Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ФОТОСЪЕМКОЙ БЕСПИЛОТНОГО ВОЗДУШНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Перекрестная ссылка на родственную заявку
[0001] Данная заявка основана на и притязает на приоритет заявки на патент (Китай) порядковый номер 201510531707.X, поданной в Государственное ведомство по интеллектуальной собственности Народной Республики Китай 26 августа 2015 года, содержимое которой полностью включено в данный документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее раскрытие сущности относится к области техники беспилотных воздушных транспортных средств, а более конкретно, к способу и устройству для управления фотосъемкой беспилотного воздушного транспортного средства и к электронному устройству.
Уровень техники
[0003] Беспилотный воздушное транспортное средство широко используется в различных сценариях, таких как аэрофотосъемка, спасение и т.п. В предшествующем уровне техники, когда беспилотный воздушное транспортное средство используется для того, чтобы выполнять аэрофотосъемку, пользователь должен управлять беспилотным воздушным транспортным средством таким образом, чтобы лететь и фотографировать вручную, что требует от пользователя не только иметь высокий уровень управления полетом, но также и фокусироваться на управлении полетом беспилотного воздушного транспортного средства, так что пользователь не может делать других дел отдельно, в силу этого сильно ограничивая сценарии применения.
Раскрытие изобретения
[0004] Настоящее раскрытие сущности предоставляет способ и устройство для управления фотосъемкой беспилотного воздушного транспортного средства и электронное устройство, с тем чтобы разрешать неточности в предшествующем уровне техники.
[0005] Согласно вариантам осуществления первого аспекта настоящего раскрытия сущности, предусмотрен способ для управления фотосъемкой беспилотного воздушного транспортного средства. Способ включает в себя:
- определение того, что предварительно заданное условие начала работы режима удовлетворяется; и
- начало предварительно определенного фотографического режима, соответствующего предварительно заданному условию начала работы режима, так что он применяется в фотографической операции.
[0006] Альтернативно, предварительно заданное условие начала работы режима включает в себя, по меньшей мере, одно из следующего:
- прием предварительно определенной инструкции, отправленной от пользователя;
- обнаружение того, что пользователь находится в предварительно определенной позе; и
- обнаружение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды.
[0007] Альтернативно, способ дополнительно включает в себя:
- получение характеристики движения пользователя; и
- определение того, что предварительно определенная инструкция, отправленная от пользователя, принимается, и того, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика движения находится в соответствии с предварительно определенной характеристикой.
[0008] Альтернативно, получение характеристики движения пользователя включает в себя:
- выполнение получения изображений для пользователя, с тем чтобы получать характеристику движения; или
- установление связи с интеллектуальным устройством, носимым или используемым пользователем, и прием характеристики движения, полученной посредством интеллектуального устройства.
[0009] Альтернативно, характеристика движения включает в себя график траектории, сформированный посредством жеста пользователя.
[0010] Альтернативно, способ дополнительно включает в себя:
- выполнение получения изображений для пользователя, с тем чтобы определять позу пользователя; или
- установление связи с интеллектуальным устройством, носимым или используемым пользователем, прием предварительно определенного параметра физиологической характеристики пользователя, полученного посредством интеллектуального устройства, и определение позы пользователя согласно предварительно определенному параметру физиологической характеристики;
- при этом определяется то, что предварительно заданное условие начала работы режима удовлетворяется, если поза пользователя находится в соответствии с предварительно определенной позой.
[0011] Альтернативно, предварительно определенная поза включает в себя, по меньшей мере, одно из следующего:
- статическая поза или поза при перемещении; и
- поза при размещении на горизонтальной поверхности, поза при размещении на подъеме или поза при размещении на спуске.
[0012] Альтернативно, способ дополнительно включает в себя:
- выполнение получения изображений для окружения, в котором находится беспилотный воздушное транспортное средство или пользователь, и извлечение характеристики окружающей среды, включенной в полученное изображение; и
- определение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды, и того, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика окружающей среды находится в соответствии с предварительно определенной характеристикой.
[0013] Альтернативно, предварительно определенные условия окружающей среды, в которых находится беспилотный воздушное транспортное средство, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и распределение препятствий;
- предварительно определенные условия окружающей среды, в которых находится пользователь, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и число других пользователей, окружающих пользователя.
[0014] Альтернативно, предварительно определенный фотографический режим включает в себя, по меньшей мере, одно из следующего: режим съемки крупным планом, режим перспективы, предварительно определенное расстояние от пользователя, предварительно определенный угол с пользователем и круговой фотографический режим с пользователем в качестве центра.
[0015] Альтернативно, способ дополнительно включает в себя:
- задание и сохранение предварительно определенного фотографического режима согласно принимаемой конфигурационной инструкции пользователя; или
- получение и сохранение предварительно определенного фотографического режима, заданного другими пользователями.
[0016] Альтернативно, способ дополнительно включает в себя:
- прекращение фотосъемки или выполнение отслеживающей фотосъемки, если предварительно заданное условие начала работы режима не удовлетворяется.
[0017] Согласно вариантам осуществления второго аспекта настоящего раскрытия сущности, предусмотрено устройство для управления фотосъемкой беспилотного воздушного транспортного средства. Устройство включает в себя:
- блок определения, сконфигурированный с возможностью определять то, что предварительно заданное условие начала работы режима удовлетворяется; и
- блок начала, сконфигурированный с возможностью начинать предварительно определенный фотографический режим, соответствующий предварительно заданному условию начала работы режима, так что он применяется в фотографической операции.
[0018] Альтернативно, предварительно заданное условие начала работы режима включает в себя, по меньшей мере, одно из следующего:
- прием предварительно определенной инструкции, отправленной от пользователя;
- обнаружение того, что пользователь находится в предварительно определенной позе; и
- обнаружение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды.
[0019] Альтернативно, устройство дополнительно включает в себя:
- блок получения, сконфигурированный с возможностью получать характеристику движения пользователя; и
- первый блок определения, сконфигурированный с возможностью определять то, что предварительно определенная инструкция, отправленная от пользователя, принимается, и то, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика движения находится в соответствии с предварительно определенной характеристикой.
[0020] Альтернативно, блок получения включает в себя:
- подблок получения, сконфигурированный с возможностью выполнять получение изображений для пользователя, с тем чтобы получать характеристику движения; или
- приемный подблок, сконфигурированный с возможностью устанавливать связь с интеллектуальным устройством, носимым или используемым пользователем, и принимать характеристику движения, полученную посредством интеллектуального устройства.
[0021] Альтернативно, характеристика движения включает в себя график траектории, сформированный посредством жеста пользователя.
[0022] Альтернативно, устройство дополнительно включает в себя:
- блок сбора, сконфигурированный с возможностью выполнять получение изображений для пользователя, с тем чтобы определять позу пользователя; или
- приемный блок, сконфигурированный с возможностью устанавливать связь с интеллектуальным устройством, носимым или используемым пользователем, принимать предварительно определенный параметр физиологической характеристики пользователя, полученный посредством интеллектуального устройства, и определять позу пользователя согласно предварительно определенному параметру физиологической характеристики;
- при этом блок определения определяет то, что предварительно заданное условие начала работы режима удовлетворяется, если поза пользователя находится в соответствии с предварительно определенной позой.
[0023] Альтернативно, предварительно определенная поза включает в себя, по меньшей мере, одно из следующего:
- статическая поза или поза при перемещении; и
- поза при размещении на горизонтальной поверхности, поза при размещении на подъеме или поза при размещении на спуске.
[0024] Альтернативно, устройство дополнительно включает в себя:
- блок извлечения, сконфигурированный с возможностью выполнять получение изображений для окружения, в котором находится беспилотный воздушное транспортное средство или пользователь, и извлекать характеристику окружающей среды, включенную в полученное изображение;
- второй блок определения, сконфигурированный с возможностью определять то, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды, и то, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика окружающей среды находится в соответствии с предварительно определенной характеристикой.
[0025] Альтернативно, предварительно определенные условия окружающей среды, в которых находится беспилотный воздушное транспортное средство, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и распределение препятствий;
- предварительно определенные условия окружающей среды, в которых находится пользователь, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и число других пользователей, окружающих пользователя.
[0026] Альтернативно, предварительно определенный фотографический режим включает в себя, по меньшей мере, одно из следующего: режим съемки крупным планом, режим перспективы, предварительно определенное расстояние от пользователя, предварительно определенный угол с пользователем и круговой фотографический режим с пользователем в качестве центра.
[0027] Альтернативно, устройство дополнительно включает в себя:
- блок задания режима, сконфигурированный с возможностью задавать и сохранять предварительно определенный фотографический режим согласно принимаемой конфигурационной инструкции пользователя; или
- блок получения режима, сконфигурированный с возможностью получать и сохранять предварительно определенный фотографический режим, заданный другими пользователями.
[0028] Альтернативно, устройство дополнительно включает в себя:
- блок управления фотосъемкой, сконфигурированный с возможностью прекращать фотосъемку или выполнять отслеживающую фотосъемку, если предварительно заданное условие начала работы режима не удовлетворяется.
[0029] Согласно вариантам осуществления третьего аспекта, электронное устройство включает в себя:
- процессор; и
- запоминающее устройство, сконфигурированное с возможностью сохранять инструкции, выполняемые посредством процессора;
- при этом процессор сконфигурирован с возможностью:
- определять то, что предварительно заданное условие начала работы режима удовлетворяется; и
- начинать предварительно определенный фотографический режим, соответствующий предварительно заданному условию начала работы режима, так что он применяется в фотографической операции.
[0030] Технические решения, предоставленные в настоящем раскрытии сущности, могут включать в себя следующие преимущества.
[0031] Из вышеописанных вариантов осуществления настоящего раскрытия сущности можно видеть, что в настоящем раскрытии сущности, посредством задания соответствующего условия начала работы режима для каждого предварительно определенного фотографического режима, беспилотный воздушное транспортное средство может фактически знать предварительно определенный фотографический режим, который должен начинаться, если одно условие начала работы режима удовлетворяется, в силу этого обеспечивая фактические потребности по фотосъемке пользователя. Между тем, посредством автоматического переключения между предварительно определенными фотографическими режимами, пользователь не должен управлять полетом беспилотного воздушного транспортного средства вручную, так что аэрофотосъемка и другие дела могут быть закончены одновременно, в силу этого упрощая улучшение возможностей работы пользователей.
[0032] Следует понимать, что вышеприведенное общее описание и описание следующей детали являются примерными и пояснительными и не должны истолковываться как ограничивающие настоящее раскрытие сущности.
