Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] настоящее изобретение относится к устройству управления для гибридного транспортного средства и способу его управления.
Уровень техники
[0002] в качестве обычного устройства управления для транспортного средства устройство управления управляет нагрузкой источника мощности на основе целевого выходного крутящего момента, определенного посредством вычисления целевой выходной мощности источника мощности на основе целевой движущей силы, вычисления целевой выходной скорости вращения на основе целевой выходной мощности и вычисления целевого выходного крутящего момента источника мощности для достижения целевой движущей силы на основе целевой движущей силы. Устройство управления вычисляет целевую выходную мощность (p2) посредством добавления выходного крутящего момента (paux) для поддержания работы на холостом ходу источника мощности к целевому выходному крутящему моменту (p) и управляет нагрузкой для источника мощности так, что выходной крутящий момент источника приведения в движение должен становиться целевой выходной мощностью (p2). (патентный документ 1)
Документ предшествующего уровня техники
Патентный документ
[0003] патентный документ 1: jp 2001-253270 a
Сущность изобретения
Задачи, которые должны быть решены изобретением
[0004] однако, в устройстве управления, когда работает кондиционер воздуха, крутящий момент, требуемый для работы кондиционера воздуха, добавляется к выходному крутящему моменту источника мощности, линия равной выходной мощности для целевой выходной мощности повышается, и, таким образом, скорость двигателя также становится высокой. По этой причине, существует проблема того, что вращение двигателя колеблется за счет работы кондиционера воздуха.
[0005] задача, которая должна быть решена изобретением, заключается в предоставлении устройства управления, которое может пресекать колебание скорости двигателя вследствие работы кондиционера воздуха.
Средство решения задач
[0006] в настоящем изобретении требуемая выходная мощность вычисляется посредством добавления целевой движущей силы источника приведения в движение к выходной мощности системы, запрашиваемой для источника приведения в движение по запросу системы, и рабочая точка для двигателя вычисляется для оптимального привода двигателя в ответ на требуемую выходную мощность для управления двигателем, чтобы приводить его в действие в рабочей точке. Также, в настоящем изобретении, для того, чтобы решать вышеописанную проблему, когда кондиционер воздуха находится во включенном состоянии, движущая сила, которая соответствует потреблению электрической мощности, потребляемой кондиционером воздуха, вычитается из целевой движущей силы, и требуемая выходная мощность вычисляется посредством добавления выходной мощности двигателя, требуемой, чтобы формировать потребление мощности мотором, к выходной мощности системы.
Преимущества изобретения
[0007] согласно настоящему изобретению, когда кондиционер воздуха приходит во включенное состояние, движущая сила, которая соответствует потреблению электрической мощности, потребляемой кондиционером воздуха, вычитается из целевой движущей силы, и выходная мощность двигателя, которая соответствует вычтенной движущей силе, добавляется к выходной мощности, требуемой для системы, и, таким образом, рабочая точка двигателя значительно не изменяется в зависимости от работы кондиционера воздуха. В результате, колебание скорости двигателя вследствие работы кондиционера воздуха может быть пресечено.
Краткое описание чертежей
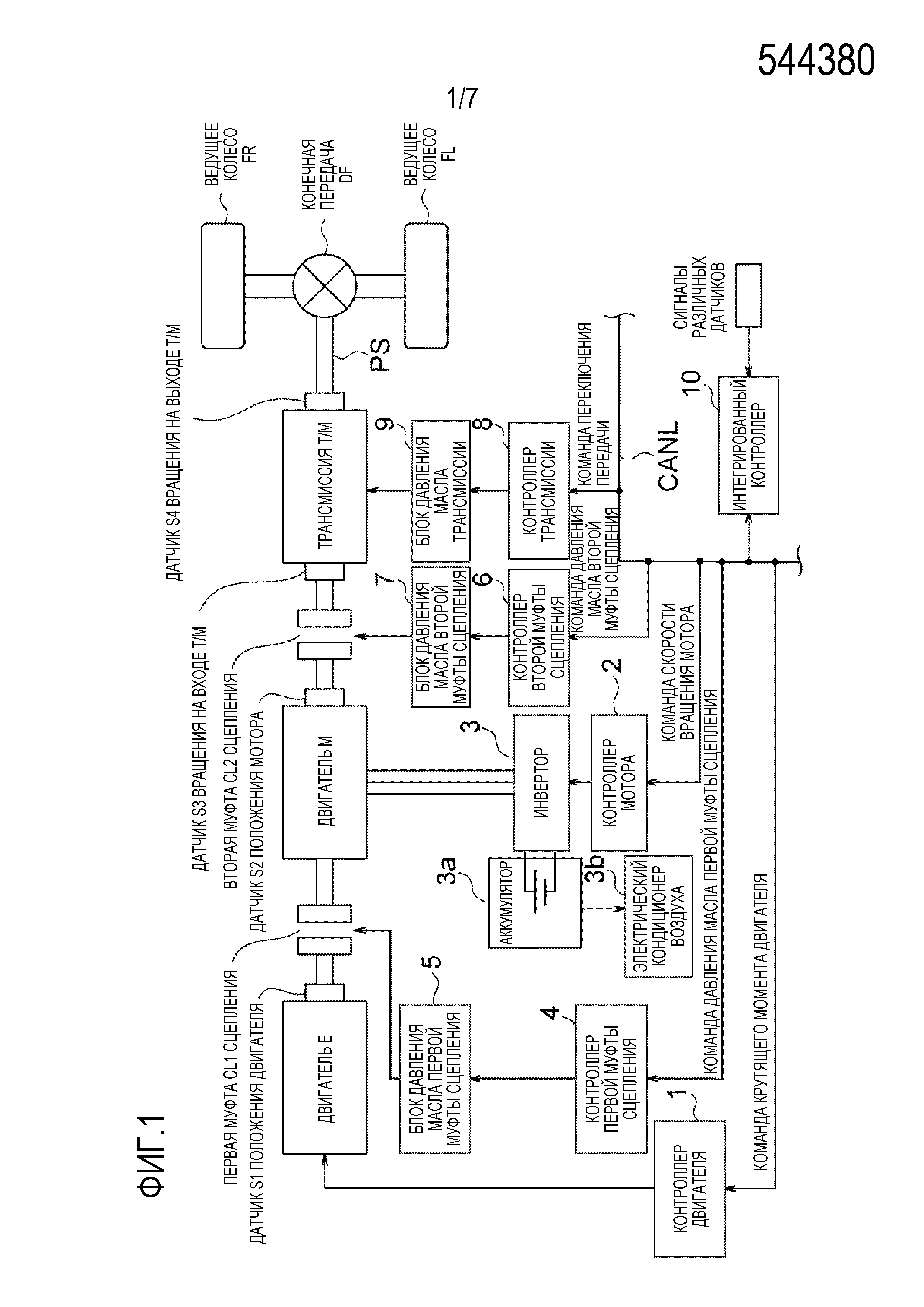
[0008] фиг. 1 - это блок-схема, иллюстрирующая всю конфигурацию гибридного транспортного средства согласно варианту осуществления настоящего изобретения.
