Результат интеллектуальной деятельности: УСТРОЙСТВО ПРОКЛАДКИ МАРШРУТА И НАВИГАЦИИ ПО МАРШРУТУ И СПОСОБ ПРОКЛАДКИ МАРШРУТА И НАВИГАЦИИ ПО МАРШРУТУ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству прокладки маршрута и навигации по маршруту и к способу прокладки маршрута и навигации по маршруту.
Уровень техники
[0002] Известны навигационные устройства для указания маршрутов движения в пункты назначения. Патентный документ 1 раскрывает навигационное устройство, которое, когда имеется точка разветвления на маршруте движения, указывает расстояние до точки разветвления и направляет рассматриваемое транспортное средство в полосу движения для движения при приближении к точке разветвления.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2009-133801
Сущность изобретения
Техническая задача
[0004] Согласно навигационному устройству, раскрытому в патентном документе 1, водитель может распознавать полосу движения для движения при приближении к точке разветвления, но путается касательно того, в какой точке надлежит сменять полосу движения. Точка для прокладки маршрута и навигации для инструктирования водителю сменять полосу движения может быть предварительно установлена; тем не менее, в зависимости от дорожных условий, точка для прокладки маршрута и навигации может быть расположена непосредственно перед точкой въезда в поток, в которой водитель не может плавно сменять полосу движения.
[0005] Настоящее изобретение осуществлено с учетом традиционных проблем. Цель настоящего изобретения заключается в том, чтобы предоставлять устройство прокладки маршрута и навигации по маршруту и способ прокладки маршрута и навигации по маршруту для предоставления надлежащей точки для смены полосы движения в зависимости от дорожных условий.
