Результат интеллектуальной деятельности: Устройство (варианты) и способ для контроля перепада давления и расхода в насосе
Вид РИД
Изобретение
РОДСТВЕННЫЕ ЗАЯВКИ
Для данной заявки испрашивается приоритет по предварительной заявке №61/976,749 на патент США (дело №911-019.014-1//F-B&G-X0012US01), поданной 8 апреля 2014 года, под названием "Средство бессенсорного преобразования по методу наилучшего приближения для контроля перепада давления и расхода в насосе", которая включена в текст данной заявки посредством ссылки.
Настоящая заявка также относится к технологиям, разработанным по меньшей мере одним из изобретателей предлагаемого изобретения и раскрытым в следующих заявках:
1) заявка №12/982,286 на патент США (дело №911-019.001-1//F-B&G-1001), поданная 30 декабря 2010 года под названием "Способ и устройство для управления насосом с использованием кривой характеристик соответствующей регулируемой системы, также известной как кривая адаптивного управления", по которой 15 апреля 2014 года выдан патент США №8,700,221;
2) заявка №13/717,086 на патент США (дело №911-019.004-2//F-B&G-Х0001), поданная 17 декабря 2012 года под названием "Способы динамического линейного управления и устройство для управления насосом с переменным расходом", в которой испрашивается приоритет по предварительной заявке №61/576,737 на патент США, поданной 16 декабря 2011 года, которая в настоящее время отозвана;
3) заявка №14/091,795 на патент США (дело №911-019.009-2//F-B&G-Х0005), поданная 27 ноября 2013 под названием "Способ и устройство для трехмерного бессенсорного преобразования", в которой испрашивается приоритет по предварительной заявке №61/771375 на патент США, поданной 1 марта 2013 года и в настоящее время отозванной;
4) заявка №14/187,817 на патент США (дело №911-019.010-2//F-B&G-Х0008), поданная 24 февраля 2014 года под названием "Смешанный теоретический и дискретный бессенсорный преобразователь для контроля перепада давления и расхода в насосе", в которой испрашивается приоритет по предварительной заявке №61/803,258 на патент США, поданной 19 марта 2013 года и в настоящее время отозванной;
5) заявка №14/339,594 на патент США (дело №911-019.012-2//F-B&G-X0010US01), поданная 24 июля 2014 года под названием "Наилучшее приближение и подобие. Бессенсорный преобразователь для контроля перепада давления и расхода в насосе", в которой испрашивается приоритет по предварительной заявке №61/976,749 на патент США (дело №911-019.012-1//F-B&G-X0010US01), поданной.8 апреля 2014 года; и
6) предварительная заявка №62/007,474 на патент США (дело №911-019.015-1//F-B&G-X0013), поданная 4 июня 2014 года под названием "Система и устройство для адаптивного управления расходом - система эксплуатационного управления с минимальной энергией для нагнетания в сравнении с бессенсорным вариантом применения».
Все вышеперечисленные заявки переуступлены патентообладателю данной заявки и включены в нее посредством ссылки.
Настоящее изобретение основано на технологиях, раскрытых в вышеуказанных заявках.
УРОВЕНЬ ТЕХНИКИ
1. Область изобретения
Предлагаемое изобретение относится к способу управления работой насоса; в частности, настоящее изобретение относится к способу и устройству для управления и/или контроля работы насоса, к примеру, насосов для бытовых и промышленных систем нагревания или охлаждения воды.
2. Краткое описание уровня техники
Введение
Из уровня техники известны технологии бессенсорного управления и контроля работы жидкостной насосной системы, к примеру, трехмерный дискретный способ и смешанный теоретический трехмерный дискретный способ бессенсорного преобразования, описанные в заявках, указанных выше под номерами 3-5. Значения давления и расхода потока в системе могут быть определены непосредственно по паре считанных значений двигателя с ошибкой преобразования около 5-15% посредством трехмерного дискретного бессенсорного преобразователя, например, на основе данных калибровки насоса, как указано в заявке под номером 4. С другой стороны, бессенсорный преобразователь для осуществления смешанного теоретического и дискретного преобразования, описанный в заявке под номером 3, выдает ошибку преобразования около 10-20% без необходимости калибровки приборов, при этом по-прежнему необходимо получить данные о распределении мощности с учетом коэффициента системы и скорости двигателя для преобразования указанного коэффициента системы для регулируемой жидкостной системы.
Бессенсорная калибровка данных насосов, в том числе оснащение приборами и получение данных, является интересной темой для обсуждения, и не может быть легко реализована из-за нехватки датчиков давления и расхода для большинства вариантов применений насосов. В действительности, сбор калибровочных данных для бессенсорной системы для насоса и двигателя может быть довольно продолжительным и утомительным, даже в условиях производственных сборочных линий, не говоря уже об использовании дорогостоящих приборов для получения данных и установок для испытания жидкостных насосных систем. Таким образом, изобретатели, подавшие настоящую заявку, признают и принимают во внимание то, что бессенсорное средство или метод, которые исключают или снижают необходимость калибровки данных, могут быть более выгодными для большей части насосных установок с бессенсорным управлением.
Для динамической жидкостной системы, расход которой регулируется с помощью клапанов или управляющих устройств, коэффициент характеристик эквивалентной жидкостной системы является неизвестной переменной, которая, по существу, зависит от открытого положения клапанов, а также от потерей на динамическое трение в системе. В такой регулируемой жидкостной системе эффективность насоса является изменяемой переменной из-за задержки скорости двигателя при изменяемой жидкостной нагрузке, а также вследствие определенных эффектов теплового потребления, обусловленных механическим трением в насосе, в частности, при низкой скорости, когда система почти отключена. Таким образом, изобретатели данной заявки также признают и принимают во внимание, что довольно затруднительно сформулировать какие-либо теоретические выражения для создания бессенсорного преобразователя насоса, выполненного с возможностью определения значений давления и расхода в системе непосредственно на основе считанных значений двигателя, таких как мощность, ток, крутящий момент, скорость и т.п.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В целом, согласно заявленному изобретению предложено новое и уникальное средство или способ бессенсорного преобразования по методу наилучшего приближения для получения значений давления и расхода в насосе или системе на основе пары считанных значений мощности и скорости двигателя, к примеру, используя уравнения характеристик насоса и системы и эмпирическое уравнение мощности. Уравнение характеристик насоса и эмпирическое уравнение мощности могут быть выражены в виде многочлена наилучшего приближения в соответствии с законами подобия для насосов в явной или преобразованной форме, к примеру, на основе кривой насосных характеристик, предоставленной производителями насосов. Таким образом, значения давления и расхода в системе в точке равновесия давления в насосе и системе при установившемся режиме работы могут быть выражены в виде уравнений характеристик насоса и системы, а также эмпирического уравнения мощности. Указанное бессенсорное устройство и способ, описанные в данной заявке, могут быть преимущественными для большинства практических применений бессенсорного управления и контроля жидкостных насосов, обеспечивая достаточно высокую точностью без необходимости выполнения калибровки приборов.
В данной заявке предложен способ, представляющий собой дальнейшее развитие вышеуказанных технологий и основанный на них.
