Результат интеллектуальной деятельности: СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ
Вид РИД
Изобретение
Изобретение относится к радиотехнике, а именно к радиолокации и может быть использовано на железных дорогах (ж/д) для определения параметров движения локомотива таких, как мгновенную скорость, пройденный путь от начала движения, количество пройденных шпал и координаты нахождения локомотива в данный момент времени, и контроля дорожной обстановки перед локомотивом на расстоянии до одного-двух километров, особенно при возможности возникновения внештатных ситуаций.
Общей проблемой на пути следования ж/д состава является своевременное обнаружение возникших препятствий, помех, могущих привести к предпосылке аварийной ситуации. Особенно часто такими препятствиями является различная транспортная техника, которая имеет свойство заглохнуть именно на переезде, чаще всего на нерегулируемом. Конкретный свежий пример. Регулируемый ж/д переезд около г. Владимир, число и время: 06 октября 2017 г., около 3-х часов ночи московского времени. Пассажирский скоростной электропоезд Москва - Н. Новгород столкнулся на этом переезде с автобусом. Причина: автобус нарушил ПДЦ, выехал на ж/д переезд на запрещающий красный светофор и заглох, завестись снова не смог. Машинист поезда в свете прожектора увидел препятствие только за 300-400 м., экстренно затормозил, но тормозного пути не хватило, авария; 17 человек погибло, много раненных.
Также могут быть препятствием отцепившийся последний вагон впереди прошедшего поезда, люди на пути, дикие и домашние животные, камнепады на горных ж/д, упавшие деревья и пр.
Почти единственным способом обнаружить возникшие препятствия на ж/д пути является оптический, то есть взгляд машиниста. Здесь вступает в силу человеческий фактор: усталость, рассеянность, отвлечение, особенности зрения, также правильное определение расстояния до возникшего препятствия. В дополнении к этому крутые повороты ж/д колеи, снижающие прямую видимость от кабины локомотива до этого препятствия, а также ограниченная видимость: ночь, дымка, туман, снег, сильный дождь.
Таким образом назрела необходимость исключить до минимума эти факторы, мешающие своевременному обнаружению возникших препятствий и поручить какой-либо системе объективное и независимое наблюдение обстановки на ж/д пути с сигнализацией обнаружения препятствий, вплоть для принятия решения об экстренном торможении. (в некоторых случаях, особенно на ж/д переездах).
В настоящее время из известных источников авторам о наличии такой системы на ж/д транспорте неизвестно.
Известны попытки создания такой системы для автомобилей, в основном в ближнем ИК - диапазоне. Также известна попытка создать систему обнаружения препятствий на основе алгоритма формирования критериальной функции с автофокусировкой, см. Будаи Б.Т. статья «Обеспечение безопасности вождения транспортных средств в условиях пестрых фонов», см. труды 26-ой международной Крымской конференции, Том 10, М, Минск, Севастополь, 2016 г., стр. 2367.
Эти системы показывают визуальную обстановку, а в условиях плохой видимости и выбранного частотного диапазона это, естественно, снижает эффективность обнаружения препятствий.
Известны автодинные радиолокаторы малого радиуса действия с частотной модуляцией, которые нашли широкое применение на ж/д транспорте в качестве измерителей параметров движения вагонов на сортировочных горках, локомотивов относительно полотна дороги, обнаружителей занятости стрелочных переводов и ж/д переездов, датчиков предупреждения столкновений и многое другое, см. Носков В.Я. и др. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазона и их применение», ч. 9 «Радиолокационное применение автодинов «Успехи современной радиоэлектроники», 2016, №3, стр. 32-80.
Недостаток: малый радиус действия до 100-200 м.
Также известен патент РФ №2378654 от 10.01.2010 г. «Локомотивная система определения скорости движения и пройденного пути», которая содержит три приемоизлучающих устройства, каждое из которых включает блок СВЧ - излучателя с передающей антенной и приемный блок отраженного СВЧ - излучения с приемной антенной и усилителем и программируемый микропроцессор с двумя блоками корреляционно-экстремальной обработки. Все приемоизлучающие устройства расположены последовательно по продольной симметрии рельса и отраженные сигналы от подстилающего балласта, воспринимаются и анализируются по специальному обеспечению.
Недостаток: очень сложное схемное решение за счет применения корреляционной обработки, а также нестабильная работа в экстремальных условиях эксплуатации.
Эта система вообще не применима в высокоскоростных ж/д магистралях, в которых не используются шпалы, а есть только прочное подстилающее основание на всем пути, т.е. нет балласта в обычном смысле этого слова, т.е. нет реперов для отчетов.
Наиболее близким техническим решением является система сравнения эталонного и реального профиля пути впереди идущего локомотива с помощью РЛС, сканирующей по углу места и азимута в пределах 15-20° («профиль горизонта») полученные данные сравниваются с эталонными профилями, хранящимися в памяти РЛС для различных точек профиля горизонта, так называемой цифровой дорожной карты. См. Carlson G «Horizon profile checkpoint for low-altitude aircraft» - IEEE Transactions on Aerospace and Electronic Systems, 1976, v. AES-12. №2.
Недостаток:
- только радиолокационный режим, нет визуализации впередилежащего пути и его ближайших окрестностей диаграммы направленности;
- применение механического сканирования антенны создает ряд неудобств в эксплуатации и удорожает стоимость системы;
- применение фазированной антенной решетки с электронным сканированием приводит к значительному усложнению РЛС, а, значит, и удовлетворению габаритно-массовых характеристик.
