.
В одном варианте осуществления морская платформа 150 может представлять собой свободно плавающую, предназначенную для плавания по океану баржу с соответствующей палубой, предназначенной для посадки и транспортирования ступени 110 ускорителя. В других вариантах осуществления платформа 150 может составлять часть более сложного судна, такого как полупогруженная платформа, имеющая подводные движители, для сведения к минимуму или, по меньшей мере, уменьшения движения палубы и удержания ее в фиксированном или относительно фиксированном положении. В варианте осуществления на основе баржи морская платформа 150 может быть отбуксирована обратно на пусковую площадку 140, расположенную на берегу, или другой порт после посадки для ремонта и/или восстановления для повторного использования. В одном варианте осуществления морская платформа 150 может быть отбуксирована с помощью буксира или другого соответствующего судна. В других вариантах осуществления морская платформа 150 может включать в себя свою собственную систему привода в движение для транспортирования ступени 110 ускорителя обратно на пусковую площадку 140 или в другой порт.
Существует множество преимуществ, связанных с вариантами осуществления настоящего раскрытия, описанными выше со ссылкой на фиг. 1. Например, восстановление ступени 110 ускорителя, после посадки на морскую платформу уменьшает затраты, связанные с выводом на орбиту многоступенчатых ракет-носителей. Кроме того, путем выполнения вертикальной посадки с использованием собственных двигателей, ступень ускорителя восстанавливается таким образом, что сводится к минимуму или, по меньшей мере, уменьшается количество восстановительных работ необходимых для повторного использования. Кроме того, варианты осуществления раскрытия, описанные выше, могут улучшить функциональную гибкость ракет-носителей, поскольку движущаяся в океане платформа 150 может перемещаться в другую область океана при изменении азимута запуска миссии и/или при изменении места посадки предполагаемого полета. Кроме того, движущаяся по океану платформа 150 даже может быть перемещена в другие части мира для поддержки запусков с других площадок (например, с других пусковых площадок, расположенных на берегу). Кроме того, для запуска с пусковых площадок, расположенных на берегу, ракета-носитель 100 также может быть запущена с моря с движущейся по океану платформы или судна и затем может приземлиться в пределах дальности посадки на движущуюся по океану платформу 150. Такие варианты осуществления могут быть предпочтительными для экваториальных запусков с морских платформ для повышения полезной нагрузки. В качестве альтернативы, в других вариантах осуществления ракета-носитель 100 может быть запущена с движущейся по океану платформы, и затем ускоритель 110 может быть восстановлен, в результате выполнения вертикальной посадки с использованием собственных двигателей на суше.
Варианты осуществления изобретения, описанные выше, также могут увеличить возможности по доставке полезной нагрузки ракеты-носителя 100, обеспечивая возможность более эффективного полета ступени 110 ускорителя, или, по меньшей мере, с использованием очень эффективной траектории, когда она повторно входит в атмосферу и движется в направлении платформы 150. Возможности по полезной нагрузке увеличиваются, поскольку не требуется содержать ракетное топливо на ступени 110 ускорителя для обратного полета в место посадки, находящееся на суше. Кроме того, морская платформа 150 может быть установлена в любом местоположении, где будет определено место посадки ступени 110 ускорителя после отделения от верхней ступени 130. Варианты осуществления, раскрытые здесь, также могут уменьшить или устранить общественную озабоченность в отношении безопасности, связанную с реверсированием траектории полета ступени 110 ускорителя для посадки на суше.