ВАРИАНТЫ ВЫПОЛНЕНИЯ
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может включать или представлять собой устройство, содержащее процессор или процессорный модуль обработки сигналов, выполненный с возможностью осуществления по меньшей мере следующих функций:
приема сигналов, содержащих информацию о считанных значениях мощности и скорости двигателя, а также об уравнениях характеристик насоса и системы и эмпирических уравнений мощности, выраженных в виде многочлена наилучшего приближения в соответствии с законами подобия для насосов на основе кривой насосных характеристик, предоставленной производителем насоса, и
определения соответствующих сигналов, содержащих информацию о давлении и расходе в насосе или системе с учетом считанных значений мощности и скорости двигателя, содержащихся в полученных сигналах.
Во время эксплуатации процессор или процессорный модуль обработки сигналов может быть выполнен с возможностью определения перепада давления и расхода в насосе в точке равновесия давления в насосе или системе при установившемся режиме работы двигателя.
При эксплуатации указанный процессор или процессорный модуль 10а обработки сигналов может быть также выполнен с возможностью получения соответствующих сигналов, содержащих информацию о давлении и расходе в насосе или системе, в том числе для контроля перепада давления и расхода в насосе. Указанные соответствующие сигналы могут быть использованы для управления жидкостной насосной системой.
Могут быть также предложены варианты выполнения, в которых указанное устройство содержит или представляет собой жидкостную насосную систему, содержащую, к примеру, указанный процессор или процессорный модуль обработки сигналов.
Полученные сигналы могут быть определены и получены посредством соответствующих датчиков, выполненных с возможностью измерения считанных значений мощности и скорости двигателя.
Полученные сигналы могут быть сохранены и получены из соответствующих модулей запоминающих устройств, которые, к примеру, могут содержать уравнения характеристик насоса и системы и эмпирические уравнения мощности, выраженные в виде многочлена наилучшего приближения в соответствии с законами подобия для насосов на основе кривой насосных характеристик, предоставленной производителем насоса.
В качестве примера, указанный процессор или процессорный модуль обработки сигналов может содержать или представлять собой по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, содержащей компьютерный программный код, причем указанное по меньшей мере одно запоминающее устройство и компьютерный программный код при наличии по меньшей мере одного процессора выполнены с возможностью обеспечения по меньшей мере следующих функций указанного процессора или процессорного модуля обработки сигналов: приема сигналов (или, например, связанных с ними сигналов) и определения регулируемого значения давления. Указанный процессор или процессорный модуль обработки сигналов может содержать соответствующий компьютерный программный код для осуществления необходимых алгоритмов обработки сигналов и/или функционального назначения согласно изложенному в настоящей заявке.
Предлагаемое устройство может содержать или представлять собой устройство управления насосом или контроллер, в том числе в виде ПИД (пропорционально-интегрально-дифференциального) регулятора, содержащего указанный процессор или процессорный модуль обработки сигналов, к примеру, выполненный, в том числе, с возможностью контроля перепада давления и расхода в насосе.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено в качестве способа, включающего следующие этапы: посредством процессора или процессорного модуля обработки сигналов принимают сигналы, содержащие информацию о считанных значениях мощности и скорости двигателя, а также об уравнения характеристик насоса и системы и эмпирических уравнениях мощности, которые выражены в виде многочлена наилучшего приближения в соответствии с законами подобия для насосов на основе кривой насосных характеристик, предоставленной производителем насоса; посредством указанного процессора или процессорного модуля обработки сигналов определяют соответствующие сигналы, содержащие информацию о давлении и расходе в насосе или системе с учетом считанных значений мощности и скорости двигателя, которые содержались в принятых сигналах.
Указанный способ также может содержать по меньшей мере один из указанных признаков, в том числе может включать этап, на котором посредством указанного процессора или процессорного модуля обработки сигналов обеспечивается подача соответствующих сигналов, содержащих информацию о давлении и расходе в насосе или системе, которая, к примеру, может быть использована для управления жидкостной насосной системой.
Предлагаемое изобретение также может быть выполнено, к примеру, в виде компьютерного программного продукта, содержащего машиночитаемый носитель с компьютерным исполняемым кодом, встроенным в данный носитель для осуществления указанного способа, например, посредством устройства обработки сигналов, входящего в состав такого контроллера для насоса. К примеру, данный компьютерный программный продукт может быть выполнен в виде компакт-диска, гибкого диска, флеш-накопителя, карты памяти, а также накопителей другого типа или вида, выполненных с возможностью хранения соответствующего компьютерного исполняемого кода на машиночитаемом носителе, который является известным на настоящее время или будет разработан в будущем.
В заключение следует отметить, что согласно описанным в данной заявке вариантам выполнения предложено средство или способ бессенсорного преобразования по методу наилучшего приближения для определения давления и расхода в насосе или системе с учетом пары считанных значений, а именно мощности и скорости двигателя, например, на основе уравнений характеристик насоса и системы и эмпирических уравнений мощности. Уравнение характеристик насоса и эмпирическое уравнение мощности могут быть выражены в виде многочлена наилучшего приближения в соответствии с законами подобия для насосов, полученными на основе кривой насосных характеристик, предоставленной производителями насосов, который, к примеру, может быть сохранен в соответствующем модуле запоминающего устройства и обработан. Значения перепадов давления и расхода в насосе могут быть определены в точке равновесия давления в насосе и системе при установившемся режиме двигателя, соответственно. Описанные в данном документе средство или способ бессенсорного преобразования для насоса могут быть легко осуществлены в большинстве возможных практических применений для управления и контроля жидкостного нагнетания, при этом обеспечивая достаточную точность.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи содержат следующие фигуры, которые необязательно выполнены в масштабе.
