Результат интеллектуальной деятельности: БЫТОВЫЕ УСТРОЙСТВА С РЕГУЛИРОВКОЙ МОЩНОСТИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к ручным бытовым устройствам, имеющим функцию регулировки мощности.
Предпосылки изобретения
Многие бытовые устройства имеют функцию регулировки мощности, включая кухонные устройства, а также личные устройства для ухода за волосами.
Например, электродвигатели в кухонных устройствах (например, миксеры, ручные блендеры и т.д.) обычно управляются с помощью кнопок и поворотных переключателей. Эти элементы управления не являются интуитивно понятными, и поскольку элементы управления будут занимать много места, они будут ограничивать свободу конструктивного исполнения устройства.
Следовательно, существует необходимость во входе управления для регулировки мощности, которая является более интуитивно понятной для пользователя ручных бытовых устройств, занимающих меньше места.
DE 297 19 596 раскрывает переносное устройство для обработки пищевого продукта, такого как блендер, в котором используется опорная площадка для обеспечения управления скоростью электродвигателя.
WO 2005 106 335 раскрывает варочную печь, содержащую элемент для измерения площади, так что печь может управляться на основании измеренной площади.
Разные пользователи будут иметь разную силу руки и разный размер руки, так что устройство ввода давления может не содержать поверхность контакта, которая ощущается интуитивно всеми пользователями.
Краткое описание настоящего изобретения
Настоящее изобретение определено формулой изобретения.
В соответствии с настоящим изобретением описано ручное бытовое устройство, содержащее
ручку;
ведомый элемент;
электродвигатель для приведения в действие ведомого элемента; и
контроллер для управления электродвигателем,
причем ручка содержит поверхностный датчик для определения площади поверхностного контакта и давления, и контроллер выполнен с возможностью управления питанием, подаваемым на электродвигатель в зависимости от измеренной площади поверхностного контакта и измеренного давления,
причем способ, с помощью которого регулировка мощности изменяется в зависимости от измеренного давления, зависит от измеренной площади контакта.
Это устройство имеет интуитивную регулировку мощности, которая использует контроль поверхности, а не физическое перемещение кнопки управления. Площадь контакта, например, может использоваться для определения того, сколько пальцев приложено к поверхностному датчику, так что разное количество пальцев соответствует разным заданным установкам. Например, приведения одного пальца в контакт с датчиком дает одну установку скорости, и приведения в контакт другого пальца дает другу установку скорости. В одном примере это означает, что пользователю не нужно прикладывать значительное усилие, чтобы привести в действие устройство. Учитывая измеренную площадь контакта, также можно эффективно блокировать использование конкретных опасных устройств для инвалидов и детей.
Контроллер может быть выполнен с возможностью использования калибровки, определенной пользователем, для измеренной площади поверхностного контакта. Это может быть использовано для установки порогов, ниже которых устройство не будет работать, и/или порогов для установок разных уровней.
Поверхностный датчик может быть дополнительно предназначен для определения давления, и контроллер выполнен с возможностью управления питанием, подаваемым на электродвигатель в зависимости от измеренного давления. В этом случае поверхностный датчик используется для выдачи информации как о площади, так и о давлении. Способ, с помощью которого управление питанием изменяется в зависимости от давления, затем может зависеть от площади контакта. Например, для небольшой площади контакта низкое давление может потребоваться для заданной установки мощности, так что более маленькому человеку не нужно сильнее нажимать на более маленькую площадь для достижения того же уровня результирующего давления, необходимого для конкретной установки мощности. Таким образом, может использоваться установка порогов как площади, так и давления, которые обеспечивают интуитивное понимание для пользователя. Это понимание также может быть адаптировано для конкретных пользователей с разным размером и силой рук.
Регулирование давления обычно означает то, что за счет более сильного нажатия мощность электродвигателя (и, следовательно, скорость) может быть увеличена без необходимости перемещения руки. Это обеспечивает более интуитивно понятный способ управления. Он также может быть использован для решений по обеспечению безопасности на основании уровней давления (а также или вместо этого на основании площади), как и в предыдущем случае, например, для блокирования использования конкретных опасных устройств для инвалидов и детей.
Контроллер может быть выполнен с возможностью применения калибровки пользователем к измеренному давлению. Калибровка, определенная пользователем, площади и/или давления означает то, что порог или набор порогов может быть индивидуальной в соответствии с калибровкой личного напряжения и/или размера пальца, пальцев, ладони или руки пользователя. Таким образом, становится возможным адаптировать функцию устройства для обеспечения удобного и интуитивного ощущения для конкретного пользователя. Калибровка содержит установку зависимости между давлением, приложенным пользователем, и/или площадью поверхностного контакта и питанием, приложенным к электродвигателю, (которое проявляется в виде скорости электродвигателя).
Поверхностный датчик обычно имеет большую площадь, чем простая нажимная кнопка.
Поверхностный датчик может иметь наружную поверхность, которая вдавливается менее, чем на 1 мм для диапазона приложенных давлений, соответствующего полному диапазону управления питанием. Слой поверхностного датчика (который может или не может быть наружным слоем) может содержать материал, который упруго деформируется в соответствии с приложенным давлением. В качестве альтернативы, слои могут не деформироваться, а могут перемещаться в соответствии с приложенным давлением, например, для изменения воздушного зазора или небольших газовых пор.
Управление скоростью, таким образом, по существу, зависит от приложенного давления, а не перемещения, площади, к которой приложено это давление (даже если деформация датчика будет давать некоторое перемещение).
Датчик может иметь даже меньшую степень сжатия, например, меньше 0,5 мм или даже меньше 0,2 мм. Предпочтительно, крышка, например из резины, листа пластмассы или пенопласта с толщиной, например, в диапазоне от нескольких микрометров до нескольких миллиметров может использоваться для закрытия или окружения датчика.
Поверхностный датчик может содержать две матрицы электродов, встроенных в деформируемый диэлектрический материал, или между которыми расположен слой диэлектрического материала. Пары электродов образуют отдельные датчики давления/контактные датчики, и за счет образования матрицы датчик может также определять местоположения, в которых приложено давление.
Это обеспечивает простую конструкцию датчика, который может определять локальные изменения емкости. Электрические контакты просто необходимы для электродов двух матриц электродов для измерения с помощью цепи обнаружения, которая может быть реализована с низкой стоимость. Каждый отдельный датчик давления может использовать более двух электродов в сложенной в штабель конфигурации для обеспечения увеличенной емкости.
Альтернативой является слой, заполненный проводящими частицами. При приложении давления расстояние между частицами может быть уменьшено, получая изменение проводимости/сопротивления.
Поверхностный датчик может иметь площадь в диапазоне 2-30 см2.
Площадь датчика будет зависеть от типа осуществляемого управления. Для определения давления пальца площадь 2-5 см2 может использоваться для каждого пальца, образуя часть управления. Для определения давления/площади ладони или результирующей плотности захвата может использоваться большая площадь 5-30 см2. Большая площадь датчика также может обеспечивать реакцию датчика на общую площадь контакта и дополнительно также на приложенное давление.