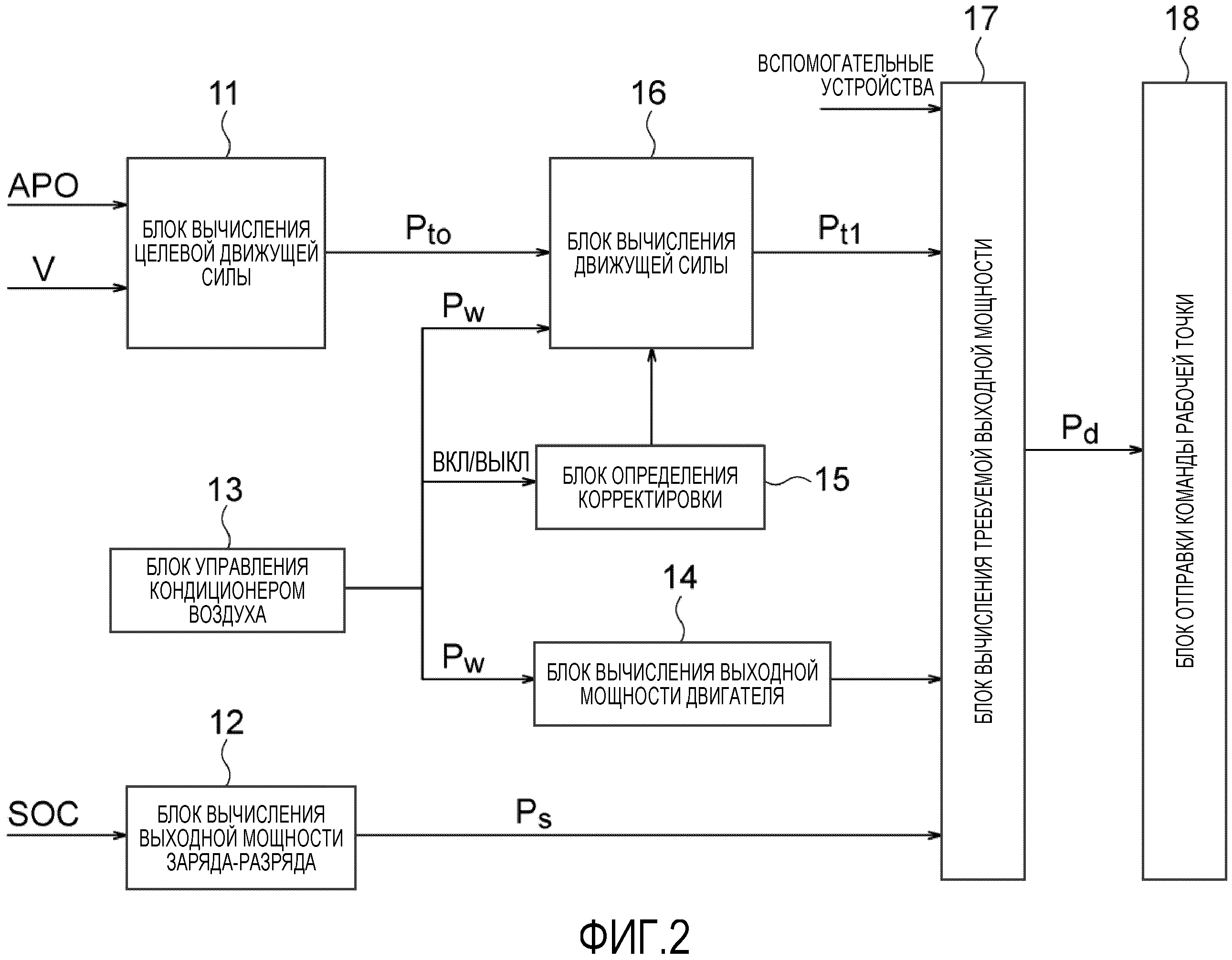
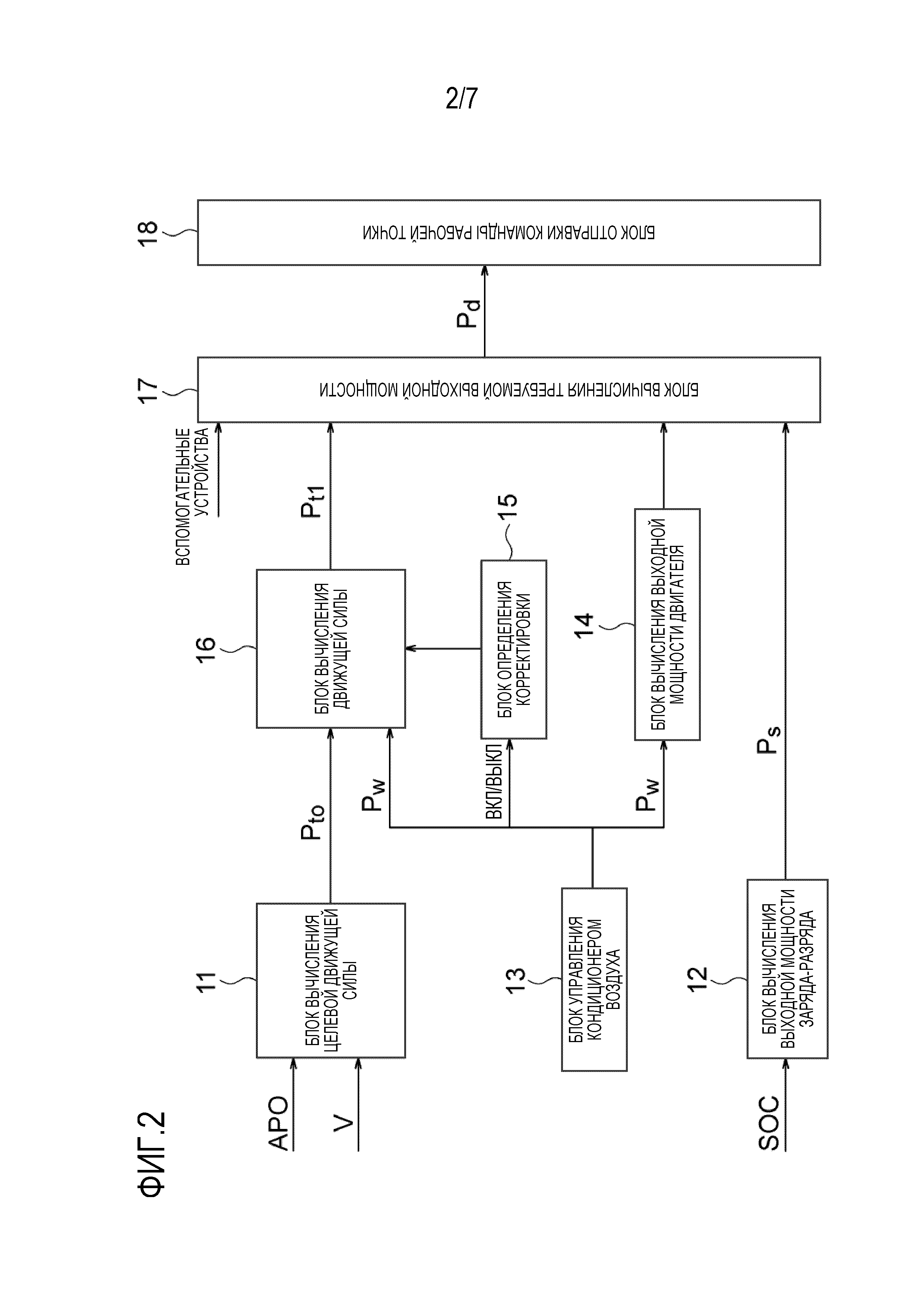
Фиг. 2 - это блок-схема, иллюстрирующая конфигурацию интегрированного контроллера на фиг. 1.
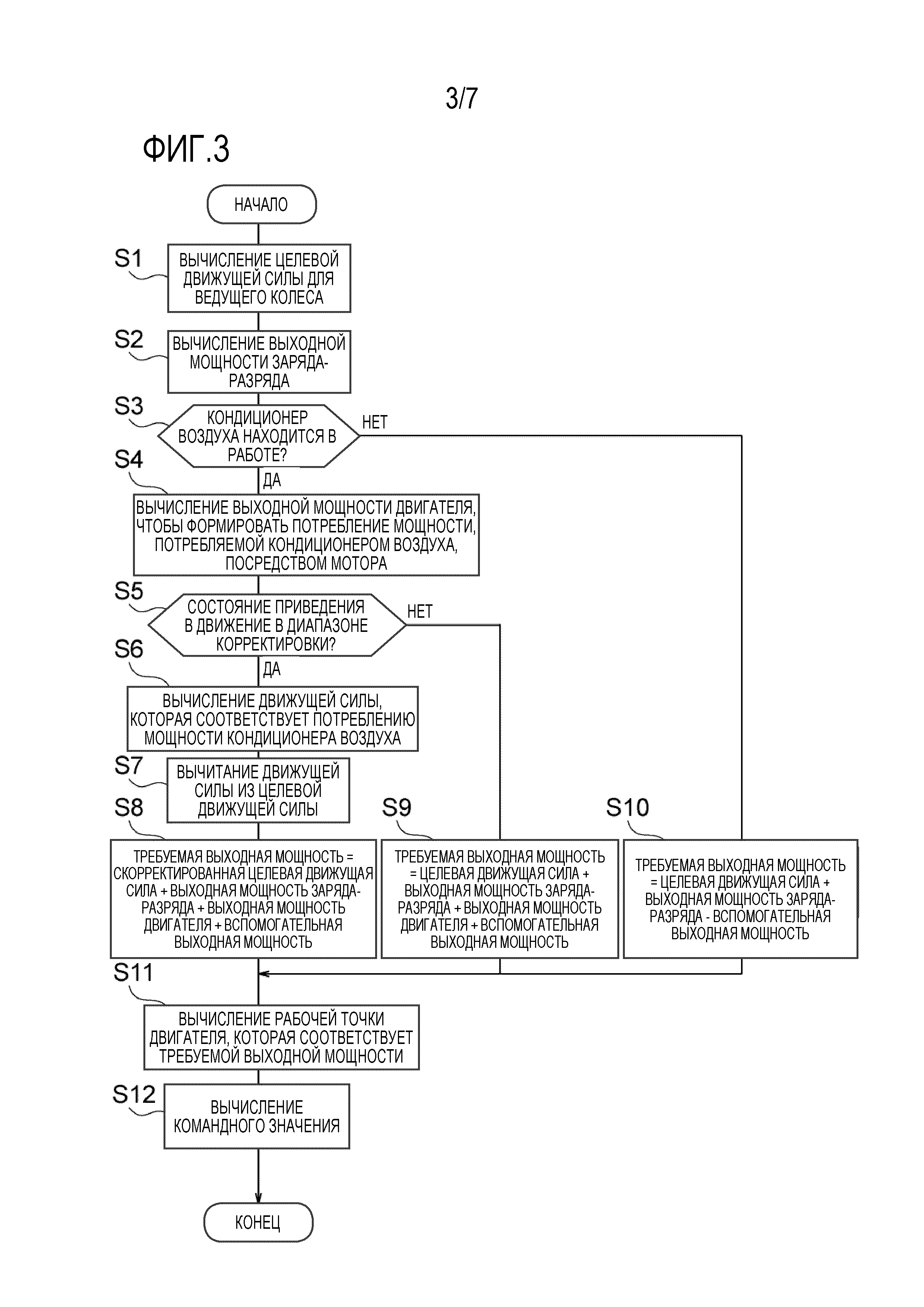
Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая последовательность управления для интегрированного контроллера на фиг. 2.
