Результат интеллектуальной деятельности: Способ радиолокационного обзора пространства
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано при построении или модернизации вращающихся многофункциональных радиолокационных систем (ВМРЛС) с двумерной фазированной антенной решеткой (ФАР).
Современные ВМРЛС с ФАР необходимы для быстрой оценки изменяющейся воздушной обстановки и получения высококачественных оценок координат и скоростей сопровождаемых целей и их распознавания. Соответственно они решают совместно задачи обзора пространства, обнаружения целей, завязки трасс и сопровождения целей.
Известен способ [Патент РФ на изобретение №2478981, МПК G01S 13/44, опубл. 10.04.2013] увеличения скорости обзора пространства, в котором используется вращающаяся радиолокационная система, состоящая из двух ФАР, электрически управляемых по азимуту и углу места, и направленных в противоположную сторону. Круговой обзор производится двумя ФАР за один оборот системы. Сопровождение целей производится через половину оборота". После обнаружения цели осуществляется повторное направление луча в точку с координатами, где произошло обнаружение. Если обнаружение подтверждается, то луч на ту же цель может быть направлен в третий раз. Это позволяет осуществить завязку трассы по новой цели в течение короткого времени, меньшего времени половины оборота антенны. Распределение времени оборота между обзором с одной стороны и завязкой трасс, выявлением ложных засечек и сопровождением целей с другой стороны является на каждом обороте постоянным. Для уменьшения возможных простоев, по результатам предыдущего оборота, на следующем обороте данное распределение оптимизируется за счет изменения скорости механического вращения системы.
Недостатком данного способа является высокая стоимость используемой для его реализации антенной системы, состоящей из двух фазированных антенных решеток (ФАР) с двумерным электронным сканированием. Кроме того, затруднительно менять на каждом обороте скорость вращения системы, масса которой для работы в S диапазоне около 1т. Спецификой данной системы является и то, что в ней возможны дополнительные паузы в работе не только из-за неточного распределения времени оборота между видами работ, но и из-за невозможности обеспечить во всех случаях требуемые, по условию электромагнитной совместимости, единые параметры излучающих импульсов для очередных посылок в независимо работающих двух ФАР.
Известен способ [Патент РФ на изобретение №2611434, МПК G01S 13/04], в котором используют одну вращающуюся антенну с электронным сканированием по азимуту и по углу места. Для реализации обзора пространства и обнаружения целей при одновременном их сопровождении всю зону обзора по азимуту разбивают на одинаковые сектора определенного размера. Время, в течение которого нормаль антенны проходит каждый сектор, делят на 2 части: время поиска Tn, отводимое на поиск целей в данном секторе, и время сопровождения Тс, отводимое на завязку трасс новых и сопровождение высокоскоростных и маневрирующих целей из этого же сектора. Соотношение между этими временами выбирают адаптивным, разным для каждого сектора, в зависимости от того, сколько ранее обнаруженных высокоскоростных и маневренных целей находится на сопровождении в данном секторе. При выборе соотношения между временами так же задаются, с запасом, возможным количеством новых целей и ложных отметок, которые могут быть обнаружены при просмотре данного сектора в режиме поиска, и для попыток завязки по ним трасс. При вращении РЛС и переходе нормали к плоскости антенны из сектора в сектор в каждом из них режимы поиска и сопровождения чередуются друг с другом во времени. В каждом секторе сначала в течении времени Тп за счет электронного сканирования лучом с одновременным механическим вращением антенны выполняется обзор всего очередного сектора, при этом длительность пачки зондирующих импульсов, посылаемых в каждое направление, выбирается меньше, чем время поступления нового направления обзора в механически вращающийся азимутальный сектор. Далее, за счет электронного откидывания луча в обратном вращению антенны направлении в данном секторе в течении времени Тс производятся завязки трасс и автосопровождения целей. Таким образом, переходя из сектора в сектор, ВМРЛС с ФАР без пропусков, т.е. непрерывно, осматривает всю зону обзора в режиме поиска с одновременным сопровождением, осуществляя завязки трасс по вновь обнаруженным целям и уточняя координаты сопровождаемых целей.