Поверхностный датчик может содержать контакты сзади датчика. Это обеспечивает простое нанесение на поверхность устройства посредством склеивания.
Датчик может быть предназначен для приведения в действие одним пальцем, пальцами, ладонью или полным захватом ручки. Эти разные возможности будут приводить к разным предпочтительным размерам в пределах общего диапазона. Большая площадь для определения всей руки приводить к повышению безопасности, например, предотвращая приведение в действие маленькими детьми.
Контроллер может содержать
сопротивление, соединенное последовательно с конденсатором, образованным поверхностным датчиком;
переключатель для разрядки для разрядки конденсатора; и
схему измерения времени для определения времени зарядки конденсатора из разряженного состояния до опорного напряжения и для управления переключателем для осуществления разрядки конденсатора.
Это обеспечивает простую схему для измерения емкости посредством измерения времени зарядки через известное сопротивление. Фактическая емкость не должна быть получена по той причине, что измерение времени обеспечивает сигнал управления, который зависит от емкости.
Схема измерения времени предпочтительно периодически осуществляет процесс разрядки и определение времени. Таким образом, схема может периодически контролировать приложенное давление при включении. Период находится, например, в диапазоне 1-100 мс. Период является достаточно малым, чтобы можно было регулировать скорость во время работы, и достаточно большим, чтобы необходимая обработка сигнала была простой.