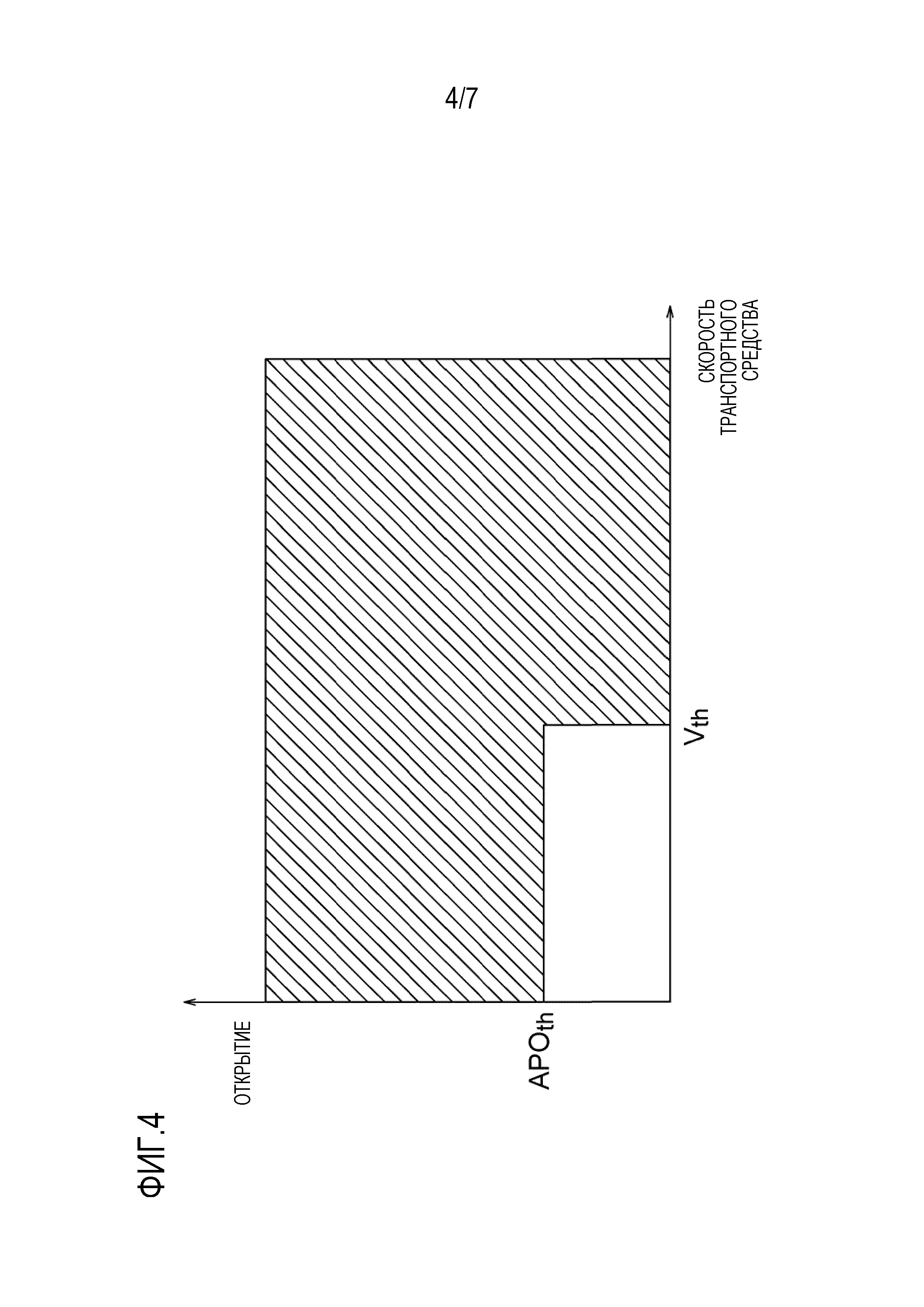
Фиг. 4 - это график, иллюстрирующий диапазон, для которого выполняется корректировка, касающаяся скорости и открытия акселератора транспортного средства.
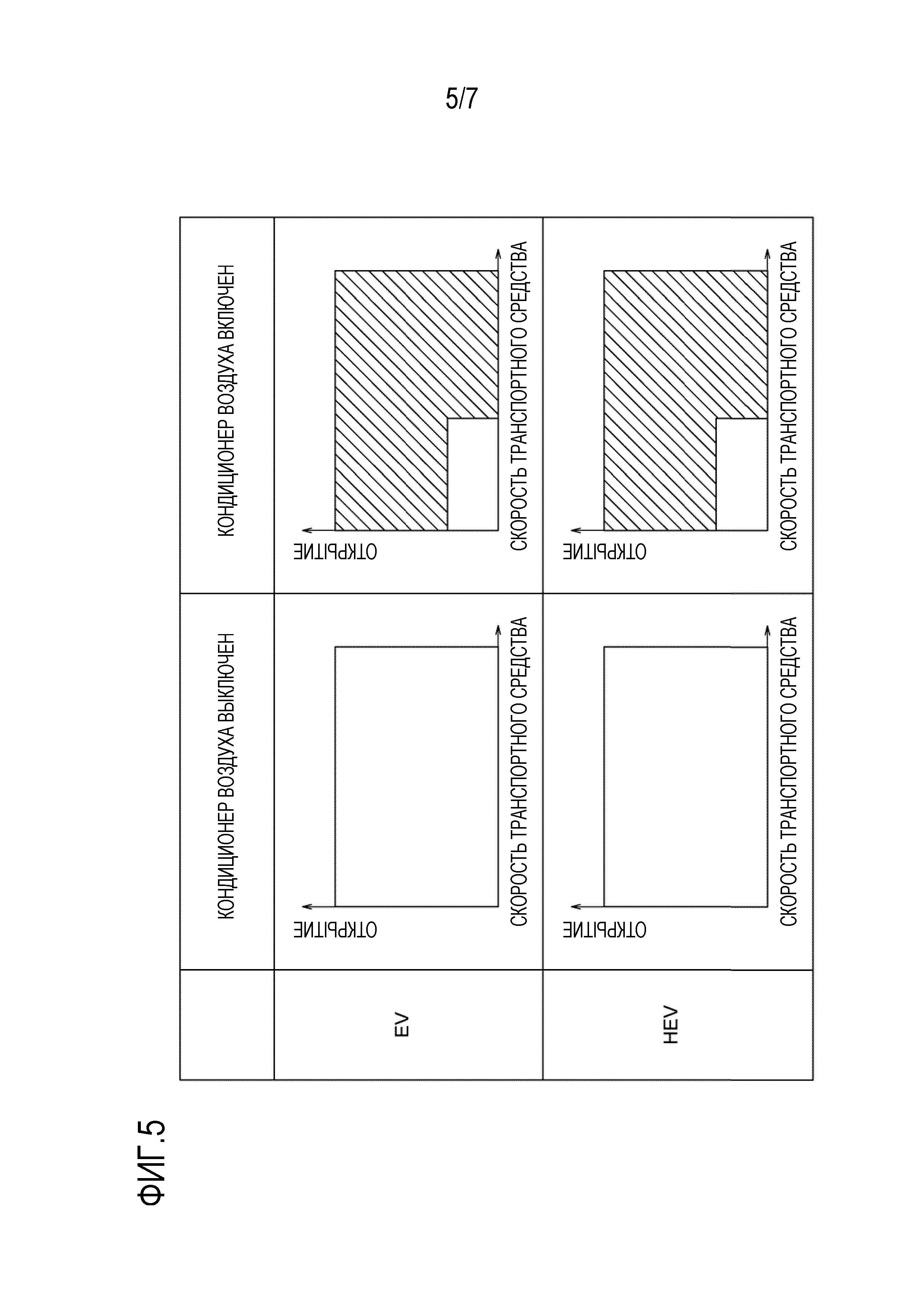
Фиг. 5 - это график, иллюстрирующий диапазон, для которого выполняется корректировка, касающаяся включения/выключения кондиционера воздуха и режима движения транспортного средства.
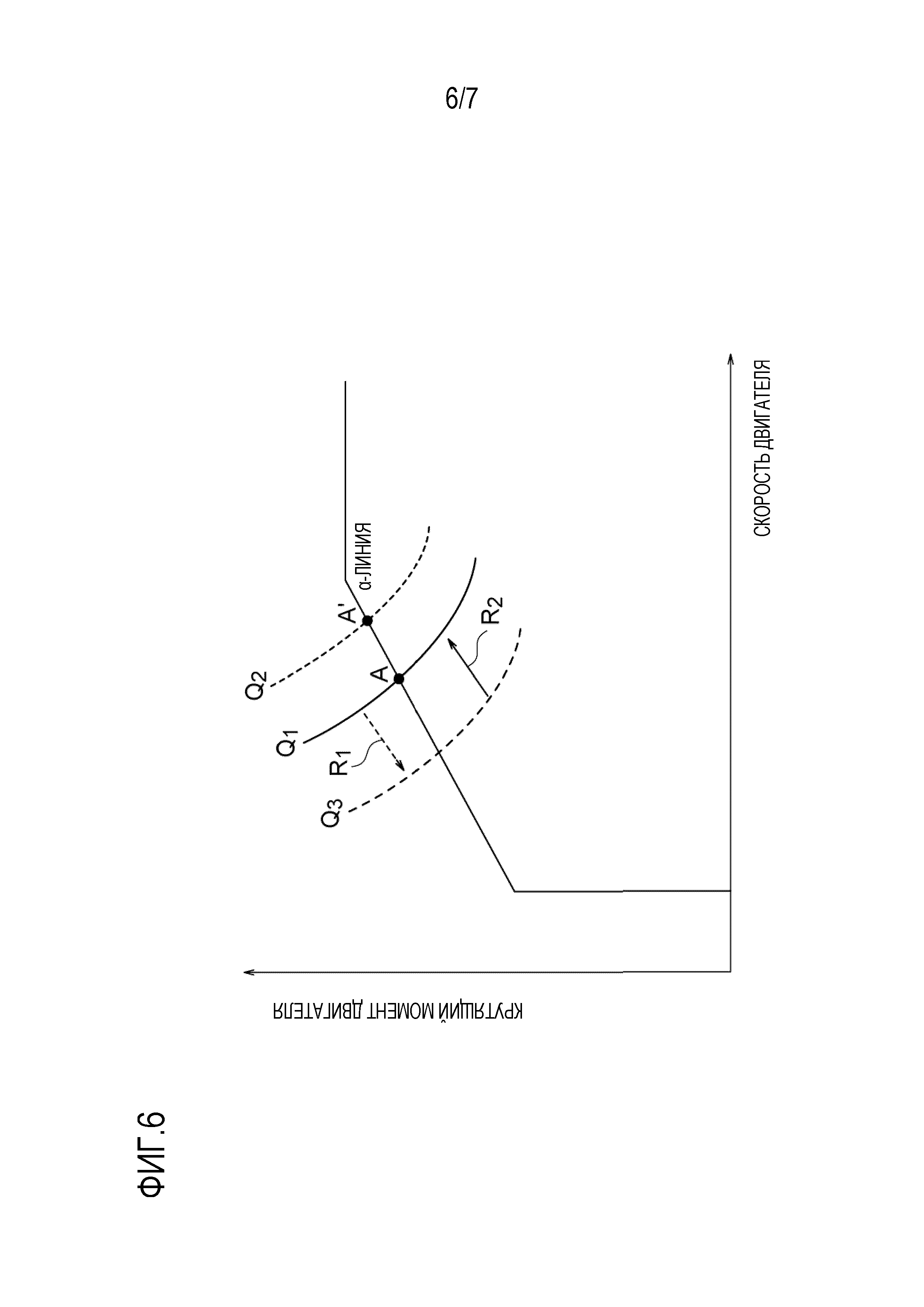
Фиг. 6 - это график, иллюстрирующий линию равной выходной мощности для α-линии и требуемые выходные мощности.
