Результат интеллектуальной деятельности: Способ обзора пространства и сопровождения трассы цели (варианты) и радиолокационный комплекс для его осуществления (варианты)
Вид РИД
Изобретение
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных комплексах, состоящих из радиолокационных модулей (РЛМ): радиолокационных станций (РЛС) или радиолокационных приемо-передающих модулей (ППМ). Радиолокационные комплексы (РЛК) предназначены для управления воздушным движением и для контроля воздушного пространства. Необходимым условием обеспечения этого управления и контроля является знание координат всех целей, находящихся в зоне ответственности радиолокационного комплекса, с ошибками измерения местоположения целей не более 20'-40' по угловым координатам и 20-30 м по дальности. Кроме того, измеренные координаты целей при первичном обнаружении должны уточняться в процессе их движения, т.е. цели должны сопровождаться.
Для обеспечения надежного контроля всего пространства создают радиолокационные комплексы на основе РЛМ. В состав РЛК, как правило, включают РЛМ, работающие в диапазоне метровых или дециметровых волн (длинноволновые РЛМ) и обеспечивающие большие дальности обнаружения малозаметных целей. Однако длиноволновые РЛМ не обеспечивают указанную выше точность измерения угловых координат. Для улучшения точностных характеристик РЛК в его состав включают РЛМ, работающие в сантиметровом диапазоне волн, имеющие меньшую ширину луча антенны, и, соответственно, лучшие характеристики угловых точностей.
Известен способ обзора и сопровождения целей таким комплексом (патент RU 2150716), суть которого состоит в следующем. Обзор пространства и сопровождения трасс целей осуществляют с помощью РЛС1, РЛС2, …, РЛСn с длинами волн соответственно λ1>λ2>…>λn, n≥2, при этом для уточнения угловых координат целей (для разрешения целей), обнаруженных РЛС1, применяют РЛС последовательно от РЛС2, использующей данные РЛС1, до РЛСn, использующей данные РЛС(n-1). В этом случае конечная точность измерения угловых координат определяется РЛСn с наименьшей длиной волны. Безусловное обеспечение требуемой точности является преимуществом известного способа. Недостаток способа заключается в том, что временные затраты РЛСi при n≥i>1 на допоиск цели по данным РЛС(i-1) и уточнение угловых координат тем больше, чем больше угловой размер строба допоиска (т.е. чем хуже точность измерения угловых координат РЛС(i-1)). Для уменьшения этих затрат необходимо, чтобы λ(i-1) была бы близка к λi, что приведет к необходимости обеспечить n>>1, а это неприемлемо из-за усложнения и удорожания РЛК в целом. Кроме того, возрастут суммарные временные затраты РЛК, которые представляют сумму работных времен каждой РЛС комплекса. Исходя из этого целесообразным следует считать вариант с уменьшением углового размера строба допоиска за счет обеспечения приемлемой точности измерения угловых координат РЛС(i-1) при λ(i-1)>>λi.
Также известен способ радиолокационного обнаружения и сопровождения целей комплексом из двух РЛС, заключающийся в обзоре пространства длинноволновой РЛС и передаче информации о дальности до цели и ее угловых координатах коротковолновой РЛС, в определении точной угловой координаты в плоскости пространственного разноса РЛС трилатерационным методом (Справочник по радиолокации. Под ред. М. Скольника, т. 4. М., «Сов. Радио», 1977, с. 212, 6 абз. сверху) из соотношения сторон треугольника, образованного измеренными каждой РЛС дальностями и известным расстоянием между РЛС (патент RU 2099738). Недостатки способа заключены, во-первых, в том, что нужно вести сопровождение целей при одновременном (согласованном) ее сопровождении двумя РЛС, что исключает возможность независимого сопровождения ими целей, а это усложняет управление комплексом, а, во-вторых, коротковолновая РЛС, как правило, имеет меньшую дальность обнаружения, чем эквивалентная длинноволновая.