Схема измерения времени может содержать счетчик, который работает при более высокой частоте, чем частота процессов разрядки и определения времени.
Таким образом, один и тот же счетчик может управлять временем периодической разрядки, а также измерением продолжительности времени для зарядки конденсатора. Контроллер может быть стандартным микроконтроллером с малой стоимостью.
Контроллер может быть выполнен с возможностью использования одной из набора скоростей электродвигателя в зависимости от выходного сигнала поверхностного датчика. Набор скоростей электродвигателя может быть выбран на основании типа устройства и числа разных установок скорости, подходящих для этого устройства. Набор скоростей электродвигателя может содержать нулевую скорость, максимальную скорость и, по меньшей мере, одну промежуточную скорость.
Устройство предпочтительно удерживается непрерывно во время использования, и мощность регулируется во время использования. Удобство в использовании поверхностного датчика представляет особенный интерес для таких устройств.
В одном наборе примеров устройство может содержать кухонное устройство, в котором ведомый элемент содержит элемент для обработки пищевого продукта, и устройство включает в себя одно из
стержневого блендера;
миксера;
измельчителя;
кухонного комбайна;
мельницы; или
соковыжималки.
В другом наборе примеров устройство может включать в себя одно из
устройства для ухода за полостью рта, такого как зубная щетка;