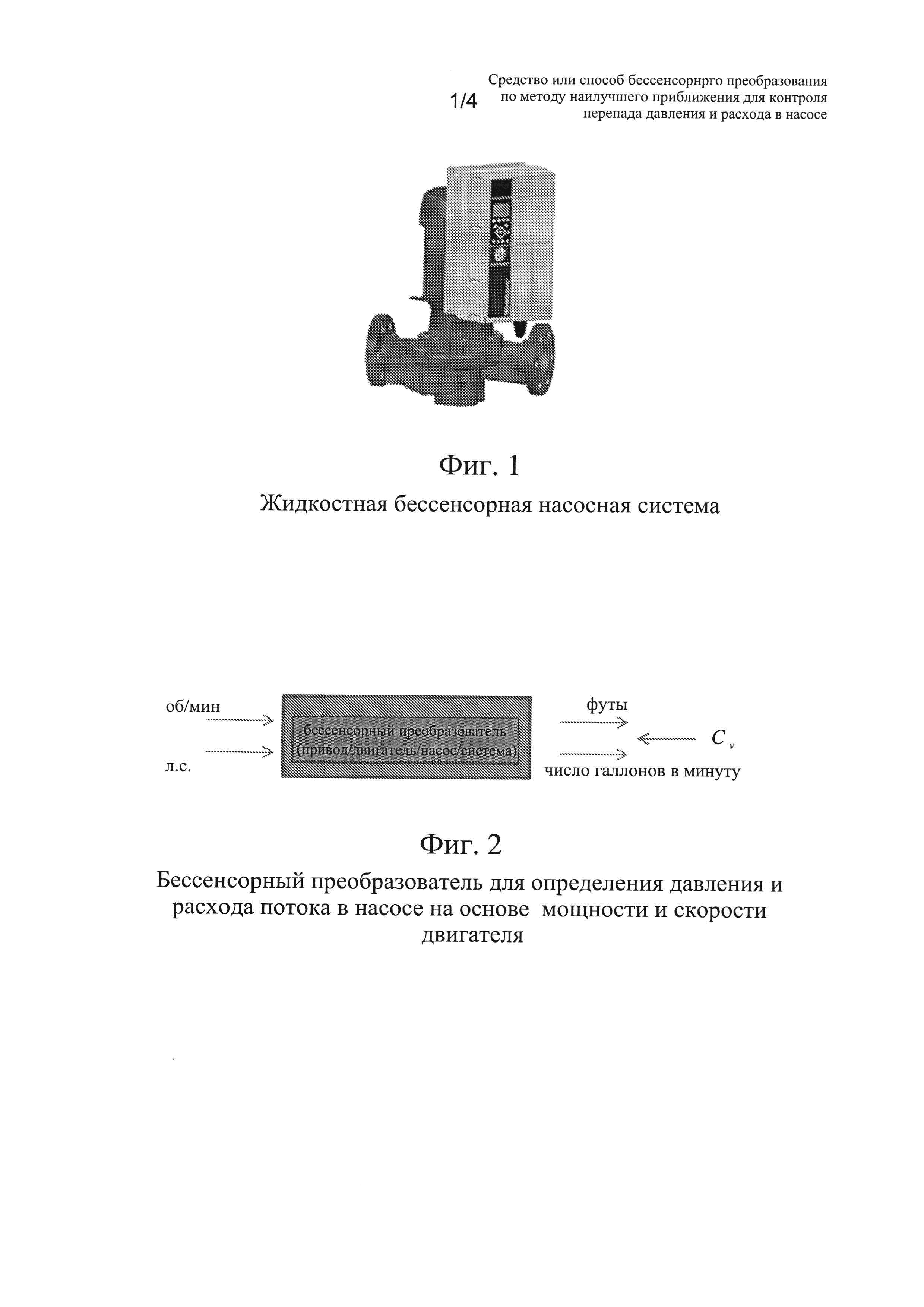
Фиг. 1 схематично изображает жидкостную бессенсорную насосную систему управления, известную из уровня техники, в которой, к примеру, может быть осуществлено предлагаемое изобретение в соответствии с одним из вариантов выполнения.
Фиг. 2 изображает схему бессенсорного преобразования для получения давления и расхода в насосе на основе регистрируемых значений мощности и скорости.
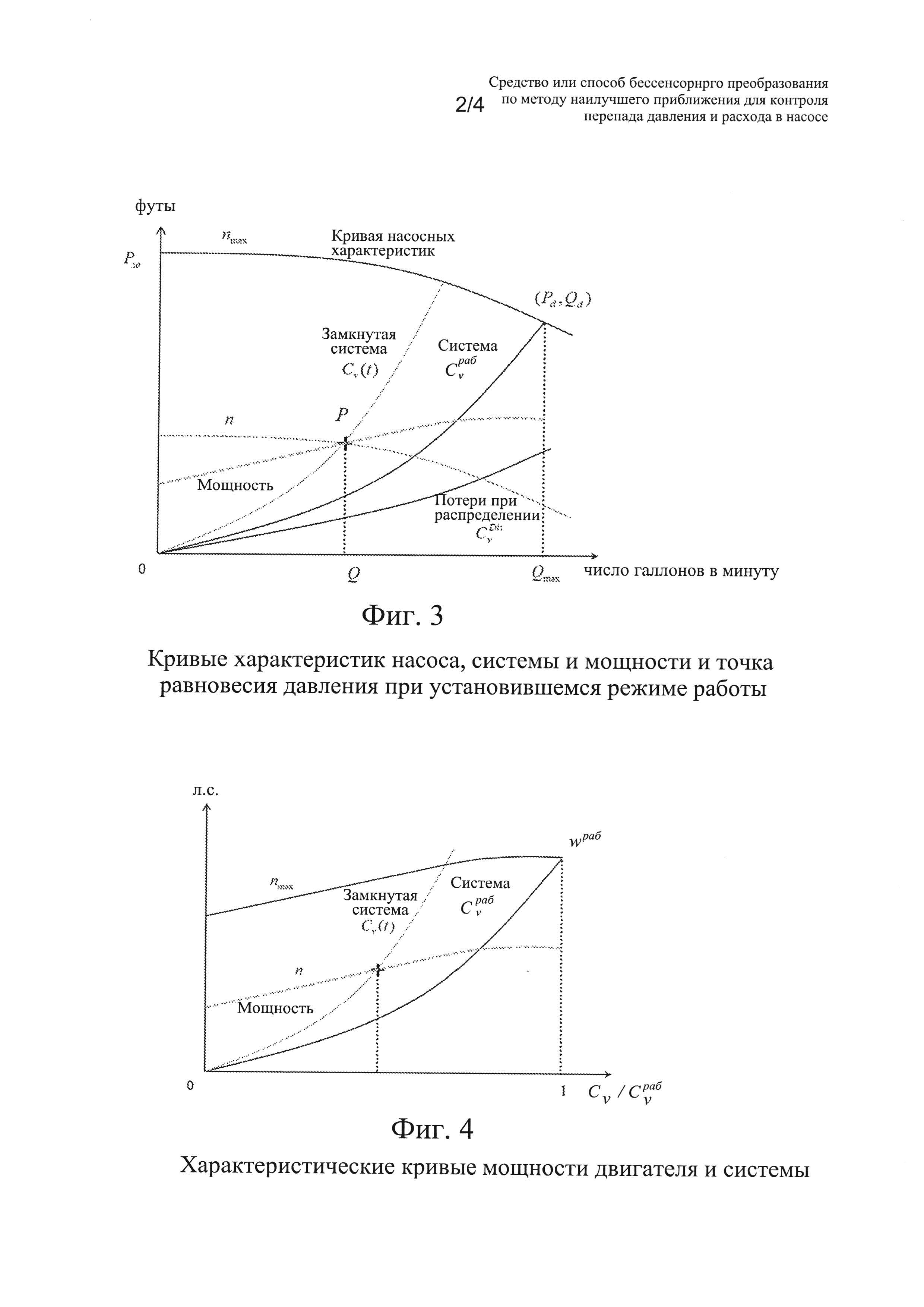
Фиг. 3 изображает график зависимости давления (Ft) от расхода (GPM), на котором показаны кривые характеристик насоса, системы и мощности, а также точка равновесия давления при установившемся режиме работы в соответствии с осуществлением некоторых вариантов выполнения предлагаемого изобретения;
Фиг. 4 изображает график зависимости мощности (в л.с.) от характеристик  системы для расхода (GPM), на котором проиллюстрированы мощность двигателя и системные характеристики в соответствии с осуществлением некоторых вариантов выполнения предлагаемого изобретения.
системы для расхода (GPM), на котором проиллюстрированы мощность двигателя и системные характеристики в соответствии с осуществлением некоторых вариантов выполнения предлагаемого изобретения.
