Результат интеллектуальной деятельности: Способ прокладывания маршрута движения подвижных объектов по пересеченной местности
Вид РИД
Изобретение
Изобретение относится к области автоматизации информационных систем управления и контроля, функционирующих в реальном масштабе времени, для прогнозирования маршрутов движения подвижных объектов на базе разностных транспортных средств (ТС) по пересеченной местности в сложной динамично развивающейся обстановке в условиях априорной неопределенности конечного пункта назначения.
Известен способ, реализованный в устройстве выбора оптимального маршрута маневра (см. Пат. РФ №2045773, МПК G06F 17/16 от 19.10.1995 г.), в котором предложено управление движением разнотипных транспортных средств по автодорожной сети с различной проходимостью участков дорог. Способ обеспечивает автоматизированный выбор оптимального маршрута движения для транспортного средства при минимизации расхода горюче-смазочных материалов.
Недостатком способа-аналога является невозможность прокладывания маршрута по пересеченной местности.
Известен способ оценки местности, описанный в Пат. РФ №2600096, МПК G06F 19/00 (2011.01), H04W 40/20 (2009.01), опубл. 10.07.2016 г., бюл. №29. Способ-аналог включает введение начальных условий и данных по заданному географическому району, загрузку цифровой карты местности, проведение оценки местности по физико-географическим условиям, исключение зон, непригодные для размещения мобильных объектов по эксплуатационно-техническим возможностям, оптимизацию цифровой карты местности с помощью методов динамического программирования по частным и обобщенному критериям с последующей оценкой возможности размещения мобильных объектов.
Способ обеспечивает снижение времени на определение районов размещения на местности мобильных объектов различного назначения.
Однако способу присущи недостатки, ограничивающие его применение. В способе-аналоге обеспечивается анализ пригодности отдельных участков местности, но не предусматривается анализ их доступности для удаленных мобильных объектов. Кроме того, аналог не учитывает сложной, динамично развивающейся оперативной и электромагнитной обстановки.
Наиболее близким по своей сущности к заявляемому является способ прокладывания маршрута передвижения на пересеченной местности, описанный в Пат. РФ №2439496, МПК G01C 21/34 (2006.01), опубл. 10.01.2012 г., бюл. №1. Он включает загрузку электронной карты местности, определение точек старта A (X,Y)A и финиша В (X,Y)B, анализ проходимости местности с помощью введения коэффициентов, определение типа и технических характеристик транспортных средств, предназначенных для перемещения по местности, определение непроходимых для выбранных транспортных средств зон административного и физического характера, отображение на электронной карте непроходимых зон, исключение из расчетов непроходимых зон, сравнивание области проходимости с непроходимыми зонами, формирование возможных маршрутов движения по карте для выбранного транспортного средства, определение наличия матрицы высот, формирование трехмерной сетки с учетом матрицы высот, расчет приведенных весов для каждого участника маршрута, оценку участка пути с помощью вычисления частных коэффициентов ki, определение непроходимых зон, в случае ki≤1 расчет обобщенного коэффициента проходимости для участка пути, расчет длины участка пути, расчет приведенного веса дуги графа, определение затрат на границах участка местности, расчет рационального маршрута для выбранного транспортного средства при минимизации длины пути и энергетических ресурсов с использованием алгоритма Дейкстры.
Прототип обеспечивает оптимизацию маршрута движения транспортных средств на пересеченной местности. В результате достигается снижение временных затрат на прокладывание маршрута и минимизация расхода горюче-смазочных материалов.
Однако прототип обладает недостатками, ограничивающими его применение. Способ предполагает априорное знание точек старта A (X,Y)A и финиша В (X,Y)B. Однако при решении целого ряда специальных задач точка В (X,Y)В неизвестна. В результате известный способ теряет свою работоспособность. Кроме того, в способе-прототипе не используют цифровые модели местности (тайловые геопокрытия геоинформационных систем), что влечет за собой значительные временные затраты на прокладывание рационального маршрута движения ТС по пересеченной местности.
Целью заявляемого технического решения является разработка способа прокладывания маршрута движения подвижных объектов по пересеченной местности, обеспечивающего повышение вероятности правильного определения маршрута движения группы подвижных объектов в условиях априорной неопределенности конечного пункта их следования.