устройства для ухода за волосами, такого как электробритва.
Таким образом, настоящее изобретение может использоваться в большом диапазоне бытовых устройств для обеспечения повышенного комфорта и интуитивного управления для пользователя.
Настоящее изобретение также описывает способ управления ручным бытовым устройством, содержащим ручку, ведомый элемент и электродвигатель для приведения в действие ведомого элемента, причем устройство содержит поверхностный датчик, расположенный на ручке устройства для определения площади поверхностного контакта и давления, причем способ включает в себя
определение площади поверхностного контакта и давления с помощью поверхностного датчика; и
управление питанием, подаваемым на электродвигатель, в зависимости от измеренной площади поверхностного контакта и измеренного давления.
Краткое описание чертежей
Примеры настоящего изобретения будут описаны подробно со ссылкой на сопроводительные чертежи, на которых
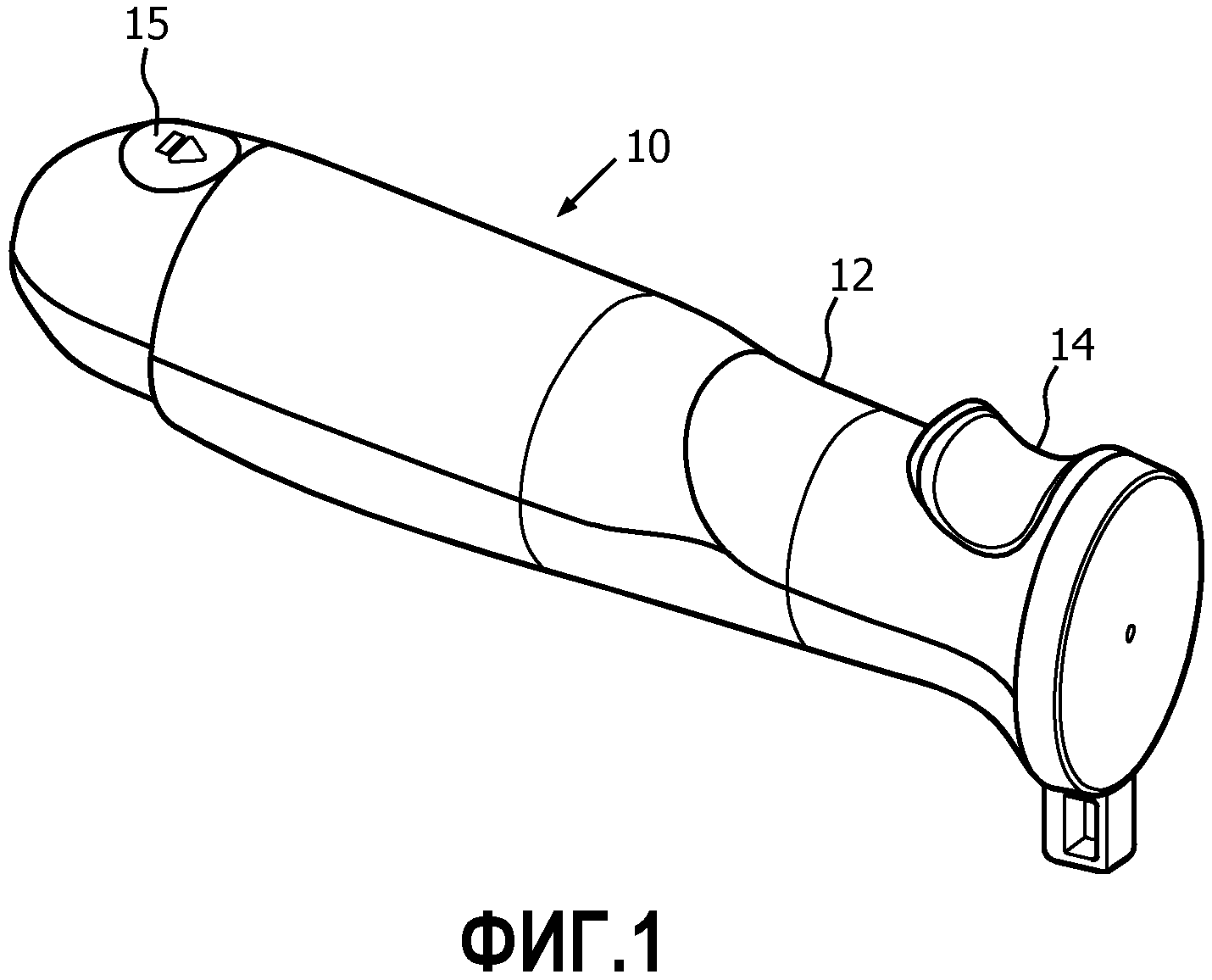
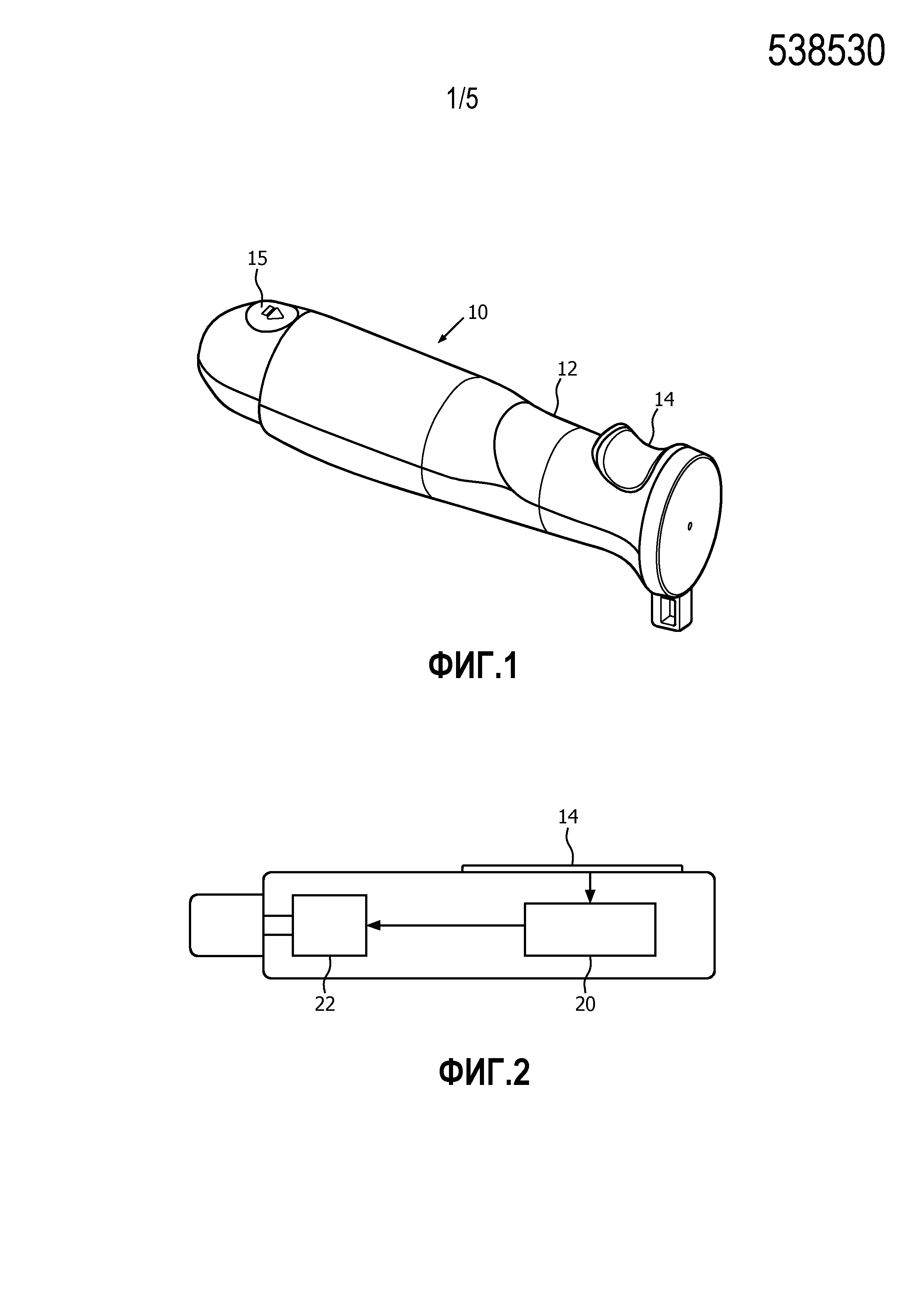
Фиг.1 - пример устройства в виде стержневого блендера;
фиг.2 - система управления, используемая в устройстве на фиг.1;
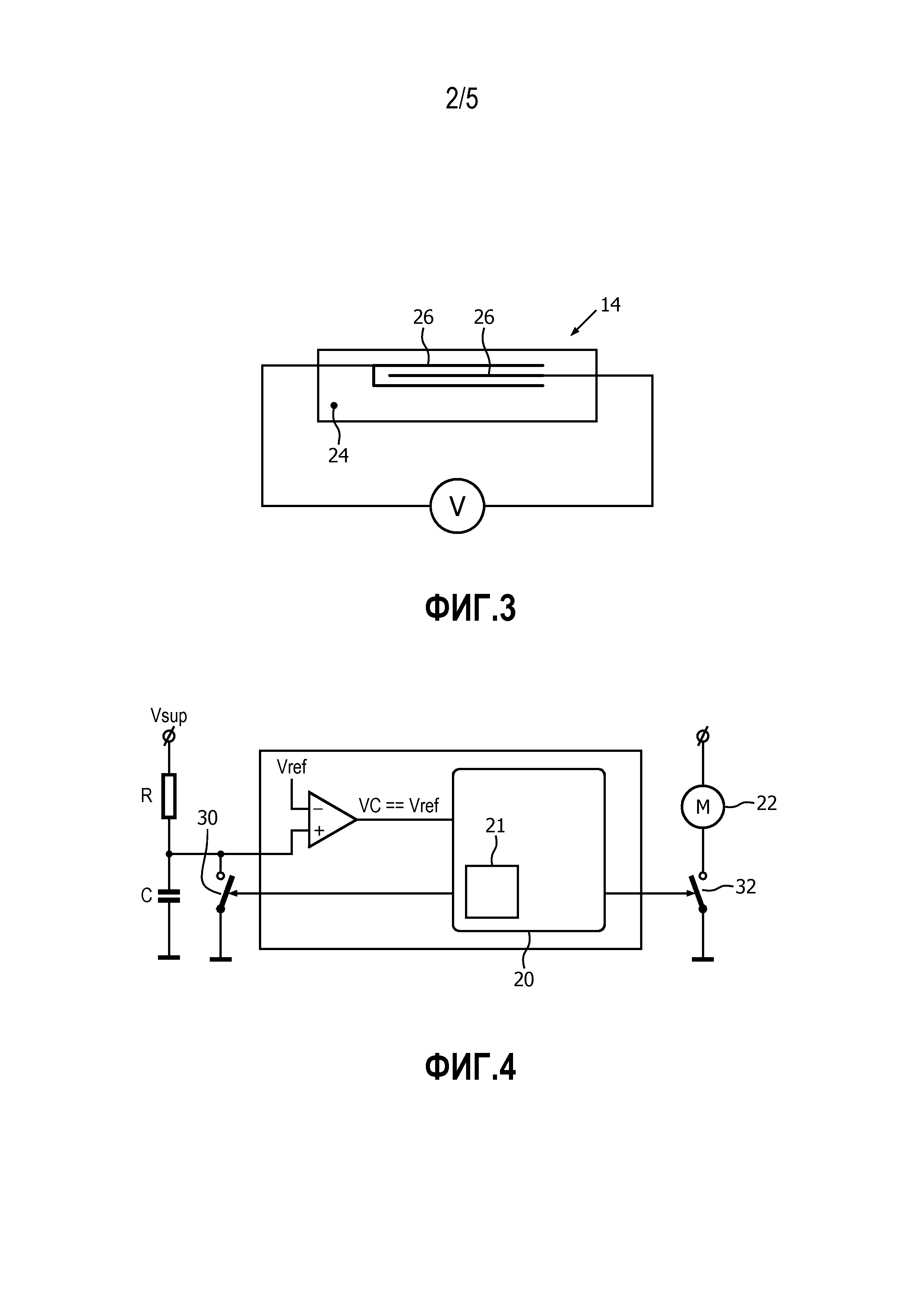
фиг.3 - один пример поверхностного датчика для использования в устройстве на фиг.1;
фиг.4 изображает то, как может быть измерена емкость датчика;
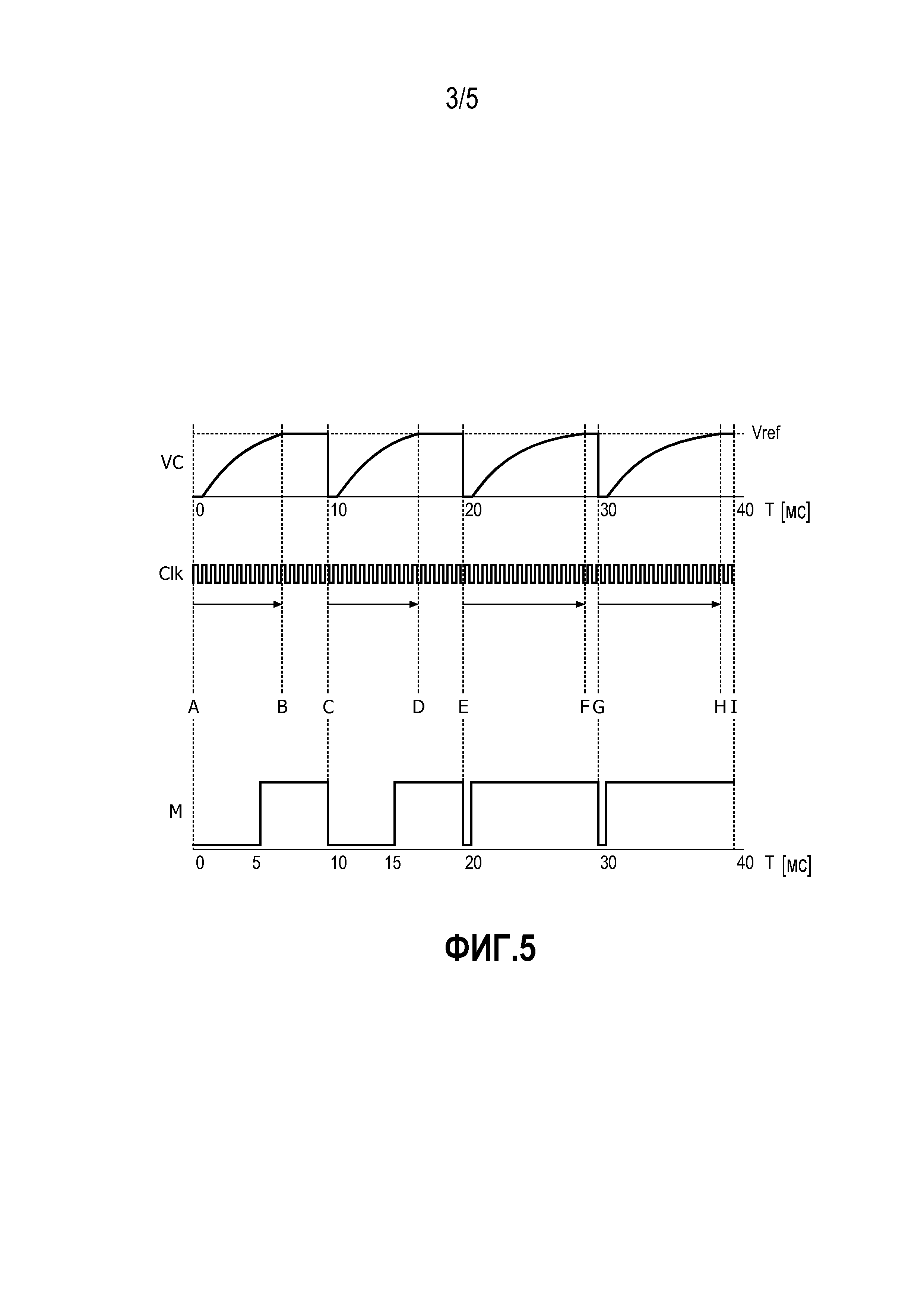
фиг.5 - временная диаграмма для объяснения работы устройства на фиг.1;
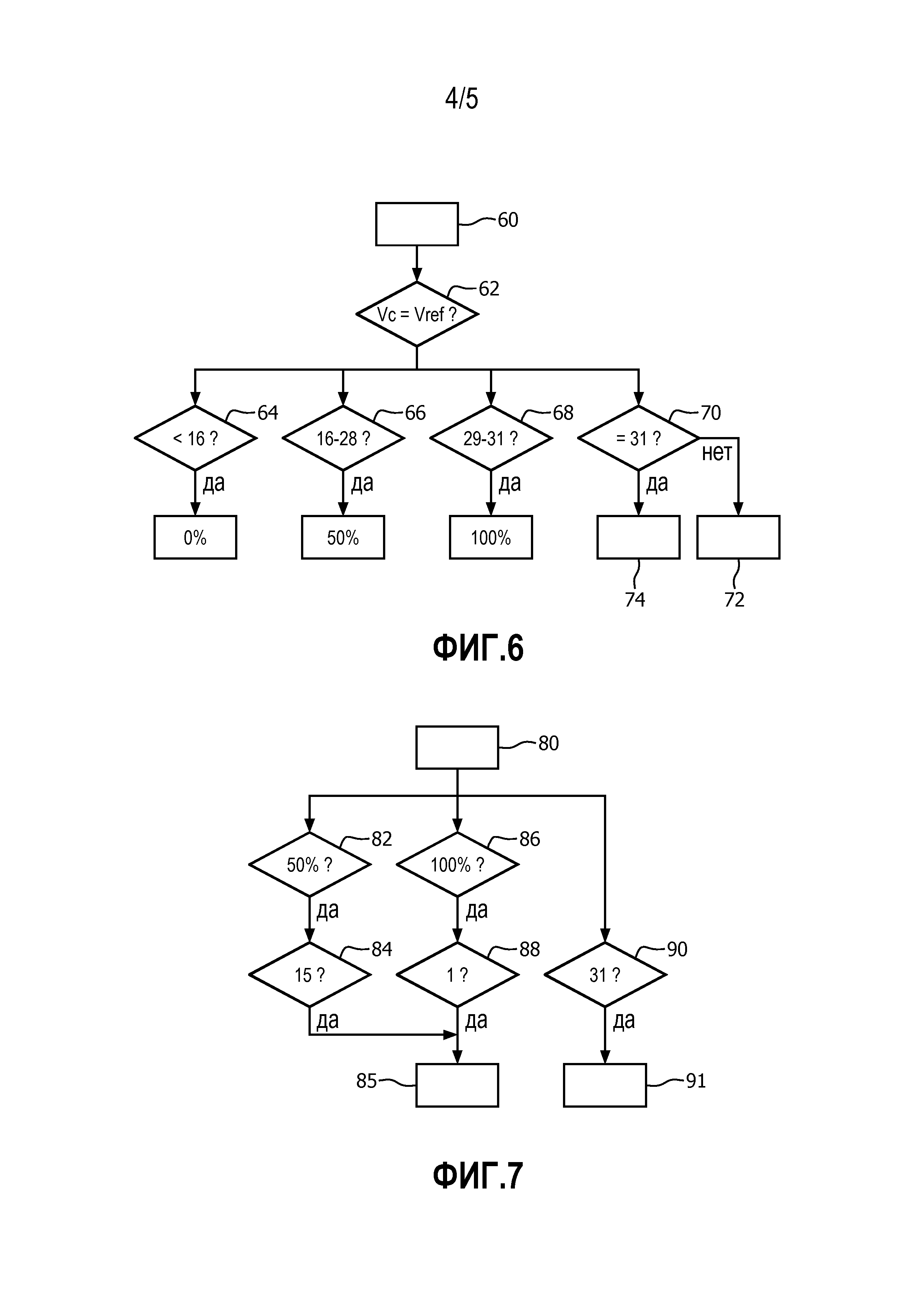