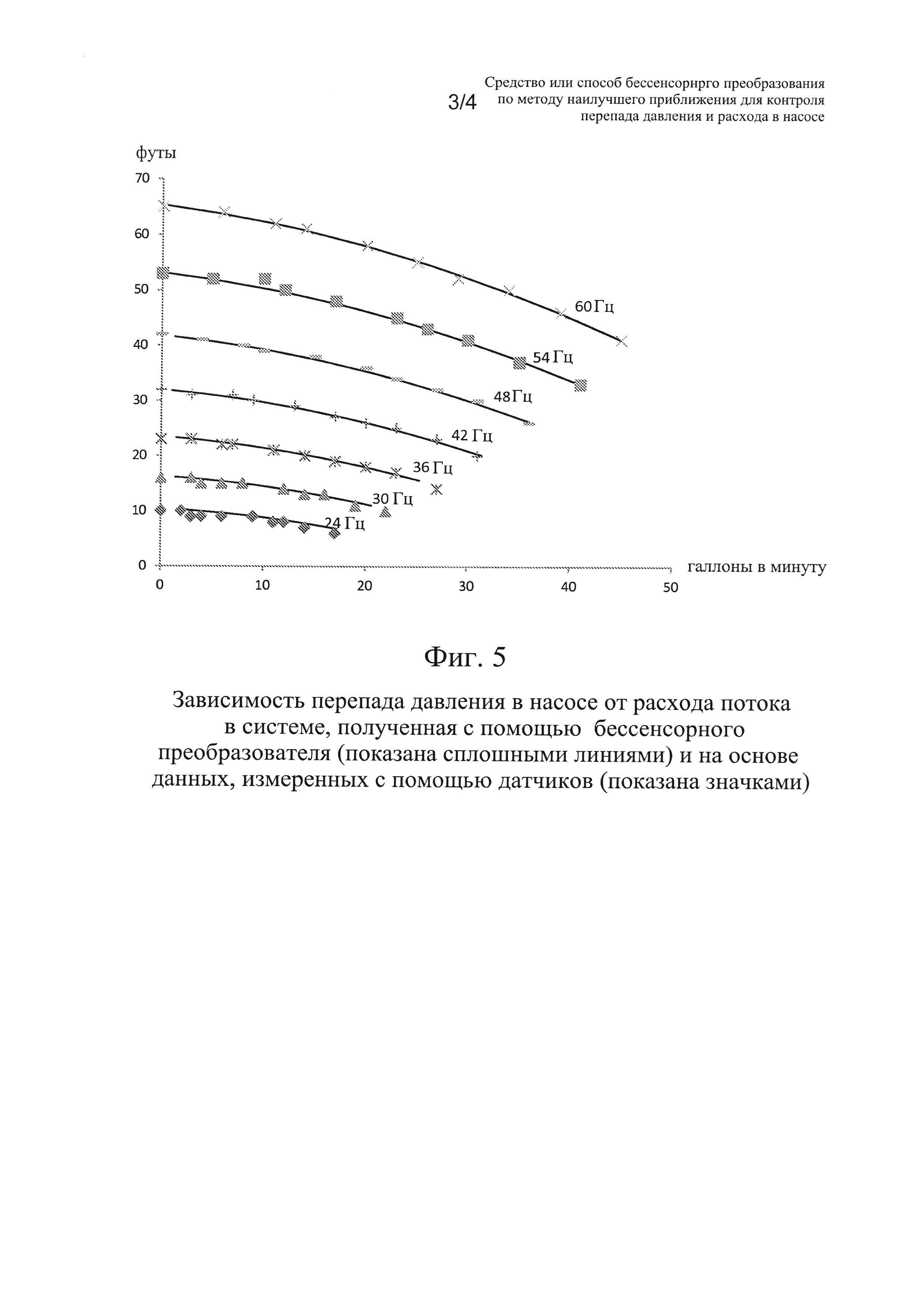
Фиг. 5 изображает график зависимости давления (Ft) от расхода (GPM), на котором показан перепад давления в насосе в зависимости от расхода в системе, определенный посредством бессенсорного преобразователя (показан сплошными линиями) и основанный на данных, измеренных или зарегистрированных с помощью датчиков (показан символами (например, ромбами, треугольниками, звездами, знаками плюса и минуса, квадратами и крестиками)) при различных скоростях, в том числе при 24 Гц, 30 Гц, 36 Гц, 42 Гц, 48 Гц, 54 Гц и 60 Гц.
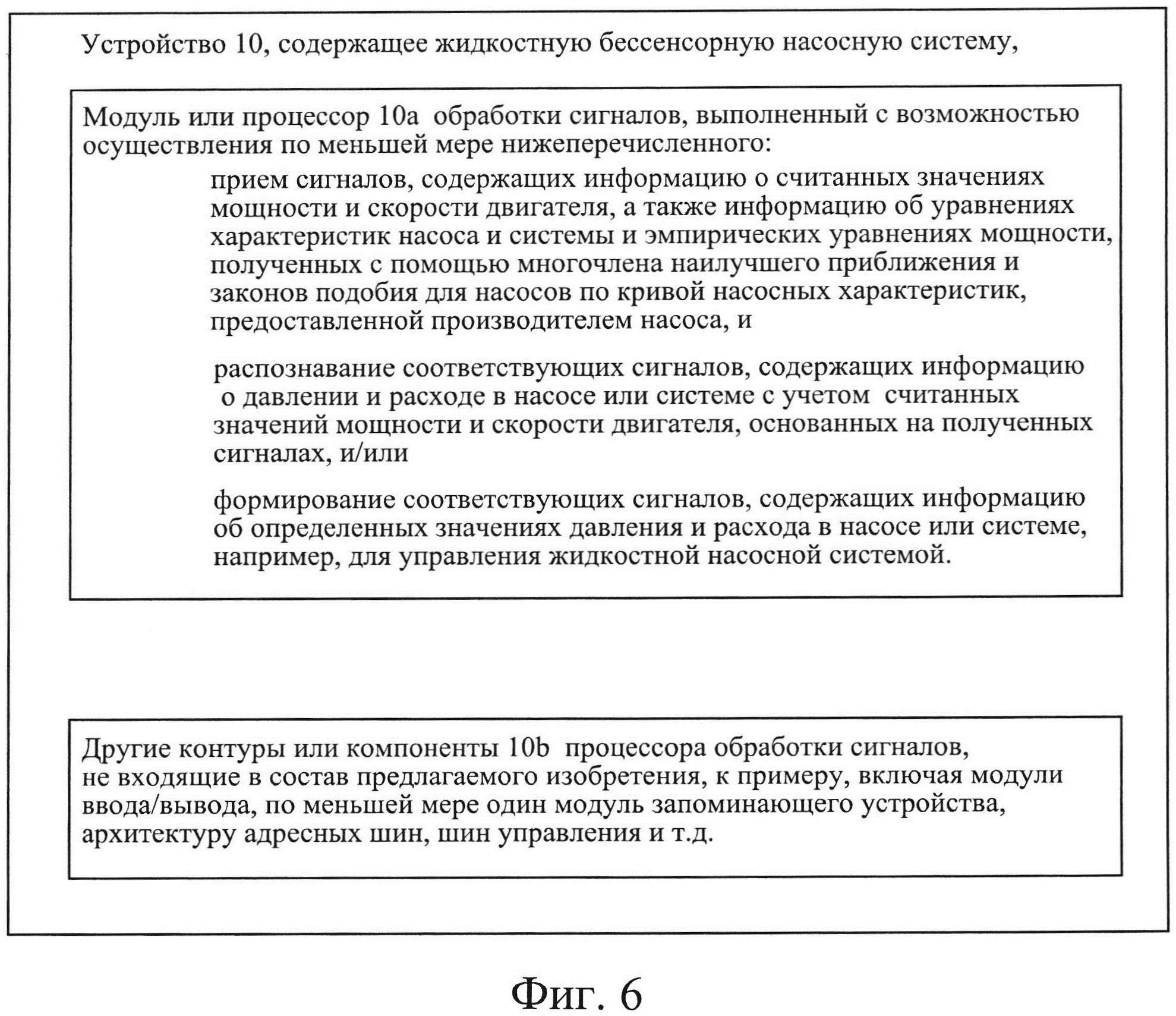
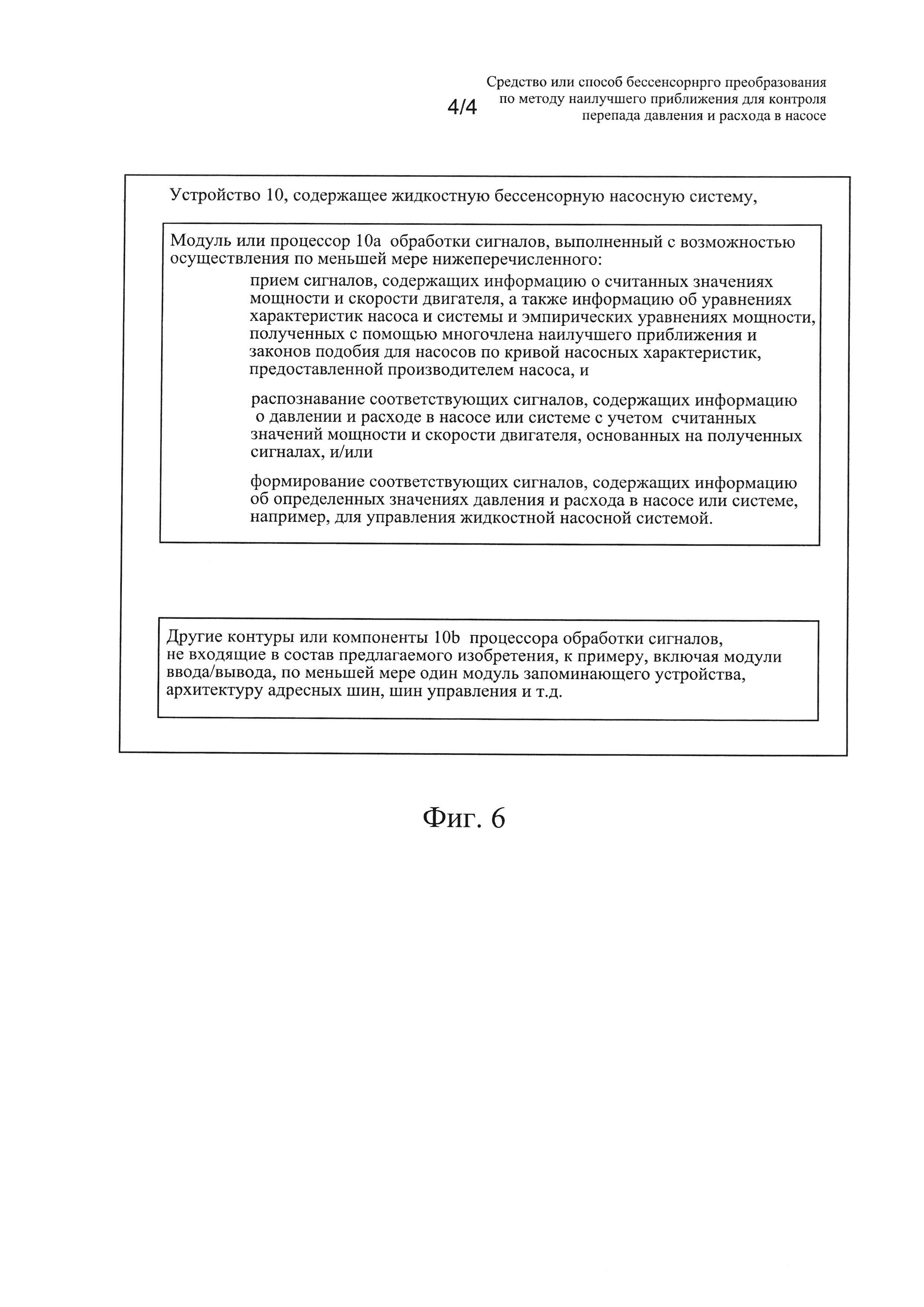
Фиг. 6 изображает блок-схему устройства, например, содержащего процессор или процессорный модуль, предназначенный для осуществления обработки сигналов, в соответствии с некоторыми вариантами выполнения предлагаемого изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 изображает жидкостную бессенсорную систему управления насосом, содержащую центробежный насос, соединенный с системой трубопроводов с потоком и контроллером, в которой, к примеру, может быть осуществлено предлагаемое изобретение. Фиг. 2 схематично изображает бессенсорное преобразование перепада давления и расхода в насосе в соответствии с коэффициентом характеристик эквивалентной жидкостной системы, который изменяется на выпуске насоса, а также мощностью и скоростью двигателя на другом конце привода двигателя. Фиг. 3 схематично изображает кривые характеристик насоса, системы и мощности и соответствующую точку равновесия давления в насосе и системе при установившемся режиме работы для системы с замкнутым контуром, в которой обеспечено стабильное давление всасывания.