Варианты осуществления представленного выше изобретения также позволяют решить проблему транспортирования ступени 110 ускорителя обратно либо к пусковой площадке 140, расположенной на берегу, или к другому предприятию, расположенному на суше, занимающемуся восстановлением. Более конкретно, ступени ускорителя ракет-носителей обычно являются очень большими по размерам и, в результате, их транспортировка в полностью собранном виде может представлять собой существенные проблемы в отношении логистики и затрат. Если ступень ускорителя будет посажена на сушу, проблема транспортирования ступени ускорителя обратно, либо на пусковую площадку, или к месту ее восстановления, должна быть решена, и транспортирование по суше предметов с размерами ступени ускорителя представляют собой проблему с точки зрения логистики и финансов. В отличие от этого, транспортирование по океану представляет собой эффективное по затратам средство транспортирования больших грузов, таких как ступени ускорителя, на большие расстояния. Морская платформа 150, в соответствии с настоящим раскрытием, может быть отбуксирована обратно в гавань рядом с пусковой площадкой и разгружена для восстановления и повторного использования при относительно малых затратах.
Хотя на фиг. 1 представлен вариант осуществления изобретения в контексте восстановления ступени ускорителя, настоящее изобретение также можно применять для восстановления возвращаемого с орбиты средства с точностью, обеспечиваемой вертикальной посадкой с использованием собственных двигателей. Одно из преимуществ такого подхода состоит в том, что он мог бы обеспечить возможность установки морской платформы 150 в любой области океана или в другой массе воды (например, в проливе, на озере и т.д.), пригодной для посадки возвращающегося средства доставки. Кроме того, множество движущихся по морю платформ могут быть размещены во всем мире в заданных местах расположения для обеспечения зон посадки для непредвиденной ситуации, если необходимо для прерванной миссии.
На фиг. 2 иллюстрируется программа (процедура) 200 полета в виде блок-схемы последовательности операций способа запуска и посадки космической ракеты-носителя, например, ракеты-носителя, в соответствии с вариантом осуществления настоящего изобретения. В одном аспекте данного варианта осуществления программа 200 может быть воплощена для ракеты-носителя 100, описанной выше со ссылкой на фиг. 1. В других вариантах осуществления программа 200 или ее части могут использоваться другими типами ракет-носителей, включая в себя ракеты-носители, неорбитальные ракеты-носители, средства выведения в открытый космос и межпланетные средства, и т.д.
В блоке 202 программа начинается с запуска двигателя ускорителя и подъема с пусковой площадки (например, пусковой площадки на суше, такой как пусковая площадка, расположенная на берегу). Как описано выше, в других вариантах осуществления миссия (программа полета) может начаться с подъема с пусковой площадки, расположенной на море, такой как плавающая платформа, баржа, корабль или другое судно. В блоке 204 возникает отсечка двигателя ускорителя на заданной высоте. В блоке 206 верхняя ступень отделяется от ступени ускорителя, и двигатель или двигатели верхней ступени запускаются.
В блоке 208 ступень ускорителя изменяет ориентацию, следуя по своей баллистической траектории после отделения от верхней ступени. Более конкретно, ступень ускорителя изменяет ориентацию так, что она движется хвостом вперед. В одном варианте осуществления изменение ориентации ступени ускорителя может быть выполнено с использованием разворачиваемых аэродинамических поверхностей (например, расширяющихся поверхностей), которые продолжаются наружу от переднего конца ступени ускорителя для получения силы тяги позади CG ступени ускорителя. В других вариантах осуществления движители (например, ракетные движители, такие как движители на гидразине) могут использоваться в дополнение к или вместо аэродинамических поверхностей управления для изменения ориентации ступени ускорителя. Например, если изменение ориентации ступени ускорителя происходит в космическом пространстве, где аэродинамические поверхности управления являются неэффективными, тогда движители могут использоваться для изменения ориентации ступени ускорителя.
В блоке 210 поверхности аэродинамической тяги и/или управления разворачивают перед или во время повторного входа средства доставки в атмосферу земли. В блоке 212, ступень ускорителя повторно входит в атмосферу и устанавливает контакт с движущейся по морю посадочной платформой. В качестве альтернативы, ракета-носитель может установить контакт с движущейся по морю посадочной платформой перед повторным входом, или может находиться в постоянном контакте с движущейся по морю платформой во время всего полета. В блоке 214 ступень ускорителя планирует или по-другому следует баллистической траектории в направлении движущейся по морю посадочной платформы.