фиг.6 - первая схема последовательности операций для объяснения работы контроллера, используемого в устройстве на фиг.1;
фиг.7 - вторая схема последовательности операций для объяснения работы контроллера, используемого в устройстве на фиг.1; и
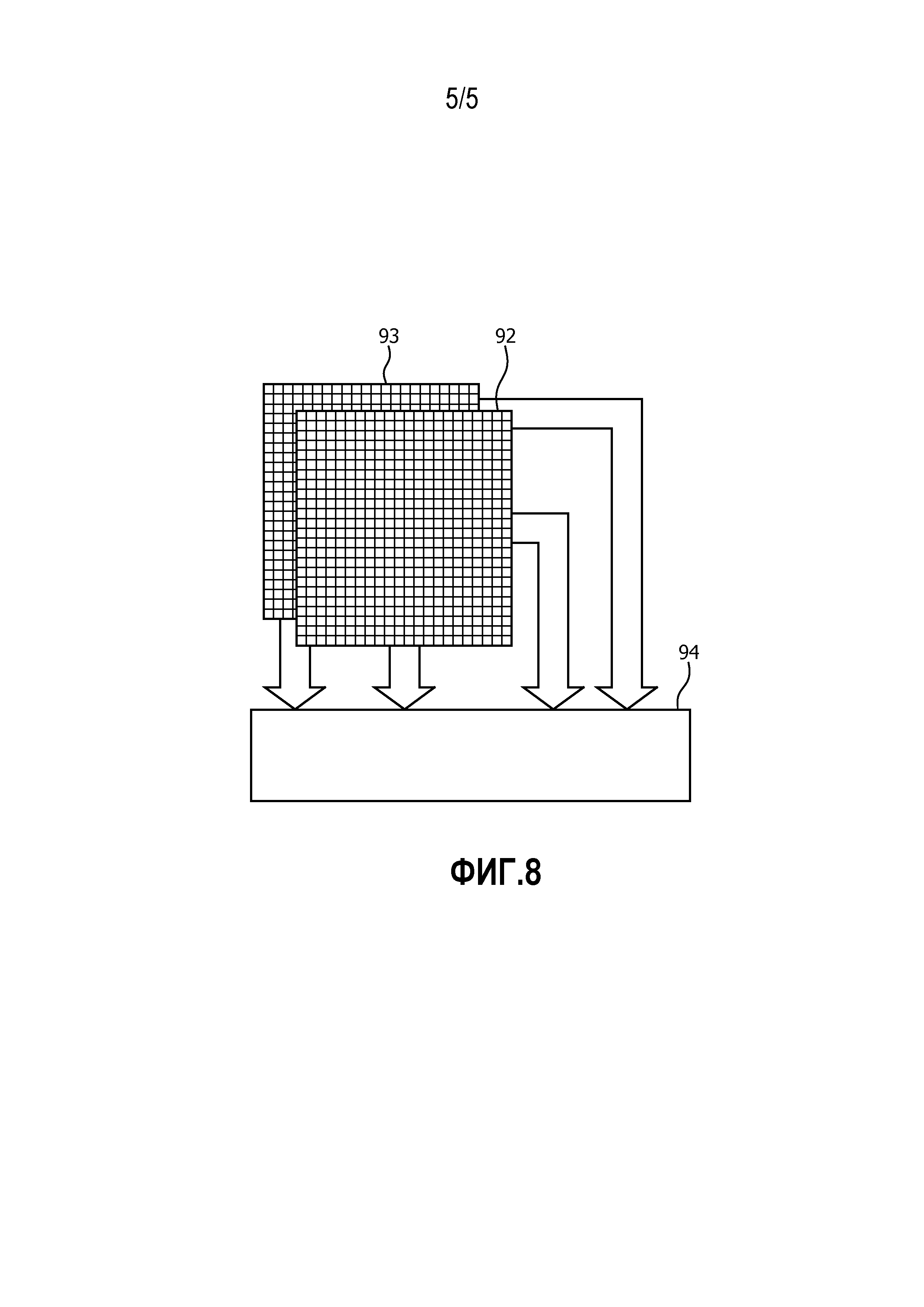
фиг.8 изображает поверхностный датчик, выполненный в виде матрицы элементов поверхностного датчика.
Подробное описание вариантов осуществления
Настоящее изобретение описывает ручное бытовое устройство, содержащее ручку, ведомый элемент, электродвигатель для приведения в действие ведомого элемента и контроллер для управления электродвигателем. Ручка содержит поверхностный датчик для определения площади контактной поверхности и/или давления, и контроллер выполнен с возможностью управления мощностью электродвигателя в зависимости от измеренной площади контактной поверхности и/или давления. Работа поверхностного датчика может быть отрегулирована для конкретного пользователя.
Это обеспечивает улучшенный механизм управления для электродвигателей в бытовых устройствах (таких как миксеры или ручные блендеры), поскольку датчик может, например, быть встроен в ручку устройства или находиться в положении естественного касания для руки и/или пальца. Часто требуются разные уровни управления (например, скорость электродвигателя), так что датчик может измерять приложенное давление/силу или площадь для обеспечения разных уровней управления. Кроме того, пороги для этих сигналов давления или площади могут быть установлены как часть процесса калибровки пользователем.