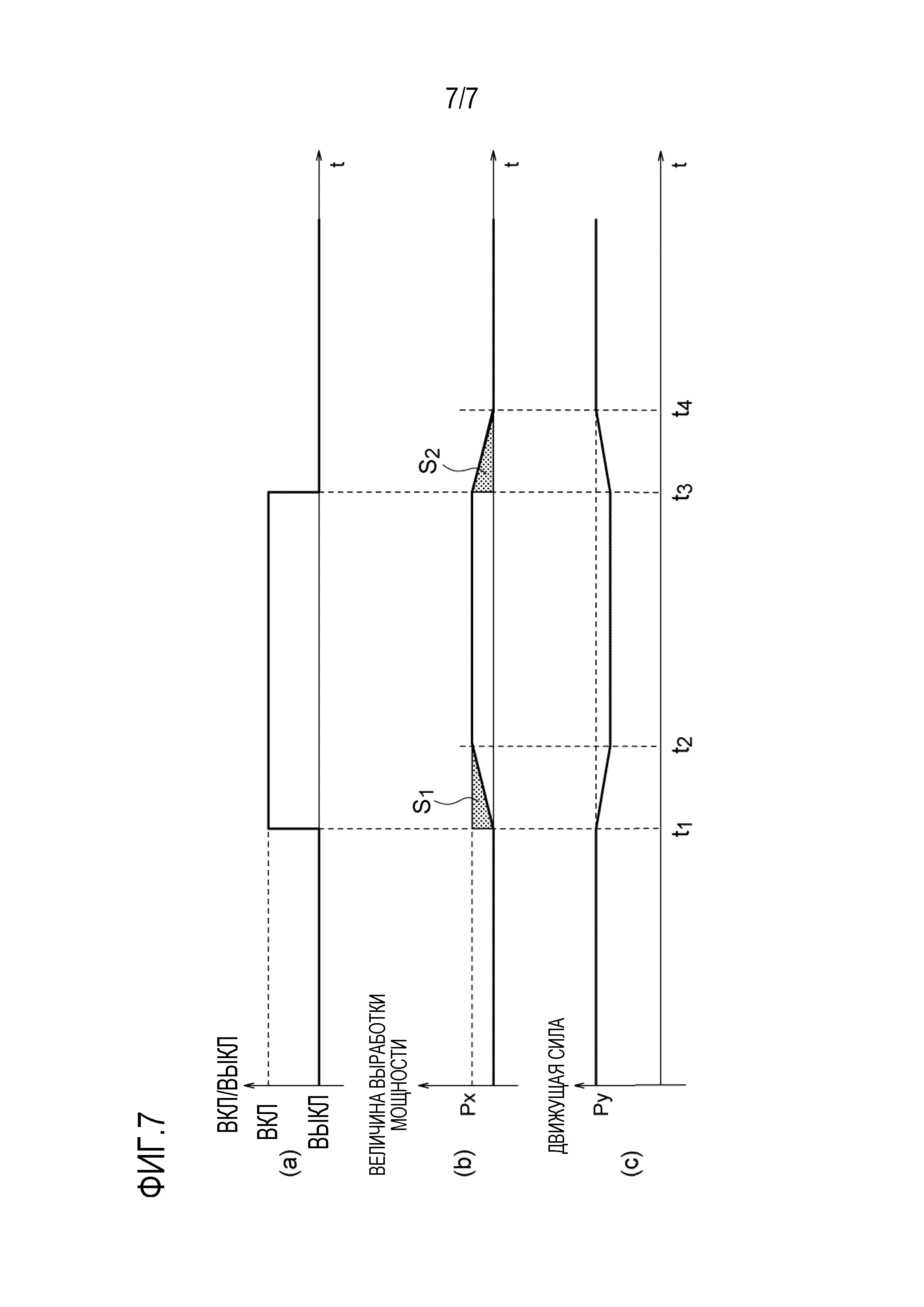
Фиг. 7 - это графики, чтобы описывать временную диаграмму относительно включения/выключения электрического кондиционера воздуха, величины выработки мощности и движущей силы. График (a) -это график, иллюстрирующий характеристики включения/выключения электрического кондиционера воздуха, (b) -это график, иллюстрирующий характеристики величины выработки мощности, и (c) -это график, иллюстрирующий характеристики движущей силы.
Режимы осуществления изобретения
[0009] в последующем, варианты осуществления настоящего изобретения объясняются со ссылкой на чертежи.
[0010] фиг. 1 является блок-схемой, иллюстрирующей всю конфигурацию гибридного транспортного средства, включающего в себя устройство управления для гибридного транспортного средства варианта осуществления. Как показано на фиг. 1, гибридное транспортное средство 100 включает в себя двигатель e, мотор m, первую муфту cl1 сцепления, вторую муфту cl2 сцепления и трансмиссию t/m. Гибридное транспортное средство 100 включает в себя карданный вал ps, конечную передачу (дифференциал) df, левое переднее колесо fl (ведущее колесо) и правое переднее колесо fr (ведущее колесо). Двигатель e и мотор m являются источниками приведения в движение гибридного транспортного средства. Дополнительно, гибридный тип гибридного транспортного средства 100 не ограничивается параллельным типом и может быть последовательным типом.
[0011] двигатель e, например, является бензиновым двигателем или дизельным двигателем и т.д. Двигатель e управляет открытием клапана дроссельной заслонки на основе управляющей команды от контроллера 1 двигателя, описанного ниже. Отметим, что, для выходного вала двигателя e, размещается датчик s1 положения двигателя, который определяет скорость двигателя.
[0012] мотор m является мотором, таким как синхронный мотор-генератор, выполненный посредством вставки постоянного магнита в ротор и намотки катушки статора на ротор. Также, мотор m приводится в действие посредством электрической мощности от аккумулятора 3a. Инвертор 3 возбуждается по команде управления от контроллера 2 мотора, описанного ниже, преобразует электрическую мощность от аккумулятора 3a и выводит трехфазную ac-мощность к мотору m.
[0013] ротор (выходной вал) мотора соединяется с входным валом трансмиссии t/m через вторую муфту cl2 сцепления. Соответственно, мотор m работает как электрический мотор для приведения во вращение приводных колес fl и fr при приеме электрической мощности, подаваемой от инвертора 3. Кроме того, когда ротор вращается посредством внешнего усилия во время торможения, мотор m функционирует как генератор энергии (генератор), чтобы формировать электродвижущую силу для обоих концов катушки статора, и заряжает аккумулятор 3a (рекуперация). Для выходного вала мотора m датчик s2 положения мотора размещается для определения скорости вращения мотора.
[0014] электрический кондиционер 3b воздуха приводится в действие посредством электрической мощности от аккумулятора 3a. Компрессор электрического кондиционера 3b воздуха не соединяется с двигателем с помощью ремня как в бензиновом транспортном средстве, который имеет лишь двигатель в качестве источника приведения в движение, но использует аккумулятор 3b в качестве своего источника мощности. Дополнительно, что касается электрического кондиционера 3b воздуха, не только компрессор, но также другие компоненты, включенные в электрический кондиционер 3b воздуха, потребляют электрическую мощность аккумулятора 3b, чтобы приводить в действие электрический кондиционер 3b воздуха. По этой причине, когда электрический кондиционер 3b воздуха приводится в действие, потребление мощности аккумулятора 3b значительно изменяется.
[0015] первая муфта cl1 сцепления включает в себя такую муфту сцепления как гидравлическая однодисковая муфта сцепления, вставленная между двигателем e и мотором m. Первая муфта cl1 сцепления выполняет операцию зацепления-расцепления, включающее в себя зацепление с проскальзыванием (проскальзывание) и расцепление с проскальзыванием посредством управляющего давления масла, создаваемого блоком 5 давления масла первой муфты сцепления на основе управляющей команды от контроллера 4 первой муфты сцепления, описанного позже.
[0016] вторая муфта cl2 сцепления включает в себя такую муфту сцепления как гидравлическая многодисковая муфта сцепления, вставленная между мотором m и трансмиссией t/m. Вторая муфта cl2 сцепления выполняет операцию зацепления-расцепления, включающее в себя зацепление с проскальзыванием и расцепление с проскальзыванием, посредством управляющего давления масла, создаваемого блоком 7 давления масла второй муфты сцепления на основе управляющей команды от контроллера 6 второй муфты сцепления, описанного позже.
[0017] перегрузочная способность по крутящему моменту первой муфты cl1 сцепления и перегрузочная способность по крутящему моменту второй муфты cl2 сцепления могут изменяться непрерывно согласно подаваемому давлению масла. Также, блок 5 давления масла первой муфты сцепления и блок 7 давления масла второй муфты сцепления формируют управляющее давление масла посредством контура давления масла, включающего в себя клапан управления, непоказанный на чертежах. Тогда, посредством переменного управления управляющим давлением масла, перегрузочная способность по крутящему моменту первой муфты cl1 сцепления и перегрузочная способность по крутящему моменту второй муфты cl2 сцепления могут непрерывно изменяться.