Поставленная цель достигается тем, что в известном способе прокладывания маршрута движения подвижных объектов на пересеченной местности, состоящем в определении границ района сбора информации на цифровой карте геоинформационной системы, делении района сбора информации на элементарные участки, оценке элементарных участков района сбора информации по тактическим свойствам местности и инженерным признакам, определении элементарных участков района сбора информации, в которых возможно передвижение объектов, исключении из анализа непроходимых элементарных участков, определении типа и характеристик транспортных средств, используемых для перемещения объектов в районе сбора информации, анализе проходимых элементарных участков района сбора информации по различным частным критериям, в районе сбора информации отображают положение линии барьерного рубежа, после обнаружения группы подвижных объектов определяют ее координаты (X,Y)'A, состав, возможную принадлежность и среднюю скорость перемещения, с учетом оперативной обстановки в районе сбора информации, оперативного предназначения, частных и обобщенному критериям оценки возможного размещения группы объектов на местности, определяют координаты  возможных позиционных районов
возможных позиционных районов  , i=1, 2, …, I, в один из которых следует группа подвижных объектов, формируют возможные маршруты движения группы подвижных объектов из точки с координатами (X,Y)'A ко всем возможным позиционным районам, определяют оптимальный маршрут движения группы подвижных объектов до каждого возможного позиционного района, вычисляют время прибытия объектов в позиционные районы по оптимальному маршруту, находят i-й позиционный район с минимальным временем прибытия группы объектов, а в качестве наиболее вероятного принимают оптимальный маршрут движения группы подвижных объектов в этот позиционный район.