Так как датчик предназначен для установки на поверхности, он может быть деформируемым, водонепроницаемым и удобным для очистки.
Фиг.1 - перспективный вид первого примера стержневого блендера, использующего конструкцию датчика настоящего изобретения.
Блендер содержит основной корпус 10, имеющий ручку 12. Поверхностный датчик 14 расположен на ручке для управления скоростью электродвигателя. В этом примере поверхностный датчик расположен в местоположении пальцев пользователя при захвате ручки. Кнопка 15 фиксатора позволяет менять местами установленные приспособления, такие как смешивающее приспособление или сбивающее приспособление.
Датчиком является поверхностный датчик, под которым подразумевается то, что он определяет давление на поверхность и/или площадь. Перемещение датчика при приведении в действие пользователем меньше нажимной кнопки или нажимного скользящего контакта. Например, предпочтительно датчик имеет наружную поверхность, которая вдавливается менее чем на 1 мм для диапазона приложенных давлений, соответствующего полному диапазону регулировки мощности. Деформация может быть значительно меньше, например, меньше 0,5 мм или меньше 0,2 мм.
Поверхностный датчик используется для определения площади контактной поверхности и дополнительно также приложенного давления.
Поверхностный датчик обеспечивает более интуитивное управление по сравнению с переключателем или вращающейся ручкой. Для перемешивания картофеля или тыквенного супа, где необходима более прочная ручка, использование определения давления означает то, что более прочная ручка автоматически приводит к увеличенной мощности электродвигателя, когда блендер вдавливается в овощи.
Датчик предпочтительно использует деформируемые материалы в отличие от элементов, которые перемещаются механически. Таким образом, перемещение механических частей заменено статическими элементами поверхностного датчика. Это обеспечивает более интуитивный интерфейс по сравнению с механической структурой управления. Обеспечена также большая свобода конструктивного исполнения. За счет изготовления датчика из упругих материалов, можно свободно выбирать наружную форму и материал. Например, это дает возможность легко обеспечивать водонепроницаемость, легко очищаемые конструкции и антибактериальные свойства.
Посредством исключения подвижных механических частей также получены преимущества в экономии места. Только необходимо учитывать толщину датчика. Толщина, включающая в себя крышку, может находиться в диапазоне от нескольких микрометров до нескольких миллиметров. Процесс сборки также упрощен, например, датчик 14 может удерживаться за счет приклеивания.
На фиг.2 изображена общая схема. Поверхностный датчик 14 выдает свой выходной сигнал на контроллер 20, который приводит в действие электродвигатель 22 устройства.
На фиг.3 изображен первый пример датчика 14. Этот пример представляет собой емкостной датчик давления, который содержит деформируемый диэлектрический материал 24, который расположен между (и дополнительно также окружает) упругими электродами 26. Единичные чувствительные элементы могут быть установлены поверх друг друга для увеличения начальной емкости.
Посредством герметизации электродов в диэлектрическом материале 24, как показано, уменьшено емкостное взаимное влияние. Электрод, обращенный к руке пользователя, также выбирают, который должен быть общим заземляющим электродом.
Датчик выполнен с возможностью использования в кухонных устройствах или других бытовых устройствах. Это требует того, чтобы датчик был упругим и чувствительным в диапазоне наведенного давления руки человека. Минимальная необходимая емкость должна быть достаточно высокой, чтобы предотвратить помехи со стороны окружающей среды, например, больше 1 пФ для емкостного датчика, как изображено. Изменение емкости, соответствующее полному диапазону давлений, должно определяться надежным способом.
Емкостной датчик может иметь большую площадь, например, больше 1 см2 и дополнительно около 30 см2. Например, датчик расположен на ручке устройства, как показано на фиг.1 для устройства, используемого одной рукой. Однако, он может быть расположен на отдельной доступной прикосновению поверхности ручки, например, если устройство предназначено для использования обеими руками.
Датчик может иметь, например, твердые тонкие металлические электроды или угольные электроды с мягким гибким полимером между ними для обеспечения деформируемости конфигурации. В качестве альтернативы, электроактивный полимер может быть расположен между гибкими электродами, обеспечивая высокую электромеханическую эффективность. Другой возможной конструкцией является слой, заполненный проводящими частицами на конкретном расстоянии друг от друга. Посредством приложения давления частицы будут перемещаться ближе друг к другу, приводя к изменению проводимости/сопротивлению.
Структура деформируемого емкостного датчика, изображенного на фиг.3, сравнима с другими сенсорными исполнительными механизмами с обратной связью. Датчик образован в слоях для вставки электродов в диэлектрический материал.
Деформируемый диэлектрический материал может быть выбран в соответствии с модулем Юнга (определение способности к сжатию) и диэлектрической постоянной (определение емкостных свойств). Диэлектрик может быть эластомером, таким как силикон, полиакрилат или полиуретаны. Могут быть использованы другие электрострикционные материалы, такие как поли(винилиденфторид) (PVDF), и сополимеры и терполимеры на основе PVDF, из-за их высокой диэлектрической постоянной. Промышленные полимеры, такие как полиэтилен, полиимид и полипропилен, а также несколько типов каучука могут быть использованы, которые могут обеспечивать низкую стоимость. Диэлектрические свойства материала, таким образом, могут быть выбраны для разных диапазонов давления/силы, диэлектрического значения и герметизирующих слоев за счет изменения материала.
Электроды могут быть выполнены из металла, углерода или других упругих электропроводящих материалов. Несколько материалов для электродов могут быть использованы. До тех пор, пока деформация остается ниже +/-5%, большая часть металлических электродов может быть использована. Если большая деформация необходимо в окончательной конструкции, проводящие полимеры, такие как PEDOT, PEDOT-PSS и PANI могут быть предпочтительными. Для очень больших деформаций углеродные частицы или углеродная смазка могут быть подходящим вариантом.
Контроллер 20 имеет ряд разных функций, включая определение изменения емкости, пороговые функции для предотвращения изменений управления на основании случаев без вмешательства пользователя, калибровку и обеспечение безопасности или функции пользователя (подобно управлению в походных условиях и т.д.) или обратную связь.
Калибровочная функция может заключаться в приглашении для пользователя приложить легкое давление, среднее давление и высокое давление. Затем, контроллер может извлекать подходящие пороговые значения (значения 16, 17, 28, 29, 31, используемые на этапах 64, 66, 68 на фиг.6, описанной ниже) для адаптации работы устройства к конкретным характеристикам пользователя.
Возможны различные подходы для измерения изменения емкости.
Одним простым подходом является подача вполне определенного тока на емкость через последовательно соединенное сопротивление. Повышение напряжения определяется уравнениями, приведенными ниже. Поскольку все, не один, параметры в этих уравнениях являются постоянными, время для изменения емкости относительно опорного напряжения (Vref) линейно связано с величиной (С) емкости.

Vsup - напряжение питания, Vref - опорное напряжение, до которого заряжается конденсатор, и C - емкость. V(t) напряжение конденсатора в зависимости от времени, и R - последовательно соединенное сопротивление.