В типичной ВМРЛС с одной двумерной ФАР сантиметрового диапазона, сопровождение целей производится на каждом обороте, а обзор всего заданного пространства за постоянное фиксированное число оборотов S. Для обзора пространства по рассмотренному способу в такой ВМРЛС разбивка всего пространства обзора на отдельные сектора должна производиться не только по азимуту, но и по S ступеням по углу места. На каждом обороте должен производиться круговой обзор пространства, соответствующего одной угломестной ступени, а обзор всей области пространства осуществляется за S оборотов антенны со ступенчатым изменением угломестных секторов.
Недостатками способа являются возможные паузы в излучении (потери времени), пока нормаль к плоскости антенны не перейдет на следующий сектор, а завязки трасс и автосопровождение целей в данном секторе уже закончились, т.е. заняли время меньше, чем планируемое с запасом время Тс. Другим недостатком является замедленная реакция на обнаруженную новую цель, завязка трассы которой возможна только после окончания обзора всего очередного сектора. За это время могут существенно измениться координаты обнаруженной цели и измениться в худшую сторону условия завязки трассы.
Наиболее близким к заявляемому является способ обзора пространства, основанный на использовании вращающейся радиолокационной системы с двухмерным электронным сканированием [Д.А. Этингтон, П.Дж. Карилас, Дж.Д. Райт. Многофункциональные вращающиеся РЛС с электронным сканированием для обзора воздушного пространства. ТИИЭР, том 73, №2, февраль, 1985. М.: Мир. Стр. 199-213]. Для измерения координат целей по азимуту и углу места используется моноимпульсный метод. Для обеспечения многофункциональной работы с распределением ресурсов функции обнаружения оптимизируются независимо от функций сопровождения. Скорость вращения выбирается достаточно высокой, чтобы обеспечить необходимую скорость обновления данных для сопровождения целей, а обзор пространства осуществляется ступенчатым методом, при котором обзор по углу места всей области пространства осуществляется за несколько оборотов антенны.
Процесс обнаружения цели и захват ее на сопровождение производится следующим способом. В ВМРЛС начальное обнаружение превышения сигнала над порогом сразу вызывает повторное направление луча в точку с координатами, где произошло обнаружение. Для этого используется возможность электронного сканирования антенны по углу места и азимуту. Если обнаружение подтверждается, то далее луч на ту же цель может быть направлен в третий раз. Такая последовательность наблюдений обеспечивает начало сопровождения с очень высокой степенью достоверности и в течение короткого времени, меньшего времени половины оборота антенны.
В процессе сопровождения ВМРЛС периодически обеспечивает экстраполяцию положения сопровождаемой цели и направляет лучи точно в ее экстраполированное положение, что позволяет обновлять данные сопровождения с высокой эффективностью. Для каждой цели формируются и выделяются специальные лучи, частота повторения импульсов (ЧПИ) и энергия сигналов оптимизируются с учетом параметров каждой цели, что позволяет исключить слепые дальности и скорости и максимизировать уровень сигнала по отношению к нежелательным отражениям, а это значительно улучшает непрерывность и длительность сопровождения.
Обзор пространства осуществляется посредством изменения положения лучей в соответствии со следующими принципами:
1) Обзор заданного пространства производится за несколько оборотов. На каждом обороте производится круговой обзор по азимуту в пределах одной ступени по углу места. Каждая из угломестных ступеней состоит из нескольких рядов положений перекрывающихся лучей обзора, с учетом изменения их количества и ширины в зависимости от угла места.
2) Время обзора одного направления для всех направлений, входящих в одну угломестную ступень, постоянно и одинаково, а для разных ступеней различно. Как и в способе аналога, это время выбирается меньше, чем время поступления нового направления обзора этой угломестной ступени в механически вращающийся азимутальный сектор.
Общий временной ресурс на каждом обороте ВМРЛС жестко распределяют между режимами обзора, завязки трасс и сопровождения. Причем, ресурс времени на сопровождение и завязку трасс выделяют исходя из заранее заданного максимального количества сопровождаемых целей, завязок трасс и возможных ложных обнаружений. В типовом примере ВМРЛС, рассмотренном в указанном наиболее близком аналоге, распределение времени на обзор, сопровождение и завязку принято, соответственно, как 57%, 21% и 22%. Отсюда, если в этой ВМРЛС при обзоре воздушные цели не обнаружены, то примерно 40% времени будут составлять простои в излучении.