[0018] трансмиссия t/m является трансмиссией, которая автоматически переключает передаточное отношение трансмиссии для ступенчатого управления, например, "пять ступеней переднего хода и одна ступень заднего хода" и "шесть ступеней переднего хода и одна ступень заднего хода", и т.д., и передаточное отношение бесступенчатой трансмиссии (cvt) согласно состоянию приведения в движение, такому как скорость транспортного средства, открытие акселератора и т.д. Выходной вал трансмиссии t/m соединяется с правым и левым передними колесами (ведущие колеса), или fl и fr, через карданный вал ps и конечную передачу df. Трансмиссия t/m выполняет действие переключения передачи посредством управляющего давления масла, создаваемого боком 9 давления масла трансмиссии на основе управляющей команды от контроллера 8 трансмиссии. Входной вал трансмиссии t/m включает в себя датчик s3 вращения на входе t/m для определения входной скорости вращения. Выходной вал трансмиссии t/m включает в себя датчик s4 вращения на выходе t/m для определения выходной скорости вращения.
[0019] далее объясняется устройство управления гибридного транспортного средства 100. Устройство управления включает в себя контроллер 1 двигателя, контроллер 2 мотора, инвертор 3, аккумулятор 3a, контроллер 4 первой муфты сцепления, блок 5 давления масла первой муфты сцепления, контроллер 6 второй муфты сцепления, блок 7 давления масла второй муфты сцепления, контроллер 8 трансмиссии, блок 9 давления масла трансмиссии и интегрированный контроллер 10, как показано на фиг. 1. Дополнительно, контроллер 1 двигателя, контроллер 2 мотора, контроллер 4 первой муфты сцепления, контроллер 8 трансмиссии и интегрированный контроллер 10 соединяются через can-линию l связи, чтобы предоставлять возможность обмена информацией.
[0020] в контроллер 1 двигателя информация о скорости двигателя вводится от датчика скорости двигателя, непоказанного на чертежах. В ответ на команду целевого крутящего момента двигателя от интегрированного контроллера 10 контроллер 1 двигателя выводит команду для управления рабочей точкой двигателя, например, исполнительному устройству дроссельной заслонки, непоказанному на чертежах. Дополнительно, информация о скорости двигателя подается в интегрированный контроллер 10 через can-линию l связи.
[0021] в контроллер 2 мотора информация вводится от датчика s2 положения мотора, который определяет позицию поворота ротора мотора m. В ответ на команду целевой скорости вращения мотора от интегрированного контроллера 10 контроллер 2 мотора выводит команду для управления скоростью вращения мотора для мотора m инвертору 3.
[0022] контроллер 4 первой муфты сцепления вводит информацию датчика от датчика давления масла муфты сцепления и датчика хода муфты сцепления и т.д., непоказанных на чертежах. Затем, контроллер 4 первой муфты сцепления выводит, в ответ на команду давления масла первой муфты сцепления от интегрированного контроллера 10, команду управления зацеплением, проскальзыванием (зацеплением с проскальзыванием) и расцеплением первой муфты cl1 сцепления блоку 5 давления масла первой муфты сцепления.
[0023] в контроллер 6 второй муфты сцепления вводится информация датчика от датчика давления масла муфты сцепления и датчика хода муфты сцепления и т.д., непоказанных на чертежах. Второй контроллер 6 выводит, в ответ на команду управления второй муфтой сцепления от интегрированного контроллера 10, команду управления зацеплением, проскальзыванием (зацеплением с проскальзыванием) и расцеплением второй муфты cl2 сцепления блоку 7 давления масла второй муфты сцепления.
[0024] в контроллер 8 трансмиссии вводится информация датчика от датчика открытия акселератора (не показан на чертежах), который определяет открытие акселератора, управляемого водителем, и датчика скорости транспортного средства. Затем, контроллер 8 трансмиссии, в ответ на команду переключения передачи от интегрированного контроллера 10, выводит команду, чтобы управлять давлением масла трансмиссии, блоку 9 давления масла трансмиссии.
[0025] блок 9 давления масла трансмиссии включает в себя исполнительное устройство, контур давления масла и клапан управления, которые не показаны на чертежах. Кроме того, блок 9 давления масла трансмиссии формирует предварительно определенное управляющее давление масла на основе команды управления от контроллера 8 трансмиссии, и блок 9 давления масла трансмиссии выполняет операцию переключения передачи (повышение передачи и понижение передачи) трансмиссии t/m в соответствии с управляющим давлением масла.
[0026] интегрированный контроллер 10 управляет энергией, потребляемой всем транспортным средством 100, и для того, чтобы приводить в движение транспортное средство с его максимальной эффективностью, управляет мотором m и двигателем e и т.д. В интегрированный контроллер 10 вводятся сигналы различных датчиков от датчика s1 положения двигателя, датчика s2 положения мотора, датчика s3 вращения на входе t/m, датчика s4 вращения на выходе t/m и т.д., и различные типы информации, полученной через can-линию связи.
[0027] затем, интегрированный контроллер 10 выполняет управление работой двигателя e посредством управляющей команды, отправленной контроллеру 1 двигателя, и выполняет управление работой (выходным крутящим моментом мотора и выходной скоростью мотора) мотора m посредством управляющей команды, отправляемой контроллеру 2 мотора. Также, интегрированный контроллер 10 выполняет управления зацеплением, проскальзыванием и расцеплением для первой муфты cl1 сцепления посредством команды управления давлением масла, отправленной контроллеру 4 первой муфты сцепления, и управления зацеплением, проскальзыванием, расцеплением для второй муфты cl2 сцепления посредством команды управления давлением масла, отправленной контроллеру 6 второй муфты сцепления. Интегрированный контроллер 10 управляет блоком 9 давления масла трансмиссии, отправляя команду управления трансмиссией контроллеру 8 трансмиссии.
[0028] далее объясняется конфигурация интегрированного контроллера 10. Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию интегрированного контроллера 10. Интегрированный контроллер 10 конфигурируется из cpu, rom и т.д. И включает в себя следующие структуры в качестве функционального блока различных типов функций, исполняемых посредством cpu, и т.д. Интегрированный контроллер 10 включает в себя блок 11 вычисления целевой движущей силы, блок 12 вычисления выходной мощности заряда-разряда, блок 13 управления кондиционером воздуха, блок 14 вычисления выходной мощности двигателя, блок 15 определения корректировки, блок 16 корректировки движущей силы, блок 17 вычисления требуемой выходной мощности и блок 18 отправки команды рабочей точки. Дополнительно, конфигурация интегрированного контроллера 10 не ограничивается конфигурацией, показанной на фиг. 2, и включает в себя другую конфигурацию для управления транспортным средством.
[0029] блок 11 вычисления целевой движущей силы вычисляет целевую движущую силу (pt0) на основе открытия (apo) акселератора и скорости (v) транспортного средства. Целевая движущая сила является целевым значением движущей силы, передаваемой ведущим колесам pr и pl от источника приведения в движение. Другими словами, целевая движущая сила является целевым значением для движения с помощью движущей силы, запрашиваемой водителем, например, посредством действия акселератора или т.п., которые задействуются водителем. В блок 11 вычисления целевой движущей силы заранее записывается карта, указывающая корреляцию между открытием акселератора, скоростью транспортного средства и целевой движущей силой. Затем, блок 11 вычисления целевой движущей силы вычисляет целевую движущую силу (pt0), обращаясь к карте для входных данных открытия (apo) акселератора и скорости (v) транспортного средства.
[0030] блок 12 вычисления выходной мощности заряда-разряда вычисляет выходную мощность заряда-разряда на основе soc аккумулятора 3a. Выходная мощность заряда-разряда является выходной мощностью двигателя e или входной и выходной мощностью мотора m, требуемой при заряде или разряде аккумулятора по запросу системы. Другими словами, выходная мощность заряда-разряда является выходной мощностью (выходной мощностью системы), запрашиваемой для источника приведения в движение по запросу системы. Soc является значением, указывающим состояние заряда аккумулятора 3a, и вводится в блок 12 вычисления выходной мощности заряда-разряда из контроллера аккумулятора, непоказанного на чертежах. Для того, чтобы избегать того, что аккумулятор 3a приходит в состояние переразряда или состояние перезаряда, подходящий диапазон soc задается заранее. Когда текущее soc аккумулятора 3a выше подходящего диапазона soc, блок 12 вычисления выходной мощности заряда-разряда вычисляет выходную мощность мотора m с тем, чтобы разряжать аккумулятор 3a. С другой стороны, когда текущее soc аккумулятора 3a ниже подходящего диапазона soc, блок 12 вычисления выходной мощности заряда-разряда вычисляет выходную мощность двигателя e (движущую силу двигателя) с тем, чтобы заряжать аккумулятор 3a. Затем, блок 12 вычисления выходной мощности заряда-разряда вычисляет выходную мощность (ps) заряда-разряда из мощности двигателя e или мотора m, так что soc аккумулятора 3a находится в подходящем диапазоне.
[0031] блок 13 управления кондиционером воздуха управляет рабочим состоянием электрического кондиционера 3b воздуха и потреблением электрической мощности, потребляемой электрическим кондиционером 3b воздуха. Рабочее состояние электрического кондиционера 3b воздуха указывает включенное/выключенное состояние электрического кондиционера 3b воздуха и задает температуру кондиционера воздуха и т.д. Когда включенное/выключенное состояние электрического кондиционера 3b воздуха переключается пассажиром, блок 13 управления кондиционером воздуха выводит сигнал включения/выключения электрического кондиционера 3b воздуха в блок 15 определения корректировки. Также, блок 13 управления воздушным кондиционером вычисляет потребление (pw) мощности, потребляемой электрическим кондиционером 3b воздуха, из температуры внешнего воздуха и заданной температуры электрического кондиционера 3b воздуха, и т.д., и выводит информацию о потреблении (pw) мощности в блок 16 корректировки движущей силы и блок 14 вычисления выходной мощности двигателя. Кроме того, поскольку электрический кондиционер 3b воздуха использует аккумулятор 3a в качестве своего источника мощности, потребление мощности, потребляемой электрическим кондиционером 3b воздуха, соответствует потреблению электрической мощности, потребляемой аккумулятором 3a.