В случае системы с замкнутым контуром и стабильным давлением всасывания расход и давление в системе при определенной скорости двигателя и положении системы могут быть определены в точке равновесия давления в насосе и системе при установившемся режиме работы, которая находится на пересечении кривых характеристик насоса и системы, схематично изображенных на Фиг. 3. В данном случае характеристическая кривая насоса для момента времени, которая иллюстрирует зависимость перепада Р давления в насосе от расхода Q и скорости n двигателя, может быть приблизительно представлена в виде многочлена Р=ƒ(Q, n) на основе кривой характеристик насоса при максимальной скорости nmax двигателя и в соответствии с законом подобия для насосов. Таким образом, расход в системе может быть выражен через функцию перепада давления в насосе Р=ƒ(Q, n), а также через уравнение расхода в системе  соответственно. Указанные законы подобия для насосов представляют собой уравнения для расхода в насосе, перепада давления и мощности двигателя, а именно Q/Qmax=n/nmax, Р/Pmax=(n/nmax)2 и w/wmax=(n/nmax)3, соответственно.
соответственно. Указанные законы подобия для насосов представляют собой уравнения для расхода в насосе, перепада давления и мощности двигателя, а именно Q/Qmax=n/nmax, Р/Pmax=(n/nmax)2 и w/wmax=(n/nmax)3, соответственно.