Краткое описание чертежей
[0033] Прилагаемые чертежи, которые содержатся и составляют часть этого подробного описания, иллюстрируют варианты осуществления в соответствии с настоящим раскрытием сущности и наряду с описанием служат для того, чтобы пояснять принципы настоящего раскрытия сущности.
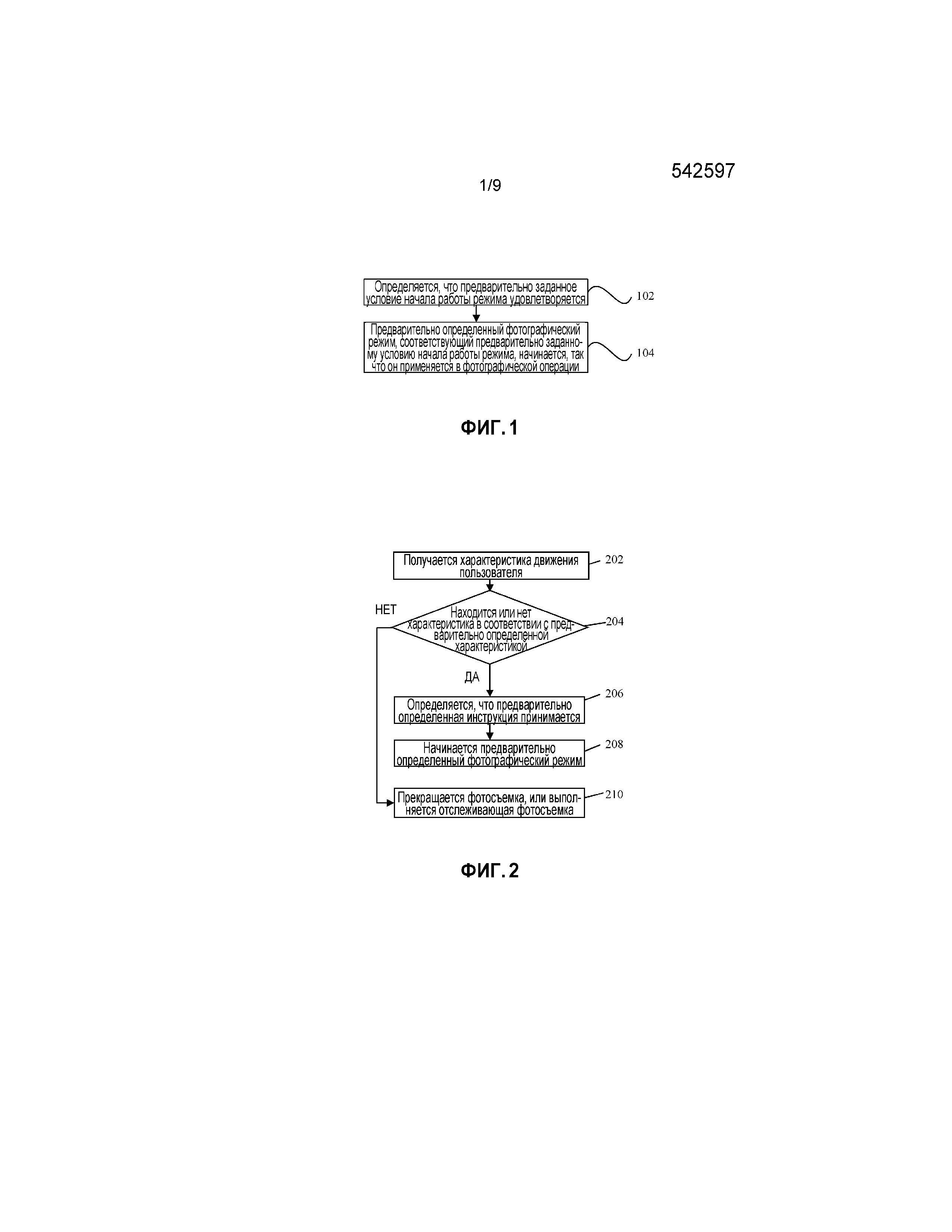
[0034] Фиг. 1 является блок-схемой последовательности операций способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления.
[0035] Фиг. 2 является блок-схемой последовательности операций другого способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления.
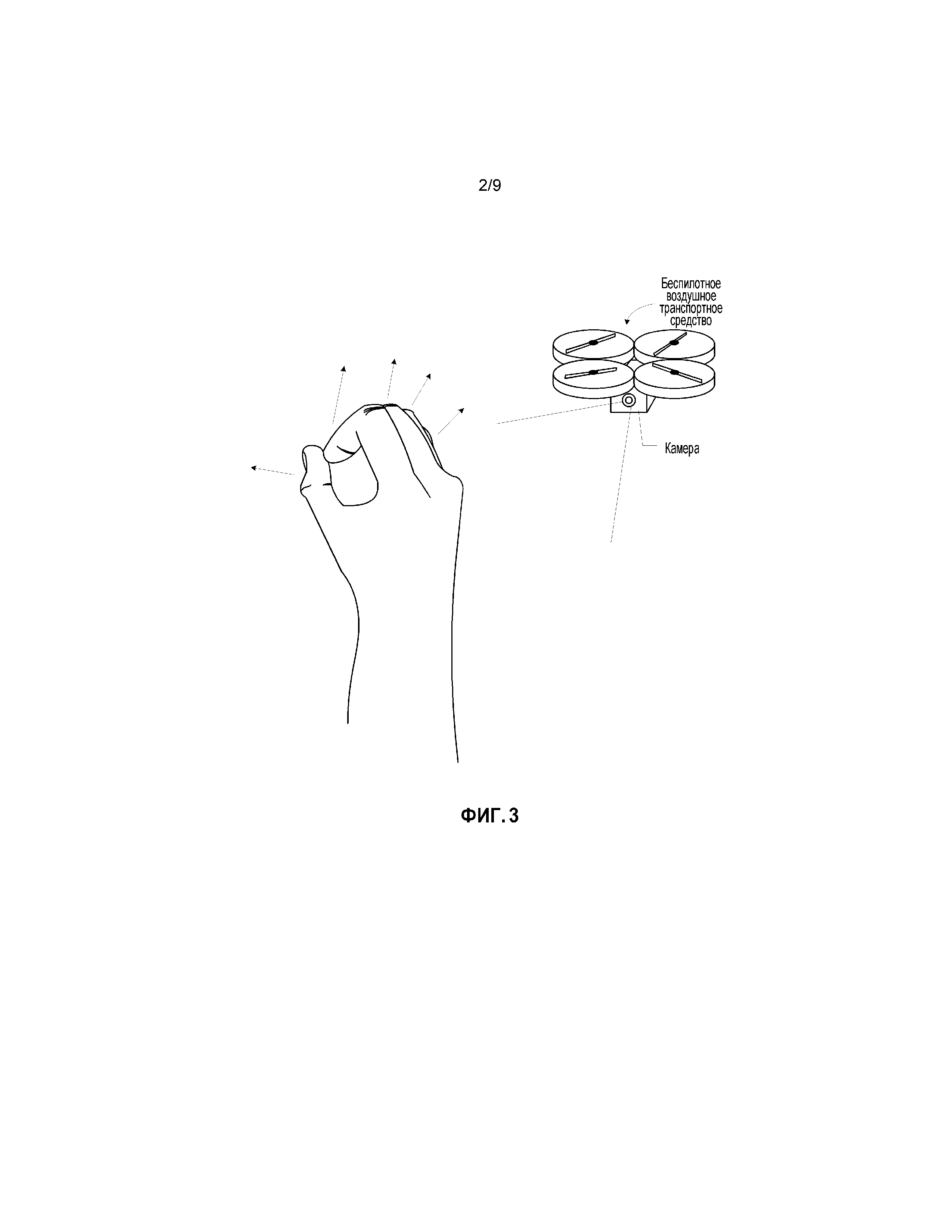
[0036] Фиг. 3 является принципиальной схемой, показывающей сцену, в которой беспилотный воздушное транспортное средство принимает пользовательскую инструкцию согласно примерному варианту осуществления.
[0037] Фиг. 4 является принципиальной схемой, показывающей другую сцену, в которой беспилотный воздушное транспортное средство принимает пользовательскую инструкцию согласно примерному варианту осуществления.
[0038] Фиг. 5 является блок-схемой последовательности операций еще одного способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления.
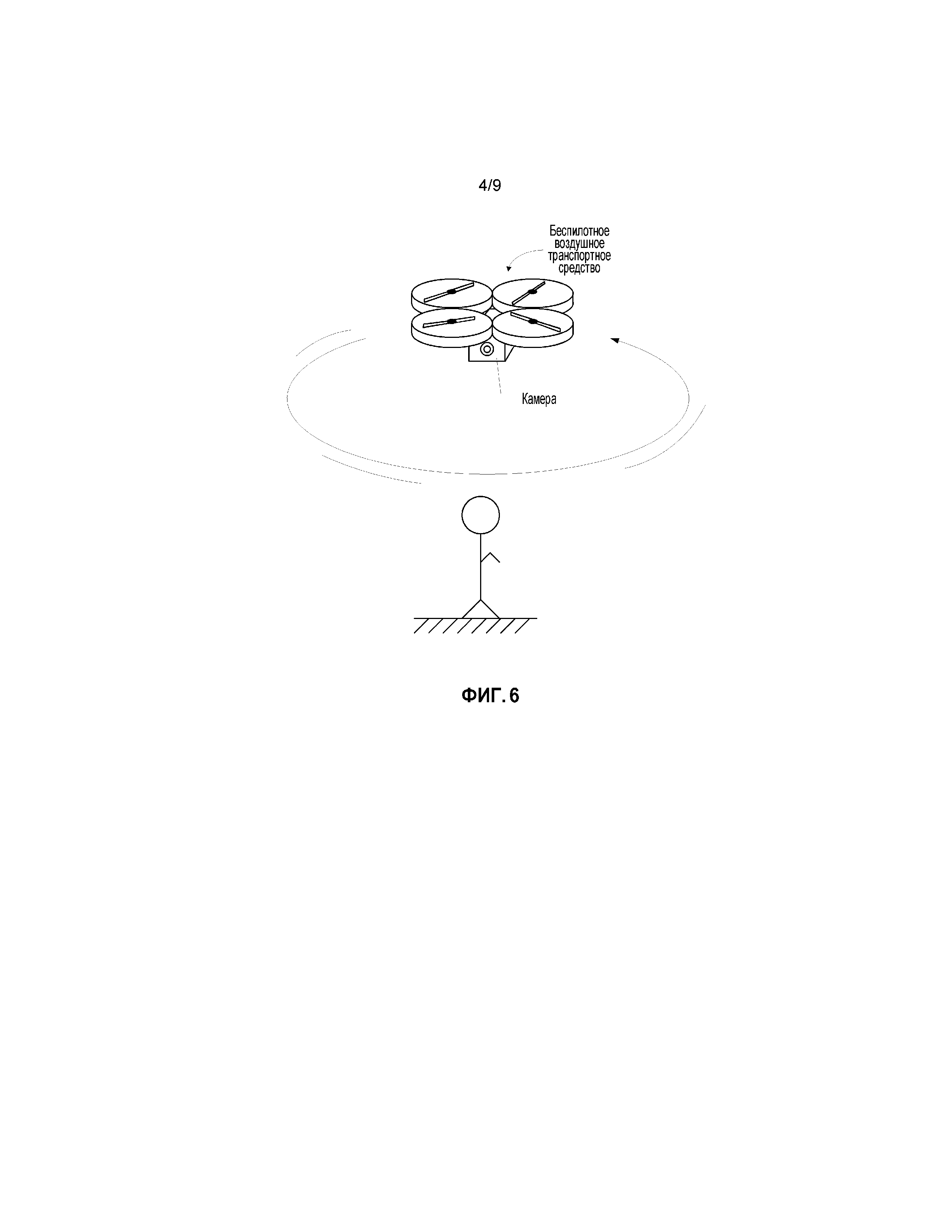
[0039] Фиг. 6 является принципиальной схемой, показывающей сцену, в которой беспилотный воздушное транспортное средство получает позу пользователя согласно примерному варианту осуществления.