, i=1, 2, …, I, в один из которых следует группа подвижных объектов, формируют возможные маршруты движения группы подвижных объектов из точки с координатами (X,Y)'A ко всем возможным позиционным районам, определяют оптимальный маршрут движения группы подвижных объектов до каждого возможного позиционного района, вычисляют время прибытия объектов в позиционные районы по оптимальному маршруту, находят i-й позиционный район с минимальным временем прибытия группы объектов, а в качестве наиболее вероятного принимают оптимальный маршрут движения группы подвижных объектов в этот позиционный район.
Благодаря новой совокупности существенных признаков: определению возможной оперативно-тактической принадлежности обнаруженной группы подвижных объектов, средней скорости перемещения и наиболее вероятной конечной точки следования, обеспечивают прокладку наиболее вероятного маршрута ее движения.
Заявляемый способ поясняется чертежами, на которых показаны:
на фиг. 1 - обобщенный алгоритм прокладки маршрута движения подвижных объектов на пересеченной местности;
на фиг. 2 - фрагмент местности, разбитый на элементарные участки;
на фиг. 3 - модель тактических свойств местности района сбора информации для одного из видов транспортных средств;
на фиг. 4 - характеристики различных групп подвижных объектов по перемещению;
на фиг. 5 - характеристики грунтов и возможности по проходимости пересеченной местности различными транспортными средствами;
на фиг. 6 - характеристики местности, учитываемые при размещении различных подвижных объектов;
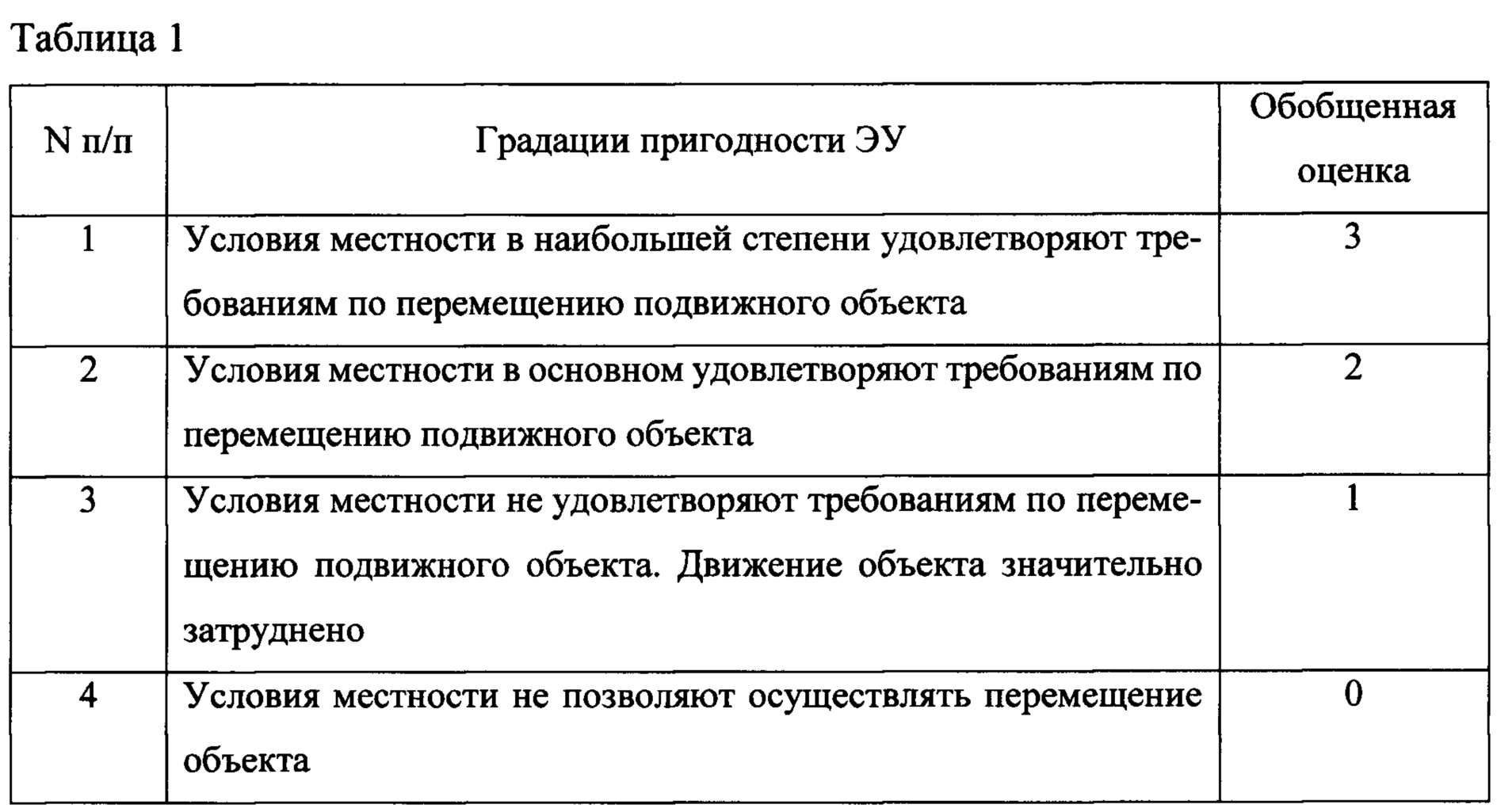
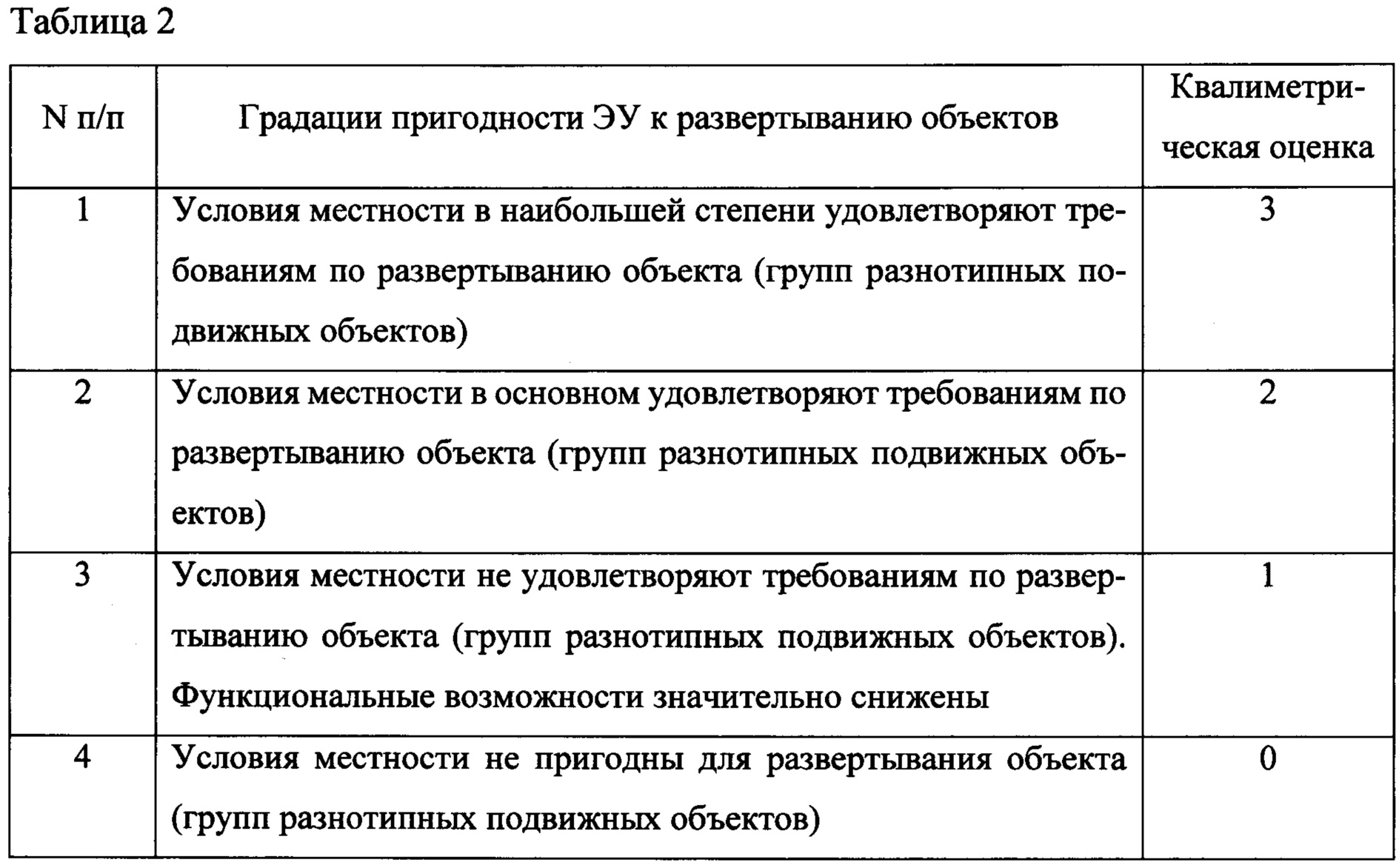
на фиг. 7 - варианты пригодности элементарных участков для размещения объекта и соответствующие им обобщенные (квалиметрические) оценки;
на фиг. 8 - тайл результатов расчета конечных точек  и маршрутов движения к ним.
и маршрутов движения к ним.