Технической задачей изобретения является повышение точности и достоверности измерения параметров движения и создание системы, которая не нуждается ни в установке каких-либо дополнительных реперных элементов вдоль рельсовой колеи, ни в приеме сигналов спутниковых навигационных систем для определения координат локомотива на ж/д пути, а также, нужен как говорят на флоте, «впередсмотрящий», т.е. важно видеть реальную обстановку впереди пути движения локомотива (от нескольких метров до 1,5-2,0 км) как бы вид из кабины машиниста, только с высоким разрешением по дальности, несмотря на любые плохие погодные условия: снег, дождь, туман и пр.
Технический результат достигается за счет применения:
- радиолокации малой дальности;
- четырех каналов измерения по два последовательных на каждый монорельс;
- широкополосных зондирующих сигналов с высоким разрешением по дальности;
- оптимальной обработки отраженных сигналов.
Для решения поставленной задачи предлагается способ путевой навигации и обзора передней полусферы локомотива по геометрии железнодорожного пути, основанный на радиолокации малой дальности и использовании дорожной карты, отличающийся тем, что содержит две радиолокационные системы - РЛС: первая сканирует подстилающую поверхность пути под днищем локомотива, определяя по выбранным реперным точкам текущие координаты локомотива на пути следования и мгновенную скорость, вторая сканирует переднюю полусферу по пути следования локомотива, определяя радиолокационные ориентиры непосредственно на рельсовом пути и по обе стороны от него, полученные результаты сканирования передней полусферы привязываются к текущим координатам локомотива, определяемые первой системой, непрерывно сравниваются с дорожной картой и оценивается их соответствие и, в случае разногласия, выдается сигнал опасности, причем вторая РЛС одновременно строит визуальное 3D изображение передней полусферы в пределах радиолокационной прямой видимости в реальном масштабе времени, независящее от погодных условий.
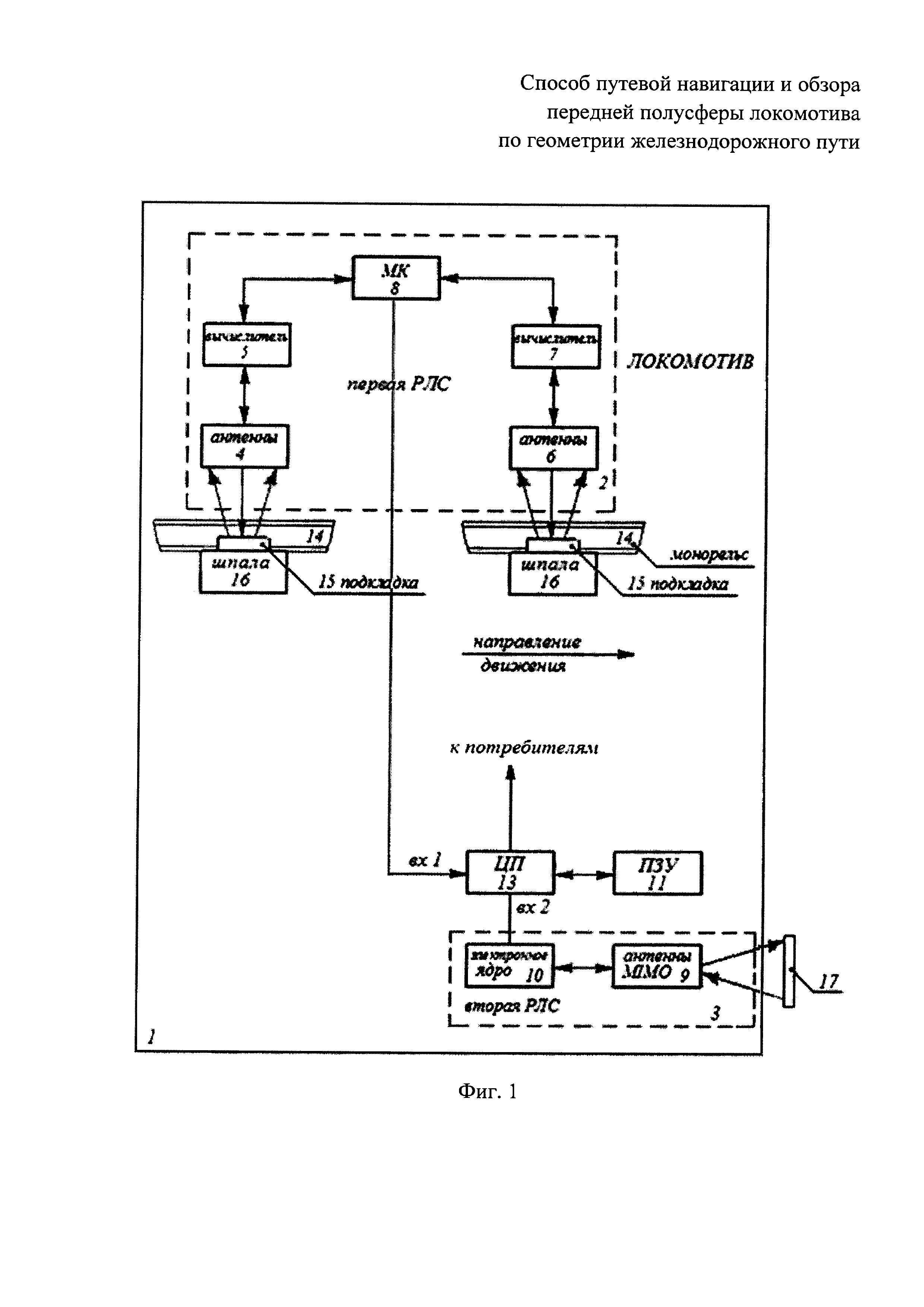
На фиг. 1 показана общая структурная электрическая схема реализации данного способа, на которой изображено:
1 - схема в целом;
2 - первая навигационная РЛС;
3 - вторая РЛС - обзора передней полусферы;
4 и 6 - блоки приемо-передающих антенн первой РЛС;
5 и 7 - вычислители первой РЛС;
8 - микроконтроллер первой РЛС;
9 - блок антенн MIMO обзора передней полусферы локомотива второй РЛС;
10 - электронное ядро второй РЛС (АЛУ);
11 - цифровая дорожная карта;
13 - центральный процессор (ЦП);
14-монорельс;
15 - подкладка для крепления шпалы к монорельсу;
16 - шпала;
17 - отражающие предметы на ж/д колее и по обе стороны от него впереди локомотива.