Недостатком наиболее близкого аналога является неэффективное использование временного ресурса в случае, если количество целей на сопровождении меньше максимального, взятого при расчете. При этом в процессе работы РЛС возникают паузы, которые можно было бы использовать для уменьшения периодов обзора направлений пространства и повышения тем самым накопленной вероятности обнаружения.
Технической задачей изобретения является разработка способа радиолокационного обзора пространства вращающейся многофункциональной радиолокационной системы с электронным сканированием лучом, при котором увеличивается скорость обзора пространства из-за исключения простоев излучения, при обеспечении быстрой завязки трасс вновь обнаруживаемых целей и их периодического сопровождения.
Способ радиолокационного обзора пространства, основан на применении радиолокационной системы, состоящей из одной фазированной антенной решетки с электронным сканированием по углу места и азимуту с одновременным механическим вращением антенны по азимуту, при котором в режиме сопровождения для измерения координат целей по азимуту и углу места используют моноимпульсный метод, обеспечивают многофункциональную работу РЛС с выполнением обзора заданного кругового пространства по фиксированным угловым направлениям за несколько оборотов антенны, автоматического сопровождения ранее обнаруженных целей, завязки трасс по новым целям за время прохождения вращающейся антенной азимутального сектора электронного управления лучом путем повторного многократного направления луча в точку с координатами, где произошло их начальное обнаружение, причем скорость вращения антенны выбирают такой, чтобы обеспечить требуемый период обращения к сопровождаемым целям. При этом используют пачки зондирующих импульсов, посылаемых в каждое угловое направление, длительность которых равна минимальному периоду обзора при отсутствии ложных обнаружений, целей и пауз, усредненному по всем угловым направлениям, и деленному на число фиксированных позиций обзора, разделяют азимутальный сектор электронного управления лучом на две неравные части- переднюю по ходу вращения антенны и заднюю, и перед каждой посылкой пачки зондирующих импульсов производят динамический выбор выполняемой функции в приоритетном порядке, а именно завязка трассы, автосопровождение, обзор. При обзоре направление установки луча выбирают следующим образом: если максимальная пауза после последнего обзора во всех направлениях обзора, находящихся в задней части вращающегося сектора электронного управления лучом, превышает аналогичную максимальную паузу для передней части этого сектора, на время поворота антенны вне сектора электронного сканирования, то выбирают направление срочного обзора из задней части сектора, в котором имеет место максимальная пауза, если указанное соотношение между паузами не выполняется, то выбирают направление обзора из передней части сектора, в котором имеет место максимальная пауза. При этом величину задней части сектора выбирают равным произведению скорости механического вращения антенны на максимальное время выполнения завязок, которые могут в нее попасть, и срочных обзоров, для исключения в них приращения периода обзора более, чем на длительность одного оборота антенны.
Более подробно предлагаемый способ обзора описывается следующим образом. Обзор пространства производят за счет электронного сканирования лучом с одновременным механическим вращением антенны. Все направления обзора в заданном пространстве фиксированы относительно стабилизированной системы координат, связанной с землей, а их координаты хранятся в памяти вычислителя МРЛС. Кроме того, в памяти этого вычислителя хранятся даты (ti=t, где t - текущее время) последнего обзора в каждом i-том направлении. Длительность пачки импульсов, посылаемых в каждое направление одинакова.
Завязку трассы, как самый приоритетный режим, производят сразу после обнаружения цели в обзоре за счет электронного откидывания луча в обратном вращению антенны направлении и повторного направления луча в точку с координатами, где в режиме поиска произошло обнаружение новой цели, и в случае подтверждения обнаружения направляют луч на ту же цель в третий раз, осуществляя тем самым завязку трассы по новой цели в течение короткого времени.
В следующем по приоритету режиме сопровождения целей обеспечивают экстраполяцию их положения на момент текущего временного интервала, и электрически направляют луч в экстраполированное положение, осуществляя в зависимости от параметров цели, однократное или неоднократное обращение к цели в течение времени нахождения ее в пределах текущего азимутального сектора электронного управления лучом. Наименьший приоритет имеет режим обзора, однако для предотвращения сбоев работы ВМРЛС из-за локальной пространственной целевой и помеховой перегрузки целесообразно принудительно после превышения определенной максимальной паузы между обзорами, возникшей, например, из-за завязки или двух-трех идущих подряд сопровождений, производить новую посылку обзора.