[0040] Фиг. 7 является принципиальной схемой, показывающей другую сцену, в которой беспилотный воздушное транспортное средство получает позу пользователя согласно примерному варианту осуществления.
[0041] Фиг. 8 является принципиальной схемой, показывающей еще одну сцену, в которой беспилотный воздушное транспортное средство получает позу пользователя согласно примерному варианту осуществления.
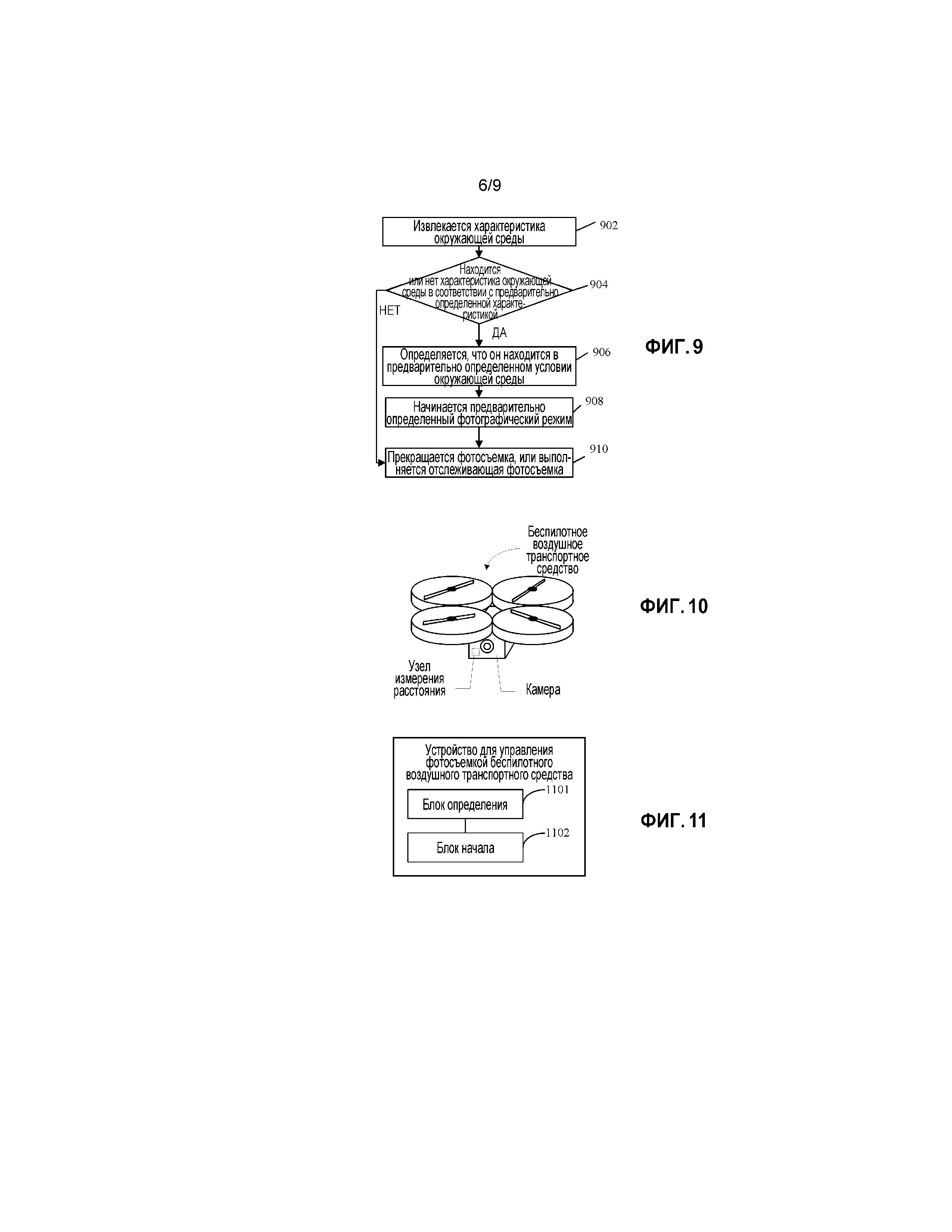
[0042] Фиг. 9 является блок-схемой последовательности операций еще одного другого способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления.
[0043] Фиг. 10 является принципиальной схемой, показывающей сцену, в которой беспилотный воздушное транспортное средство получает обнаруженные условия окружающей среды согласно примерному варианту осуществления.
[0044] Фиг. 11-17 являются блок-схемами устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления.
[0045] Фиг. 18 является принципиальной схемой устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления.
Осуществление изобретения
[0046] Ниже подробно описываются примерные варианты осуществления в данном документе, и их примеры проиллюстрированы в прилагаемых чертежах. На всех чертежах, упоминаемых в нижеприведенном описании, идентичная ссылка с номером на различных чертежах указывает идентичные или аналогичные элементы, если не указано иное. Реализации, описанные в нижеприведенных примерных вариантах осуществления, не представляют все реализации в соответствии с настоящим раскрытием сущности. Вместо этого, они представляют собой только примеры устройства и способа в соответствии с некоторыми аспектами настоящего раскрытия сущности, подробно описанными в прилагаемой формуле изобретения.
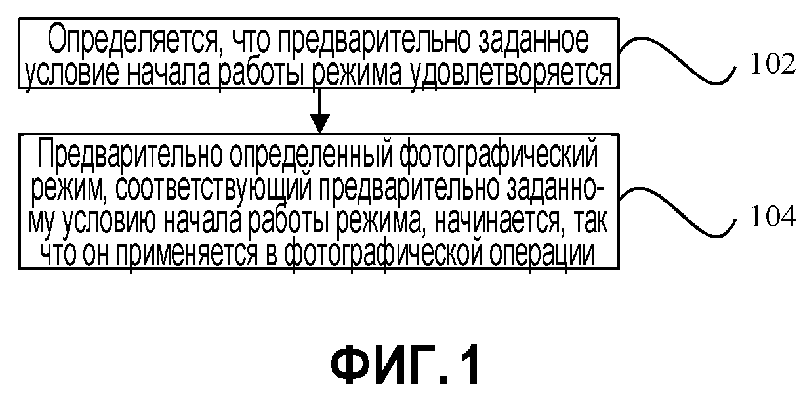
[0047] Как показано на фиг. 1, фиг. 1 является блок-схемой последовательности операций способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. Способ может использоваться в беспилотном воздушном транспортном средстве и включает в себя следующие этапы.
[0048] На этапе 102, определяется то, что предварительно заданное условие начала работы режима удовлетворяется.
[0049] В вариантах осуществления настоящего раскрытия сущности, предварительно заданное условие начала работы режима может включать в себя, по меньшей мере, одно из следующего: прием предварительно определенной инструкции, отправленной от пользователя; обнаружение того, что пользователь находится в предварительно определенной позе; и обнаружение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды.
[0050] В примерном варианте осуществления, когда предварительно заданное условие начала работы режима заключается в том, что предварительно определенная инструкция, отправленная от пользователя, принимается, характеристика движения пользователя может получаться, и определяется то, что предварительно определенная инструкция, отправленная от пользователя, принимается, и то, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика движения находится в соответствии с предварительно определенной характеристикой. Характеристика движения может получаться посредством выполнения получения изображений для пользователя; или связь с интеллектуальным устройством, носимым или используемым пользователем, может устанавливаться, и характеристика движения, полученная посредством интеллектуального устройства, может приниматься.
[0051] Соответственно, характеристика движения включает в себя график траектории, сформированный посредством жеста пользователя.
[0052] В другом примерном варианте осуществления, когда предварительно заданное условие начала работы режима заключается в том, что обнаруживается то, что пользователь находится в предварительно определенной позе, получение изображений может выполняться для пользователя, с тем чтобы определять позу пользователя; или связь с интеллектуальным устройством, носимым или используемым пользователем, может устанавливаться, предварительно определенный параметр физиологической характеристики пользователя, полученный посредством интеллектуального устройства, может приниматься, и поза пользователя может определяться согласно предварительно определенному параметру физиологической характеристики. Определяется то, что предварительно заданное условие начала работы режима удовлетворяется, если поза пользователя находится в соответствии с предварительно определенной позой.
[0053] Соответственно, предварительно определенная поза включает в себя, по меньшей мере, одно из следующего: статическая поза или поза при перемещении; и поза при размещении на горизонтальной поверхности, поза при размещении на подъеме или поза при размещении на спуске.
[0054] В еще одном другом примерном варианте осуществления, когда предварительно заданное условие начала работы режима заключается в том, что обнаруживается то, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды, получение изображений может выполняться для окружения, в котором находится беспилотный воздушное транспортное средство или пользователь, и характеристика окружающей среды, включенная в полученное изображение, может извлекаться; и определяется то, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды, и то, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика окружающей среды находится в соответствии с предварительно определенной характеристикой. Предварительно определенные условия окружающей среды, в которых находится беспилотный воздушное транспортное средство, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и распределение препятствий; предварительно определенные условия окружающей среды, в которых находится пользователь, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и число других пользователей, окружающих пользователя.
[0055] Соответственно, предварительно определенный фотографический режим включает в себя, по меньшей мере, одно из следующего: режим съемки крупным планом, режим перспективы, предварительно определенное расстояние от пользователя, предварительно определенный угол с пользователем и круговой фотографический режим с пользователем в качестве центра.