Схема на фиг. 1 имеет следующие соединения.
Выходы блоков приемо-передающих антенн 4 и 6 связаны с вычислителями 5 и 7 первой РЛС, а выход блока приемо-передающих антенн 9 второй РЛС связан с ее электронным ядром 10, выходы обоих вычислителей 5 и 7 первой РЛС соединены с сигнальными входами микроконтроллера 8, выходы обеих РЛС соединены с первым и вторым входами ЦП 13 соответственно, с третьим входом которого соединена цифровая дорожная карта 11.
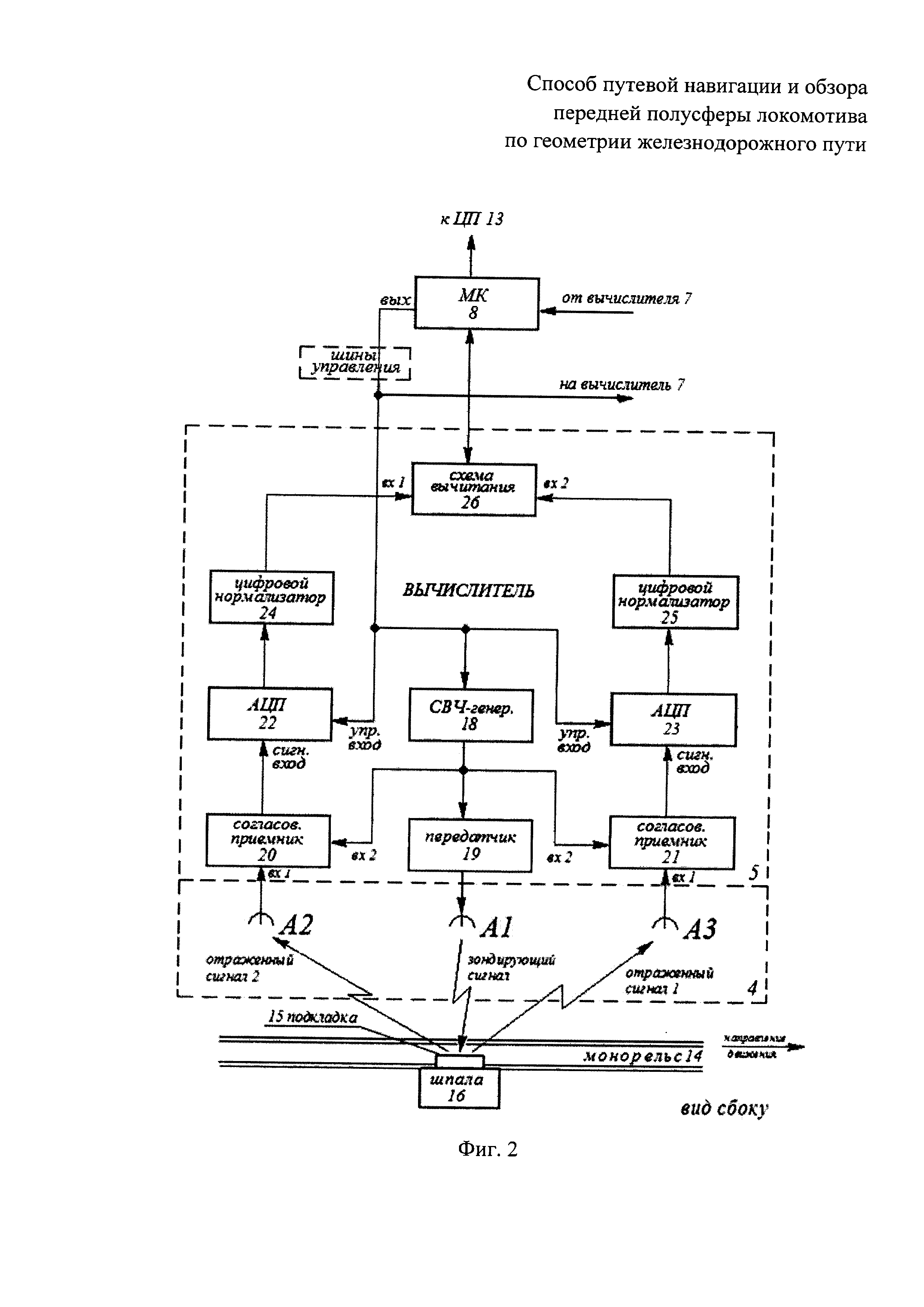
На фиг. 2 показана структурно-электрическая схема одного вычислителя 5 (второй 7 полностью идентичен), на которой изображено:
18 - СВЧ - генератор;
19 - передатчик;
20, 21 - согласованные приемники;
22 и 23 - АЦП;
24 и 25 - цифровые нормалиаторы;
26 - цифровая схема вычитания;
А1 - передающая антенна;
А2 и A3 - приемные антенны.