[0032] блок 14 вычисления выходной мощности двигателя вычисляет выходную мощность (pe) двигателя, требуемую, чтобы формировать потребление (pw) мощности, потребляемой электрическим кондиционером 3b воздуха, в моторе m. Выходная мощность (pe) двигателя соответствует величине мощности, генерируемой мотором m, когда мотор m работает в качестве генератора мощности, приводя в действие двигатель e, и равна выходному крутящему моменту двигателя e.
[0033] блок 15 определения корректировки определяет, корректировать или нет целевую движущую силу (pt0), на основе текущей скорости транспортного средства и открытия акселератора транспортного средства. Также, блок 15 определения корректировки определяет, корректировать или нет целевую движущую силу (pt0), на основе режима работы гибридного транспортного средства. Блок 15 определения корректировки определяет, выполнять или нет корректировку, когда электрический кондиционер 3b воздуха находится во включенном состоянии. Результат определения посредством блока 15 определения корректировки выводится в блок 16 корректировки движущей силы.
[0034] блок 16 корректировки движущей силы корректирует целевую движущую силу (pt0) в соответствии с результатом определения, определенным посредством блока 15 определения корректировки, и выводит скорректированную целевую движущую силу (pt1) в блок 17 вычисления требуемой выходной мощности. Когда блок 15 определения корректировки определяет корректировку целевой движущей силы (pt0), блок 16 корректировки движущей силы вычисляет величину корректировки целевой движущей силы (pt0). Величина корректировки является значением, полученным посредством преобразования электрической мощности (выводимой от аккумулятора 3a), требуемой, чтобы приводить в действие электрический кондиционер 3b воздуха, в движущую силу источника приведения в движение. Другими словами, величина корректировки является движущей силой, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха. Дополнительно, блок 16 корректировки движущей силы корректирует целевую движущую силу (pt0), вычитая величину корректировки из целевой движущей силы (pt0).
[0035] когда блок 15 определения корректировки определяет не корректировать целевую движущую силу (pt0), блок 16 корректировки движущей силы выводит целевую движущую силу (pt0) в качестве целевой движущей силы (pt1) в блок 17 вычисления требуемой выходной мощности без корректировки.
[0036] блок 17 вычисления требуемой выходной мощности вычисляет требуемую выходную мощность (pd), складывая целевую движущую силу (pt1), выходную мощность (ps) заряда-разряда и вспомогательную выходную мощность (pa). Вспомогательная выходная мощность соответствует движущей силе, запрашиваемой источником приведения в движение для того, чтобы задействовать вспомогательные устройства. Например, при начале движения транспортного средства, вспомогательная выходная мощность является мощностью, требуемой для движения транспортного средства. Блок 17 вычисления требуемой выходной мощности вычисляет вспомогательную выходную мощность в соответствии с видами вспомогательных устройств, которые должны быть задействованы. Во вспомогательные устройства, например, включается масляный насос. Требуемая выходная мощность является выходной мощностью, требуемой источнику приведения в движение для того, чтобы удовлетворять запрос приведения в движение на основе управления акселератора водителем и по запросу системы. Когда электрический кондиционер 3b воздуха находится во включенном состоянии, поскольку выходная мощность (pe) двигателя вводится из блока 14 вычисления выходной мощности двигателя, блок 17 вычисления требуемой выходной мощности вычисляет требуемую выходную мощность (pd), складывая выходную мощность (pe) двигателя с выходной мощностью, полученной сложением целевой движущей силы (pt1), выходной мощности (ps) заряда-разряда и вспомогательной выходной мощности (pa). Блок 17 вычисления требуемой выходной мощности выводит требуемую выходную мощность (pd) в блок 18 отправки команды рабочей точки.
[0037] блок 18 отправки команды рабочей точки вычисляет каждую из рабочей точки двигателя e и рабочей точки мотора m для того, чтобы выводить требуемую выходную мощность (pd) от источника приведения в движение. Рабочая точка двигателя e указывается с помощью крутящего момента двигателя и скорости двигателя и является рабочей точкой для вывода требуемой выходной мощности, двигателю от двигателя e в состоянии хорошей топливной экономичности. Затем, блок 18 отправки команды рабочей точки вычисляет команду крутящего момента для двигателя e из текущей скорости вращения двигателя e и рабочей точки двигателя e и выводит команду контроллеру 1 двигателя. Блок 18 отправки команды рабочей точки вычисляет команду скорости вращения мотора m на основе текущей скорости вращения мотора m с тем, чтобы приводить в действие мотор m в рабочей точке и выводит команду контроллеру 2 мотора. Также, блок 18 отправки команды рабочей точки выводит такую команду как команда переключения передачи, так что требуемая выходная мощность (pd) выводится от источника приведения в движение.
[0038] в последующем, со ссылкой на фиг. 3-5, объясняется последовательность управления для интегрированного контроллера 10. Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая последовательность управления для интегрированного контроллера 10. Фиг. 4 является графиком, иллюстрирующим диапазон корректировки, в котором выполняется корректировка, касающаяся скорости транспортного средства и открытия акселератора. Фиг. 5 - это график, иллюстрирующий диапазон корректировки, в котором выполняется корректировка, касающаяся включения/выключения кондиционера воздуха и режима движения транспортного средства. Дополнительно, интегрированный контроллер 10 повторяет следующую последовательность управления в предварительно определенном цикле.
[0039] на этапе s1 блок 11 вычисления целевой движущей силы вычисляет целевую движущую силу (pt0) для ведущего колеса. На этапе s2 блок 12 вычисления выходной мощности заряда-разряда вычисляет выходную мощность (ps) заряда-разряда по запросу системы. На этапе s3 блок 13 управления кондиционером воздуха определяет, работает или нет электрический кондиционер 3b воздуха. Когда электрический кондиционер 3b воздуха работает, на этапе s4, блок 14 вычисления выходной мощности двигателя вычисляет выходную мощность (pe) двигателя на основе потребления мощности, потребляемой электрическим кондиционером 3b воздуха.
[0040] на этапе s5 блок 15 определения корректировки определяет, находится или нет состояние приведения в движение транспортного средства в диапазоне корректировки. Состояние приведения в движение транспортного средства указывается посредством скорости транспортного средства и открытия акселератора транспортного средства. Диапазон корректировки является диапазоном, в котором целевая движущая сила (pt0) корректируется посредством блока 16 корректировки движущей силы. Для блока 15 определения корректировки пороговое значение для указания диапазона корректировки задается заранее. Пороговое значение задается посредством порогового значения для скорости транспортного средства для транспортного средства (vth) и порогового значения (apoth) открытия акселератора. Тогда, диапазон корректировки является диапазоном, в котором скорость транспортного средства для транспортного средства является пороговым значением (vth) скорости транспортного средства или больше, или в котором открытие акселератора является пороговым значением (apoth) открытия или больше. Диапазон, в котором скорость транспортного средства для транспортного средства меньше порогового значения (vth) скорости транспортного средства, а также в котором открытие акселератора меньше порогового значения (apoth) открытия, исключается из диапазона корректировки. Диапазон корректировки не является диапазоном, в котором состояние медленного движения транспортного средства показано в скорости транспортного средства и открытии акселератора. Другими словами, когда состояние приведения в движение находится в состоянии медленного движения, корректировка целевой движущей силы (pt0) не выполняется. На фиг. 4 диапазон корректировки показан с помощью наклонных линий.
[0041] блок 15 определения корректировки определяет, что состояние приведения в движение находится в диапазоне корректировки, когда текущая скорость транспортного средства является пороговым значением (vth) скорости транспортного средства или больше, или когда текущее открытие акселератора является пороговым значением (apoth) открытия или больше. С другой стороны, блок 15 определения корректировки определяет, что состояние приведения в движение находится вне диапазона корректировки, когда текущая скорость транспортного средства меньше порогового значения (vth) скорости транспортного средства, и когда текущее открытие акселератора меньше порогового значения (apoth) открытия.
[0042] теперь, соотношение диапазона корректировки между рабочим состоянием электрического кондиционера 3b воздуха и режимом приведения в движение описывается со ссылкой на фиг. 5. Как показано на фиг. 5, диапазон корректировки аналогично задается для случаев, в которых режим приведения в движение транспортного средства является hev-режимом, и в которых режим приведения в движение транспортного средства является ev-режимом. Соответственно, когда электрический кондиционер 3b воздуха находится во включенном состоянии, и когда состояние приведения в движение находится в диапазоне корректировки, целевая движущая сила (pt) корректируется, когда режим приведения в движение является hev-режимом, и целевая движущая сила (pt) также корректируется, когда режим приведения в движение является в ev-режимом. Таким образом, например, когда диапазон приведения в движение находится в диапазоне корректировки, и когда режим приведения в движение переключается с hev-режима на ev-режим, или когда режим приведения в движение переключается с ev-режима на hev-режим, состояние корректировки целевой движущей силы (pt) будет сохраняться. Дополнительно, когда диапазон приведения в движение находится вне диапазона корректировки, и когда режим приведения в движение переключается с hev-режима на ev-режим, или когда режим приведения в движение переключается с ev-режима на hev-режим, состояние, в котором корректировка не выполняется для целевой движущей силы (pt), сохраняется.
[0043] с другой стороны, когда электрический кондиционер 3b воздуха находится в выключенном состоянии, диапазон корректировки не задается. Соответственно, когда электрический кондиционер 3b воздуха находится в выключенном состоянии, целевая движущая сила (pt) не корректируется.