Сущность изобретения состоит в следующем. Известно, что задача прокладывания маршрута движения по пересеченной местности является актуальной и в настоящее время достаточно широко освещена в литературе. Последняя предполагает знание координат точки старта A (X,Y)A и финиша В (X,Y)B, учет тактических свойств местности в совокупности с рядом инженерных признаков.
В предлагаемом способе в определенном смысле решают обратную задачу. Априорно неизвестны координаты точек A (Х,Y)Аи В (X,Y)B, состав группы подвижных объектов и решаемые ими задачи. На основе мониторинга (с помощью летно-подъемных или радиотехнических средств), обнаруживают некоторую промежуточную точку А' с координатами (X,Y)'A местоположения колонны ПО в момент времени  . На основе анализа состава обнаруженных ПО определяют их оперативно-тактическую принадлежность. Транспортная база ПО позволяет судить о средней скорости движения колонны. Анализ оперативной обстановки в зоне сбора информации, особенностей рельефа местности в совокупности с другими показателями позволяет определить возможные позиционные районы
. На основе анализа состава обнаруженных ПО определяют их оперативно-тактическую принадлежность. Транспортная база ПО позволяет судить о средней скорости движения колонны. Анализ оперативной обстановки в зоне сбора информации, особенностей рельефа местности в совокупности с другими показателями позволяет определить возможные позиционные районы  , i=1, 2, …, I, в один из которых следует колонна ПО. Далее на основе известной методики прокладывают оптимальные маршруты движения колонны ПО до всех возможных позиционных районов. Самый короткий из них является наиболее вероятным маршрутом движения обнаруженной колонны ПО.
, i=1, 2, …, I, в один из которых следует колонна ПО. Далее на основе известной методики прокладывают оптимальные маршруты движения колонны ПО до всех возможных позиционных районов. Самый короткий из них является наиболее вероятным маршрутом движения обнаруженной колонны ПО.