Решение задачи
[0006] Устройство прокладки маршрута и навигации по маршруту согласно аспекту настоящего изобретения обнаруживает позицию рассматриваемого транспортного средства и полосы движения, определяет то, должно или нет рассматриваемое транспортное средство сменять обнаруженную полосу движения на другую полосу движения таким образом, чтобы двигаться к соединению дорог или перекрестку на маршруте движения, определяет то, удовлетворяет либо нет дорога между обнаруженной позицией рассматриваемого транспортного средства и соединением дорог или перекрестком дорожным условиям, и когда определяется то, что рассматриваемое транспортное средство должно сменять полосу движения на другую полосу движения, и дорога между позицией рассматриваемого транспортного средства и соединением дорог или перекрестком удовлетворяет дорожным условиям, изменяет точку для того, чтобы предоставлять прокладку маршрута и навигацию с тем, чтобы сменять полосу движения в зависимости от дорожных условий. Устройство прокладки маршрута и навигации по маршруту предоставляет прокладку маршрута и навигацию, чтобы сменять полосу движения перед точкой, удовлетворяющей дорожным условиям, когда расстояние от точки, измененной в зависимости от дорожных условий, до соединения дорог или перекрестка меньше предварительно определенного расстояния, и предоставляет прокладку маршрута и навигацию, чтобы сменять полосу движения впереди точки, удовлетворяющей дорожным условиям, когда расстояние от точки, измененной в зависимости от дорожных условий, до соединения дорог или перекрестка больше предварительно определенного расстояния. Дорожные условия включают в себя точку въезда в поток и точку разветвления.