В блоке 216 принятия решения процедура определяет, требуется ли отрегулировать ступень ускорителя для правильной установки ступени ускорителя над движущейся по морю платформой. Если нет, процедура переходит в блок 220, и ступень ускорителя продолжает планировать в направлении движущейся по морю платформы. Если требуется отрегулировать траекторию планирования, процедура переходит в блок 218 и приводит в движение аэродинамические поверхности управления для изменения траектории планирования ступени ускорителя. В качестве альтернативы, или в дополнение к изменению траектории планирования ступени ускорителя, программа также может регулировать положение посадочной платформы, используя, например, системы привода в движение, ассоциированные с посадочными платформами или с буксированием платформы.
После регулирования траектории планирования и/или положения посадочной платформы, процедура переходит в блок 222 принятия решения, для определения, является ли положение ступени ускорителя установленной над посадочной платформой, соответствующим для подготовки к заключительному этапу посадки. Если нет, программа возвращается в блок 216 принятия решения и повторяется. После того, как средство вывода будет установлено в соответствующем положении над посадочной платформой, для подготовки к конечным процедурам посадки, программа переходит в блок 224 и выполняет повторный запуск двигателей ускорителя. В блоке 226 ракета-носитель выполняет вертикальную посадку с использованием собственных двигателей на морскую платформу, и участок полета программы заканчивается.
Однако, в одном варианте осуществления, программа 200 может продолжаться в блоке 228, для перемещения платформы и ступени ускорителя обратно к пусковой площадке или в другой порт для восстановления и повторного использования. В блоке 230, ступень ускорителя восстанавливают в соответствии с необходимостью и устанавливают на новую ракету-носитель. Из блока 230 программа возвращается в блок 202 и повторяется для новой ракеты-носителя.
В определенном варианте осуществления морская платформа может быть расположена таким образом, что это улучшает и/или оптимизирует отделение второй ступени ракеты-носителя, например, как по азимуту, так и по расстоянию от пусковой площадки. Например, по меньшей мере, в некоторых случаях, возможность перемещения движущейся по морю платформы позволяет расширить диапазон доступных местоположений, в которых пусковой ускоритель отделяется от остальной ракеты-носителя, поскольку место посадки ускорителя не очень строго ограничено. Возможность управления траекторией при снижении ускорителя позволяет дополнительно расширить диапазон доступных мест посадки.
В любом из описанных вариантов осуществления, после посадки ракеты-носителя, общий процесс может включать в себя дополнительные этапы, которые способствуют быстрому возврату ракеты-носителя в работу. Например, ракета-носитель может быть передана с относительно медленно движущейся по морю платформы на более быстрое надводное судно, для уменьшения времени его перевода обратно на пусковую площадку. В дополнение или вместо переноса, использование ракеты-носителя может быть восстановлено во время ее транспортирования от места посадки до пусковой площадки. Аспекты этих обоих свойств описаны дополнительно ниже в контексте восстановления на море ракеты-носителя. В других вариантах осуществления конкретные аспекты этих свойств (например, восстановление ракеты-носителя и маршрут от места посадки) можно применять для других компоновок восстановления, включая в себя восстановление на суше.
В конкретном варианте осуществления ракету-носитель (например, повторно используемая система ускорителя первой ступени или RBS) сразу и/или автономно переводят в безопасное состояние после посадки на морскую посадочную платформу и до того, как команда по обработки приблизится к средству. Автономные действия по обеспечению безопасности могут включать в себя вентиляцию баков для ракетного топлива и баллонов с вытесняющим газом, и убирают любые аэродинамические поверхности. Средство затем может быть перенесено на отдельное, меньшего размера судно для более быстрого возврата к пусковой площадке на берегу или к месту перегрузки. В другом варианте осуществления средство может быть закреплено на палубе посадочной платформы, и платформа может быть отбуксирована или может перемещаться с использованием своего собственного привода обратно к пусковой площадке на берегу или к месту перегрузки. В каждом случае, средство вывода может перемещаться с помощью морского крана (или другого соответствующего устройства) для закрепления средства вывода в вертикальном или в горизонтальном положении для транспортировки по океану, и может быть разгружено на грузовик в доке для возврата на предприятие по обработке средства вывода на пусковой площадке.