[0044] когда состояние приведения в движение определяется как находящееся в диапазоне корректировки, посредством определения на этапе s5, блок 16 корректировки движущей силы вычисляет движущую силу источника приведения в движение, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, на этапе s6. На этапе s7 блок 16 корректировки движущей силы корректирует целевую движущую силу (p t0), выполняя обработку вычитания. Блок 16 корректировки движущей силы вычитает вычисленную движущую силу из целевой движущей силы (pt0) в качестве обработки вычитания. На этапе s8 блок 17 вычисления требуемой выходной мощности вычисляет вспомогательную выходную мощность (pa) и посредством сложения скорректированной целевой движущей силы (pt1), выходной мощности (ps) заряда-разряда, выходной мощности (pe) двигателя и вспомогательной мощности (pa) вычисляет требуемую выходную мощность (pd). Другими словами, блок 17 вычисления требуемой выходной мощности вычисляет требуемую выходную мощность (pd), складывая выходную мощность (pe) двигателя с выходной мощностью (ps) заряда-разряда и дополнительно добавляя целевую движущую силу (pt1) после корректировки и вспомогательную выходную мощность (pa).
[0045] из определения на этапе s5, когда состояние движения определяется как находящееся за пределами диапазона корректировки, блок 17 вычисления требуемой выходной мощности вычисляет вспомогательную мощность (pa) на этапе s9 и, складывая целевую движущую силу (pt0), выходную мощность (ps) заряда-разряда, выходную мощность (pe) двигателя и вспомогательную выходную мощность (pa), вычисляет требуемую выходную мощность (pd). Таким образом, блок 17 вычисления требуемой выходной мощности вычисляет требуемую выходную мощность (pd), складывая выходную мощность (pe) двигателя с выходной мощностью (ps) заряда-разряда и дополнительно добавляя целевую движущую силу (pt1), для которой обработка вычитания не добавляется, и вспомогательную выходную мощность (pa).
[0046] из определения на этапе s3, когда кондиционер воздуха определяется как остановленный, блок 17 вычисления требуемой выходной мощности вычисляет вспомогательную выходную мощность (pa) на этапе s10 и, складывая целевую движущую силу (pt0), выходную мощность (ps) заряда-разряда и вспомогательную выходную мощность (pa), вычисляет требуемую выходную мощность (pd).
[0047] на этапе s11 блок 17 вычисления требуемой выходной мощности вычисляет рабочую точку, которая соответствует вычисленной требуемой выходной мощности. На этапе s12 блок 18 отправки команды рабочей точки вычисляет такое из командного значения крутящего момента для двигателя e, с тем, чтобы задействовать двигатель e и/или мотор m в рабочей точке, и выводит результат контроллеру 1 двигателя, и т.д.
[0048] далее, соотношение между требуемой выходной мощностью, вычисленной посредством интегрированного контроллера 10, и рабочей точкой двигателя описывается с помощью фиг. 6. Фиг. 6 - это график, иллюстрирующий линию равной выходной мощности для α-линии и требуемые выходные мощности. Горизонтальная ось на фиг. 6 показывает скорость вращения, а вертикальная ось показывает крутящий момент двигателя e.
[0049] когда электрический кондиционер 3b воздуха находится в выключенном состоянии, требуемая выходная мощность становится значением, к которому добавляются целевая движущая сила (pt1) и входная и выходная мощность (ps) заряда. Целевая движущая сила (pt1) не корректируется посредством блока 16 корректировки движущей силы и является значением, таким же, что и целевая движущая сила (pt0). Затем, из требуемой выходной мощности в этот момент, выходная мощность, требуемая для двигателя e, представляется с помощью линии равной выходной мощности графика q1. Рабочая точка двигателя e относительно требуемой выходной мощности двигателя e представляется посредством точки пересечения (точки a) с α-линией. Дополнительно, α-линия является линией, которая соединяет рабочие точки, в которых эффективность выходной мощности двигателя e является высокой.
[0050] предположим, что электрический кондиционер 3b воздуха переключается из выключенного состояния во включенное состояние в состоянии, в котором двигатель e приводится в рабочей точке a. Для того, чтобы потреблять электрическую мощность аккумулятора 3a, электрический кондиционер 3b воздуха должен приводить в действие двигатель e и генерировать мощность в моторе m для величины мощности, потребляемой аккумулятором 3a. В отличие от управления согласно настоящему варианту осуществления, когда целевая движущая сила (p0) повышается для того, чтобы составлять мощность, вырабатываемую мотором, без изменения входной и выходной мощности источника приведения в движение, требуемой для системы, требуемая выходная мощность повышается, и требуемая выходная мощность двигателя e становится выходной мощностью на графике q2, которая выше выходной мощности на графике q1. Кроме того, рабочая точка a двигателя e становится рабочей точкой a' (точка пересечения линии q2 равной выходной мощности и α-линии). Другими словами, когда электрический кондиционер 3b воздуха приходит во включенное состояние, требуемая выходная мощность для двигателя e становится высокой, и посредством переключения электрического кондиционера 3b воздуха из выключенного во включенное состояние, скорость вращения двигателя e увеличивается.
[0051] дополнительно, когда электрический кондиционер 3b воздуха должен переключаться из включенного состояния в выключенное состояние в состоянии, когда величина мощности, вырабатываемой мотором, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, добавляется к целевой движущей силе, величина мощности, вырабатываемой мотором m, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, становится лишней. Соответственно, движущая сила, которая соответствует величине вырабатываемой мощности, больше не добавляется к целевой движущей силе, и, таким образом, целевая движущая сила снижается, и требуемая выходная мощность двигателя e также снижается. По этой причине, скорость вращения двигателя e снижается вследствие переключения электрического кондиционера 3b воздуха из включенного в выключенное состояние. Т.е., когда выполняется управление, которое отличается от управления в настоящем варианте осуществления, формируется колебание вращения для двигателя посредством работы кондиционера воздуха.
[0052] далее описывается рабочая точка двигателя e в управлении настоящего варианта осуществления. Как описано выше, выходная мощность, требуемая для двигателя e, даже когда электрический кондиционер 3b воздуха находится в выключенном состоянии, представляется линией равной выходной мощности графика q1, а рабочая точка двигателя e представляется точкой a на графике q1. Затем, предположим, что электрический кондиционер 3b воздуха переключается из выключенного состояния во включенное состояние. В настоящем варианте осуществления движущая сила, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, вычитается из целевой движущей силы. Посредством этой обработки вычитания для целевой движущей силы требуемая выходная мощность для двигателя e снижается с графика q1 до графика q3 (соответствует стрелке r1 на фиг. 6). Затем, в настоящем варианте осуществления, выходная мощность (pe) двигателя, требуемая, чтобы формировать потребление мощности, потребляемой электрическим кондиционером 3b воздуха, в моторе m, добавляется к выходной мощности, требуемой системой. В результате, требуемая выходная мощность для двигателя e становится высокой для величины движущей силы, которая вычитается посредством обработки вычитания для целевой движущей силы, и требуемая выходная мощность для двигателя e увеличивается с графика q3 до графика q1 (соответствует стрелке r2 на фиг. 6). Другими словами, в настоящем варианте осуществления, требуемая выходная мощность для двигателя e не изменяется, даже когда электрический кондиционер 3b воздуха изменяет выключенное состояние на включенное состояние, и рабочая точка для двигателя e становится точкой a. Соответственно, скорость вращения двигателя e не изменяется значительно и сохраняется устойчивой.
[0053] дополнительно, когда электрический кондиционер 3b воздуха переключается из включенного состояния в выключенное состояние, корректировка посредством обработки вычитания для целевой движущей силы становится ненужной, и, таким образом, целевая движущая сила повышается. Однако, поскольку выходная мощность (pe) двигателя становится нулевой, требуемая выходная мощность для двигателя e не изменяется, даже когда электрический кондиционер 3b воздуха переключается из включенного в выключенное состояние, и рабочая точка для двигателя e сохраняется в точке a. Соответственно, скорость вращения двигателя e не изменяется значительно, а сохраняется устойчивой. Другими словами, в настоящем варианте осуществления, колебание во вращении двигателя вследствие работы кондиционера воздуха (колебание вращения) может быть пресечено.
[0054] фиг. 7 описывает временную диаграмму, когда электрический кондиционер 3b воздуха переключается из выключенного состояния во включенное состояние, и затем электрический кондиционер 3b воздуха переключается из включенного состояния в выключенное состояние. Фиг. 7 является графиком для описания временной диаграммы, и (a) является графиком, описывающим переключение между включением и выключением электрического кондиционера 3b воздуха, (b) является графиком, показывающим характеристики величины выработки мощности мотора m, и (c) является графиком, показывающим характеристики движущей силы, передаваемой ведущим колесам fr и fl.
[0055] во время t1 электрический кондиционер 3b воздуха переключается из выключенного состояния во включенное состояние. Вместе с этим переключением электрического кондиционера 3b воздуха из выключенного во включенное состояние, для того, чтобы вырабатывать мощность для величины, потребляемой электрическим кондиционером 3b воздуха, в моторе m, величина выработки мощности мотора m становится высокой. В этот момент, когда величина выработки мощности мотора m быстро повышается (повышается так, чтобы создавать импульс), величина уменьшения в движущей силе, передаваемой к ведущим колесам fr и fl, увеличивается, и существует риск того, что пассажир транспортного средства почувствует дискомфорт. По этой причине, при выработке мощности, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, в моторе m, величина выработки мощности мотором m повышается постепенно.