[0056] На этапе 104, предварительно определенный фотографический режим, соответствующий предварительно заданному условию начала работы режима, начинается, так что он применяется в фотографической операции.
[0057] В этом варианте осуществления, предварительно определенный фотографический режим может задаваться и сохраняться согласно принимаемой конфигурационной инструкции пользователя; или предварительно определенный фотографический режим, заданный другими пользователями, может получаться и сохраняться.
[0058] Из вышеописанного варианта осуществления можно видеть, что в настоящем раскрытии сущности, посредством задания соответствующего условия начала работы режима для каждого предварительно определенного фотографического режима, беспилотный воздушное транспортное средство может фактически знать предварительно определенный фотографический режим, который должен начинаться, если одно условие начала работы режима удовлетворяется, в силу этого обеспечивая фактические потребности по фотосъемке пользователя. Между тем, посредством автоматического переключения между предварительно определенными фотографическими режимами, пользователь не должен управлять полетом беспилотного воздушного транспортного средства вручную, так что аэрофотосъемка и другие дела могут быть закончены одновременно, в силу этого упрощая улучшение возможностей работы пользователей.
[0059] Ниже подробно описываются технические решения настоящего раскрытия сущности со ссылкой на конкретные варианты осуществления. Для целей описания, каждый вариант осуществления различается на основе различных начальных условий предварительно определенного режима. Как описано выше, предварительно заданное условие начала работы режима может включать в себя, по меньшей мере, одно из следующего: прием предварительно определенной инструкции, отправленной от пользователя; обнаружение того, что пользователь находится в предварительно определенной позе; и обнаружение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды.
[0060] Вариант 1 осуществления: прием предварительно определенной инструкции, отправленной от пользователя
[0061] Как показано на фиг. 2, фиг. 2 является блок-схемой последовательности операций другого способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. Способ может использоваться в беспилотном воздушном транспортном средстве и включать в себя следующие этапы.
[0062] На этапе 202, получается характеристика движения пользователя.
[0063] В этом варианте осуществления, могут быть предусмотрены различные способы получать характеристику движения пользователя, на основе различных сценариев применения, в которых находится беспилотный воздушное транспортное средство, что не ограничивается в данном документе. В этом случае, описываются только два возможных способа.
[0064] В одной ситуации, как показано на фиг. 3, беспилотный воздушное транспортное средство может выполнять получение изображений для пользователя посредством камеры непосредственно и выполнять анализ изображений по полученным видеоданным, с тем чтобы определять характеристику движения пользователя.
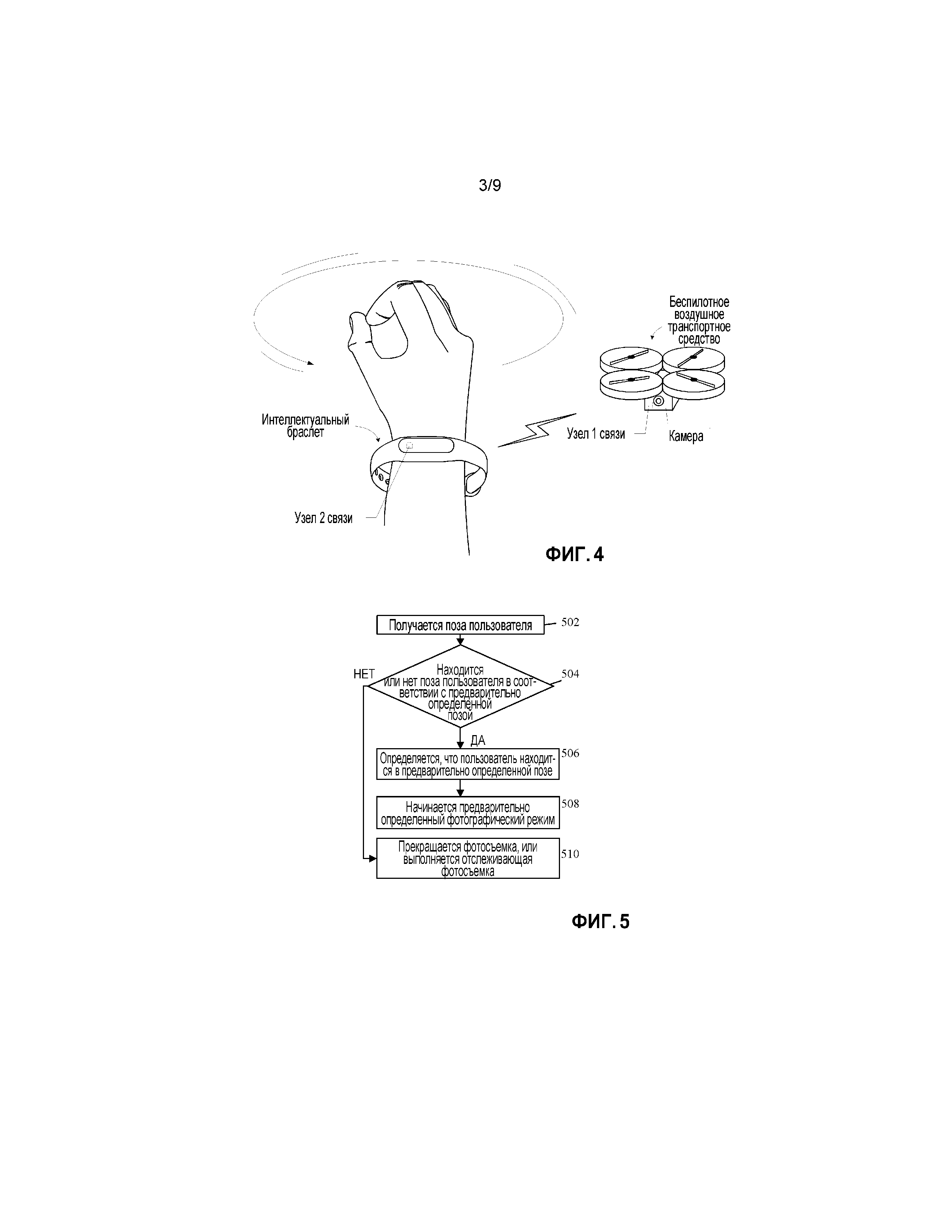
[0065] В другой ситуации, как показано на фиг. 4, при условии, что беспилотный воздушное транспортное средство содержит узел 1 связи, узел 1 связи может устанавливать связь с интеллектуальным устройством, носимым или используемым пользователем, и принимать характеристику движения, полученную посредством интеллектуального устройства. Например, интеллектуальное устройство может представлять собой интеллектуальный браслет, как показано на фиг. 4. Интеллектуальный браслет содержит кристалл (не показан), такой как датчик ускорения, датчик гравитации и т.п., и перемещается синхронно с перемещением руки пользователя, с тем чтобы получать характеристику движения пользователя посредством вышеуказанного кристалла и отправлять полученную характеристику движения в беспилотный воздушное транспортное средство через беспроводную связь между узлом 2 связи, предоставленным в интеллектуальном браслете, и узлом 1 связи, предоставленным в беспилотном воздушном транспортном средстве. Узел 1 связи может обмениваться данными с узлом 2 связи любыми способами, например, в режиме ближней связи (таком как Bluetooth, Wi-Fi и т.д.) или в режиме дальней связи (таком как 2G, 3G, 4G и т.д.).
[0066] На этапе 204, определяется то, находится или нет характеристика в соответствии с предварительно определенной характеристикой, если "Да", выполняется этап 206, в противном случае, выполняется этап 210.
[0067] В этом варианте осуществления, соответствующая предварительно определенная характеристика может задаваться согласно предварительно заданному условию начала работы режима. Кроме того, пользователь может редактировать ее согласно фактическим потребностям, чтобы удовлетворять собственные привычки и предпочтения при использовании.
[0068] На этапе 206, определяется то, что предварительно определенная инструкция принимается.
[0069] На этапе 208, начинается предварительно определенный фотографический режим.
[0070] В качестве примерного варианта осуществления, характеристика движения может представлять собой график траектории, сформированный посредством жеста пользователя. Предполагается, что предварительно определенная характеристика представляет собой график траектории, сформированный посредством раскрытия пяти пальцев. Как показано на фиг. 3, когда пользователь осуществляет жест раскрытия пяти пальцев, камера может получать и формировать соответствующий график траектории, и затем соответствующий предварительно определенный фотографический режим может определяться посредством поиска предварительно определенной характеристики, совпадающей с этим графиком траектории. Например, при условии, что предварительно определенный фотографический режим представляет собой "режим съемки крупным планом", беспилотный воздушное транспортное средство управляет линзой камеры таким образом, чтобы увеличивать или уменьшать масштаб, с тем чтобы взять крупный план лица или других частей пользователя.
[0071] В качестве другого примерного варианта осуществления, как показано на фиг. 4, интеллектуальный браслет может формировать соответствующий график траектории согласно обнаруженному движению пользователя и отправлять график траектории в беспилотный воздушное транспортное средство. Соответственно, после приема графика траектории, отправленного посредством интеллектуального браслета, беспилотный воздушное транспортное средство может определять соответствующий предварительно определенный фотографический режим посредством поиска предварительно определенной характеристики, совпадающей с графиком траектории. Например, при условии, что предварительно определенная характеристика представляет собой "круговую траекторию в горизонтальном направлении", соответствующий фотографический режим представляет собой "круговой фотографический режим с пользователем в качестве центра". Когда характеристика движения пользователя, показанная на фиг. 4, находится в соответствии с предварительно определенной характеристикой, беспилотный воздушное транспортное средство летит по кругу с пользователем в качестве центра и предварительно определенным расстоянием в качестве радиуса и снимает изображения посредством направления линзы камеры на пользователя все время.
[0072] На этапе 210, прекращается фотосъемка, или выполняется отслеживающая фотосъемка.
[0073] В этом варианте осуществления, когда беспилотный воздушное транспортное средство прекращает фотосъемку, беспилотный воздушное транспортное средство может закрывать камеру и садиться рядом с пользователем, и беспилотный воздушное транспортное средство приземляется; или беспилотный воздушное транспортное средство может закрывать камеру, но продолжать лететь, например, лететь посредством следования за пользователем (например, идентифицирует позицию пользователя и летит с поддержанием предварительно определенного расстояния от пользователя).
[0074] Когда беспилотный воздушное транспортное средство выполняет "отслеживающую фотосъемку", беспилотный воздушное транспортное средство может поддерживать камеру в открытом состоянии и лететь, например, посредством следования за пользователем.
[0075] Вариант 2 осуществления: обнаружение того, что пользователь находится в предварительно определенной позе
[0076] Фиг. 5 является блок-схемой последовательности операций еще одного способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. Как показано на фиг. 5, способ может использоваться в беспилотном воздушном транспортном средстве и включать в себя следующие этапы.