Преимущества изобретения
[0007] Настоящее изобретение может предоставлять надлежащую точку для смены полосы движения в зависимости от дорожных условий.
Краткое описание чертежей
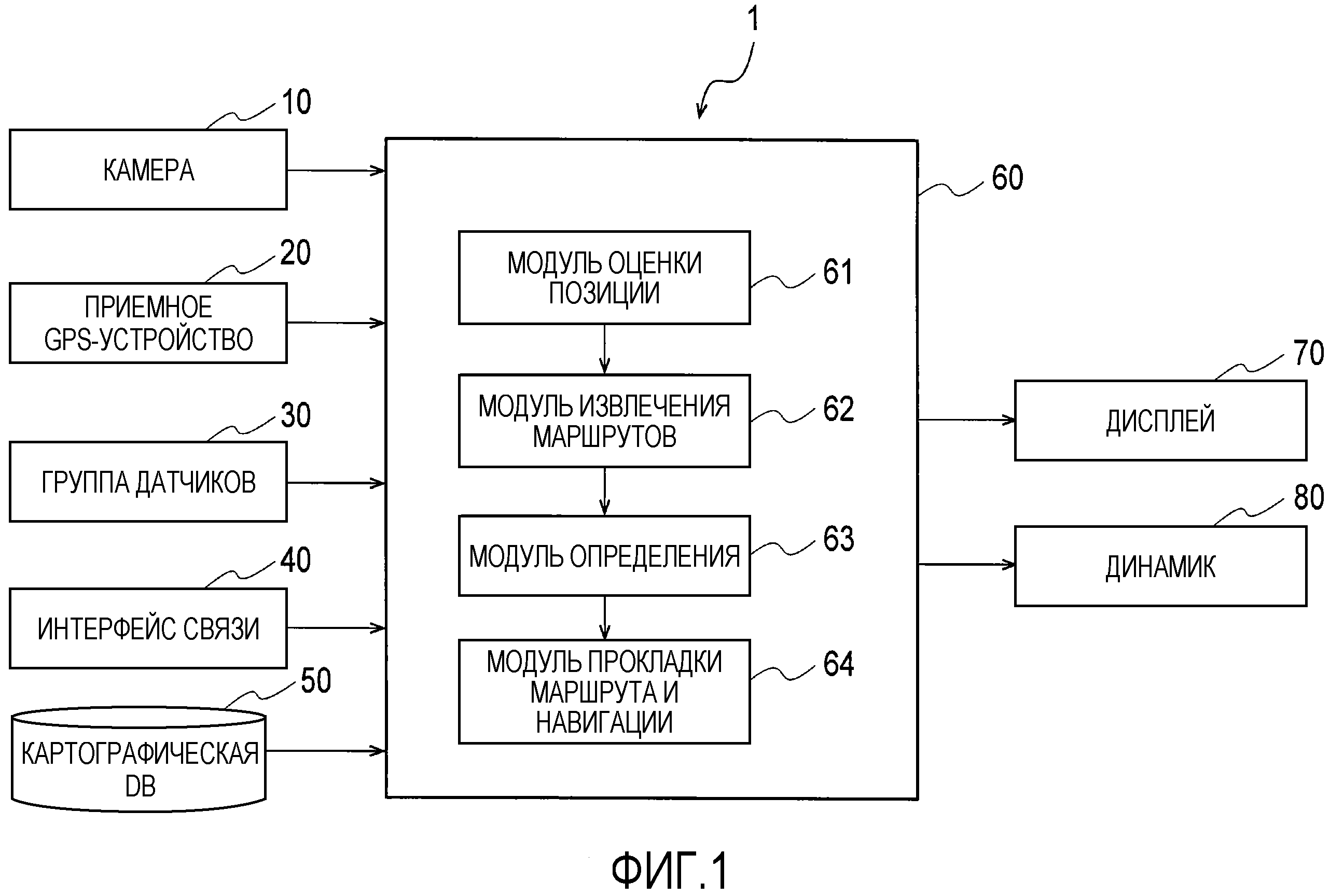
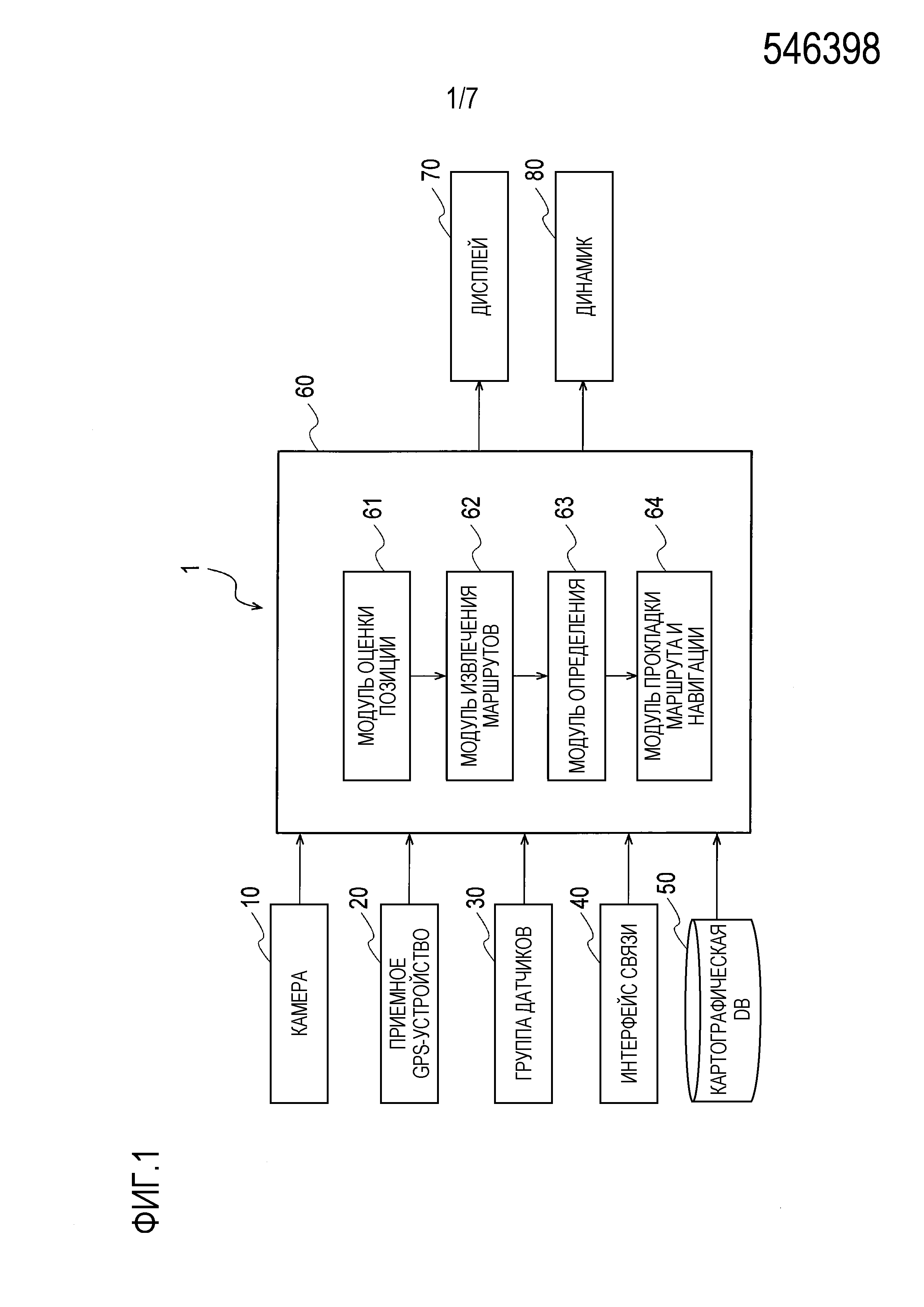
[0008] Фиг. 1 является схемой конфигурации устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
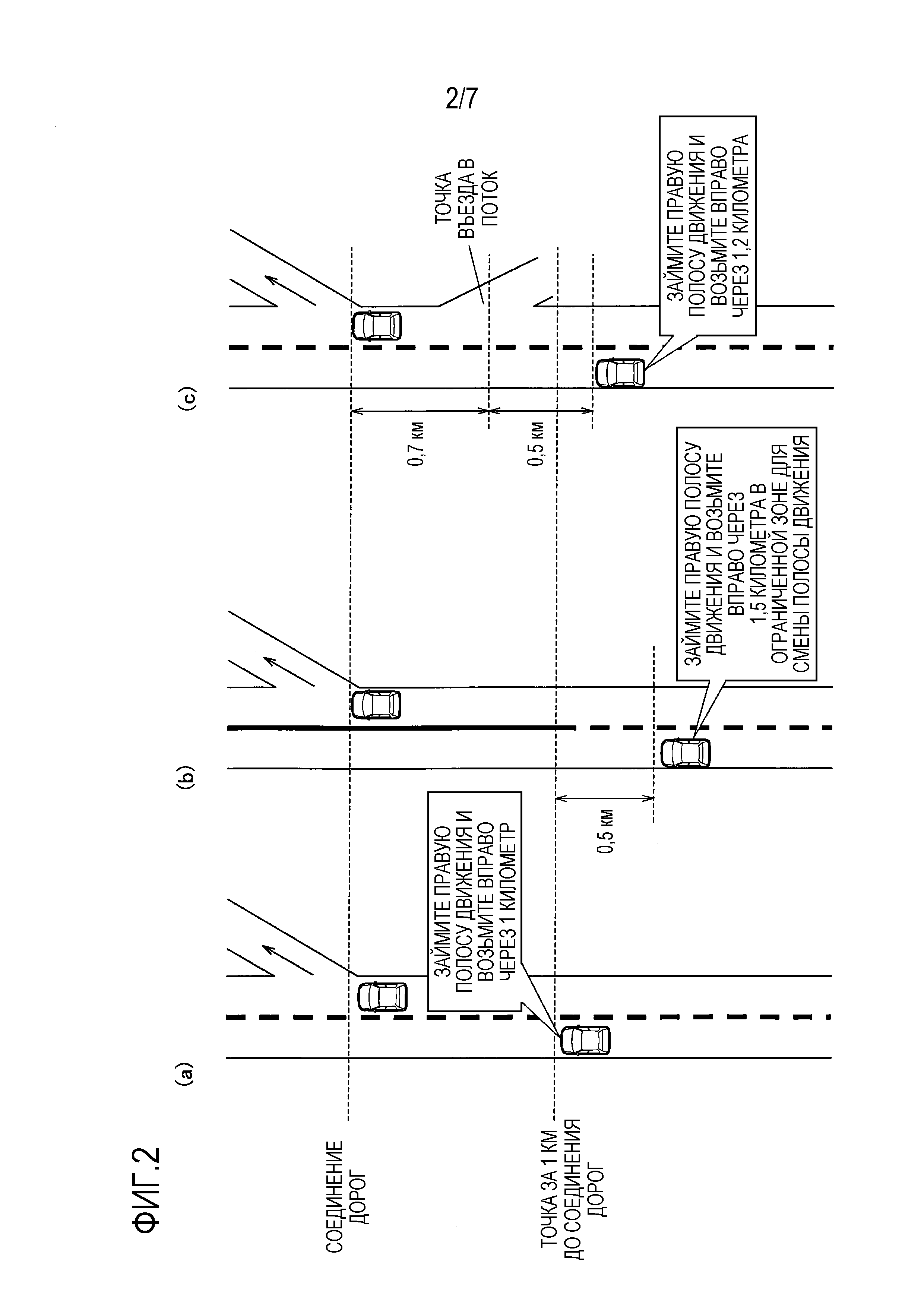
Фиг. 2 является видом для иллюстрации операций устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
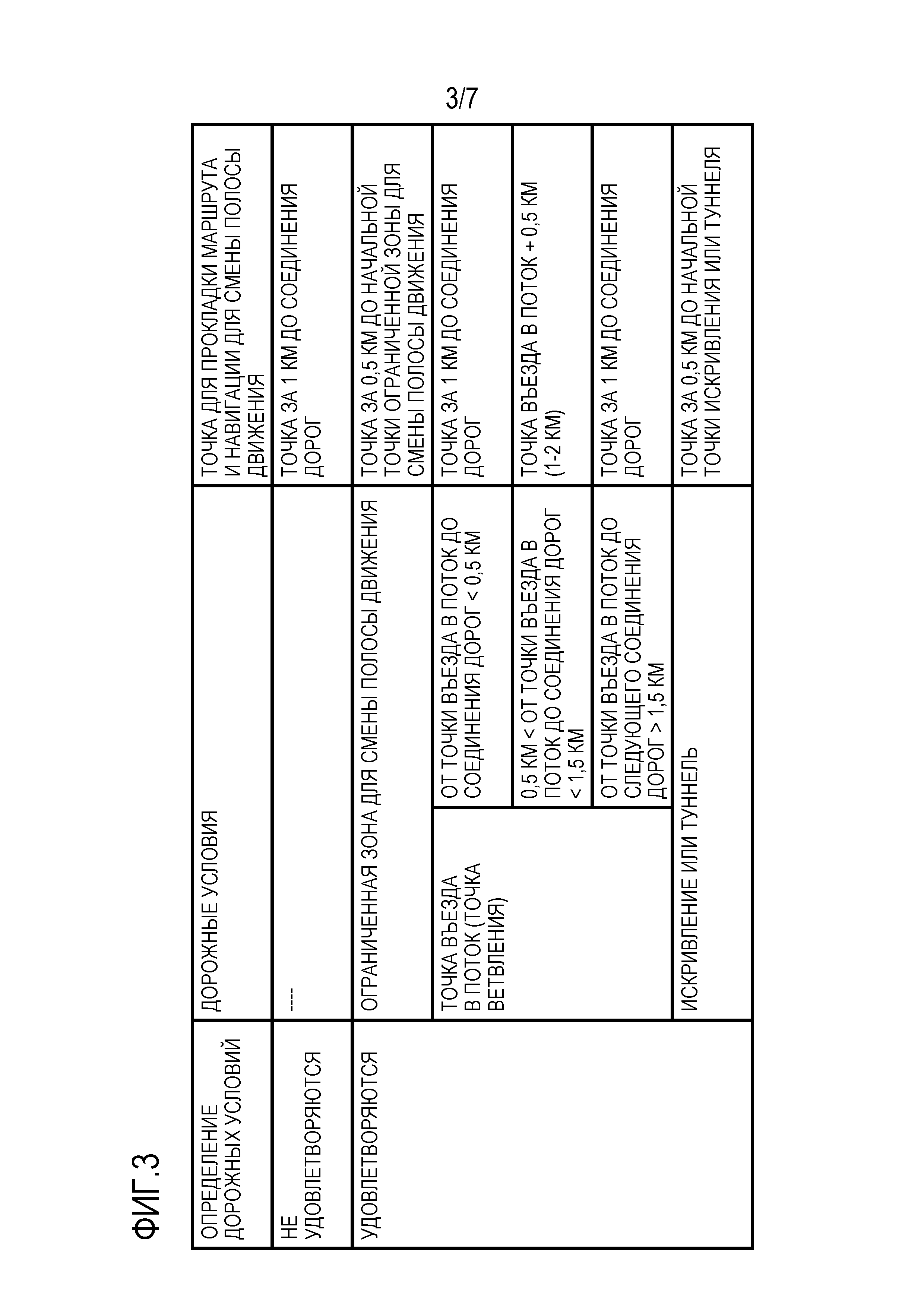
Фиг. 3 является таблицей для иллюстрации операций устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
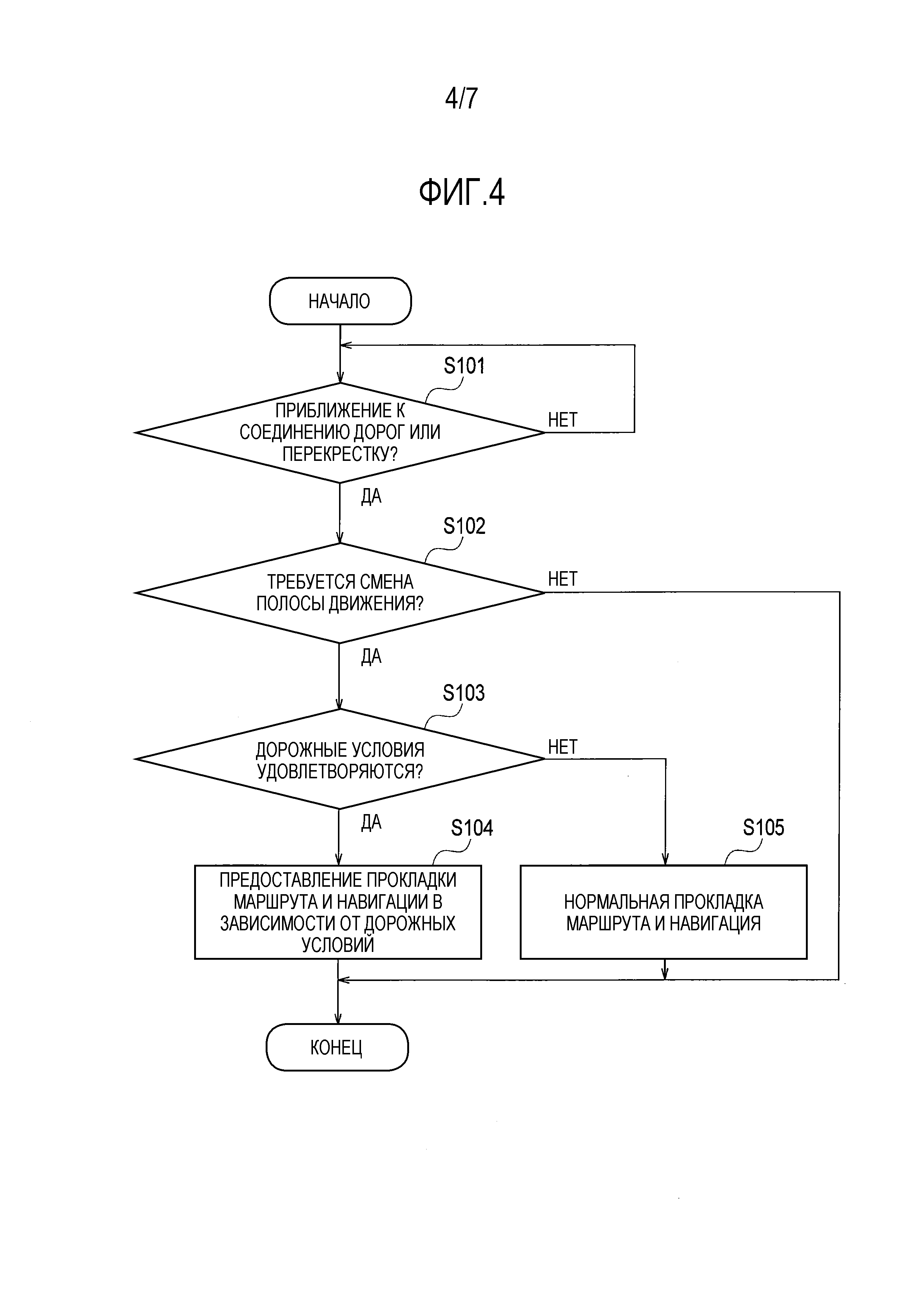
Фиг. 4 является блок-схемой последовательности операций способа для иллюстрации операции устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
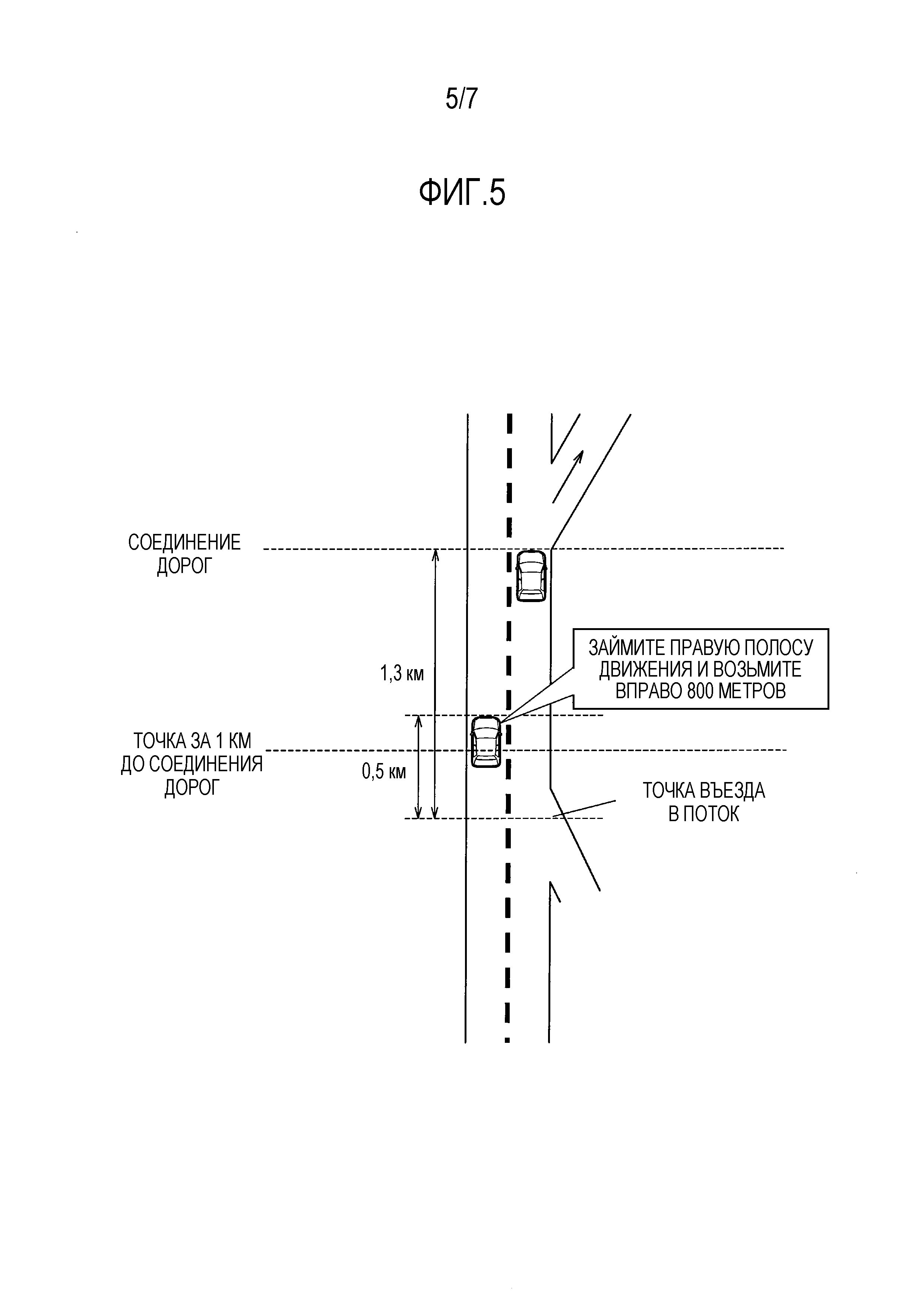
Фиг. 5 является видом для иллюстрации другой операции устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
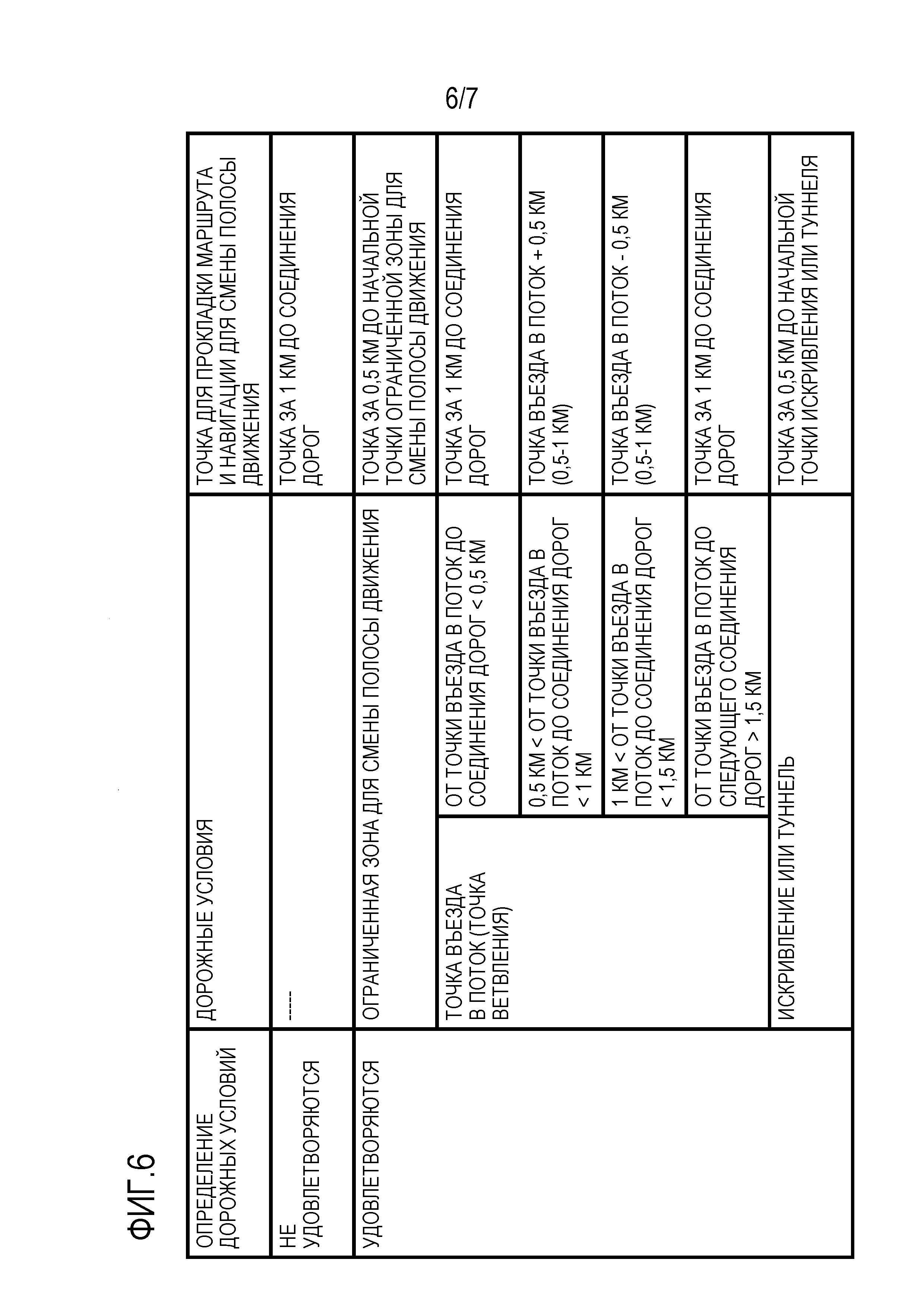
Фиг. 6 является таблицей для иллюстрации другой операции устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
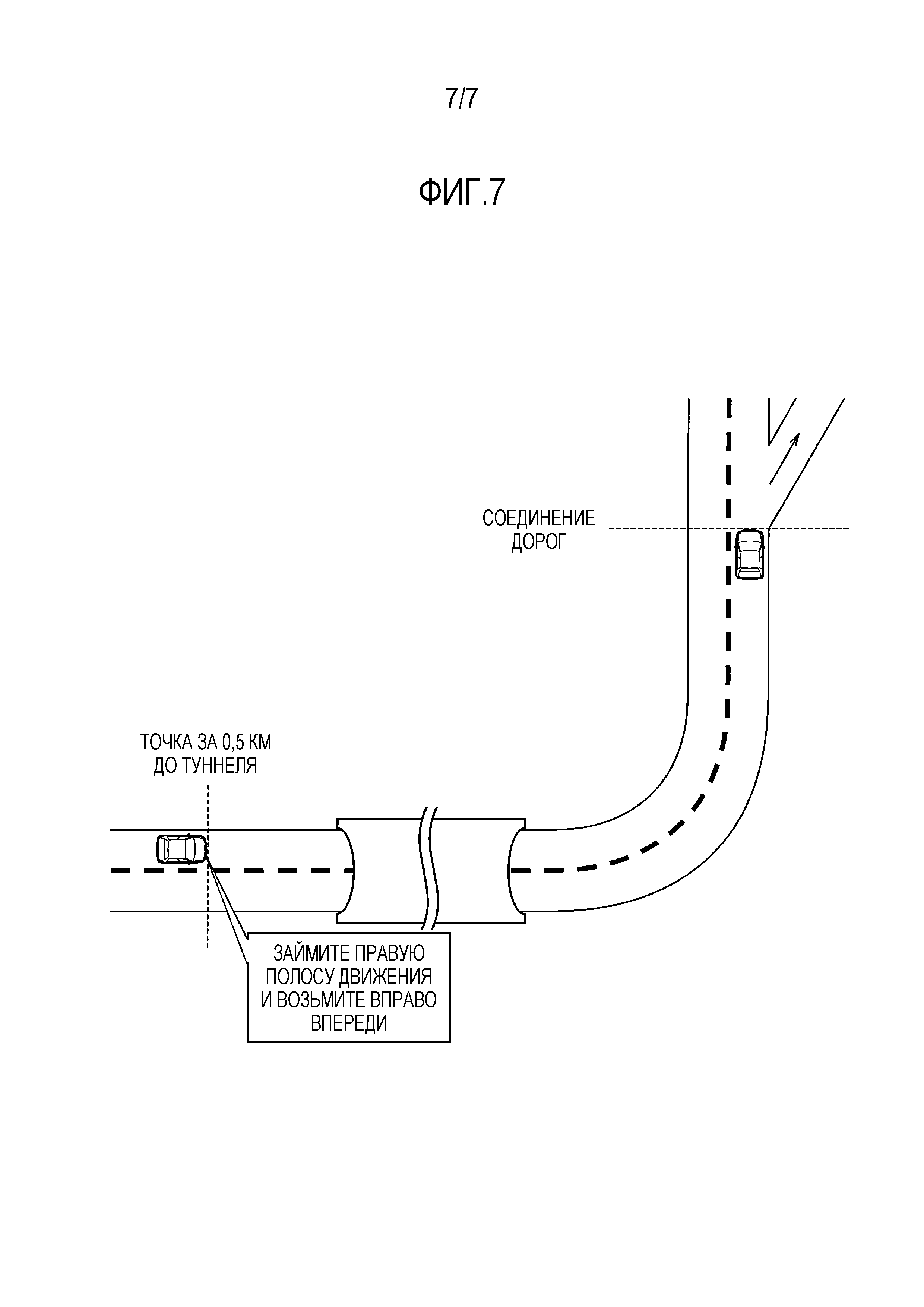
Фиг. 7 является видом для иллюстрации еще одной другой операции устройства прокладки маршрута и навигации по маршруту согласно варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. Идентичные элементы в описаниях чертежей обозначаются посредством идентичных позиционных обозначений, и их пояснения не повторяются ниже.