На фиг.4 изображены емкость C, сопротивление R и напряжение Vsup питания.
Контроллер 20 включает в себя счетчик 21 (программно-реализованный на основании тактовых импульсов контроллера) для управления в соответствии с временной диаграммой. Контроллер управляет переключателем 30 разрядки, который параллелен емкости, и управляет переключателем 32 для приведения в действие электродвигателя 22.
Контроллер, например, может разряжать емкость каждые 10 мс. Затем начинается зарядка емкости через последовательно соединенное сопротивление, и контроллер контролирует прошедшее время. Когда напряжение VC(t) конденсатора достигает опорного напряжения Vref, прошедшее время считывается и используется для расчета рабочего цикла для приведения в действие электродвигателя.
На фиг.5 изображена временная диаграмма для объяснения работы датчика. Верхняя кривая (VC) изображает кривые зарядки для конденсатора. Нижняя кривая (M) изображает управляющий сигнал на электродвигатель, и средняя кривая (Clk) изображает тактовый сигнал контроллера, который используется в качестве счетчика времени. Таймер имеет частоту 3,2 кГц, так что имеются 32 тактовых периода в течение каждого периода 10 мс.
Если приложено небольшое давление, величина емкости будет относительно низкой, и, следовательно, время, необходимое для заряда до опорного напряжения Vref является относительно коротким. Это указано первыми двумя кривыми зарядки на фиг.5 между моментами A и B времени и между моментами C и D времени.
В моменты A и C времени конденсатор разряжен, готовый для цикла зарядки. В моменты B и D времени со счетчика тактовых импульсов контроллера считываются показания в виде измерения прошедшего времени.
Относительно низкое давление приводит к рабочему циклу 50%, как показано на нижней кривой.
Большее давление приложено в момент E времени, так что величина емкости увеличивается, и в зависимости от этого требуется время для зарядки до Vref. Разрядка конденсатора и счет времени выполняются таким же образом. Затем, рабочий цикл становится близким к 100% (высокое давление). Для плавной работы электродвигателя при всех условиях частота, например, установлена на 100 Гц, обеспечивая период 10 мс сигнала управления электродвигателем.
Контроллер управляет различными процессами.
Первым является счет от 0 до 31 при частоте тактовых импульсов 3,2 кГц. Это может быть осуществлено в виде пятиразрядного счетчика. Счетчик устанавливается в исходное положение для продолжения счета периодов тактовых импульсов. В начале зарядки счетчик повторно устанавливают и начинают контролировать время, которое необходимо, чтобы VC достигло Vref. На основании значения счетчика при достижении Vref рассчитывается и используется заданный рабочий цикл для приведения в действие электродвигателя.
Вторым является анализ значения счетчика тактовых импульсов, когда напряжение достигает напряжения считывания. Этот процесс изображен на фиг.6.
В то время, когда VC достигает Vref, значение счетчика тактовых импульсов сравнивается с набором порогов.
Процесс начинается на этапе 60 и затем выжидает на этапе 62, чтобы VC достигло Vref.
Затем, значение счетчика сравнивается с порогами.
Сравнение на этапе 64 включает электродвигатель, если счетчик тактовых импульсов ниже 16, указывая на очень низкое приложенное давление.
Сравнение на этапе 66 включает электродвигатель в режим с рабочим циклом 50%, если счетчик тактовых импульсов находится между 16 и 28, указывая на среднее приложенное давление.
Сравнение на этапе 68 включает электродвигатель в рабочий цикл 100%, если счетчик тактовых импульсов находится между 29 и 31, указывая на максимальное приложенное давление.
Таким образом, рабочий цикл для электродвигателя (постоянного тока) имеет следующие значения в зависимости от значения счета:
Счет < 16 → DC=0%
Счет=22±1 → DC=50%
Счет=30±1 → DC=100%
На этапе 70 определяется, закончился ли цикл, когда счет достигает 31. Если он закончился, осуществляется этап 72 разрядки, иначе зарядка продолжается на этапе 74.
На фиг.6 представлены только три разные рабочие циклы: 0%, 50% и 100%. Однако, это можно быть легко увеличено до любого другого числа. Если необходимо больше уровней, тактовая частота может быть увеличена.
Как упомянуто выше, значения, используемые на этапах 64, 66, 68 определения порога, могут регулироваться пользователем, или на основании последовательности инициализации, или как параметры, которые пользователь может вводить в контроллер через пользовательский интерфейс.
Таким образом, устройство осуществляет калибровку, определенную пользователем, площади контактной поверхности и/или давления.
Одним способом для осуществления этой калибровки является то, чтобы устройство имело режим калибровки пользователем. Во время этого режима устройство может требовать очень легкого приложенного давления или небольшой площади контакта для приложения к ручке, затем, измерять емкость таким же способом, как описано выше. Для матрицы датчиков (как описано ниже) можно также определять площадь независимо от приложенного давления. Затем, устройство может требовать максимального приложенного давления или максимальной площади контакта, и снова измерять емкость таким же способом, как описано выше, и снова можно независимо определять площадь контакта. Из этих двух экстремальных значений могут быть установлены два порога, или еще три или более порогов может быть экстраполировано. Таким образом, режим калибровки пользователем может вместо этого требовать более двух давлений, вводимых пользователем, или более двух площадей контакта, к которым должны прикладываться давления.
В описании, приведенном ниже, когда ссылка сделана на давления, те же самые принципы применяются для использования площади контакта в виде параметра управления.
Единственный ввод может быть достаточным во время калибровки пользователем, который определяет максимальное давление, которое пользователь хотел бы приложить, и затем пороговые значения могут быть установлены между фиксированным минимальным давлением и максимальным давлением, вводимым пользователем. Вместо фиксирования можно считать, что уровнем минимального давления является часть максимального давления, которое вводится пользователем (например, одна вторая от этого давления).
Устройство может обеспечивать работу элемента для обработки пищевого продукта во время этого режима калибровки пользователем, так что у пользователя возникает хорошее ощущение от того, как работает устройство при решении, какой уровень давления должен соответствовать этой работе. В качестве альтернативы, калибровка пользователем может осуществляться без работы электродвигателя.
Множество параметров пользователей может быть введено, так что устройство, которое используется множеством людей, может быть настроено отдельно для этих разных пользователей. Затем, пользователь может, например, вводить данные, при этом пользователь использует, например, набор кнопок ввода, причем каждая кнопка соответствует разной конфигурации устройства.
На фиг.7 изображен процесс управления электродвигателем. Процесс начинается на этапе 80. На этапе 82 определяется то, что составляет ли установка рабочего цикла 50% значение. Если это имеет место, то когда счетчик достигает 15, как определено на этапе 84, электродвигатель приводится в действие на этапе 85.
На этапе 86 определяется то, что составляет ли установка рабочего цикла 100% значение. Если это имеет место, то когда счетчик достигает 1, как определено на этапе 88, электродвигатель приводится в действие на этапе 85.