[0077] На этапе 502, получается поза пользователя.
[0078] В этом варианте осуществления, могут быть предусмотрены различные способы получать позу пользователя, на основе различных сценариев применения, в которых находится беспилотный воздушное транспортное средство, что не ограничивается в данном документе. Аналогично варианту 1 осуществления, возникают следующие ситуации.
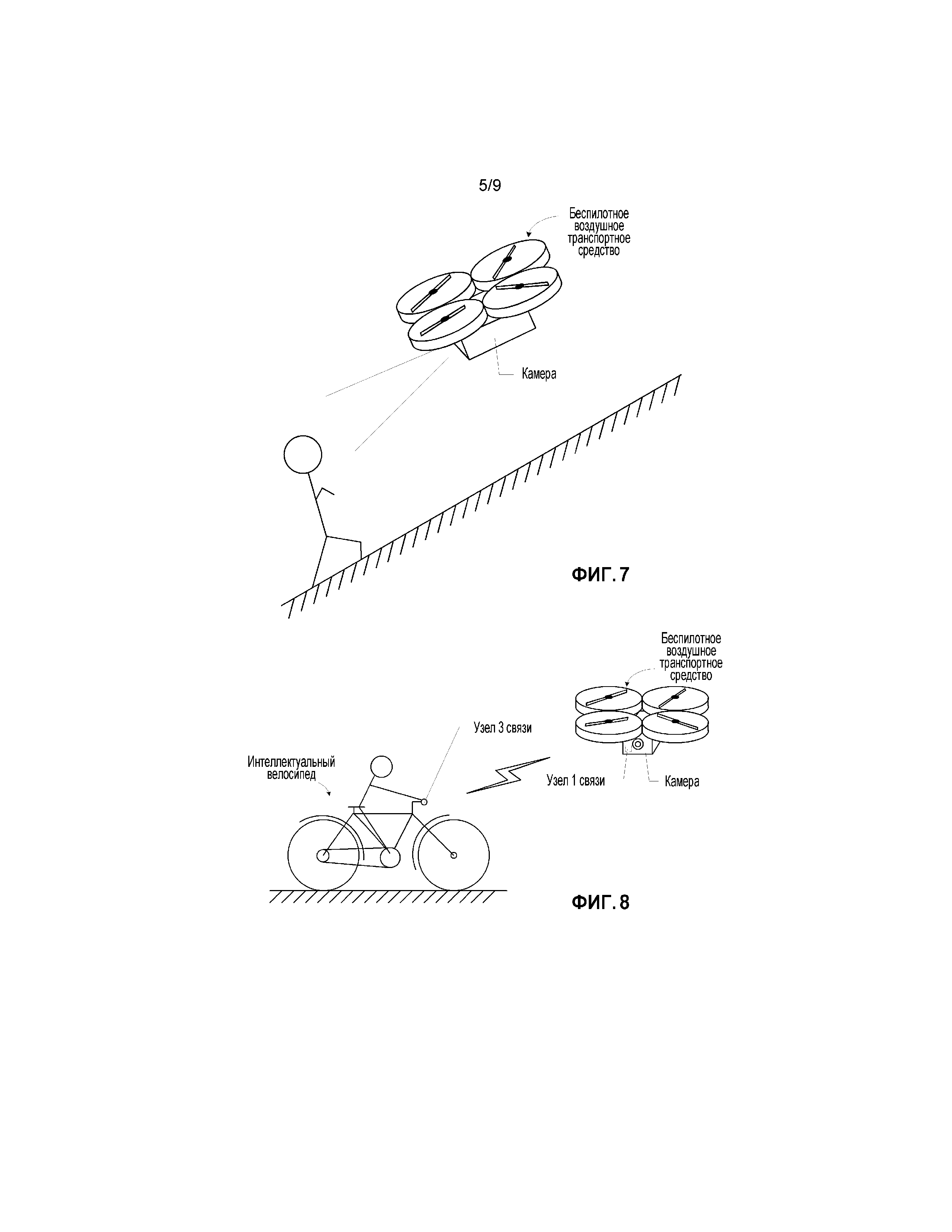
[0079] В одной ситуации, как показано на фиг. 6-7, беспилотный воздушное транспортное средство может выполнять получение изображений для пользователя посредством камеры непосредственно и выполнять анализ изображений по полученным видеоданным, с тем чтобы определять позу пользователя.
[0080] В другой ситуации, как показано на фиг. 8, при условии, что беспилотный воздушное транспортное средство содержит узел 1 связи, узел 1 связи может устанавливать связь с интеллектуальным устройством, носимым или используемым пользователем, и принимать позу пользователя, полученную посредством интеллектуального устройства. Например, интеллектуальное устройство может представлять собой интеллектуальный велосипед, как показано на фиг. 8. Интеллектуальный велосипед содержит кристалл (не показан), такой как датчик ускорения, датчик гравитации и т.п., и определяет позу пользователя посредством вышеуказанного кристалла и отправляет полученную характеристику движения в беспилотный воздушное транспортное средство через беспроводную связь между узлом 3 связи, предоставленным в интеллектуальном велосипеде, и узлом 1 связи, предоставленным в беспилотном воздушном транспортном средстве. Узел 1 связи может обмениваться данными с узлом 3 связи любыми способами, например, в режиме ближней связи (таком как Bluetooth, Wi-Fi и т.д.) или в режиме дальней связи (таком как 2G, 3G, 4G и т.д.).
[0081] На этапе 504, определяется то, находится или нет поза пользователя в соответствии с предварительно определенной позой, если "Да", выполняется этап 506, в противном случае, выполняется этап 510.
[0082] В этом варианте осуществления, соответствующая предварительно определенная поза может задаваться согласно предварительно заданному условию начала работы режима. Кроме того, пользователь может редактировать ее согласно фактическим потребностям, чтобы удовлетворять собственные привычки и предпочтения при использовании.
[0083] На этапе 506, определяется то, что пользователь находится в предварительно определенной позе.
[0084] На этапе 508, начинается предварительно определенный фотографический режим.
[0085] Реализация 1
[0086] В качестве примерной реализации, предварительно определенная поза может включать в себя: позу при размещении на горизонтальной поверхности, позу при размещении на подъеме или позу при размещении на спуске.
[0087] Как показано на фиг. 6, предполагается, что пользователь стоит горизонтально на земле. После съемки изображений для пользователя, беспилотный воздушное транспортное средство может определять позу пользователя множеством способов, например, посредством идентификации угла между пользователем и землей; определения угла между самим беспилотным воздушным транспортным средством и горизонтальной плоскостью посредством гироскопа и т.п., определения угла между пользователем и горизонтальной плоскостью согласно углу формирования изображений пользователя в фотографическом изображении.
[0088] На фиг. 6, поза пользователя представляет собой "позу при размещении на горизонтальной поверхности". Соответствующий предварительно определенный фотографический режим может определяться посредством поиска предварительно определенной позы, совпадающей с позой пользователя. Например, предварительно определенный фотографический режим может представлять собой "круговой фотографический режим с пользователем в качестве центра".
[0089] В качестве другого примера, как показано на фиг. 7, предполагается, что пользователь расположен на наклонной поверхности с подъемом, беспилотный воздушное транспортное средство может определять то, что поза пользователя представляет собой "позу при размещении на подъеме", посредством съемки изображений, и затем определяет соответствующий предварительно определенный фотографический режим посредством поиска предварительно определенной позы, совпадающей с позой пользователя. Например, предварительно определенный фотографический режим может представлять собой "режим съемки крупным планом".
[0090] Реализация 2
[0091] В качестве другой примерной реализации, предварительно определенная поза может представлять собой статическую позу или позу при перемещении.
[0092] Как показано на фиг. 8, после того, как начинается функция интеллектуального велосипеда, поза интеллектуального велосипеда может использоваться в качестве позы пользователя. Например, интеллектуальный велосипед может содержать кристалл, такой как датчик ускорения и т.п., который может идентифицировать то, находится интеллектуальный велосипед в статическом состоянии или в состоянии перемещения.
[0093] После того, как интеллектуальный велосипед определяет то, что он находится в статическом состоянии или состоянии перемещения, интеллектуальный велосипед может отправлять эти данные в качестве позы пользователя в узел 1 связи через узел 3 связи, так что беспилотный воздушное транспортное средство может знать позу пользователя. Затем соответствующий предварительно определенный фотографический режим может определяться посредством поиска предварительно определенной позы, совпадающей с позой пользователя. Например, когда пользователь находится в статической позе, предварительно определенный фотографический режим может представлять собой "круговой фотографический режим с пользователем в качестве центра". Кроме того, когда пользователь находится в состоянии перемещения, предварительно определенный фотографический режим может представлять собой "режим перспективы".
[0094] На этапе 510, прекращается фотосъемка, или выполняется отслеживающая фотосъемка.
[0095] Вариант 3 осуществления: обнаружение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды
[0096] Фиг. 9 является блок-схемой последовательности операций еще одного другого способа для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. Как показано на фиг. 9, способ может использоваться в беспилотном воздушном транспортном средстве и включать в себя следующие этапы.
[0097] На этапе 902, извлекается характеристика окружающей среды.
[0098] В этом варианте осуществления, могут быть предусмотрены различные способы получать позу пользователя, на основе различных сценариев применения, в которых находится беспилотный воздушное транспортное средство, что не ограничивается в данном документе.
[0099] В одной ситуации, как показано на фиг. 10, беспилотный воздушное транспортное средство может выполнять получение изображений для пользователя посредством камеры непосредственно и выполнять анализ изображений по полученным видеоданным, с тем чтобы извлекать характеристику окружающей среды, включенную в полученное изображение.
[00100] В другой ситуации, как показано на фиг. 10, беспилотный воздушное транспортное средство может содержать такой датчик, как дальномер и т.п., который может измерять расстояние беспилотного воздушного транспортного средства от препятствия, с тем чтобы определять пространственный диапазон для полета беспилотного воздушного транспортного средства.
[00101] На этапе 904, определяется то, находится или нет характеристика окружающей среды в соответствии с предварительно определенной характеристикой, если "Да", выполняется этап 906, в противном случае, выполняется этап 910.
[00102] В этом варианте осуществления, соответствующая предварительно определенная характеристика может задаваться согласно предварительно заданному условию начала работы режима. Кроме того, пользователь может редактировать ее согласно фактическим потребностям, чтобы удовлетворять собственные привычки и предпочтения при использовании.
[00103] На этапе 906, определяется то, что он находится в предварительно определенных условиях окружающей среды.
[00104] На этапе 908, начинается предварительно определенный фотографический режим.