[0010] Ниже описывается устройство 1 прокладки маршрута и навигации по маршруту согласно настоящему варианту осуществления со ссылкой на фиг. 1. Как показано на фиг. 1, устройство 1 прокладки маршрута и навигации по маршруту включает в себя камеру 10, приемное GPS-устройство 20, группу 30 датчиков, интерфейс 40 связи, картографическую базу 50 данных, навигационное устройство 60, дисплей 70, который предоставляет человеку, занимающему место в транспортном средстве, различные части информации, и динамик 80, который выводит речевые звуки, чтобы информировать человека, занимающего место в транспортном средстве, в отношении информации.
[0011] Камера 10 (модуль обнаружения) представляет собой камеру, включающую в себя устройство формирования изображений, такое как прибор с зарядовой связью (CCD) и комплементарная структура "металл-оксид-полупроводник" (CMOS), и формирует изображения видов впереди рассматриваемого транспортного средства. Камера 10 имеет функцию обработки изображений и обнаруживает объекты, такие как сигнальные линии дорожной разметки из захваченных изображений. Камера 10 выводит обнаруженные данные в навигационное устройство 60. Камера 10 может устанавливаться в позиции, в которой могут захватываться периферийные виды, вместо видов спереди.
[0012] Приемное GPS-устройство 20 (модуль обнаружения) принимает радиоволны из спутника таким образом, чтобы обнаруживать текущую позицию рассматриваемого транспортного средства на земле. Приемное GPS-устройство 20 выводит обнаруженную текущую позицию рассматриваемого транспортного средства в навигационное устройство 60.
[0013] Группа 30 датчиков включает в себя датчик скорости, датчик ускорения и гиродатчик. Группа 30 датчиков обнаруживает скорость, темп ускорения и ориентацию рассматриваемого транспортного средства посредством надлежащих датчиков и выводит обнаруженные данные в навигационное устройство 60.