Следуя вышеописанному подходу, например, с использованием функции кривой насосных характеристик второго порядка, преобразованной по методу наилучшего приближения, и уравнения расхода в системе, к примеру, расход в системе может быть выражен в виде следующего Уравнения (1):

где Cν - коэффициент системы, a, b и с - коэффициенты функции кривой характеристик насоса второго порядка, преобразованной по методу наилучшего приближения, при максимальной скорости nmax двигателя. Используемая в данном случае функция для перепада давления в насосе Р=ƒ(Q, n) может быть выражена в виде Уравнения (2):

Следует отметить, что могут быть получены и другие уравнений расхода в системе и перепада давления в насосе, при этом могут быть выбраны другие аппроксимирующие или интерполирующие подходы для построения кривой, например, вместо указанных выражений для аппроксимации или интерполяции может быть применен многочлен третьего порядка.
Для определения расхода и давления в системе в точке равновесия давления при установившемся режиме работы, исходя из заданной пары значений мощности и скорости двигателя, по уравнениям (1) и (2), как правило, вначале должен быть известен соответствующий коэффициент динамической системы. Однако для регулируемой жидкостной системы, в которой расход регулируется с помощью клапанов или других регуляторов расхода, не существует простого теоретического решения в виде формулы. Как описано в данной заявке, может быть использовано соотношение эмпирических значений мощности и характеристик системы, полученных на основе кривой мощности при максимальной скорости nmax двигателя, а также с применением закона подобия, что схематично проиллюстрировано на Фиг. 4. Как показано на чертеже, сначала по методу аппроксимации или интерполяции может быть построен график функции мощности двигателя при максимальной скорости с учетом коэффициента системы. Затем в соответствии с законами подобия для насосов мощность двигателя при заданной скорости двигателя может быть определена, к примеру, как w=(Cν, n).
Следуя, в частности, вышеописанному подходу, и используя функцию мощности второго порядка по методу наилучшего приближения, коэффициент Cν системы может быть точно выражен в виде уравнения (3):
где w - мощность двигателя при скорости n; А, В и С - коэффициенты функции мощности двигателя второго порядка по методу наилучшего приближения при максимальной скорости двигателя с учетом нормированного коэффициента системы. При любом текущем значении скорости функция мощности двигателя w=w(Cν, n)может быть выражена в виде Уравнения (4):
системы. При любом текущем значении скорости функция мощности двигателя w=w(Cν, n)может быть выражена в виде Уравнения (4):

В случае, если для области малых значений скорости может быть предъявлено какое-либо требование к точности, и при этом система находится в практически отключенном состоянии, использование закона подобия для представления мощности насосов может быть недостаточным для обеспечения точного представления зависимости мощности двигателя и скорости из-за сдвигового смещения значений скорости двигателя в данной области значений. Незначительно увеличенное значение мощности в области малых значений скорости в результате приводит к немного увеличенному значению коэффициента системы из обратной зависимости мощности согласно Уравнению (3), а также к немного большему значению расхода по Уравнению (1), соответственно. В таком случае может возникнуть необходимость преобразовать закон подобия для мощности и скорости двигателя, при этом Уравнение (4) может видоизменено как Уравнение (5):

где ƒ*(n) - преобразованный закон подобия, выраженный в виде аппроксимирующего многочлена третьего порядка, а именно в виде Уравнения (6):

где А', В', С' и D' - коэффициенты функции третьего порядка наилучшего приближения для значений мощности, нормированных при максимальной скорости с учетом нормированной скорости двигателя n/nmax. В отличие от закона подобия для мощности насоса w/wmax=(n/nmax)3, преобразованный закон подобия представляет собой аппроксимирующий многочлен третьего порядка, показывающий зависимость мощности и скорости, полученную путем аппроксимирования или интерполирования набора значений мощности, измеренных с учетом набора заданных значений скорости при каком-либо состоянии системы. Поскольку нормированное распределение мощности ƒ*(n) является приблизительно одинаковым при любом состоянии системы, состояние системы при этом может быть любым - от отключенного до полностью включенного. Аналогично, в качестве дополнительного примера следует отметить, что Уравнения 3-6 могут быть представлены в виде каких-либо других выражений, при этом, соответственно, могут быть использованы другие виды аппроксимальных или интерполяционных методов построения кривой.
Таким образом, расход и давление в системе в точке равновесия давления в насосе и системе при скорости двигателя в соответствии с установившимся режимом работы и соответствующим потреблением мощности могут быть определены по Уравнениям (1) и (2), при этом из Уравнений (3) и (4) или (5) соответственно может быть получен коэффициент Cν системы, который в настоящем описании назван бессенсорным преобразователем по методу наилучшего приближения. Благодаря использованию указанного бессенсорного преобразователя по методу наилучшего приближения обеспечивается возможность сбора значений давления и расхода в насосной системе и сравнения их с данными, измеренными с помощью датчиков. Результаты, проиллюстрированные на Фиг. 5, демонстрируют вполне удовлетворительную точность, в основном с ошибкой около 5-10% во всех областях значений скорости от 30 до 60 Гц в при нормальной работе жидкостной зоны насоса и с ошибкой около 10-20% в зоне малых значений скорости и когда система почти отключена.
Описанный в данном описании бессенсорный преобразователь по методу наилучшего приближения может быть использован в большинстве областей применения для управления и контроля жидкостного нагнетания, поскольку данный преобразователь получен из уравнений для характеристик насоса и мощности, а также из закона подобия и преобразован с помощью многочлена наилучшего приближения с учетом данных о насосе, предоставленных производителями насосов. Указанный преобразователь может быть достаточно легко применен, при этом обеспечивая достаточную точность. Однако наиболее важным является то, что его использование поможет исключить необходимость выполнения утомительной и продолжительной калибровки приборов, поскольку данные или кривые предоставлены производителями и являются доступными.
Фиг. 6:
В качестве примера на Фиг. 6 изображено устройство 10, выполненное в соответствии с некоторыми вариантами выполнения предлагаемого изобретения, которое, к примеру, может содержать процессор или процессорный модуль 10а обработки сигналов, выполненный с возможностью осуществления по меньшей мере нижеперечисленных функций:
приема сигналов, содержащих информацию о считанных значениях мощности и скорости двигателя, а также об уравнениях характеристик насоса и системы и эмпирических уравнениях мощности, полученных с помощью многочлена наилучшего приближения и законов подобия для насосов на основе кривой насосных характеристик, предоставленной производителем насоса,
определения соответствующих сигналов, содержащих информацию о давлении и расходе в насосе или системе с учетом считанных значений мощности и скорости двигателя, содержащихся в принятых сигналах.
Указанный процессор или процессорный модуль обработки сигналов может быть выполнен с возможностью определения перепада давления и расхода в насосе в точке равновесия давления в насосе или системе при установившемся режиме работы двигателя в процессе эксплуатации.
Указанный процессор или процессорный модуль 10а обработки сигналов также может быть выполнен с возможностью подачи соответствующих сигналов, содержащих информацию о давлении и расходе в насосе или системе, в том числе для осуществления контроля перепада давления и расхода в насосе. Соответствующие сигналы могут быть использованы для управления жидкостной насосной системой.
Для специалиста в данной области техники будет очевидно и понятно, что предлагаемое изобретение может быть осуществлено с использованием уравнений характеристик насоса и системы и эмпирических уравнений мощности, например, тех, которые описаны в данной заявке, а также с использования других типов или видов уравнений характеристик насоса и системы и эмпирических уравнений мощности, которые известны в настоящее время или будут получены впоследствии в будущем.