[0056] в настоящем варианте осуществления, в течение некоторого периода времени, начинающегося с переключения электрического кондиционера 3b воздуха из выключенного состояния во включенное состояние (соответствует периоду времени между временем t1 и временем t2 на фиг. 7), для того, чтобы постепенно повышать величину выработки мощности мотора m, ограничение применяется к скорости изменения движущей силы при выполнении обработки вычитания целевой движущей силы. В частности, блок 16 корректировки движущей силы постепенно уменьшает величину вычитания вместе с истечением времени при вычитании движущей силы источника приведения в движение, которая соответствует потреблению мощности (величине выработки мощности мотора m), потребляемой электрическим кондиционером 3b воздуха, из целевой движущей силы. Затем, блок 16 корректировки движущей силы выполняет обработку вычитания таким образом, чтобы делать вычитаемую величину равной потреблению мощности, потребляемой электрическим кондиционером 3b воздуха (величине (px) выработки мощности мотора m) во время t2. Также, блок 14 вычисления выходной мощности двигателя, посредством соответствующего ограничения скорости изменения движущей силы посредством блока 16 корректировки движущей силы, ограничивает скорость изменения выходной мощности (pe) двигателя. В частности, что касается потребления мощности, потребляемой электрическим кондиционером 3b воздуха, блок 14 вычисления выходной мощности двигателя постепенно увеличивает выходную мощность (pe) двигателя вместе с истечением времени. Затем, блок 14 вычисления выходной мощности двигателя вычисляет выходную мощность (pe) двигателя, так что выходная мощность (pe) двигателя равна потреблению мощности (величине выработки мощности мотора m), потребляемой электрическим кондиционером 3b воздуха во время t2.
[0057] таким образом, как показано на графике (b) на фиг 7, величина выработки мощности мотора m между временем t1 и временем t2 постепенно увеличивается с предварительно определенным наклоном. Вместе с изменением в величине выработки мощности вычитаемая величина из целевой движущей силы (pt1) и выходной мощности (pe) двигателя также увеличивается постепенно с предварительно определенным наклоном. Дополнительно, когда вычитаемая величина целевой движущей силы (pt0) увеличивается с предварительно определенным наклоном, движущая сила ведущих колес постепенно уменьшается, как показано в графике (c) на фиг. 7, и движущая сила становится меньше pv (см. График (c) на фиг. 7). Таким образом, при переключении электрического кондиционера 3b воздуха из выключенного во включенное состояние, движущая сила может управляться таким способом, чтобы избегать ощущения дискомфорта пассажира (толчок). Между временем t1 и временем t2, хотя величина выработки мощности мотором m, становится меньше потребления мощности (величины потребления мощности), потребляемой электрическим кондиционером 3b воздуха, недостаток в величине выработки мощности мотора m (соответствует диапазону, показанному как s1 на графике (b)) может быть покрыт посредством разряда аккумулятора 3a.
[0058] далее, во время t3, электрический кондиционер 3b воздуха переключается из включенного состояния в выключенное состояние. Вместе с этим переключением электрического кондиционера 3b воздуха из включенного в выключенное состояние, выработка мощности мотором m, чтобы подавать мощность в количестве, потребляемом электрическим кондиционером 3b воздуха, становится ненужной. В этот момент, когда величина выработки мощности мотором m, быстро становится небольшой, величина увеличения в движущей силе, передаваемой ведущим колесам fr и fl, становится большой и может вести к дискомфорту пассажира транспортного средства. По этой причине, когда выработка мощности посредством мотора m для подачи потребления мощности, потребляемой электрическим кондиционером 3b воздуха, становится равной нулю, величина выработки мощности мотора m постепенно уменьшается.
[0059] в настоящем варианте осуществления, для того, чтобы постепенно уменьшать величину выработки мощности мотора m, в течение некоторого периода времени с момента времени, в который электрический кондиционер 3b воздуха переключается из включенного состояния в выключенное состояние (соответствует периоду времени между временем t3 и временем t4 на фиг. 7), выполняется ограничение для скорости изменения для движущей силы, при снятии обработки вычитания по отношению к целевой движущей силе. В частности, блок 16 корректировки движущей силы уменьшает движущую силу источника приведения в движение, которая соответствует потреблению мощности (величине выработки мощности мотором m), потребляемой электрическим кондиционером 3b воздуха, и постепенно увеличивает величину увеличения вместе с прохождением времени при увеличении целевой движущей силы. Затем, блок 16 корректировки движущей силы вычисляет целевую движущую силу (pt1) в качестве целевой движущей силы (pt0), так что величина увеличения в момент времени t4 соответствует вычитаемой величине в обработке вычитания. Также, блок 14 вычисления выходной мощности двигателя, в соответствии со скоростью изменения движущей силы в блоке 16 корректировки движущей силы, ограничивает скорость изменения выходной мощности (pe) двигателя. В частности, блок 14 вычисления выходной мощности двигателя постепенно уменьшает выходную мощность (pe) двигателя, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, вместе с прохождением времени. Затем, блок 14 вычисления выходной мощности двигателя вычисляет выходную мощность (pe) двигателя, так что выходная мощность (pe) двигателя становится нулевой во время t4.
[0060] как показано в графике (b) на фиг. 7, величина выработки мощности мотора m со времени t3 по время t4 постепенно уменьшается с предварительно определенным наклоном. Вместе с изменением в величине выработки мощности величина увеличения целевой движущей силы (pt1) постепенно увеличивается с предварительно определенным наклоном, а выходная мощность (pe) двигателя постепенно уменьшается с предварительно определенным наклоном. Дополнительно, когда целевая движущая сила (pt1) увеличивается с предварительно определенным наклоном, движущая сила ведущих колес постепенно увеличивается, как показано на графике (c) на фиг. 7, и становится pv. Таким образом, при переключении электрического кондиционера 3b воздуха из включенного состояния в выключенное, чтобы избегать ощущения дискомфорта для пассажира (толчка), движущая сила может управляться. Между временем t3 и временем t4, хотя величина выработки мощности мотором m становится больше потребления мощности (величины потребления мощности), потребляемой электрическим кондиционером 3b воздуха, избыток в величине выработки мощности мотора m (соответствует диапазону, показанному как s2 на графике (b)) может быть покрыт посредством заряда аккумулятора 3a.
[0061] как может быть видно из вышесказанного, в настоящем варианте осуществления, когда электрический кондиционер 3b находится во включенном состоянии, движущая сила, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, вычитается из целевой движущей силы (pt0), а также выходная мощность (pe) двигателя, требуемая, чтобы формировать потребление мощности, потребляемой электрическим кондиционером 3b воздуха, посредством мотора m, добавляется к выходной мощности, требуемой системой, и вычисляет требуемую выходную мощность для источника приведения в движение. Таким образом, колебание в скорости двигателя вследствие работы электрического кондиционера 3b воздуха может быть пресечено. Также, даже когда электрический кондиционер 3b воздуха начинает свою работу, в то же время пресекая колебание в скорости двигателя, рабочая точка двигателя может поддерживаться выше α-линии.
[0062] также, в настоящем варианте осуществления, когда электрический кондиционер 3b воздуха находится во включенном состоянии, когда скорость транспортного средства для транспортного средства равна или ниже предварительно определенной скорости (vth ) транспортного средства, и когда открытие акселератора является предварительно определенным значением (apoth) или ниже, требуемая выходная мощность вычисляется без вычитания движущей силы, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b мощности, из целевой движущей силы (pt0) и без добавления выходной мощности (pe) двигателя к выходной мощности, требуемой из системы. Таким образом, движущая сила медленного движения, передаваемая ведущим колесам fr и fl, может быть обеспечена, а также управление может быть выполнено так, чтобы не терять способность преодолевать подъем.
[0063] кроме того, в настоящем варианте осуществления, когда режим приведения в движение транспортного средства является ev-режимом, и когда электрический кондиционер 3b воздуха находится во включенном состоянии, требуемая выходная мощность вычисляется посредством вычитания движущей силы, которая соответствует потреблению мощности, потребляемой электрическим кондиционером 3b воздуха, из целевой движущей силы (pt0) и добавления выходной мощности, которая соответствует потреблению мощности, потребляемой электрическим кондиционером воздуха, к выходной мощности, требуемой системой. Таким образом, когда режим приведения в движение переключается между ev-режимом и hev-режимом, формирование различия крутящего момента может быть пресечено. В ev-режиме, поскольку двигатель не приводится в действие, потребление мощности, потребляемой электрическим кондиционером 3b воздуха, покрывается посредством разряда аккумулятора 3a, также, обработка добавления к выходной мощности, запрашиваемой из системы, выполняется, чтобы разряжать электрическую мощность для величины потребления мощности, потребляемой электрическим 3b кондиционером воздуха, посредством аккумулятора 3a. По этой причине, выходная мощность, которая соответствует потреблению мощности (выходная мощность, сложенная с требуемой выходной мощностью из системы), потребляемой электрическим кондиционером 3b воздуха, является равной выходной мощности (pe) двигателя hev-режима.
[0064] вышеописанный блок 11 вычисления целевой движущей силы соответствует "блоку вычисления целевой движущей силы" согласно настоящему изобретению, а блок 13 управления кондиционером воздуха соответствует "блоку управления кондиционером воздуха" согласно настоящему изобретению. Также, блок 12 вычисления выходной мощности заряда-разряда, блок 13 управления кондиционером воздуха, блок 14 вычисления выходной мощности двигателя, блок 15 определения корректировки, блок 16 корректировки движущей силы, блок 17 вычисления требуемой выходной мощности и блок 18 отправки команды рабочей точки соответствуют "блоку управления" согласно настоящему изобретению.
[описание позиционных обозначений]
[0065] 1… контроллер двигателя
2… контроллер мотора
3… инвертор
3a… аккумулятор
3b… электрический кондиционер воздуха
10… интегрированный контроллер
11… блок вычисления целевой движущей силы
12… блок вычисления выходной мощности заряда-разряда
13… блок управления кондиционером воздуха
14… блок вычисления выходной мощности двигателя
15… блок определения корректировки
16… блок корректировки движущей силы
17… блок вычисления требуемой выходной мощности
18… блок отправки команды рабочей точки
100… гибридное транспортное средство
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство управления для транспортного средства
Устройство управления для гибридного транспортного средства
Устройство управления транспортного средства и способ управления им
Устройство рекуперативного управления скоростью транспортного средства