Рассмотрим более подробно предлагаемый способ. На подготовительном этапе (см. фиг. 1) определяют границы района сбора информации, отображают его с использованием электронных карт геоинформационной системы (ГИС) «Панорама» (см. Обзор отечественных ГИС военного назначения. Электронный ресурс: www.gistechnik.ru; Геоинформационные системы военного назначения (теория и практика применения): сборник тезисов докладов Республиканской научно-методической конференции 24 апреля 2014 года. - Минск: БГУ, 2014. - 65 с.) и цифровых моделей местности (ЦММ). Отображению подлежат тактические и инженерные свойства местности, сезонные климатические условия, тактико-технические характеристики средств перемещения и подвижных объектов в целом, используемые в районе сбора информации, и другая необходимая для анализа информация.
В качестве последней могут выступать сведения о разрушенных мостах и виадуках, непроходимых разрушениях в городской черте, затоплениях и др.
Основой для разработки ЦММ являются электронные карты, ГИС, аэрофотосъемки участков местности, военно-географическое описание местности, данные, позволяющие прогнозировать маршруты движения и районы размещения объектов и их элементов, возможные разрушения и затопления, проходимость местности и др. В результате ЦММ позволяют заблаговременно:
оценить в заданном районе проходимость, маскировочные свойства, возможности инженерного оборудования, защитные свойства и др.;
получить обобщенную оценку различных участков местности по совокупности их тактических свойств;
выделить в пределах района сбора информации (РСИ) участка местности, наиболее вероятные с точки зрения размещения в их пределах объектов того или иного типа.
Получить точную интегральную оценку свойств местности по всему заданному району практически невозможно. Поэтому на подготовительном этапе РСИ делят на элементарные участки (ЭУ) и по каждому из них проводят оценку тактических свойств местности (ТСМ). Следует различать оценки проходимости различных транспортных средств на местности и пригодность ЭУ для размещения объектов.
При анализе проходимости транспортных средств на местности учитывают: продольные и поперечные углы скатов относительно направления движения, плотность грунта, густоту леса (кустарника), мощность растительного покрова, глубину водной преграды с учетом плотности дна, интенсивность гололедных явлений, глубину снежного покрова, толщину льда (см. Военная топография. Под ред. А.С. Николаева. - М.: Военное издательство, 1977 г.). Каждому из учитываемых параметров местности соответствует частный коэффициент проходимости. По результатам оценки совокупности частных коэффициентов ТСМ каждому элементарному участку дается обобщенная оценка, характеризующая его пригодность для прохождения конкретного типа транспортного средства (тяжелая, средняя гусеничная техника, БТР, тяжелая автомобильная техника, средняя легкая автомобильная техника и др.). Вариант градации пригодности ЭУ для прохождения конкретного типа транспортного средства и соответствующие им оценка приведены в Таблице 1.
Таким образом, ЦММ в пределах РСИ для каждого типа транспортного средства можно получить путем разбиения этого района на ЭУ определенного размера (см. фиг. 2) и вычисления для них обобщенной оценки ТСМ.
Модель ТСМ для каждого ТС представляют в виде матрицы размером  , элементами которой являются обобщенные оценки ТСМ элементарных участков (см. фиг. 3).
, элементами которой являются обобщенные оценки ТСМ элементарных участков (см. фиг. 3).
В результате оценки, выполненной на предварительном этапе, определяют участки, удовлетворяющие требованиям по передвижению разнообразных транспортных средств, а ЭУ с низкой квалиметрической (обобщенной) оценкой исключают из дальнейшей обработки.
Далее в заданном районе сбора информации на электронной карте ГИС прокладывают линию соприкосновения войск. Эта информация постоянно уточняется в соответствии с изменениями оперативной обстановки.
В процессе работы обнаруживают колонну или группу движущихся объектов. Операция обнаружения может быть выполнена различными способами: с летно-подъемных средств (на базе спутника, самолета, беспилотного летательного аппарата) средствами визуального или радио и -радиотехнического мониторинга, наземными средствами радиомониторинга. Определяют координаты обнаруженной группы подвижных объектов (X,Y)'A, ее состав и принадлежность в соответствии со штатным расписанием. Здесь под мобильными объектами понимают аппаратные различного назначения, самоходные артустановки, танки и т.д. Определяют среднюю скорость движения колонны в соответствии с фиг. 4. В случае следования в колонне нескольких классов транспортных средств, выбирают наименьшую из них.