Для специалиста в данной области техники будет очевидно и понятно, что предлагаемое изобретение может быть осуществлено с использованием кривых насосных характеристик, предоставленных производителями насосов, к примеру, таких, которые описаны в данной заявке и известны из данной области техники в настоящее время. Однако могут быть осуществлены и другие варианты выполнения в рамках объема предлагаемого изобретения, в которых будут использованы другие типы или виды кривых насосных характеристик, предоставленных изготовителями насосов для тех насосов, которые будут разработаны в будущем.
Для примера следует отметить, что функциональное назначение устройства 10 может быть осуществлено с использованием аппаратного обеспечения, программного обеспечения, программно-аппаратного обеспечения или их комбинации. В случае типового использования программного обеспечения устройство 10 может содержать по меньшей мере одну микропроцессорную архитектуру, содержащую, к примеру, по меньшей мере один процессор или микропроцессор обработки сигналов, представляющий собой элемент 10а. Специалист в данной области техники сможет задать программу для такого устройства на базе микроконтроллера или микропроцессора для осуществления описанного в данной заявке функционального назначения без проведения дополнительных экспериментов. Например, процессор или процессорный модуль 10а обработки сигналов может быть выполнен, к примеру, специалистом в данной области техники с возможностью (без проведения дополнительных экспериментов) приема сигналов, содержащих информацию о считанных значениях мощности и скорости двигателя, а также информацию об уравнениях характеристик насоса и системы и эмпирических уравнений мощности, преобразованных с помощью многочлена наилучшего приближения и законов подобия для насосов, на основе кривой насосных характеристик, предоставленной производителем данного насоса, в соответствии со способом, описанным в данной заявке. К примеру, информация о считанных значениях мощности и скорости двигателя может содержаться в регистрируемых сигналах, полученных, обработанных и/или сохраненных, например, в соответствующем модуле запоминающего устройства, который является частью указанной микропроцессорной архитектуры. Аналогично, к примеру, информация об уравнениях характеристик насоса и системы и эмпирических уравнениях мощности, преобразованная с помощью многочлена наилучшего приближения и законов подобия для насосов с учетом кривой насосных характеристик, предоставленной производителем этого насоса, может быть получена, обработана и/или сохранена в соответствующем модуле запоминающего устройства, который составляет часть указанной микропроцессорной архитектуры.
Кроме этого, процессор или процессорный модуль обработки сигналов 10а может быть выполнен, к примеру, специалистом в данной области техники с возможностью определения без проведения дополнительных экспериментов соответствующих сигналов, содержащих информацию о давлении и расходе в насосе или системе, исходя из считанных значений мощности и скорости двигателя, на основе принятых сигналов в соответствии с указанным в настоящей заявке.
Объем предлагаемого изобретения не ограничивается каким-либо конкретным вариантом осуществления с использованием технологии, которая известна на сегодняшний день или будет разработана впоследствии в будущем. Объем настоящего изобретения также включает осуществление функционального назначения процессоров 10а, выполненных в виде автономного процессора или процессорного модуля, отдельного процессора или процессорных модулей, или в виде какой-либо их комбинации.
Устройство 10 также может содержать, к примеру, другие микросхемы или компоненты 10b процессора обработки сигналов, включая запоминающее устройство с произвольной выборкой или запоминающее устройство (RAM) и/или постоянное запоминающее устройство (ROM), устройства ввода/вывода и контроля, шины передачи данных и адресные шины, соединяющие перечисленные компоненты, и/или по меньшей мере один входной процессор и по меньшей мере один выходной процессор.
Различные признаки, обеспечивающие новизну
Предлагаемое изобретение может содержать или представлять собой по меньшей мере один из следующих вариантов выполнения.
Например, в соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть выполнено или осуществлено в виде средства или способа бессенсорного преобразования по методу наилучшего приближения для определения перепада давления и расхода в насосе, которые, к примеру, могут содержать бессенсорный преобразователь для насоса, выполненный с возможностью определения перепада давления в насосе и расхода в динамической системе с учетом считанных сигналов скорости и мощности двигателя на основе уравнений кривых характеристик насоса и системы и эмпирических уравнений мощности, выраженных в следующем виде:
Р=ƒ(Q, n), P=(Q/Cν)2 и W=w(Cν, n) как, например, схематично проиллюстрировано на Фиг. 3.
В соответствии с некоторыми вариантами выполнения настоящее изобретение может быть осуществлено путем использования одного предпочтительного варианта вышеуказанного средства или способа бессенсорного преобразования по методу наилучшего приближения для перепада давления и расхода в насосе, который, к примеру, может содержать выражение для определения перепада давления в насосе или давления в системе и расхода потока в точке равновесия для перепада давления в насосе и давления в системе, которая находится на пересечении схематично изображенных кривых характеристик насоса и системы.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием уравнений кривых характеристик насоса в вышеуказанном средстве или способе бессенсорного преобразования по методу наилучшего приближения, которые, к примеру, могут содержать модели кривых характеристик насоса, полученные на основе уравнений характеристик насоса с учетом определенной скорости двигателя и расхода в системе. Указанные модели кривых характеристик насоса могут быть аппроксимированы с помощью функции Р=ƒ(Q, n) на основе характеристической кривой жидкостного насоса при максимальной скорости (или кривой характеристик насоса) и закона подобия для насосов. Для обеспечения достаточно хорошего представления с высокой точностью может быть использован метод наилучшего приближения для получения функции для кривой насосных характеристик Р=ƒ(Q, n). Например, для представления кривой насосных характеристик при скорости n может быть использован следующий многочлен наилучшего приближения второго порядка:

Однако, по возможности, для кривой насосных характеристик с несколько усложненной формой может быть использован многочлен более высокого порядка для обеспечения ее лучшего представления. В случае альтернативного использования других методов аппроксимации или интерполяции для построения кривой могут быть использованы некоторые другие формулы. Методы аппроксимации или интерполяции кривой известны из уровня техники, при этом объем правовой охраны предлагаемого изобретения не ограничен каким-либо конкретным типом или видом вышеуказанных подходов, которые известны на настоящий момент или будут разработаны в будущем.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием в вышеуказанном средстве или методе бессенсорного преобразования по методу наилучшего приближения уравнения кривой характеристик эквивалентной жидкостной системы, которое, к примеру, может содержать уравнение расхода вида  или ряд альтернативных выражений или приближений для представления кривой характеристик системы.