При обзоре все направления, находящиеся в текущем положении сектора электронного управления лучом, имеющего размер, определяемый в зависимости от количества целей, а также от тактических требований к локатору, например, ±30° относительно нормали к плоскости ФАР, делятся на две, не равные, части: передняя по ходу вращения антенны и задняя.
Передняя часть предназначена для выполнения основной работы в указанном приоритетном порядке: завязок, сопровождений и обзоров. Задняя часть сектора является вспомогательной и предназначена для выполнения завязок, которые могут в нее попасть, и только срочных обзоров, для исключения в них приращения периода обзора более, чем на длительность одного оборота антенны. Размер задней части сектора выбирают равным произведению скорости механического вращения антенны на суммарное время выполнения завязок, которые могут попасть в заднюю часть сектора, и срочных обзоров, производимых в ней. В свою очередь, максимальное число этих завязок и срочных обзоров зависит от возможной максимальной пространственной плотности целей и принятой максимальной паузы между обзорами.
Перед каждым интервалом очередного обзора в передней части текущего положения сектора из всех направлений этой части сектора определяется направление Jп, для которого пауза после последнего обзора максимальна τп=мax(t-tjп), где t - текущее время; tiп - дата последнего обзора в каждом i-том направлении передней части сектора. Аналогично, в задней части текущего положения сектора из всех направлений в этой части сектора определяется направление Jз, для которого пауза после последнего обзора максимальна τз=мax(t-tjз), где tiз - дата последнего обзора в каждом i-том направлении задней части сектора. Исходя из этих данных, текущее направление обзора РЛС J выбирается из условия:
если τз-τп>δt, то J=Jз, иначе J=Jп;
где δt - постоянное время, за которое нормаль к плоскости ФАР поворачивается на угол, несколько меньший или равный, чем часть оборота вне сектора электронного управления лучом по азимуту.
После окончания интервала обзора в выбранном направлении J в память вычислителя записывается новая дата этого обора tJ=t, где t - дата обзора текущего интервала.
Такой выбор очередного направления обзора соответствует принятому минимаксному критерию оптимизации - минимизации периода обзора, максимального для всех направлений обзора, при текущей целевой и помеховой обстановке. Длительность пачки зондирующих импульсов, посылаемых в каждое угловое направление, принимается равной частному от деления требуемого периода обзора при отсутствии обнаружений целей и пауз, усредненного по всем угловым направлениям, на число фиксированных позиций обзора.
Поэтому всегда будут новые направления, в которых надо производить обзор, т.е. паузы в излучении будут отсутствовать в принципе. Завязка трасс в предлагаемой ВМРЛС является незамедлительной, а автосопровождения целей производится в соответствии с выбранным для этого периодом. При этом увеличение целевой и помеховой нагрузки приводит только к динамическому увеличению периодов обзора в соответствующих направлениях, без качественного нарушения указанных принципов работы ВМРЛС. Период обзора в этих направлениях или плавно увеличивается в пределах текущего сектора электронного управления лучом или скачкообразно увеличивается и переносится в сектор электронного управления лучом на следующем обороте антенны.
Важным преимуществом предлагаемого способа является то, что оптимизация времени обзора производится за счет изменения периода обзора отдельных направлений, а не за счет изменения длительности пачки зондирующих импульсов в одном направлении, как в наиболее близком аналоге, т.к. последнее сложно реализуется в современных конвейерных вычислителях первичной обработки радиолокационной информации.
В результате сравнения предлагаемого способа не только с наиболее близким аналогом, но и с другими техническими решениями в данной области техники, по мнению заявителя и авторов, заявляемый способ радиолокационного обзора пространства обладает совокупностью существенных признаков, не известных из уровня техники для объектов подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения. Так же заявляемый способ радиолокационного обзора пространства, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки. Приведенный ниже пример использования предлагаемого способа показывает соответствие его критерию «промышленной применяемости».
Пример использования предлагаемого способа.