Схема имеет следующие соединения:
Выход СВЧ-генератора 18 через передатчик 19 соединен с передающей антенной А1 блока приемо-передающих антенн 4, также выход СВЧ-генератора 18 соединен со вторым входом согласованных приемников 20 и 21; выходы которых последовательно через АЦП 22 и 23 и через цифровые нормализаторы 24 и 25, соответственно, соединены с первым и вторым входами схемы вычитания 26, выход которой соединен с сигнальным входом МК 8; шины управления МК 8 соединены с управляющими входами АЦП 22 и 23, СВЧ-генератора 18.
Первая РЛС работает следующим образом. По управляющему сигналу с выхода МК 8 генератор СВЧ 18 начинает генерировать последовательность сигналов сверхвысокой частоты, которые через передатчик 19 возбуждают в антенне А1 электромагнитные волны, которые частично отражаются от подстилающей поверхности (шпалы, балласта), а главным образом от подкладок 15 с болтами и гайками на них, крепящих монорельс 14 к железобетонным шпалам 16. Отраженные от подкладки 15 сигналы принимаются антеннами А2 и A3 и через согласованные приемники 20 и 21, и через АЦП 22 и 23 нормируются на схемах 24 и 26, где и выделяются их НЧ-составляющие. Затем выделенные НЧ сигналы подаются на схему вычитания 26, при этом фиксируются моменты времени, когда сигналы со схемы вычитания проходят через нулевое значение. И вычисляется промежуток времени ΔT между двумя отсчетами прохождения нуля.
Фиксация моментов времени прохода через подкладку антеннами 4 и 6 (вычислителями 5 и 7) происходит в МК 8, где вычисляется промежуток времени ΔT, а по нему и базе линейная скорость локомотива, пройденный путь и число пройденных шпал и все вычисленные параметры передаются в ЦП 13 для дальнейшей обработки.
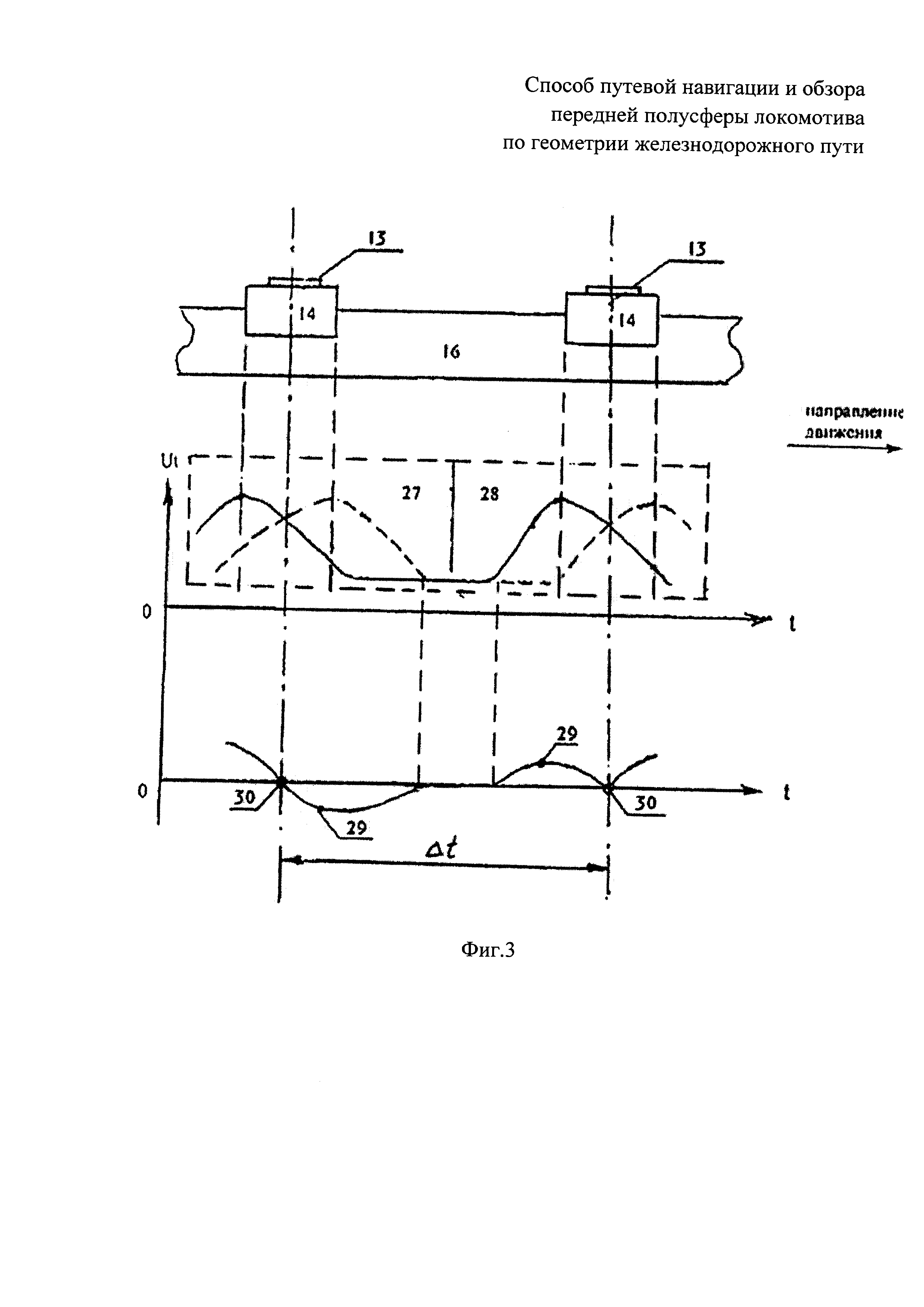
На фиг. 3 показаны кривые напряжений на входах и выходах схемы вычитания 26, на которых изображено:
27 - кривые напряжений на выходе второго вычислителя 7 (вход 2 схемы вычитания 26);
28 - кривые напряжений на выходе первого вычислителя 5 (вход 1 схемы вычитания 26);
29 - кривая напряжения на выходе схемы вычитания 26;
30 - точки перехода через ноль разностного сигнала обоих вычислителей;
ΔT - время прохода середины подкладки шпалы между вторым и первым вычислителями (между соседними точками перехода через ноль).