Электродвигатель продолжает работать до тех пор, пока не будет остановлен с помощью последующей команды останова. В частности, на этапе 90 определяется, когда счетчик достигнет 31, и электродвигатель затем останавливается на этапе 91. Таким образом, даже установка 100% рабочего цикла имеет один период тактовых импульсов с нулевой длительностью импульса для генерации сигнала 100 Гц.
Датчик может быть выполнен с возможностью обеспечения дополнительного повышения безопасности, особенно, если используется датчик с большой площадью.
Датчик с большой площадью может иметь площадь 10-30 см2.
Как упомянуто выше, поверхностный датчик может измерять площадь контакта и дополнительно также давление. Существуют различные возможные конструктивные исполнения поверхностного датчика, так что он может измерять или только площадь, или еще он может независимо измерять площадь и давление.
Первое конструктивное исполнение может определять только площадь контакта. Для этой цели матрица датчиков давления может быть расположена на соответствующей поверхности. Каждый датчик давления может генерировать простой бинарный выходной сигнал, так что каждый отдельный датчик давления выполняет функцию контактного датчика. Другие только контактные датчики могут использоваться для этой цели, и они также могут быть емкостными датчиками. Число датчиков, где определяется контакт, может использоваться для определения площади контакта. Разные области (и местоположение этих областей) затем могут сопоставляться с разными установками скорости. Например, могут быть чувствительные области на местах подушечек пальцев или области на ладони, так что определяется число пальцев, контактирующих с датчиком. Затем, может быть использован пороговый уровень, чтобы не принимать во внимание ладонь и/или пальцы ниже порогового размера для предотвращения приведения в действие устройства детьми. Число областей пальцев, с которыми контактируют, может обеспечивать управление скоростью, тогда как общая площадь или площадь ладони может обеспечивать порог для предотвращения приведения в действие устройства маленькими детьми.
Второе конструктивное исполнение может определять площадь контакта и давление. Для этой цели матрица датчиков давления может быть расположена на соответствующей площади. Каждый датчик давления может генерировать выходной многоуровневый сигнал давления, так что каждый отдельный датчик давления выполняет функцию как контактного датчика (т.е., если определяется полностью любое давление), так и датчика давления. Кроме того, число датчиков давления, когда определяется полностью любой контакт, может использоваться для определения площади контакта. Информация об уровне давления также может использоваться для определения уровней локальных давлений и результирующего приложенного давления. Разные уровни давления затем могут соотноситься с разными установками скорости при дополнительном включении порогов, которые могут быть основаны на площади и дополнительно также на давлении. Например, могут быть выполнены установки размера ладони руки для обеспечения признака эффективной безопасности в дополнении к управлению, которое затем основано, по существу, на давлении. Таким образом, устройство может сочетать признаки эффективной безопасности, а также интуитивное управление. В этом примере поверхностный датчик может независимо определять площадь контакта и давление.
Следует отметить, что емкостной датчик может использоваться в качестве датчика определения площади контакта, даже если он содержит единственную площадь датчика. В частности, если происходит, по существу, бинарное изменение диэлектрической проницаемости в соответствии с приложенным контактом или давлением и, таким образом, бинарное изменение локальной емкости, тогда небольшая площадь контакта будет приводить к меньшему изменению емкости по сравнению с большой площадью контакта (независимо от приложенного давления).
Использование площади в качестве безопасного порога также обеспечивает выполнение признака безопасности в том, что ошибочное включение, если устройство упало, вряд ли вероятно, а также включение детьми становится более трудным.
Если датчик реагирует не только на площадь контакта, но также на приложенное давление, тогда может быть установлен порог, который достигается сочетанием используемыми площадью и усилием.
Другие датчики могут использоваться для определения площади контакта и дополнительно также давления. Контроллер также может отфильтровывать короткие пики, которые не могут генерироваться человеком.
За счет соответствующего выполнения формы и установки порогов датчик может быть выполнен особенно пригодным для пожилых людей или инвалидов.
На фиг.8 изображен схематичный вид, который иллюстрирует то, что как может использоваться матрица датчиков, которая включает в себя матрицу независимых чувствительных элементов. Матрица датчиков в этом примере содержит первую и вторую матрицы 92, 93 электродов, которые образуют матрицу независимых емкостных датчиков давления. Сигналы с электродов направляются на контроллер 94. Как описано выше, датчики давления могут выполнять функцию только контактных датчиков, так что число приводимых в действие датчиков относятся к площади контакта, или же каждый датчик может обеспечивать показание давления, так что поверхностный датчик обеспечивает более сложную обработку информации как о площади, так и о давлении.
Датчик может использоваться для выполнения дополнительных функций. Например, последовательность приложений давления или приложений контакта к последовательности чувствительных площадей, можно определяться, например, для обеспечения функции стабилизации скорости, если на датчик нажать дважды.
Датчик может быть объединен с системой, которая включает в себя сенсорную обратную связь.
Датчик может быть приклеен на устройстве во время изготовления, причем только необходимо сквозное соединение для возможности электрического соединения с управляющей электроникой. Для этой цели контакты с датчиком могут быть обеспечены на поверхности датчика, противоположной области, где расположен ввод для пользователя.
Вышеупомянутый пример основан на датчике, который определяет изменение емкости, и другие значения полного сопротивления могут быть смодулированы и считаны поверхностным датчиком. Электродвигатель управляется широтно-импульсной модуляцией в вышеупомянутом примере, но могут быть использованы другие управления электродвигателем, например, изменение напряжения питания в зависимости от измеренного значения.
Система использует контроллер. Элементы, которые могут быть использованы для контроллера включают в себя, но не ограничиваясь этим, известные микропроцессоры, специализированные микросхемы (ASICs) и программируемые логические интегральные схемы (FPGAs).
В различных осуществлениях процессор или контроллер может быть соединен с одной или более запоминающими носителями, такими как энергозависимая память компьютера и энергонезависимая память компьютера, такие как оперативная память (ОЗУ), программируемое ПЗУ, стираемое программируемое ПЗУ и электрически стираемое программируемое ПЗУ. Запоминающий носитель может быть закодирован одной или более программами, которые при выполнении на одном или более процессорах и/или контроллерах, выполняются при требуемых функциях. Различные запоминающие носители могут быть установлены в процессоре или контроллере или могут переноситься, так что одна или более программ, сохраненных на нем, могут загружаться в процессор или контроллер.
Другие изменения в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения на основании изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и неопределенный артикль ʺaʺ или ʺanʺ не исключает множества. Тот факт, что конкретные средства перечислены во взаимно разных зависимых пунктах формулы изобретения, не исключает того, что сочетание этих средств не может использоваться для получения преимущества. Любые ссылочные позиции в формуле изобретения не должны истолковываться как ограничивающие объем.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Электроактивный полимерный актюатор
Электроактивный полимерный исполнительный механизм
Интерфейс пациента с прокладкой для предотвращения красных следов
Переключатель на основе электроактивного или фотоактивного полимера
Чистящее устройство для полости рта с регулируемой формой и способ чистки полости рта
Медицинское зондовое устройство для ультразвуковой визуализации
Преобразователь для преобразования электрического и/или радиационного сигнала в перемещение или наоборот