На следующем этапе определяют координаты  , i=1, 2, …, I, возможных позиционных районов, в один из которых следует обнаруженная колонна. При решении этой задачи необходимо учитывать оперативную обстановку в РСИ (оборона - наступление, направление главного удара и др.), оперативно-тактические требования по размещению объектов на местности (см. фиг. 7) и тактические свойства местности (см. фиг. 5).
, i=1, 2, …, I, возможных позиционных районов, в один из которых следует обнаруженная колонна. При решении этой задачи необходимо учитывать оперативную обстановку в РСИ (оборона - наступление, направление главного удара и др.), оперативно-тактические требования по размещению объектов на местности (см. фиг. 7) и тактические свойства местности (см. фиг. 5).
На этом этапе выполняют оценку тактических свойств ранее полученных элементарных участков РСИ по инженерным признакам, соответствию требованиям по размещению объектов (групп подвижных объектов) на местности, определение условных номеров ЭУ  , соответствующих заданной номенклатуре участков района (фиг. 7). Обобщенная оценка ТСМ
, соответствующих заданной номенклатуре участков района (фиг. 7). Обобщенная оценка ТСМ  отражает пригодность ЭУ для размещения на нем объекта k-го типа, k=1, 2, …, K; K - количество типов объектов, - номер элементарного участка.
отражает пригодность ЭУ для размещения на нем объекта k-го типа, k=1, 2, …, K; K - количество типов объектов, - номер элементарного участка.
Обобщенная оценка ЭУ по размещению k-го типа объекта складывается из набора частных оценок по:
условиям проходимости -  ;
;
маскировочным свойствам -  ;
;
защитным свойствам -  ;
;
возможности инженерного оборудования ЭУ -  ;
;
обеспечение электронной доступности для организации радиосвязи -  (см. Агеев П.А., Копичев О.А., Кудрявцев A.M. Имитация ЭМО на основе автоматных моделей мобильных объектов с установленными РЭС // Радиотехника: Успехи современной радиоэлектроники. №5. - М., 2016. - С.65-69.)
(см. Агеев П.А., Копичев О.А., Кудрявцев A.M. Имитация ЭМО на основе автоматных моделей мобильных объектов с установленными РЭС // Радиотехника: Успехи современной радиоэлектроники. №5. - М., 2016. - С.65-69.)
На основании частных оценок ТСМ определяют обобщенную оценку ТСМ для каждого ЭУ в соответствии со следующим правилом:

Значение отражает степень пригодности ЭУ для развертывания объекта k-го типа. При необходимости развернуть в одном позиционном районе К типов подвижных объектов по каждому из них выполняют анализ пригодности ЭУ. При этом в качестве результирующей оценки выбирают наихудшую из полученных.
Результатом оценки местности является определение участков, удовлетворяющих требованиям по размещению объектов (элементов объектов или мобильных объектов) на местности, а ЭУ с низкой квалиметрической оценкой исключают из дальнейшей обработки (см. Таблицу 2).
Элементарные участки, пригодные для развертывания и имеющие общие точки соприкосновения, объединяют в единые районы и определяют их общую площадь в соответствии с выражением

где S0 - площадь ЭУ, n - число ЭУ, имеющих общие точки соприкосновения.
Далее значение Sn сравнивают с требуемой площадью  для развертывания N-ro объекта. При выполнении неравенства
для развертывания N-ro объекта. При выполнении неравенства  полагают, что данный участок местности может быть выбран в качестве одного из I возможных позиционных районов развертывания колонны подвижных объектов с координатами
полагают, что данный участок местности может быть выбран в качестве одного из I возможных позиционных районов развертывания колонны подвижных объектов с координатами  . Аналогично определяют местоположение остальных возможных районов развертывания
. Аналогично определяют местоположение остальных возможных районов развертывания  , i=1, 2, …, I.
, i=1, 2, …, I.
Имея исходную точку А' с координатами (X,Y)'A и координаты возможных позиционных районов  приступают к прокладыванию возможных маршрутов движения обнаруженной колонны подвижных объектов. Эту операцию осуществляют на основе ранее полученных результатов по оценке проходимости ЭУ (см. Таблицу 1) для каждого типа транспортных средств. Из точки А' прокладывают все возможные маршруты движения до каждого предполагаемого позиционного района (точка Bi, i=1, 2, …, I). В рамках каждого позиционного района определяют оптимальный (наикратчайший и требующий минимальные временные затраты) путь к нему и минимальное время прибытия колонны подвижных объектов. Далее определяют i-й позиционный район с минимальным временем прибытия в него обнаруженной колонны объектов. В качестве наиболее вероятного принимают оптимальный маршрут движения колонны группы подвижных объектов в этот позиционный район (см. фиг. 8).