[0014] Интерфейс 40 связи представляет собой устройство связи, которое обменивается в беспроводном режиме сигналами с внешними устройствами. Интерфейс 40 связи внешне принимает различные части информации, к примеру, информацию дорожного движения, включающую в себя затор в движении и ограничения движения, и информацию о погоде, через интеллектуальную транспортную систему (ITS), которая передает различные данные в реальном времени. ITS включает в себя систему автомобильной информации и связи (VICS: зарегистрированный товарный знак и телематику. Интерфейс 40 связи выводит принимаемую информацию в навигационное устройство 60.
[0015] Картографическая база 50 данных сохраняет картографическую информацию, включающую в себя информацию дороги и информацию инфраструктурных объектов. Картографическая база 50 данных сохраняет различные виды данных, требуемых для прокладки маршрута и навигации по маршруту, таких как данные дорог и данные значков, указываемые на карте. Данные дорог, сохраненные в картографической базе 50 данных, включают в себя информацию относительно числа полос движения дорог, ширин дорог, неровностей дорог и т.п.
[0016] Навигационное устройство 60 определяет маршрут движения в пункт назначения, предварительно заданный человеком. занимающим место в транспортном средстве. В частности, навигационное устройство 60 указывает маршрут движения в пункт назначения на дисплее 70 либо метку, обозначающую текущую позицию рассматриваемого транспортного средства, извлеченную посредством использования позиционной информации, полученной из приемного GPS-устройства 20, информации, полученной из интерфейса 40 связи, картографической информации, полученной из картографической базы 50 данных, и т.п.