Во время движения, а также на предприятии по обработке средства вывода, ракета-носитель может быть обработана для следующего запуска. Действия, связанные с повторным использованием, которые обычно выполняют перед каждым запуском, могут включать в себя пункты технического обслуживания (если имеются), очистку, перезарядку баллонов с вытесняющим газом, перезарядку электрических аккумуляторных батарей, восстановление материалов системы тепловой защиты, если требуется, и/или функциональное тестирование пневматических, гидравлических подсистем и подсистем авионики. Находясь на маршруте движения или на предприятии по обработке средства вывода, средство вывода может быть состыковано с невосстанавливаемой верхней ступенью, которая может быть заранее собрана с полезной нагрузкой и обтекателем полезной нагрузки. В других случаях ракета-носитель может быть непосредственно состыкована с модулем полезной нагрузки. Через периодические интервалы также могут быть выполнены основные действия по техническому обслуживания, такие как капитальный ремонт двигателя.
Во время описанных выше действий при обработке, если вся система включает в себя одну морскую платформу, и она используется для транспортирования средства вывода обратно к пусковой площадке на берегу, платформа может быть затем повторно установлена в зоне посадки после разгрузки средства вывода, и будет готова к посадке второго средства вывода, в то время как первое средство вывода находится на пути к пусковой площадке. Если вся система включает в себя две морские платформы, то одна морская платформа может оставаться в зоне посадки между полетами, в то время, как другая возвращается к берегу. В еще одном другом варианте осуществления система может включать в себя две ракеты-носителя, одну морскую посадочную платформу и отдельное судно, которое транспортирует средство вывода от платформы до пусковой площадки, что также позволяет одной посадочной платформе оставаться в зоне посадки между полетами. Отдельное судно может включать в себя морское судно или летательный аппарат в определенных вариантах осуществления.
В любом из предыдущих вариантов осуществления может быть выполнен любой соответствующий аспект процесса восстановления во время транспортировки средства вывода, при условии, что, например, такой процесс может быть успешно выполнен в морских условиях, и соответствующим образом будет состыкован с последующими процессами.
Исходя из выше приведенного, следует понимать, что конкретные варианты осуществления изобретения были описаны здесь с целью иллюстрации, но различные модификации могут быть выполнены без отклонения от сущности и объема различных вариантов осуществления изобретения. Например, хотя различные варианты осуществления настоящего раскрытия были описаны выше в контексте посадки ракеты-носителя на море, в других вариантах осуществления системы и способы, описанные здесь, могут использоваться для посадки ракеты-носителя на других водных пространствах, включая в себя, например, озеро, залив, океан, пролив или, возможно, даже большую реку. Кроме того, в то время как различные преимущества, связанные с определенными вариантами осуществления раскрытия, были описаны выше в контексте этих вариантов осуществления, другие варианты осуществления также могут проявлять такие преимущества, и не все варианты осуществления обязательно должны проявлять такие преимущества, чтобы попадать в объем изобретения. В соответствии с этим, изобретение не ограничено ничем, за исключением приложенной формулы изобретения.
Средства выведения на орбиту с неподвижными и развертываемыми повехностями торможения и/или фасонными топливными баками и соответствующие системы и способы
Посадка на море космических ракет-носителей и соответствующие системы и способы
Ракеты-носители с кольцеобразными внешними элементами и соответствующие системы и способы
Посадка на море космических ракет-носителей и соответствующие системы и способы
Управляющая информация, связанная с сетевыми ресурсами