приступают к прокладыванию возможных маршрутов движения обнаруженной колонны подвижных объектов. Эту операцию осуществляют на основе ранее полученных результатов по оценке проходимости ЭУ (см. Таблицу 1) для каждого типа транспортных средств. Из точки А' прокладывают все возможные маршруты движения до каждого предполагаемого позиционного района (точка Bi, i=1, 2, …, I). В рамках каждого позиционного района определяют оптимальный (наикратчайший и требующий минимальные временные затраты) путь к нему и минимальное время прибытия колонны подвижных объектов. Далее определяют i-й позиционный район с минимальным временем прибытия в него обнаруженной колонны объектов. В качестве наиболее вероятного принимают оптимальный маршрут движения колонны группы подвижных объектов в этот позиционный район (см. фиг. 8).
На завершающем этапе отображают все рациональные маршруты перемещения и время прибытия обнаруженной группы мобильных объектов в возможные районы развертывания в РСИ на фоне электронных карт ГИС, выделяют наиболее вероятный маршрут и позиционный район. Представляют полученные данные потребителям информации в формализованном виде.
Достигнутым результатом является построение вероятных маршрутов движения обнаруженной группы подвижных объектов по пересеченной местности в условиях априорной неопределенности конечного пункта следования. Анализ ТСМ на основе достаточного числа частных и обобщенного показателей эффективности на подготовительном этапе, использование ЦММ позволил существенно снизить временные затраты на прокладку наиболее вероятных маршрутов движения подвижных объектов.
Способ прокладывания маршрута движения подвижных объектов по пересеченной местности, включающий определение границ района сбора информации на цифровой карте геоинформационной системы, деление района сбора информации на элементарные участки, оценку элементарных участков района сбора информации по тактическим свойствам местности и инженерным признакам, определение элементарных участков района сбора информации, в которых возможно передвижение объектов, исключение из анализа непроходимых элементарных участков, определение типа и характеристик транспортных средств, используемых для перемещения объектов в районе сбора информации, анализ проходимых элементарных участков района сбора информации по различным частным критериям, отличающийся тем, что в районе сбора информации отображают положение линии барьерного рубежа, после обнаружения группы подвижных объектов определяют ее координаты (X,Y)', состав, возможную принадлежность и среднюю скорость перемещения, с учетом оперативной обстановки в районе сбора информации, оперативного предназначения, частных и обобщенного критериев оценки возможного размещения группы объектов на местности определяют координаты возможных позиционных районов , i=1, 2, … I, в один из которых следует группа подвижных объектов, формируют возможные маршруты движения группы подвижных объектов из точки с координатами (X,Y)' ко всем I возможным позиционным районам, определяют оптимальный маршрут движения группы подвижных объектов до каждого возможного позиционного района, вычисляют время прибытия подвижных объектов в позиционные районы по оптимальному маршруту, находят i-й позиционный район с минимальным временем прибытия в него группы подвижных объектов, а в качестве наиболее вероятного принимают оптимальный маршрут движения группы подвижных объектов в этот позиционный район.


Способ выбора безопасного маршрута в сети связи общего пользования
Способ определения координат источника радиоизлучения с использованием летательного аппарата
Способ кодирования оцифрованных изображений с использованием адаптивного ортогонального преобразования
Способ поиска затонувших объектов
Широкополосная рупорно-микрополосковая антенна
Широкополосная антенна ультракоротковолнового диапазона
Широкополосное приемопередающее устройство с программной перестройкой фазы сигнала
Способ формирования сигнала с псевдослучайной перестройкой рабочей частоты
Система защиты информации от несанкционированного доступа
Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы
Валковый грохот
Способ хирургического лечения коарктации аорты в сочетании с гипоплазией дистальной части дуги аорты
Способ борьбы с артиллерией противника
Способ создания ретранслированных помех
Способ селекции цифровых потоков
Способ и устройство определения координат источников радиоизлучения
Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации
Способ и устройство активной радиомаскировки местоположения земной станции
Бортовая антенна для беспилотного летательного аппарата
Разностно-дальномерный способ определения координат источника радиоизлучения