или ряд альтернативных выражений или приближений для представления кривой характеристик системы.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием в вышеуказанном средстве или методе бессенсорного преобразования по методу наилучшего приближения точки равновесия давления при установившемся режиме, которая находится на пересечении функций кривых насоса и системы, как показано на Фиг. 3. Значения давления в системе или перепада давления и расхода в насосе могут быть определены в точке равновесия давлений на основе пары считанных значений для двигателя, например, скорости и мощности, в виде выходных значений, полученных способом бессенсорного преобразования. Например, для аппроксимации кривой второго порядка для насосных характеристик по методу наилучшего приближения вышеуказанные уравнения (1) и (2), представленные в следующем виде:
и

могут быть применены в качестве формул для определения расхода и давления в системе для использования в бессенсорном преобразователе при условии, что известна пара значений, а именно значения скорости и мощности двигателя, соответственно. Однако, при необходимости, уравнения для преобразования значений давления и расхода в системе могут быть выражены в другом виде в соответствии с подходом с использованием точки равновесия давления при установившемся режиме, при этом могут быть использованы аппроксимирующие или интерполирующие функции более высокого порядка или некоторые другие виды функций.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием в вышеуказанном средстве или способе бессенсорного преобразования по методу наилучшего приближения эмпирической функции мощности для определения коэффициента характеристик эквивалентной системы на основе мощности и скорости двигателя, причем указанная эмпирическая функция может представлять собой, к примеру, эмпирическую функцию мощности вида w(Cν, n) с учетом значений скорости двигателя и расхода в системе. Указанные модели кривой мощности могут быть приблизительно выражены с помощью функции w(Cν, n) на основе кривой мощности при максимальной скорости и в полном соответствии с кривой характеристик насоса и законом подобия. Аналогичным образом, для достаточно хорошего представления функции кривой мощности w(Cν, n) с обеспечением высокой точности может быть применен метод наилучшего приближения. Например, многочлен наилучшего приближения второго порядка согласно следующему Уравнению (4)

может быть использован для представления функции кривой мощности с учетом скорости n двигателя и нормированного коэффициента  характеристик эквивалентной системы, значения которых получены на основе соответствующей кривой мощности, соответствующей кривой характеристик насоса при максимальной скорости, которая схематично проиллюстрирована на Фиг. 4. При необходимости для обеспечения лучшего представления функций кривой мощности может быть использован многочлен более высокого порядка или другие виды выражений.
характеристик эквивалентной системы, значения которых получены на основе соответствующей кривой мощности, соответствующей кривой характеристик насоса при максимальной скорости, которая схематично проиллюстрирована на Фиг. 4. При необходимости для обеспечения лучшего представления функций кривой мощности может быть использован многочлен более высокого порядка или другие виды выражений.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием одного предпочтительного варианта эмпирической функции мощности в средстве бессенсорного преобразования по методу наилучшего приближения для определения перепада давления и расхода в насосе, которая, к примеру, может содержать многочлен наилучшего приближения по Уравнению (4):

а также преобразованный закон подобия мощностей ƒ*(n), выраженный в виде многочлена третьего порядка в соответствии с Уравнением (6):

Преобразованный закон подобия мощностей ƒ*(n) получен путем аппроксимации набора значений мощности, нормированных с учетом соответствующего максимального значения скорости из набора известных значений скорости при определенном состоянии системы, и может быть использован для компенсации изменения значений мощности в области малых значений скорости, соответствующих отключенному состоянию системы.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием в средстве или способе бессенсорного преобразования по методу наилучшего приближения преобразования коэффициента характеристик системы, которое, к примеру, может содержать все виды выражений, а именно решение в виде формулы или решение с использованием некоторых дискретных численных методов. Например, Уравнение (3) следующего вида:
может быть выражено в виде формулы, выведенной для получения выражения для определения коэффициента характеристик эквивалентной системы из уравнения (4) для эмпирической функции мощности.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено путем использования средства или способа бессенсорного преобразования по методу наилучшего приближения в жидкостной насосной системе, которая, к примеру, может представлять собой любую жидкостную насосную систему с закрытым или открытым контуром, в том числе первичную насосную систему, вторичную насосную систему, систему циркуляции воды и систему повышения давления. Указанные системы могут состоять как из одного, так и из нескольких участков.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использования данных согласно кривым насосных характеристик и кривым мощности при максимальной скорости двигателя и представлять собой средство или способ бессенсорного преобразования по методу наилучшего приближения, в которых, к примеру, могут быть использованы данные согласно кривым насосных характеристик и кривым мощности, предоставленным производителями насосов, или некоторые значения характеристик насоса, измеренные при максимальной скорости двигателя во время эксплуатации. Данные согласно кривой мощности двигателя могут быть также заменены любыми возможными электрическими или механическими сигналами, считываемыми на двигателе, например, такими как значения тока или крутящего момента двигателя и т.п.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием в средстве или способе бессенсорного преобразования по методу наилучшего приближения жидкостных сигналов, которые, к примеру, могут содержать, значения перепада давления в насосе, значения давления в системе или на каком-либо ее участке, значения расхода потока в системе или на ее участке и т.п.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием технологий проводной связи и передачи управляющих сигналов, которые, к примеру, могут содержать все стандартные регистрирующие и передающие средства, используемые в настоящее время. Предпочтительным, оптимальным и выгодным является использование технологий передачи сигналов посредством беспроводных датчиков.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием вышеуказанных насосов для жидкостных насосных систем, которые, к примеру, могут представлять собой один насос, циркуляционный насос, группу параллельно соединенных насосов или циркуляционных насосов, группу последовательно соединенных насосов или циркуляционных насосов или их комбинации.
В соответствии с некоторыми вариантами выполнения предлагаемое изобретение может быть осуществлено с использованием систем регулирования расхода, которые, к примеру, могут содержать клапаны с ручным или автоматическим управлением, циркулярные насосы с ручным или автоматическим управлением или их комбинации.
Вышеуказанные варианты осуществления приведены в качестве примеров, при этом объем правовой охраны предлагаемого изобретения включает также другие типы или виды его осуществления, соответствующие описанным в данной заявке и не изменяющие сущность предлагаемого изобретения.
Объем правовой охраны изобретения
Следует понимать, что, если не указано иное, любой признак, характеристика, альтернативный вариант или модификация из указанных в отношении конкретного варианта выполнения, описанного в данном документе, также может быть применен, использован или включен в любой другой описанный вариант выполнения. Кроме этого, приведенные в данной заявке чертежи выполнены не в масштабе.
Несмотря на то, что предлагаемое изобретение описано на примере центробежного насоса, объем правовой охраны предлагаемого изобретения включает возможность его осуществления применительно к другим типам или видам насосов, которые известны в настоящее время или будут разработаны в будущем.
Несмотря на то, что предлагаемое изобретение описано и проиллюстрировано на примере иллюстративных вариантов выполнения, в этих вариантах могут быть выполнены вышеуказанные, а также другие дополнения и исключения в рамках сущности и объема правовой охраны предлагаемого изобретения.





Устройство для измерения расхода текучей среды (варианты)
Система и устройство адаптивного бездатчикового управления расходом насоса для энергосберегающих насосных применений
Способ и устройство для управления насосом с использованием переменной характеристики эквивалентной системы, известной как кривая адаптивного управления
Способ динамического линейного управления и устройство для управления насосом с переменной скоростью
Устройство с множеством насосов изменяемой скорости для обеспечения экономии энергии посредством расчета и компенсации потерь на трение, используя показатель скорости
Система и устройство адаптивного бездатчикового управления расходом насоса для энергосберегающих насосных применений
Адаптивное бессенсорное управление насосом с устройством самокалибровки для жидкостной насосной системы
Устройство для трехмерного бессенсорного преобразования дифференциального давления и расхода насоса
Устройство и способ для управления насосом
Преобразователь расхода дискретного клапана
Усовершенствованная система графического бессенсорного энергосберегающего управления насосами в режиме реального времени
Прямой численный аффинный бессенсорный преобразователь для насосов