Линейная скорость локомотива определяется по простейшей формуле S=V*t, а зная расстояние между антеннами 4 и 6 (например, 3 метра) и время межу моментами фиксации (перехода через ноль каждого регистратора), то скорость  где S - фиксированное расстояние между антеннами 4 и 6, ΔT - время межу переходами через ноль антенн A3 и А2, именно в этой послеовательности.
где S - фиксированное расстояние между антеннами 4 и 6, ΔT - время межу переходами через ноль антенн A3 и А2, именно в этой послеовательности.
Для высокоскоростных железных дорог (300-500 км/час) можно взять промежуток времени ΔT за большее число нулевых отметок, например, 5, тогда 
Фиксируя каждую шпалу, по дорожной карте определяем местоположение локомотива на местности, а интегрируя значения скорости, определяем пройденный путь.
Таким образом, выполнение операций согласно заявленному способу позволяет обеспечить измерение линейной скорости локомотива и пройденного пути с высокой функциональной надежностью.
Устройство по данному способу устанавливается под днищем локомотива на высоте 0,5-1,0 м. над уровнем головки рельсов. Расстояние между антеннами 4 и 6 - база (оптимальное) можно взять равным трем метрам. Зная количество пройденных шпал, определяется с помощью дорожной карты место нахождения локомотива и значимость действия машиниста: набрать скорость (сбросить скорость) до определенной величины, торможение до остановки и пр. При перемещении локомотива (устройства) над железнодорожным полотном интенсивность отраженного сигнала имеет периодический характер, обусловленный периодичностью расположения шпал в рельсошпальной решетке. Характер изменения отраженного и принятого сигнала при перемещении локомотива, а, следовательно, и устройства (а именно наличие нуля принятого сигнала при нахождении над серединой очередной подкладки) позволяет определить количество пройденных шпал и тем самым положение локомотива на рельсовой колее, также при помощи сравнения с дорожной картой.
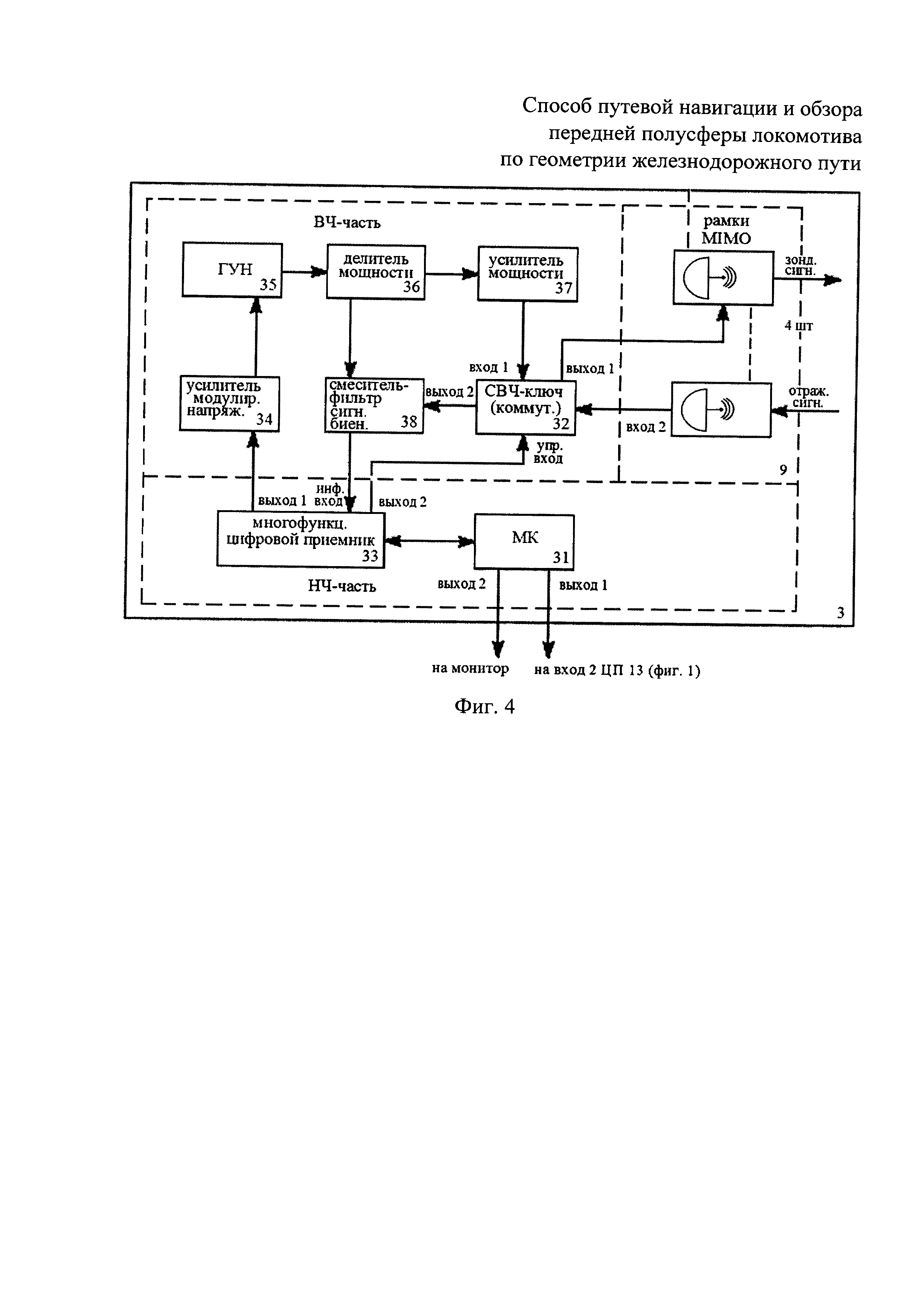
На фиг. 4 показана упрощенная структурная электрическая схема второй РЛС 3 (обора передней полусферы), на которой изображено:
31 - микроконтроллер МК;
32 - СВЧ-ключ (коммутатор);
33 - многофункциональный приемник;
34 - усилитель-модулятор;
35 - генератор, управляемый напряжением (ГУН);
36 - делитель мощности;
37 - усилитель-фильтр сигнала биений;
38 - усилитель-фильтр сигналов биения.
Схема второй РЛС имеет следующие соединения:
38 - схема визуализации (3D изображение - монитор).
Схема имеет следующие соединения: МК 31 двунаправленной шиной соединен с многофункциональным приемником 33, второй выход которого соединен с управляющим входом СВЧ-ключа 32, и первый выход через усилитель модулятор 34, ГУН 35 и делитель мощности соединен с входом усилителя мощности и через смеситель-фильтр сигнала биений 38 - с информационным входом многофункционального цифрового приемника 33; выход усилителя мощности 37 соединен с первым входом СВЧ-ключа, со вторым входом которого соединен выход приемных линеек рамок MIMO 9, первый выход СВЧ-ключа соединен с передающими линейками рамок MIMO 9, а второй выход с другим входом смесителя-фильтра сигнала биений 38; первый выход МК 31 является выходом второй РЛС и соединен со вторым входом ЦП 13 (фиг. 1), а второй выход соединен с блоком визуализации 38 - монитором.
В основу построения схемы положены следующие принципы работы радиолокатора, предназначенного для построения трехмерных радиочастотных изображений объекта зондирования:
- зондирующий сигнал с линейной частотной модуляцией (ЛЧМ);
- корреляционно-фильтровая обработка отраженного сигнала, внутренняя когерентность системы;
- радиоголографический синтез изображения (метод синтезированной апертуры);
- неподвижная многоканальная антенная система MIMO.
Цель их применения состоит в достижении:
- высокой разрешающей способности по дальности за счет применения сверхширокополосного зондирующего сигнала;
- высокого углового разрешения за счет синтеза апертуры при использовании малогабаритных антенн;
- быстрого процесса сканирования.
Вторая РЛС работает следующим образом:
Под управлением микроконтроллера МК 31 и синхронно с запуском АЦП формирует зондирующий ЛЧМ-сигнал в диапазоне частот от 2 ГГц до 4 ГГц.
Полосовой фильтр-усилитель 37 отфильтровывает полезные спектральные составляющие сигнала биений, соответствующие рабочим дальностям от 5 м до 1-2 км, а также предотвращает наложение спектров при последующем аналого-цифровом преобразовании.
Многофункциональный цифровой приемник 33 предназначен для оцифровки сигнала биений, поступающего с выхода аналогового фильтра-усилителя сигналов биений 37, формирования пакетов данных и передачу их в блок обработки (АЛУ). Кроме того цифровой приемник управляет работой СВЧ-ключа 32 синхронно с работой АЦП.