[00105] В этом варианте осуществления, предварительно определенные условия окружающей среды, в которых находится беспилотный воздушное транспортное средство, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и распределение препятствий; предварительно определенные условия окружающей среды, в которых находится пользователь, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды; окружение в помещениях и вне помещений; и число других пользователей, окружающих пользователя. Беспилотный воздушное транспортное средство может получать только характеристику окружающей среды для окружения, в котором он находится, или характеристику окружающей среды для окружения, в которой находится пользователь, либо может получать как характеристику окружающей среды для окружения, в котором он находится, так и характеристику окружающей среды для окружения, в которой находится пользователь, с тем чтобы определять то, находится он или нет в предварительно определенных условиях окружающей среды.
[00106] Например, при условии, что беспилотный воздушное транспортное средство обнаруживает то, что как он, так и пользователь находятся в окружении с высокой открытостью (к примеру, на лужайке на открытом воздухе), может начинаться предварительно определенный фотографический режим "круговой фотографический режим с пользователем в качестве центра". При условии, что беспилотный воздушное транспортное средство обнаруживает то, что как он, так и пользователь находятся в окружении в помещениях, и число других пользователей, окружающих пользователя, достигает предварительно определенного числа, определяется то, что они находятся в сценариях проведения конференции (к примеру, ежегодной встречи), и затем может начинаться предварительно определенный фотографический режим "режим перспективы".
[00107] На этапе 910, прекращается фотосъемка, или выполняется отслеживающая фотосъемка.
[00108] Следует отметить, что, хотя технические решения настоящего раскрытия сущности описываются посредством рассмотрения различных условий начала работы режима в качестве примера на фиг. 2, 5 и 9, специалисты в данной области техники должны понимать, что условие начала работы режима может работать отдельно или может работать посредством координирования с другим. Например, могут обнаруживаться поза пользователя и условия окружающей среды, в которых находится беспилотный воздушное транспортное средство, и может начинаться соответствующий предварительно определенный фотографический режим, если поза пользователя представляет собой предварительно определенную позу, и беспилотный воздушное транспортное средство находится в предварительно определенных условиях окружающей среды.
[00109] 1, предварительно определенный фотографический режим
[00110] В технических решениях настоящего раскрытия сущности, предварительно определенный фотографический режим может включать в себя, по меньшей мере, одно из следующего: режим съемки крупным планом, режим перспективы, предварительно определенное расстояние от пользователя, предварительно определенный угол с пользователем и круговой фотографический режим с пользователем в качестве центра. Безусловно, настоящее раскрытие сущности не ограничивает его; любой другой фотографический режим может применяться в технических решениях настоящего раскрытия сущности.
[00111] В технических решениях настоящего раскрытия сущности, помимо предварительно определенных фотографических режимов, уже заданных изготовителем, предварительно определенный фотографический режим в беспилотном воздушном транспортном средстве может получаться множеством способов.
[00112] В качестве примерного варианта осуществления, пользователь может непосредственно задавать предварительно определенный фотографический режим: беспилотный воздушное транспортное средство задает и сохраняет соответствующий предварительно определенный фотографический режим согласно принимаемой конфигурационной инструкции пользователя. В этом варианте осуществления, посредством определяемых пользователем или предварительно определенных фотографических режимов, могут удовлетворяться персонализированные потребности пользователя.
[00113] В качестве другого примерного варианта осуществления, пользователь может получать фотографический режим, заданный другими пользователями, в качестве предварительно определенного фотографического режима в своем беспилотном воздушном транспортном средстве: предварительно определенный фотографический режим, заданный другими пользователями, получается и сохраняется. В этом варианте осуществления, посредством получения фотографических режимов, заданных другими пользователями, это упрощает совместное использование ресурсов фотографических режимов пользователями и уменьшает потребность пользователя в персонализированной фотосъемке. Например, пользователь может загружать фотографический режим на беспилотный воздушное транспортное средство через Интернет, или пользователь может импортировать фотографический режим в беспилотный воздушное транспортное средство через USB-диск, SD-карту, провод передачи данных и т.п., после получения фотографического режима так или иначе.
[00114] Согласно вышеописанным вариантам осуществления способа для управления фотосъемкой беспилотного воздушного транспортного средства, настоящее раскрытие сущности дополнительно предоставляет варианты осуществления устройства для управления фотосъемкой беспилотного воздушного транспортного средства.
[00115] Фиг. 11 является блок-схемой устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. Ссылаясь на фиг. 11, устройство включает в себя блок 1101 определения и блок 1102 начала.
[00116] Блок 1101 определения сконфигурирован с возможностью определять то, что предварительно заданное условие начала работы режима удовлетворяется.
[00117] Блок 1102 начала сконфигурирован с возможностью начинать предварительно определенный фотографический режим, соответствующий предварительно заданному условию начала работы режима, так что он применяется в фотографической операции.
[00118] Альтернативно, предварительно заданное условие начала работы режима включает в себя, по меньшей мере, одно из следующего: прием предварительно определенной инструкции, отправленной от пользователя; обнаружение того, что пользователь находится в предварительно определенной позе; и обнаружение того, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды.
[00119] Альтернативно, предварительно определенная поза включает в себя, по меньшей мере, одно из следующего: статическая поза или поза при перемещении; и поза при размещении на горизонтальной поверхности, поза при размещении на подъеме или поза при размещении на спуске.
[00120] Альтернативно, предварительно определенные условия окружающей среды, в которых находится беспилотный воздушное транспортное средство, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды, окружение в помещениях и вне помещений и распределение препятствий; и предварительно определенные условия окружающей среды, в которых находится пользователь, включают в себя, по меньшей мере, одно из следующего: открытость окружающей среды, окружение в помещениях и вне помещений и число других пользователей, окружающих пользователя.
[00121] Альтернативно, предварительно определенный фотографический режим включает в себя, по меньшей мере, одно из следующего: режим съемки крупным планом, режим перспективы, предварительно определенное расстояние от пользователя, предварительно определенный угол с пользователем и круговой фотографический режим с пользователем в качестве центра.
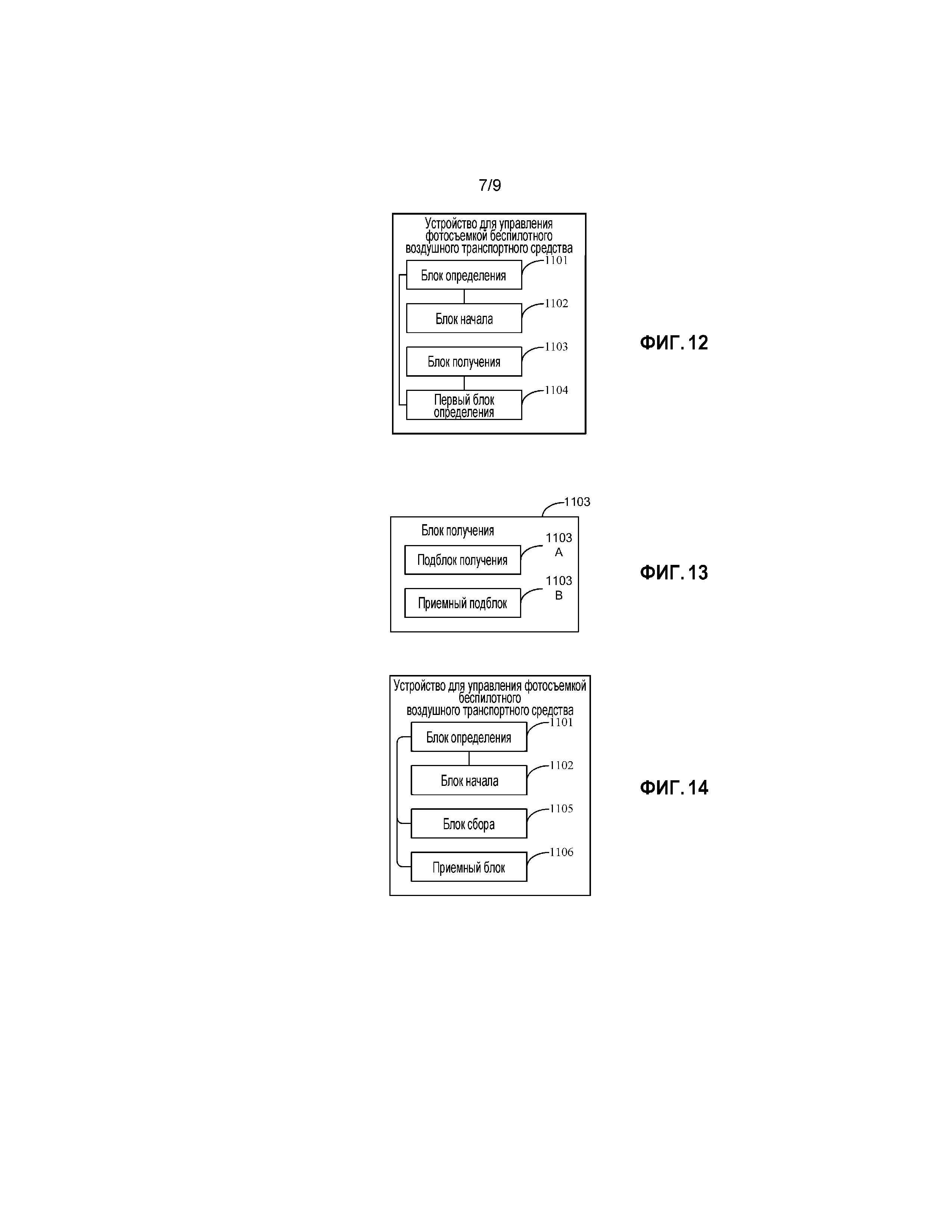
[00122] Как показано на фиг. 12, фиг. 12 является блок-схемой другого устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. На основе варианта осуществления, показанного на фиг. 11, устройство дополнительно включает в себя блок 1103 получения и первый блок 1104 определения.
[00123] Блок 1103 получения сконфигурирован с возможностью получать характеристику движения пользователя.
[00124] Первый блок 1104 определения сконфигурирован с возможностью определять то, что предварительно определенная инструкция, отправленная от пользователя, принимается, и то, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика движения находится в соответствии с предварительно определенной характеристикой.
[00125] Альтернативно, характеристика движения включает в себя график траектории, сформированный посредством жеста пользователя.
[00126] Как показано на фиг. 13, фиг. 13 является блок-схемой еще одного другого устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. На основе варианта осуществления, показанного на фиг. 12, блок 1103 получения включает в себя подблок 1103A получения или приемный подблок 1103B.
[00127] Подблок 1103A получения сконфигурирован с возможностью выполнять получение изображений для пользователя, с тем чтобы получать характеристику движения.