Рассмотрим ВМРЛС со следующими характеристиками:
- период механического оборота антенны Та=5 с;
- число направлений обзора в одном круговом ряду - 86;
- число рядов направлений обзора - 9;
- постоянное время δt=4c;
-минимальный, усредненный по всем направлениям, период обзора пространства при отсутствии ложных обнаружений, целей и пауз Тобз.мин=9,29 с. Величина Тобз.мин не обязательно должна быть кратна Та;
- длительность времени пачки импульсов, излучаемых в одном направлении Тпач=9,29/(9⋅86)=0,012 с;
- сектор электронного управления лучом по азимуту ±30° относительно нормали к плоскости антенны, разбит на переднюю по направлению вращения часть от плюс 30° до минус 20° и заднюю часть от минус 20° до минус 30°. В этом случае в задней части можно провести до 12 посылок, например для 3-х завязок и 3-х срочных обзоров.
Рассмотрим звездный налет четырех групп целей, разнесенных по азимуту через 90 градусов, с одинаковым количеством целей в группах. Общее число атакующих целей Nц, число ложных засечек на один оборот антенны Nл, ложные засечки распределены по всем направлениям обзора случайным образом. На каждую ложную цель для завязки трассы тратится 3 пачки зондирующих импульсов. При сопровождении каждой цели на каждом обороте антенны симметрично в пределах сектора электронного управления лучом производится NАС посылок.
В табл. 1. приведены результаты моделирования данной обстановки и работы ВМРЛС по предлагаемому способу обзора: максимальный из всех направлений период обзора Тmах, минимальный из всех направлений период обзора Tmin, средний по всем направлениям период обзора Тcр. Кроме того, в таблице приведены доли направлений δ(1), δ(2) и δ(3), паузы между обзорами в которых составляли соответственно 1, 2 и 3 оборота антенны. Дополнительно приведены доля времени δобз, затрачиваемая на функцию обзора, и доля времени δс+з, затрачиваемая на функцию сопровождения и завязки ложных целей. 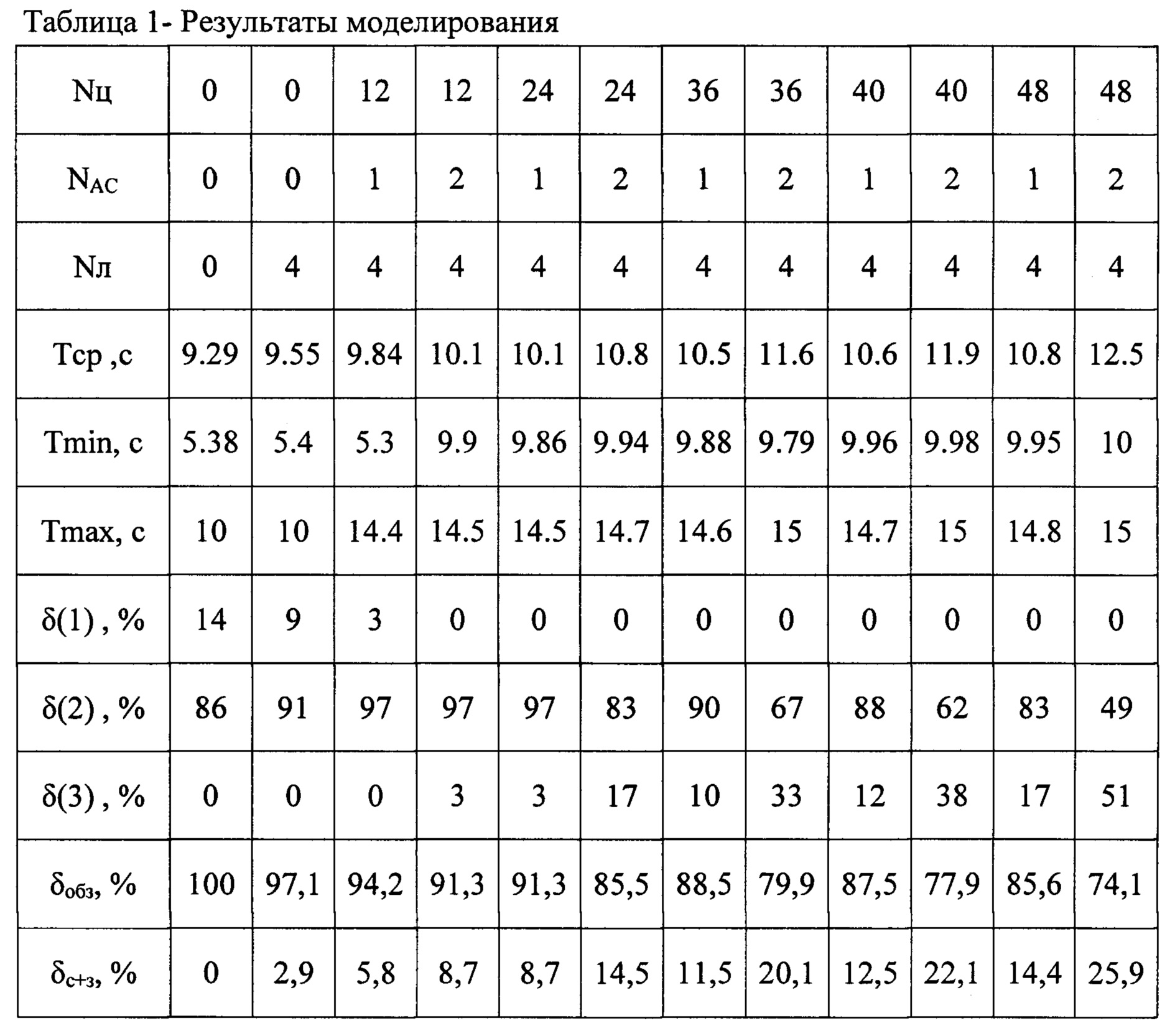
Из таблицы 1 наглядно видно, что с ростом целевой нагрузки до максимальной происходит динамическое увеличение доли направлений с большим числом оборотов антенны между обзорами, однако описанные выше свойства предлагаемого метода обзора сохраняются. В частности, приращение периодов обзора составляет не более времени одного оборота. Если по способу, взятому за прототип, принять максимальными для РЛС Nц=48 и NАС=2, то доля δобз=74,1% будет фиксирована. Тогда в случае отсутствия целей доля простоев будет (100-74,1)-2,9=23%, что настолько же увеличит период обзора по сравнению с предлагаемым способом, в котором простои отсутствуют.