По команде МК 31 начать преобразование на каждый отчет модулирующего напряжения на выходе ЦАП формируется отчет АЦП. АЦП имеет 18 разрядов и производительность до 1 Мегавыборки в секунду. Работой ЦАП и АЦП управляет микроконтроллер МК 31, который осуществляет синхронизацию работы АЦП и ЦАП, считывает оцифрованные данные с выхода АЦП и передает их по стандартному интерфейсу RS232 (USB) в блок обработки. Схема имеет два независимых канала АЦП, благодаря чему возможна квадратурная обработка сигнала. ЦАП служит для формирования скорректированного пилообразного напряжения для ГУН передатчика 35. Память необходима для хранения отсчетов сигнала во время зондирования.
Вторая РЛС многофункциональна. Она может работать как в высокочастотном варианте локатора, формируя моделирующее напряжение посредством ЦАП для ГУН, так и в низкочастотном (для получения 3D изображения) до 400 МГц благодаря наличию DDS (прямого цифрового синтеза).
Микроконтроллер МК 31 имеет два порта дискретного ввода-вывода. Они использованы для управления коммутацией антенн (высокочастотный вариант) или для
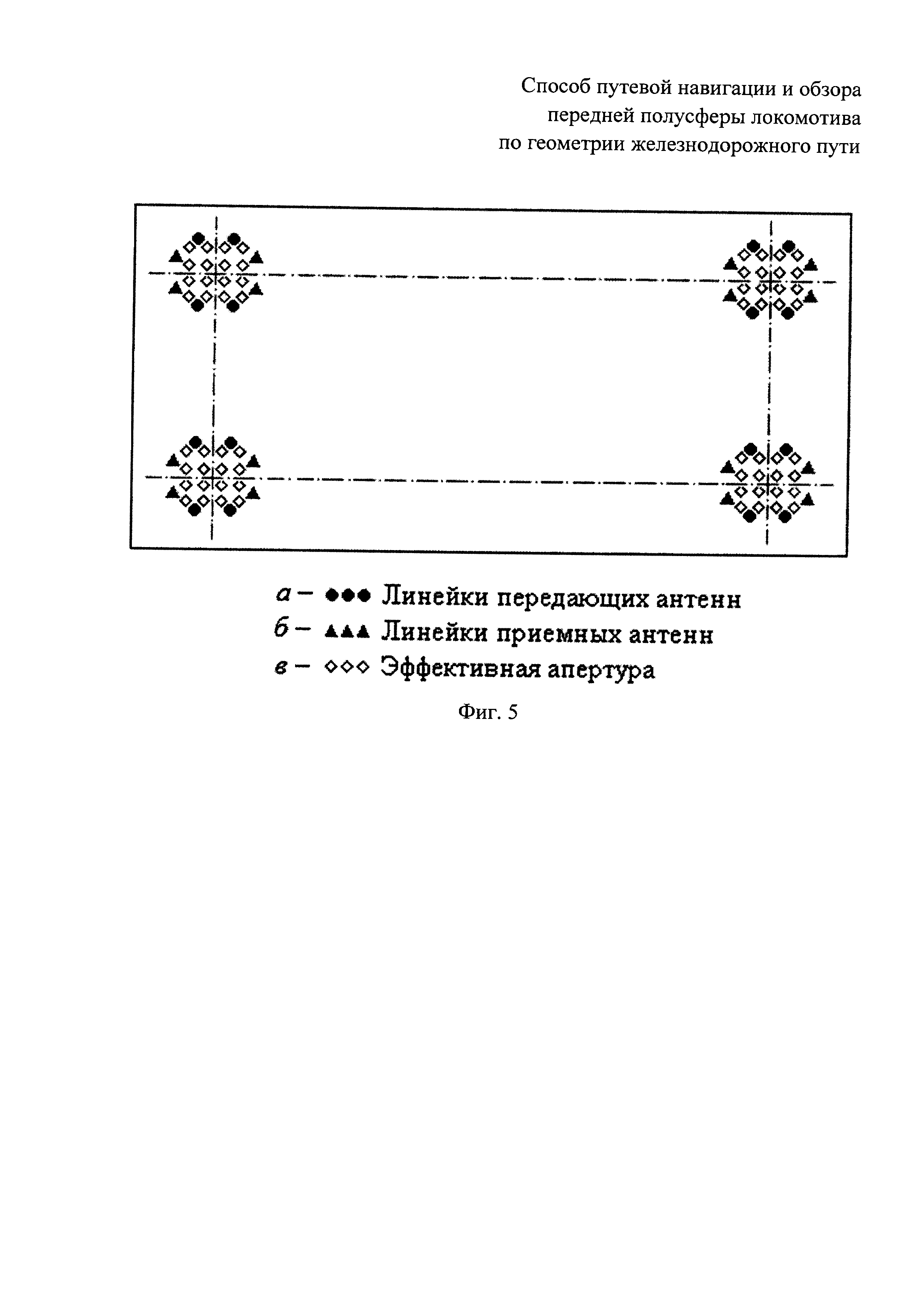
На фиг. 5 приведена общая структурная схема антенных решеток второй РЛС, состоящая из 4-х антенных рамок каждая из которых - это две передающие линейки и еще две приемные линейки, на ней изображено:
а - линейки передающих антенн;
б - линейки приемных антенн;
в - эффективная апертура.
В реальности число ячеек определяется техническими требованиями к системе: разрешающая способность по дальности, требуемая диаграмма направленности и т.д.