[00128] Приемный подблок 1103B сконфигурирован с возможностью устанавливать связь с интеллектуальным устройством, носимым или используемым пользователем, и принимать характеристику движения, полученную посредством интеллектуального устройства.
[00129] Как показано на фиг. 14, фиг. 14 является блок-схемой еще одного устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. На основе варианта осуществления, показанного на фиг. 11, устройство дополнительно включает в себя блок 1105 сбора или приемный блок 1106.
[00130] Блок 1105 сбора сконфигурирован с возможностью выполнять получение изображений для пользователя, с тем чтобы определять позу пользователя.
[00131] Приемный блок 1106 сконфигурирован с возможностью устанавливать связь с интеллектуальным устройством, носимым или используемым пользователем, принимать предварительно определенный параметр физиологической характеристики пользователя, полученный посредством интеллектуального устройства, и определять позу пользователя согласно предварительно определенному параметру физиологической характеристики.
[00132] Блок 1101 определения определяет то, что предварительно заданное условие начала работы режима удовлетворяется, если поза пользователя находится в соответствии с предварительно определенной позой.
[00133] Следует отметить, что, блок 1105 сбора или приемный блок 1106, включенные в устройство, показанное на фиг. 14, также могут быть включены в варианты осуществления устройства, показанные на фиг. 12-13, что не ограничивается в данном документе.
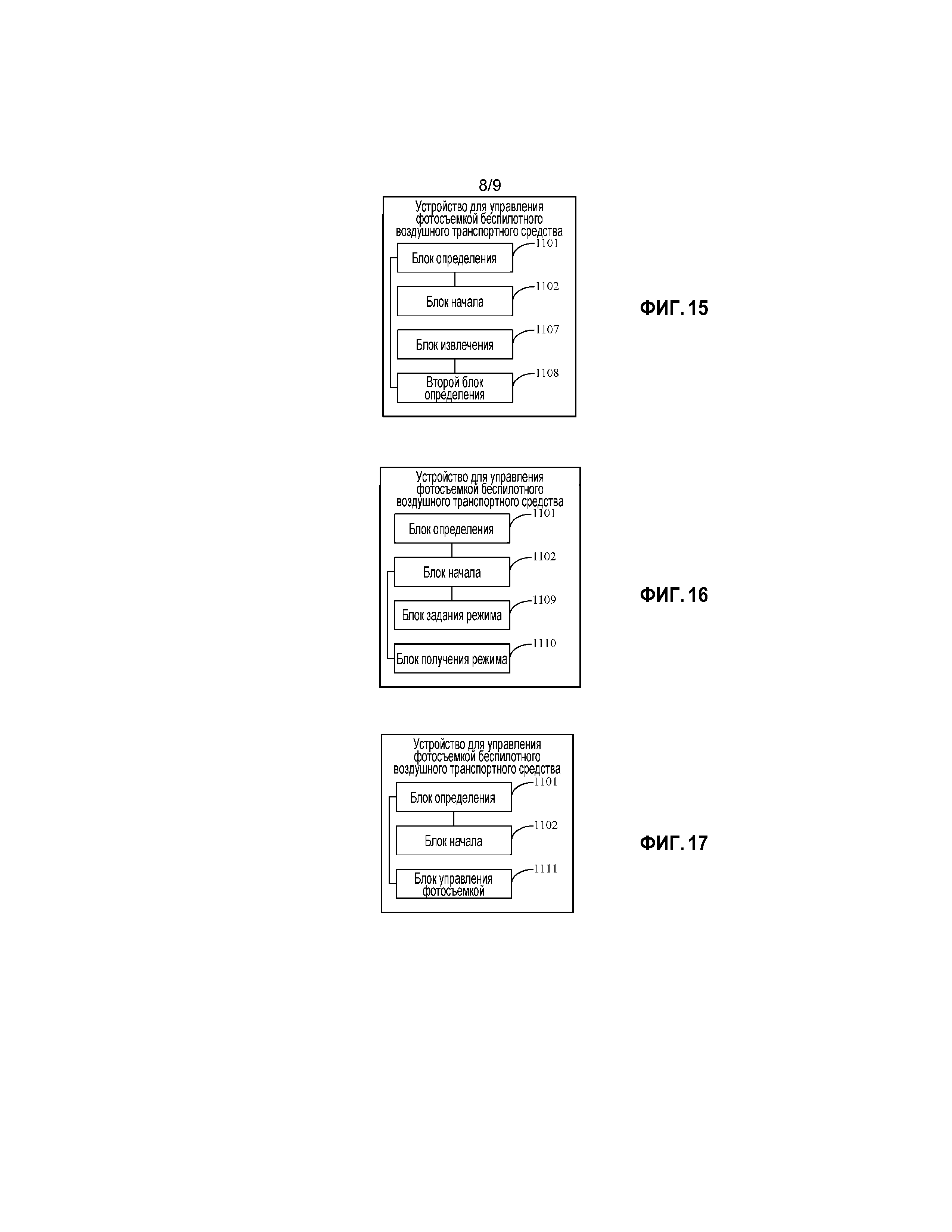
[00134] Как показано на фиг. 15, фиг. 15 является блок-схемой еще одного другого устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. На основе варианта осуществления, показанного на фиг. 11, устройство дополнительно включает в себя блок 1107 извлечения и второй блок 1108 определения.
[00135] Блок 1107 извлечения сконфигурирован с возможностью выполнять получение изображений для окружения, в котором находится беспилотный воздушное транспортное средство или пользователь, и извлекать характеристику окружающей среды, включенную в полученное изображение.
[00136] Второй блок 1108 определения сконфигурирован с возможностью определять то, что беспилотный воздушное транспортное средство или пользователь находится в предварительно определенных условиях окружающей среды, и то, что предварительно заданное условие начала работы режима удовлетворяется, если характеристика окружающей среды находится в соответствии с предварительно определенной характеристикой.
[00137] Следует отметить, что, блок 1107 извлечения и второй блок 1108 определения, включенные в устройство, показанное на фиг. 15, также могут быть включены в варианты осуществления устройства, показанные на фиг. 12-14, что не ограничивается в данном документе.
[00138] Как показано на фиг. 16, фиг. 16 является блок-схемой еще одного другого устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. На основе варианта осуществления, показанного на фиг. 11, устройство дополнительно включает в себя блок 1109 задания режима или блок 1110 получения режима.
[00139] Блок 1109 задания режима сконфигурирован с возможностью задавать и сохранять предварительно определенный фотографический режим согласно принимаемой конфигурационной инструкции пользователя.
[00140] Блок 1110 получения режима сконфигурирован с возможностью получать и сохранять предварительно определенный фотографический режим, заданный другими пользователями.
[00141] Следует отметить, что, блок 1109 задания режима или блок 1110 получения режима, включенные в устройство, показанное на фиг. 15, также могут быть включены в варианты осуществления устройства, показанные на фиг. 12-15, что не ограничивается в данном документе.
[00142] Как показано на фиг. 17, фиг. 17 является блок-схемой еще одного другого устройства для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. На основе варианта осуществления, показанного на фиг. 11, устройство дополнительно включает в себя блок 1111 управления фотосъемкой.
[00143] Блок 1111 управления фотосъемкой сконфигурирован с возможностью прекращать фотосъемку или выполнять отслеживающую фотосъемку, если предварительно заданное условие начала работы режима не удовлетворяется.
[00144] Относительно устройств в вышеописанных вариантах осуществления, конкретные способы для выполнения операций для отдельных модулей подробно описаны в вариантах осуществления относительно способов, так что дополнительная детализация не представляется повторно в данном документе.
[00145] Варианты осуществления устройств соответствуют вариантам осуществления способов. На предмет соответствующего контента, следует обратиться к частичным описаниям вариантов осуществления способов. Вышеописанные варианты осуществления устройств являются примерными. Блоки, описанные в качестве отдельных компонентов, могут быть физически разделены или не разделены. Компоненты, показанные как блоки, могут представлять собой или не представлять собой физические блоки, другими словами, могут быть интегрированы в одной позиции или распределены по множеству сетевых блоков. Некоторые либо все модули могут быть выбраны таким образом, чтобы достигать цели решения вариантой осуществления согласно фактическим требованиям. Специалисты в данной области техники могут понимать и реализовывать настоящее раскрытие сущности без прикладывания творческих усилий.
[00146] Соответственно, настоящее раскрытие сущности дополнительно предоставляет устройство для управления фотосъемкой беспилотного воздушного транспортного средства, включающее в себя: процессор; и запоминающее устройство, сконфигурированное с возможностью сохранять инструкции, выполняемые посредством процессора; при этом процессор сконфигурирован с возможностью: определять то, что предварительно заданное условие начала работы режима удовлетворяется; и начинать предварительно определенный фотографический режим, соответствующий предварительно заданному условию начала работы режима, так что он применяется в фотографической операции.
[00147] Соответственно, настоящее раскрытие сущности дополнительно предоставляет терминал, включающий в себя запоминающее устройство и одну или более программ, сохраненных в запоминающем устройстве и имеющих инструкции, сконфигурированные с возможностью выполняться посредством одного или более процессоров, чтобы выполнять следующие операции: определение того, что предварительно заданное условие начала работы режима удовлетворяется; и начало предварительно определенного фотографического режима, соответствующего предварительно заданному условию начала работы режима, так что он применяется в фотографической операции.