[0017] Навигационное устройство 60 представляет собой компьютер, включающий в себя CPU, ROM и RAM и тракт передачи данных и интерфейс ввода-вывода, соединяющий эти элементы. CPU реализует предварительно определенную обработку в соответствии с программами, сохраненными в ROM. Навигационное устройство 60 функционально включает в себя модуль 61 оценки позиции, модуль 62 извлечения маршрутов, модуль 63 определения и модуль 64 прокладки маршрута и навигации.
[0018] Модуль 61 оценки позиции оценивает текущую позицию рассматриваемого транспортного средства в расчете на полосу движения. В частности, модуль 61 оценки позиции оценивает текущую позицию рассматриваемого транспортного средства в расчете на полосу движения посредством использования информации относительно сигнальных линий дорожной разметки, полученной из камеры 10, позиционной информации, полученной из приемного GPS-устройства 20, и картографической информации, полученной из картографической базы 50 данных.
[0019] Модуль 62 извлечения маршрутов извлекает в расчете на полосу движения маршрут движения в пункт назначения, начинающийся с текущей позиции рассматриваемого транспортного средства, оцененной посредством модуля 61 оценки позиции посредством использования картографической информации, сохраненной в картографической базе 50 данных. Модуль 62 извлечения маршрутов может извлекать маршрут движения в расчете на полосу движения с регулярными интервалами, поскольку нагрузка по извлечению увеличивается, когда маршрут движения в пункт назначения извлекается в расчете на полосу движения постоянно. Например, модуль извлечения 62 может извлекать маршрут движения в расчете на полосу движения, когда расстояние до соединения дорог или перекрестка достигает трех километров. Расстояние не ограничено тремя километрами и может быть любым расстоянием, достаточным для рассматриваемого транспортного средства, чтобы сменять полосу движения заблаговременно. Альтернативно, модуль извлечения 62 может извлекать маршрут движения в расчете на полосу движения на километр. Расстояние не ограничено одним километром, когда нагрузка по извлечению может уменьшаться.
[0020] Модуль 63 определения (модуль определения изменений) определяет то, должно или нет рассматриваемое транспортное средство сменять текущую полосу движения на другую полосу движения таким образом, чтобы двигаться в надлежащем направлении на соединении дорог или на перекрестке. Например, модуль 63 определения определяет то, что рассматриваемому транспортному средству не требуется смена полосы движения, когда рассматриваемое транспортное средство движется по однополосной дороге. В случае если рассматриваемое транспортное средство движется по двухполосной дороге, модуль 63 определения определяет то, что рассматриваемому транспортному средству не требуется смена полосы движения, когда рассматриваемое транспортное средство движется на надлежащей стороне, или определяет то, что рассматриваемое транспортное средство должно переехать на другую полосу движения, когда текущая полоса движения не является надлежащей полосой движения, по которой должно двигаться рассматриваемое транспортное средство. Модуль 63 определения за счет этого определяет то, что рассматриваемое транспортное средство должно сменять полосу движения, когда имеется две или более полос движения, и рассматриваемое транспортное средство не находится в надлежащей полосе движения для движения.
[0021] Хотя время, когда модуль 63 определения определяет то, следует или нет сменять полосу движения, не ограничено конкретным образом, модуль 63 определения может определять то, следует или нет сменять полосу движения, когда расстояние от текущей позиции рассматриваемого транспортного средства до соединения дорог или перекрестка составляет предварительно определенное расстояние (например, три километра) или меньше.
[0022] Модуль 63 определения (модуль определения дорог) определяет то, удовлетворяет либо нет дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог или перекрестком предварительно определенным дорожным условиям. Примеры дорожных условий включают в себя ограниченную зону для смены полосы движения, точку въезда в поток, точку разветвления, искривление и туннель.
[0023] Модуль 64 прокладки маршрута и навигации предоставляет прокладку маршрута и навигацию для движения в точке разветвления или на перекрестке на маршруте движения. Например, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство в надлежащую полосу движения в точке разветвления, в которой дорога разветвляется на два направления, или направляет рассматриваемое транспортное средство таким образом, что оно едет прямо, поворачивает налево или поворачивает направо на перекрестке.
[0024] Дисплей 70 указывает маршрут движения в пункт назначения, заданный посредством навигационного устройства 60.
[0025] Динамик 80 выводит речевые звуки, чтобы информировать человека, занимающего место в транспортном средстве, в отношении направления в пункт назначения по маршруту движения или направления на соединении дорог или на перекрестке.
[0026] Далее описываются примеры операций устройства 1 прокладки маршрута и навигации по маршруту, сконфигурированного так, как описано выше, со ссылкой на фиг. 2 и фиг. 3. Фиг. 2(a)-2(c) проиллюстрированы для случая, в котором полоса движения дороги, разветвляющейся в направлении вправо, задается в качестве маршрута движения.
[0027] Ниже описывается пример операции в случае, если дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог не удовлетворяет дорожным условиям, со ссылкой на фиг. 2(a) и фиг. 3.
[0028] Как показано на фиг. 2(a), когда рассматриваемое транспортное средство приближается к соединению дорог, модуль 62 извлечения маршрутов извлекает маршрут движения в расчете на полосу движения. Модуль 63 определения затем определяет то, должно или нет рассматриваемое транспортное средство сменять полосу движения таким образом, чтобы двигаться в направлении вправо на соединении дорог. Как показано на фиг. 2(a), когда рассматриваемое транспортное средство движется в левой полосе движения и должно сменять полосу движения для движения в направлении вправо на соединении дорог, модуль 63 определения определяет то, удовлетворяет либо нет дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог дорожным условиям, как показано на фиг. 3. Когда дорога не удовлетворяет дорожным условиям, и расстояние от текущей позиции до соединения дорог достигает предварительно определенного расстояния (например, один километр), модуль 64 прокладки маршрута и навигации информирует водителя "Займите правую полосу движения и возьмите вправо через один километр". Настоящий вариант осуществления примерно иллюстрирует случай, в качестве нормальной прокладки маршрута и навигации, в котором смена полосы движения информируется, когда расстояние от текущей позиции до соединения дорог достигает одного километра. Предварительно определенное расстояние не ограничено одним километром и может быть любым расстоянием, которое является достаточным для водителя, чтобы безопасно сменять полосу движения.
[0029] Ниже описывается пример операции в случае, если дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог удовлетворяет дорожным условиям, со ссылкой на фиг. 2(b) и фиг. 3.
[0030] Как показано на фиг. 2(b), когда рассматриваемое транспортное средство приближается к соединению дорог, модуль 62 извлечения маршрутов извлекает маршрут движения в расчете на полосу движения, как и в случае фиг. 2(a). Модуль 63 определения затем определяет то, должно или нет рассматриваемое транспортное средство сменять полосу движения таким образом, чтобы двигаться в направлении вправо на соединении дорог. Как показано на фиг. 2(b), когда рассматриваемое транспортное средство движется в левой полосе движения и должно сменять полосу движения для движения в направлении вправо на соединении дорог, модуль 63 определения определяет то, удовлетворяет либо нет дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог дорожным условиям, как показано на фиг. 3. Когда часть дороги между текущей позицией и соединением дорог соответствует ограниченной зоне для смены полосы движения, как показано на фиг. 2(b), более конкретно, когда дорога между точкой за один километр до соединения дорог, в которой нормальная прокладка маршрута и навигация начинается, как проиллюстрировано на фиг. 2(a), и соединением дорог соответствует ограниченной зоне для смены полосы движения, и если нормальная прокладка маршрута и навигация предоставляется в точке за один километр до соединения дорог, чтобы информировать в отношении смены полосы движения, рассматриваемое транспортное средство пропускает движение в надлежащем направлении, поскольку водитель не может сменять полосу движения в ограниченной зоне для смены полосы движения.