Рамки MIMO в количестве четырех штук по 4 приемных и 4 передающих излучателей в каждой крепятся по углам ветрового стекла локомотива, направление максимального излучения каждого отдельного излучателя в рамке и всех четырех рамок в целом оказывается таким, что парциальные диаграммы направленности складываются в нужном направлении. Эта система из 4-х малогабаритных рамок применена на второй РЛС (обзора передней полусферы).
В первой РЛС (навигационной) передающие антенны и принимающие могут быть выполнены на основе элементарных излучателей или в виде спиральных антенн.
В основу работы системы обзора передней полусферы положен принцип широкополосного радиолокатора с синтезированной апертурой; зондирующий сигнал с линейной частотной модуляцией; корреляционно-фильтровая обработка отраженного сигнала с внутренней когерентностью. Это позволяет получить высокую разрешающую способность, высокое угловое разрешение за счет синтеза апертуры при использовании малогабаритных антенн в составе MIMO-линеек или матриц (MIMO - это Multiple Input - Multiple Output, множественный вход - множественный выход).
Систем из двух РЛС работает следующим образом. При движении локомотива первой РЛС производится непрерывное измерение его местонахождения и вычисляется значение мгновенной скорости и эти данные передаются в центральный процессор. Одновременно вторая РЛС сканирует переднюю полусферу ж/д пути по движению локомотива и определяет все радиолокационные отражающие ориентиры, передавая их координаты также в ЦП. Этими ориентирами может быть будки обходчиков, трансформаторные подстанции, мачты сотовой связи, ж/д переезды и т.д. ЦП сравнивает эти полученные ориентиры с ориентирами пути занесенными в цифровую дорожную карту. При совпадении этих ориентиров между собой считается, что все в порядке. Если же есть отличия, особенно на ж/д переездах: застрявший автотранспорт, свалившийся груз и пр., то это уже внештатная ситуация и ЦП выдает сигнал машинисту и по радиоканалу в диспетчерский пункт и производится экстренное торможение по команде машиниста или автоматически.
Также система может обнаружить и выдать сигналы о наличии на ж/д пути людей (группу), диких и домашних животных (стадо), а также только приближающего к ж/д переезду автотранспорта и многое другое, включая встречный поезд по одному и тому же пути (сверхаварийная ситуация, бывает и такое).
Совместная работа этих двух РЛС позволяет значительно увеличить контроль дорожной обстановки на пути движения локомотива и повысить безопасность движения.
Система особенно эффективна при обнаружении внештатных ситуаций, например, при контроле нерегулируемых переездов, на которых приходят большинство столкновений ж/д составов в автомобильными видами транспорта, включая тракторные, сюда же входят различные с/х самоходные машины, также спецтехника в виде экскаваторов, погрузчиков и прочих, так как водители вышеперечисленных машин не очень дружат с правилами дорожного движения, а также не всегда соблюдают «сухой закон», отсюда и возникают внештатные ситуации.
Применение данного способа позволяет выявить возникшие препятствия на ж/д переезде за 1,5-2,0 км., что позволит, безусловно, избежать столкновения, так как, зная расстояние до переезда и скорость локомотива, ЦП легко рассчитает вид торможения, вплоть до экстренного.
Также следует заметить, что определение расстояния до переезда не зависит от погодных условий, как-то дождь, снег, туман и пр.
На дорожной карте делаются особые отметки о ж/д переездах, а ЦП при приближении локомотива к ним на расстоянии 1,5-2,0 км выдает звуковой и световой сигнал машинисту, чтобы он был особенно внимателен.
Также ЦП по дорожной карте сравнивает нанесенные маркерные точки ж/д пути с принятыми второй РЛС отраженными от них отметками и корректирует (в случае необходимости) местонахождение локомотива на ж/д пути.
Следует заметить, что обор передней полусферы без привязки к местоположению локомотива в любой данный момент времени, а значит соответствие полученного радиолокационного портрета впередилежащей дорожной обстановке, имеет половинчатое решение, т.к. может быть пропуск препятствия или наоборот ложный сигнал о его наличии.
Следовательно, система должна иметь две составляющие: РЛС путевой навигации и РЛС обора передней полусферы жестко связанные между собой по времени и по месту положения локомотива на ж/д пути.
Вторая РЛС может одновременно работать в радиолокационном режиме и совместно с первой РЛС образует законченную систему, и дополнительно - в режиме визуализации местности, помогая машинисту в путевой ориентации особенно в плохую погоду.
Способ путевой навигации и измерения скорости локомотива по геометрии железнодорожного пути
Нелинейная радиолокационная система для автоматического управления тормозами локомотива
Комплекс информационного обеспечения системы автоматического управления торможением поезда
Способ контроля плотности тормозной сети поезда
Ультразвуковой расходомер
Датчик угла поворота
Способ передачи информационных сообщений в микропроцессорных системах управления и диагностики
Способ измерения скорости ветра на основе эффекта доплера
Способ измерения скорости ветра
Акустическая система определения параметров перфорирования при вторичном вскрытии нефтегазовых буровых скважин
Устройство для измерения раствора валков машин непрерывного литья заготовок
Трехмерная система голографического радиовидения для досмотра
Способ путевой навигации и измерения скорости локомотива по геометрии железнодорожного пути
Нелинейная радиолокационная система для автоматического управления тормозами локомотива
Конструкция многофункциональной радиолокационной досмотровой системы
Комплекс информационного обеспечения системы автоматического управления торможением поезда