Для предлагаемого способа важным показателем является также распределение проведенных обзоров в угловом секторе электронного управления лучом. Эти распределения при звездном налете 4-х групп целей показаны в виде гистограмм для трех случаев: при максимальном числе целей Nц=48, NАС=2, Nл=4 (фиг. 1); при числе целей Nц=12, NАС=2, Nл=4 (фиг. 2); при отсутствии целей Nц=0, NАС=0, Nл=4 (фиг. 3). На фигурах 1-3 по оси абсцисс -отклонение азимутального угла, на котором производится обзор, от нормали к раскрыву ФАР, в градусах, а по оси ординат - доля соответствующих случаев в процентах. Положительное значение угла соответствует передней части сектора сканирования.
Таким образом, предлагаемый способ радиолокационного обзора пространства по сравнению с известными способами позволяет увеличить скорость обзора пространства из-за исключения простоев излучения, при обеспечении быстрой завязки трасс вновь обнаруживаемых целей и их периодического сопровождения.
Направленный ответвитель
Способ измерения комплексных амплитуд возбуждения каналов фазированной антенной решетки
Способ создания комбинированной реальности при подготовке военнослужащих сухопутных войск и тренажер для его осуществления
Мини-полигон для профессиональной подготовки военных специалистов наземной артиллерии
Радиопередающая система
Полотно антенное
Способы определения точки наведения оружия на изображении фоно-целевой обстановки в стрелковых тренажерах и устройство для их осуществления
Устройство для профессионального отбора и обучения операторов систем слежения
Моноимпульсная радиолокационная станция с автоматической калибровкой
Распределенная система управления лучом
Фазированная антенная решетка с электронным сканированием в одной плоскости
Синфазный делитель мощности с неравным делением
Коаксиальная линия
Способ радиолокационного обзора пространства
Элемент активной фазированной антенной решетки отражательного типа (варианты)
Способ калибровки и поверки доплеровского радиолокатора профилей ветра
Коаксиально-волноводный переход
Возбудитель волны те
Комплексный тренажер для подготовки специалистов подразделений реактивных систем залпового огня
Коаксиальный тракт