[0031] Чтобы разрешать такую проблему, модуль 64 прокладки маршрута и навигации информирует водителя "Займите правую полосу движения и возьмите вправо через 1,5 километра в ограниченной зоне для смены полосы движения", как показано на фиг. 2(b). А именно, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в точке за 0,5 километров до начальной точки ограниченной зоны для смены полосы движения. Когда часть дороги между текущей позицией и соединением дорог соответствует ограниченной зоне для смены полосы движения, как описано выше, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения перед начальной точкой ограниченной зоны для смены полосы движения, так что может исключаться риск того, что водитель пропускает движение в надлежащем направлении. Точка за 0,5 километров до начальной точки ограниченной зоны для смены полосы движения, как проиллюстрировано на фиг. 2(b), может изменяться надлежащим образом.
[0032] Ниже описывается другой пример операции в случае, если дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог удовлетворяет дорожным условиям, со ссылкой на фиг. 2(c) и фиг. 3.
[0033] Как показано на фиг. 2(c), когда рассматриваемое транспортное средство приближается к соединению дорог, модуль 62 извлечения маршрутов извлекает маршрут движения в расчете на полосу движения, как и в случае фиг. 2(a). Модуль 63 определения затем определяет то, должно или нет рассматриваемое транспортное средство сменять полосу движения таким образом, чтобы двигаться в направлении вправо на соединении дорог. Как показано на фиг. 2(c), когда рассматриваемое транспортное средство движется в левой полосе движения и должно сменять полосу движения для движения в направлении вправо на соединении дорог, модуль 63 определения определяет то, удовлетворяет либо нет дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог дорожным условиям, как показано на фиг. 3. Когда имеется точка въезда в поток между текущей позицией и соединением дорог, как показано на фиг. 2(c), более конкретно, когда точка въезда в поток расположена в точке за 0,7 километров до соединения дорог, возрастает риск того, что рассматриваемое транспортное средство сталкивается с въезжающим в поток транспортным средством, въезжающим через точку въезда в поток, если нормальная прокладка маршрута и навигация предоставляется, чтобы информировать в отношении смены полосы движения в точке за один километр до соединения дорог.
[0034] Чтобы разрешать такую проблему, когда расстояние от точки въезда в поток до соединения дорог больше 0,5 километров и меньше 1,5 километров, и рассматриваемое транспортное средство достигает точки за 0,5 километров до точки въезда в поток, а именно, достигает точки за 1,2 километра до соединения дорог, как показано на фиг. 2(c) и фиг. 3, модуль 64 прокладки маршрута и навигации информирует водителя "Займите правую полосу движения и возьмите вправо через 1,2 километра". Модуль 64 прокладки маршрута и навигации может направлять рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в точке за один-два километра до соединения дорог, с тем чтобы информировать водителя в отношении надлежащей точки для смены полосы движения, с тем чтобы двигаться в направлении вправо на соединении дорог. Поскольку водитель может сменять полосу движения в точке за 0,5 километров до точки въезда в поток, и расстояние до точки въезда в поток после смены полосы движения больше, чем в случае нормальной прокладки маршрута и навигации, может уменьшаться риск столкновения с въезжающим в поток транспортным средством, въезжающим через точку въезда в поток. Пример, показанный на фиг. 2(c), проиллюстрирован для случая точки въезда в поток, но также может быть применимым к случаю точки разветвления.
[0035] Как показано на фиг. 3, когда расстояние между точкой въезда в поток и соединением дорог меньше 0,5 километров, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в точке за один километр до соединения дорог, как и в случае нормальной прокладки маршрута и навигации, показанной на фиг. 2(a). Модуль 64 прокладки маршрута и навигации за счет этого может информировать водителя в отношении надлежащей точки для смены полосы движения таким образом, чтобы двигаться в направлении вправо на соединении дорог. Поскольку расстояние от точки за один километр до соединения дорог до точки въезда в поток составляет 0,5 километров или более, водитель может исключать риск столкновения с въезжающим в поток транспортным средством, въезжающим через точку въезда в поток.
[0036] Как показано на фиг. 3, когда расстояние от точки въезда в поток до соединения дорог больше 1,5 километров, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в точке за один километр до соединения дорог, как и в случае нормальной прокладки маршрута и навигации, показанной на фиг. 2(a). Модуль 64 прокладки маршрута и навигации за счет этого может информировать водителя в отношении надлежащей точки для смены полосы движения таким образом, чтобы двигаться в направлении вправо на соединении дорог. Поскольку расстояние между точкой за один километр до соединения дорог и точкой въезда в поток составляет 0,5 километров или более, водитель может сменять полосу движения более за 0,5 километра перед точкой въезда в поток таким образом, чтобы исключать риск столкновения с въезжающим в поток транспортным средством.
[0037] Как показано на фиг. 3, когда имеется искривление или туннель на дороге между текущей позицией рассматриваемого транспортного средства и соединением дорог, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в точке за 0,5 километров до начальной точки искривления или туннеля. Модуль 64 прокладки маршрута и навигации исключает направление рассматриваемого транспортного средства таким образом, чтобы сменять полосу движения на искривлении или в туннеле, в котором не надлежит сменять полосу полосы движения таким образом, чтобы снижать риск при смене полосы движения.
[0038] Далее описывается пример операции устройства 1 прокладки маршрута и навигации по маршруту согласно настоящему варианту осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 4. Процесс, показанный на блок-схеме последовательности операций способа, начинается, когда задается маршрут движения в пункт назначения.
[0039] На этапе S101, модуль 63 определения определяет то, приближается или нет рассматриваемое транспортное средство к соединению дорог или перекрестку. Когда рассматриваемое транспортное средство приближается к соединению дорог или перекрестку ("Да" на этапе S101), процесс переходит к этапу S102. Когда рассматриваемое транспортное средство по-прежнему находится на большом расстоянии от соединения дорог или перекрестка ("Нет" на этапе S101), процесс находится в режиме ожидания.
[0040] На этапе S102, модуль 63 определения определяет то, должно или нет рассматриваемое транспортное средство сменять текущую полосу движения на другую полосу движения таким образом, чтобы двигаться в надлежащем направлении на соединении дорог или на перекрестке. Когда рассматриваемое транспортное средство должно сменять полосу движения ("Да" на этапе S102), процесс переходит к этапу S103. Когда рассматриваемому транспортному средству не требуется смена полосы движения ("Нет" на этапе S102), процесс завершается.
[0041] На этапе S103, модуль 63 определения определяет то, удовлетворяет либо нет дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог или перекрестком дорожным условиям. Когда дорога удовлетворяет дорожным условиям ("Да" на этапе S103), процесс переходит к этапу S104. Когда дорога не удовлетворяет дорожным условиям ("Нет" на этапе S103), процесс переходит к этапу S105.
[0042] На этапе S104, модуль 64 прокладки маршрута и навигации информирует водителя в отношении точки, подходящей для смены полосы движения при изменении точки в зависимости от дорожных условий.
[0043] На этапе S105, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения, когда расстояние от текущей позиции до соединения дорог или перекрестка достигает предварительно определенного расстояния.