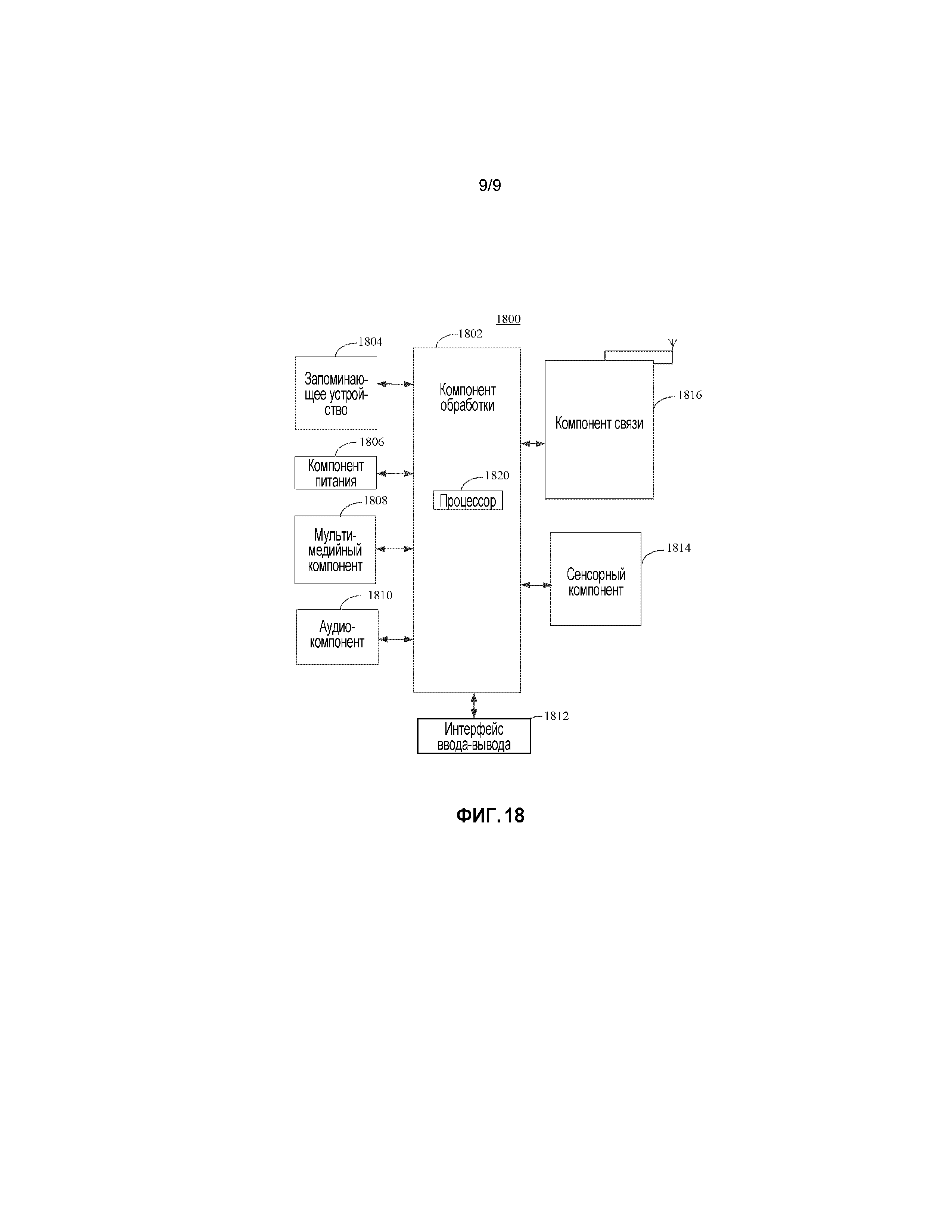
[00148] Фиг. 18 является принципиальной схемой устройства 1800 для управления фотосъемкой беспилотного воздушного транспортного средства согласно примерному варианту осуществления. Например, устройство 1800 может представлять собой мобильный телефон, компьютер, цифровой широковещательный терминал, устройство для обмена сообщениями, игровую приставку, планшетное устройство, медицинское устройство, тренажерное оборудование, персональное цифровое устройство и т.д.
[00149] Ссылаясь на фиг. 18, устройство 1800 может включать в себя следующие один или более компонентов: компонент 1802 обработки, запоминающее устройство 1804, компонент 1806 питания, мультимедийный компонент 1808, аудиокомпонент 1810, интерфейс 1812 ввода-вывода, сенсорный компонент 1814 и компонент 1816 связи.
[00150] Компонент 1802 обработки типично полностью управляет работой терминала 1800, к примеру, операциями, ассоциированными с отображением, телефонными вызовами, передачей данных, операциями камеры и операциями записи. Компонент 1802 обработки может включать в себя один или более процессоров 1820 для того, чтобы выполнять инструкции, чтобы выполнять все или часть этапов в вышеописанных способах. Кроме того, компонент 1802 обработки может включать в себя один или более модулей, которые упрощают взаимодействие между компонентом 1802 обработки и другими компонентами. Например, компонент 1802 обработки может включать в себя мультимедийный модуль для того, чтобы упрощать взаимодействие между мультимедийным компонентом 1808 и компонентом 1802 обработки.
[00151] Запоминающее устройство 1804 сконфигурировано с возможностью сохранять различные типы данных для того, чтобы поддерживать работу терминала 1800. Примеры таких данных включают в себя инструкции для любых приложений или способов, работающих на терминале 1800, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Запоминающее устройство 1804 может реализовываться с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств либо комбинации вышеозначенного, например, как статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[00152] Компонент 1806 питания предоставляет питание в различные компоненты терминала 1800. Компонент 1806 питания может включать в себя систему управления питанием, один или более источников питания и любые другие компоненты, ассоциированные с формированием, управлением и распределением питания терминала 1800.
[00153] Мультимедийный компонент 1808 включает в себя экран, предоставляющий интерфейс вывода между терминалом 1800 и пользователем. В некоторых вариантах осуществления, экран может включать в себя жидкокристаллический дисплей (ЖК-дисплей) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть реализован в качестве сенсорного экрана для того, чтобы принимать входные сигналы от пользователя. Сенсорная панель включает в себя один или более датчиков касания для того, чтобы считывать касания, проведения по экрану и другие жесты на сенсорной панели. Датчики касания могут не только считывать границу действия касания или проведения по экрану, но также и считывать длительность и давление, ассоциированное с действием касания или проведения по экрану. В некоторых вариантах осуществления, мультимедийный компонент 1808 включает в себя фронтальную камеру и/или тыловую камеру. Фронтальная камера и тыловая камера могут принимать внешние мультимедийные данные в то время, когда терминал 1800 находится в рабочем режиме, к примеру, в режиме фотосъемки или в видеорежиме. Каждая из фронтальной камеры и тыловой камеры может представлять собой систему с фиксированной оптической линзой либо иметь характеристики фокусировки и оптического масштабирования.
[00154] Аудиокомпонент 1810 сконфигурирован с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 1810 включает в себя микрофон (MIC), сконфигурированный с возможностью принимать внешний аудиосигнал, когда интеллектуальный терминал 1800 находится в рабочем режиме, к примеру, в режиме вызова, в режиме записи и в режиме распознавания речи. Принимаемый аудиосигнал может быть дополнительно сохранен в запоминающем устройстве 1804 или передан через компонент 1816 связи. В некоторых вариантах осуществления, аудиокомпонент 1810 дополнительно включает в себя динамик для того, чтобы выводить аудиосигналы.
[00155] Интерфейс 1812 ввода-вывода предоставляет интерфейс для компонента 1802 обработки и периферийных интерфейсных модулей, таких как клавиатура, колесико с кнопками, кнопки и т.п. Кнопки могут включать в себя, но не только, кнопку перехода на домашнюю страницу, кнопку громкости, кнопку запуска и кнопку блокировки.
[00156] Сенсорный компонент 1814 включает в себя один или более датчиков, чтобы предоставлять оценки состояния различных аспектов терминала 1800. Например, сенсорный компонент 1814 может обнаруживать открытое/закрытое состояние терминала 1800 и относительное позиционирование компонентов (например, дисплея и клавишной панели терминала 1800). Сенсорный компонент 1814 также может обнаруживать изменение позиции терминала 1800 или компонента в терминале 1800, присутствие или отсутствие контакта пользователя с терминалом 1800, ориентацию или ускорение/замедление терминала 1800 и изменение температуры терминала 1800. Сенсорный компонент 1814 может включать в себя бесконтактный датчик, сконфигурированный с возможностью обнаруживать присутствие находящихся рядом объектов без физического контакта. Сенсорный компонент 1814 также может включать в себя светочувствительный датчик, такой как CMOS- или CCD-датчик изображений, для использования в приложениях формирования изображений. В некоторых вариантах осуществления, сенсорный компонент 1814 также может включать в себя датчик акселерометра, гиродатчик, магнитный датчик, датчик давления или температурный датчик.
[00157] Компонент 1816 связи сконфигурирован с возможностью упрощать проводную или беспроводную связь между терминалом 1800 и другими устройствами. Терминал 1800 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как Wi-Fi, 2G или 3G или комбинация вышеозначенного. В одном примерном варианте осуществления, компонент 1816 связи принимает широковещательный сигнал или ассоциированную с широковещательной передачей информацию из внешней системы управления широковещательной передачей через широковещательный канал. В одном примерном варианте осуществления, компонент 1816 связи дополнительно включает в себя модуль связи ближнего радиуса действия (NFC) для того, чтобы упрощать ближнюю связь. Например, NFC-модуль может реализовываться на основе технологии радиочастотной идентификации (RFID), технологии по стандарту Ассоциации по передаче данных в инфракрасном диапазоне (IrDA), технологии по стандарту сверхширокополосной связи (UWB), технологии Bluetooth (BT) и других технологий.
[00158] В примерных вариантах осуществления, устройство 1800 может реализовываться с помощью одной или более специализированных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для осуществления вышеописанных способов.
[00159] В примерных вариантах осуществления, также предусмотрен энергонезависимый машиночитаемый носитель хранения данных, включающий в себя инструкции, к примеру, запоминающее устройство 1804, включающее в себя инструкции. Вышеуказанные инструкции выполняются посредством процессора 1820 в устройстве 1800 для осуществления вышеописанных способов. Например, энергонезависимый машиночитаемый носитель хранения данных может представлять собой ROM, RAM, CD-ROM, магнитную ленту, гибкий диск и оптическое устройство хранения данных и т.п.
[00160] Другие варианты осуществления настоящего раскрытия сущности должны быть очевидными для специалистов в данной области техники в ходе изучения подробного описания и практического применения настоящего раскрытия сущности, раскрытого здесь. Эта заявка имеет намерение охватывать все изменения, варианты использования или адаптации настоящего раскрытия сущности согласно его общим принципам, в том числе такие отклонения от настоящего раскрытия сущности, которые попадают в рамки общеизвестной или обычной практики в данной области техники. Подразумевается, что подробное описание и примеры должны считаться только примерными, при этом истинный объем и сущность настоящего раскрытия сущности указывается посредством прилагаемой формулы изобретения.
[00161] Следует принимать во внимание, что настоящее раскрытие сущности не ограничено точной структурой, которая описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут вноситься без отступления от его объема. Подразумевается, что объем настоящего раскрытия сущности должен быть ограничен только посредством прилагаемой формулы изобретения.
Способ и устройство для отображения изображений
Способ и устройство для сохранения строки
Способ, устройство и терминал для восстановления микропрограммы
Способ и устройство для тестирования терминала
Способ и устройство для отображения разговорного интерфейса
Способ и устройство для управления самоуравновешивающимся транспортным средством
Способ и устройство для передачи облачной карты
Способ, аппарат и система связи для носимого устройства
Способ и устройство для представления информации по билету
Способ, устройство и терминал для формирования видеоэффектов
Способ и устройство для отзыва сообщения
Способ и устройство управления балансирующей тележкой
Способ и устройство для получения объема воды для увлажнителя