[0044] Фиг. 3 примерно иллюстрирует случай, в котором когда расстояние от точки въезда в поток до соединения дорог больше 0,5 километров и меньше 1,5 километров, модуль 64 прокладки маршрута и навигации направляет рассматриваемое транспортное средство таким образом, что оно сменяет полосу движения в точке за 0,5 километров до точки въезда в поток; тем не менее, настоящий вариант осуществления не ограничен этим случаем. Например, когда точка въезда в поток расположена в точке за 1,3 километра до соединения дорог, как показано на фиг. 5, и если модуль 64 прокладки маршрута и навигации информирует водителя в отношении смены полосы движения в точке за 0,5 километров до точки въезда в поток, водитель должно сменять полосу движения в точке за 1,8 километров до соединения дорог, что требует от водителя двигаться в правой полосе движения в течение большего времени. Когда правая полоса движения представляет собой полосу обгона, рассматриваемое транспортное средство предпочтительно сменяет полосу движения в точке ближе к соединению дорог, хотя достаточное расстояние должно обеспечиваться для того, чтобы безопасно сменять полосу движения.
[0045] Модуль 64 прокладки маршрута и навигации за счет этого задает минимальное расстояние до соединения дорог равным 0,5 километров и изменяет точку для прокладки маршрута и навигации в зависимости от дорожных условий. Например, как показано на фиг. 5 и фиг. 6, когда расстояние от точки въезда в поток до соединения дорог больше одного километра и меньше 1,5 километров, модуль 64 прокладки маршрута и навигации предоставляет прокладку маршрута и навигацию за 0,5 километра перед точкой въезда в поток, а именно, в точке за 0,8 километра до соединения дорог, чтобы информировать водителя "Займите правую полосу движения и возьмите вправо через 800 метров". Поскольку модуль 64 прокладки маршрута и навигации может информировать водителя в отношении смены полосы движения в точке за 0,5 километров - один километр до соединения дорог, чтобы обеспечивать минимальное расстояние до соединения дорог, водитель может сменять полосу движения в надлежащей точке таким образом, чтобы двигаться в направлении вправо на соединении дорог.
[0046] Как показано на фиг. 6, когда расстояние от точки въезда в поток до соединения дорог больше 0,5 километров и меньше одного километра, и если водитель информируется в отношении смены полосы движения за 0,5 километра перед точкой въезда в поток, водитель не может обеспечивать минимальное расстояние до соединения дорог. Модуль 64 прокладки маршрута и навигации за счет этого информирует водителя в отношении смены полосы движения в точке за 0,5 километров до точки въезда в поток в случае, если расстояние от точки для прокладки маршрута и навигации, измененной в зависимости от дорожных условий, до соединения дорог ниже минимального расстояния. Поскольку модуль 64 прокладки маршрута и навигации может информировать водителя в отношении смены полосы движения в точке за один километр - 1,5 километра до соединения дорог, чтобы обеспечивать минимальное расстояние до соединения дорог, водитель может сменять полосу движения в надлежащей точке таким образом, чтобы двигаться в направлении вправо на соединении дорог. Минимальное расстояние до соединения дорог, которое должно обеспечиваться, не ограничено 0,5 километрами и может изменяться надлежащим образом.
[0047] Как описано выше, устройство 1 прокладки маршрута и навигации по маршруту согласно настоящему варианту осуществления позволяет добиваться следующих преимуществ.
[0048] Устройство 1 прокладки маршрута и навигации по маршруту изменяет точку для прокладки маршрута и навигации для смены полосы движения в зависимости от дорожных условий, когда дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог или перекрестком удовлетворяет дорожным условиям. Устройство 1 прокладки маршрута и навигации по маршруту за счет этого может информировать водителя в отношении надлежащей точки для смены полосы движения, которая варьируется в зависимости от дорожных условий.
[0049] Дорожные условия включают в себя ограниченную зону для смены полосы движения, точку въезда в поток, точку разветвления, искривление и туннель. Устройство 1 прокладки маршрута и навигации по маршруту исключает направление рассматриваемого транспортного средства таким образом, чтобы сменять полосу движения на искривлении или в туннеле, в котором не надлежит сменять полосу полосы движения таким образом, чтобы снижать риск при смене полосы движения.
[0050] Устройство 1 прокладки маршрута и навигации по маршруту информирует водителя в отношении смены полосы движения перед точкой, удовлетворяющей дорожным условиям, а именно, перед начальной точкой ограниченной зоны для смены полосы движения, искривления или туннеля, либо перед точкой въезда в поток или точкой разветвления, когда расстояние от точки для прокладки маршрута и навигации, измененной в зависимости от дорожных условий, до соединения дорог меньше минимального расстояния. Соответственно, устройство 1 прокладки маршрута и навигации по маршруту может информировать водителя в отношении точки, подходящей для смены полосы движения таким образом, чтобы двигаться в направлении вправо на соединении дорог при обеспечении минимального расстояния до соединения дорог или перекрестка.
[0051] Хотя выше описан вариант осуществления настоящего изобретения, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию сущности.
[0052] Хотя настоящий вариант осуществления примерно иллюстрирует случай, в котором картографическая база 50 данных сохраняется в устройстве 1 прокладки маршрута и навигации по маршруту, картографическая база 50 данных может сохраняться на сервере. Когда картографическая база 50 данных сохраняется на сервере, навигационное устройство 60 может получать картографическую информацию по требованию через связь.
[0053] Когда дорога между текущей позицией рассматриваемого транспортного средства и соединением дорог удовлетворяет множеству дорожных условий, модуль 64 прокладки маршрута и навигации может изменять точку для прокладки маршрута и навигации, чтобы сменять полосу движения согласно первому дорожному условию непосредственно впереди рассматриваемого транспортного средства. Например, как показано на фиг. 7, когда имеется туннель и искривление на дороге между текущей позицией и соединением дорог, модуль 64 прокладки маршрута и навигации может информировать водителя в отношении смены полосы движения в точке за 0,5 километров до начальной точки туннеля, что представляет собой первое дорожное условие, ближайшее к рассматриваемому транспортному средству. Модуль 64 прокладки маршрута и навигации за счет этого может изменять точку для прокладки маршрута и навигации для смены полосы движения согласно первому дорожному условию, ближайшему к рассматриваемому транспортному средству, с тем чтобы исключать направление рассматриваемого транспортного средства таким образом, чтобы сменять полосу движения на искривлении или в туннеле, в котором не надлежит сменять полосу движения. Соответственно, модуль 64 прокладки маршрута и навигации может снижать риск при смене полосы движения.
[0054] Настоящее изобретение является применимым к автономному транспортному средству, которое управляется в режиме автономного вождения по маршруту движения. Когда настоящее изобретение применяется к автономному транспортному средству, автономное транспортное средство может автономно изменять точку для того, чтобы сменять полосу движения в зависимости от дорожных условий. Соответственно, автономное транспортное средство может сменять полосу движения в надлежащей точке таким образом, чтобы двигаться в надлежащем направлении на соединении дорог или на перекрестке.
Список позиционных обозначений
[0055] 10 - камера
20 - приемное GPS-устройство
63 - модуль определения
64 - модуль прокладки маршрута и навигации
Устройство обнаружения трехмерного объекта и способ обнаружения трехмерного объекта
Активный материал отрицательного электрода для электрического устройства
Узел крепления каркаса ручки
Устройство для блокировки рулевой колонки
Устройство контроля давления воздуха в шинах
Устройство мониторинга давления воздуха в шинах
Ротор вращающейся электрической машины
Способ и система для управления запуском двигателя внутреннего сгорания
Нагревательный модуль
Устройство диагностики аккумулятора транспортного средства
Устройство и способ выдачи инструкций навигации по маршруту