Наиболее близким к заявляемому способу является способ обзора пространства и сопровождения трасс целей, основанный на обнаружении цели в режиме обзора и выработке стробов сопровождения трасс целей (С.З. Кузьмин «Основы проектирования систем цифровой обработки радиолокационной информации», М., «Радио и связь», 1986, с. 109, с. 115, 1 абз. сверху).
Известен РЛК, который реализует наиболее близкий способ. РЛК состоит из n≥2 приемо-передающих модулей (ППМ) и модуля обработки (МО), входы-выходы ППМ соединены с выходами-входами МО. Один из выходов МО является выходом РЛК. Часть ППМ работают на длине волны λk (ППМk), а остальные - на длинах волн λd>λk (ППМd), и входы ППМk соединены с дополнительными выходами МО (патент RU 2145093). При реализации известного способа радиолокационный комплекс работает следующим образом.
Несколько ППМd независимо друг от друга ведут сопровождение трасс целей, вырабатывая стробы сопровождения целей в нем на следующем обзоре. Размер строба определяют исходя из возможных ошибок при экстраполяции и измерении координат целей (там же, с. 109, с 115, 1 абз. сверху). Для увеличения вероятности попадания отметки от цели в строб при следующем обзоре (в противном случае трасса может быть сброшена) можно было бы увеличить размер строба по сравнению с расчетным. Однако увеличение размера строба приводит к увеличению вероятности попадания в данный строб ложных отметок или отметок, принадлежащих другим траекториям, следовательно, к ухудшению селектирующей и разрешающей способности операции стробирования (B.C. Черняк. «Многопозиционная радиолокация». М., «Радио и связь», 1993. с. 114, строки 13…9 снизу). Недостаток известного способа обзора пространства и сопровождения трасс целей при его реализации известным РЛК состоит в необходимости формирования стробов сопровождения больших размеров, зависящих от ширины луча антенны, что особенно важно при сопровождении целей длинноволновыми радиолокационными средствами, имеющими широкие лучи антенны; при этом большие ошибки при измерении угловых координат целей будут определять размеры стробов.
Решаемой технической проблемой заявляемого изобретения (техническим результатом) является обеспечение возможности при независимом сопровождении целей радиолокационными средствами с широкими лучами антенн, входящими в РЛК, формировать строб сопровождения минимального размера, независимого от ширины луча.
Техническая проблема решается на основе использования трилатерационного метода при пространственном разносе РЛМ (РЛС или ППМ) в РЛК и может решаться двумя способами.
Заявленный технический результат по первому варианту заявляемого способа обзора пространства (п. 1 формулы изобретения) достигается тем, что в способе обзора пространства и сопровождения трасс целей, основанном на обнаружении цели в режиме обзора, на выработке стробов сопровождения трасс целей согласно изобретению обзор пространства и сопровождение трассы цели выполняют с помощь n≥s≥2 радиолокационных модулей, входящих в радиолокационный комплекс, состоящий из n≥2 РЛМ, при этом РЛМ обмениваются параметрами трасс сопровождаемых ими целей, привязанными к единому времени, вычисляют угловые координаты целей в плоскости пространственного разноса РЛМ из соотношения сторон треугольника, образованного измеренными дальностями, извлекаемыми из сопровождаемых трасс, и известного пространственного разноса РЛМ между собой и устанавливают размер строба в плоскости пространственного разноса РЛМ на основе вычисленного значения угловых координат.
Также тем, что в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Тем, что в радиолокационном комплексе для обзора пространства, обнаружения и сопровождения трасс целей, состоящий из n≥2 радиолокационных модулей и модуля обработки, входы-выходы РЛМ соединены с выходами-входами МО, а один из выходов МО является выходом РЛК, согласно изобретению входы-выходы каждого из n≥s≥2 РЛМ взаимно соединены с выходами-входами.
Также тем, что РЛМ размещают в пространстве с разносом, определяемым заданной точностью измерения угловых координат целей в плоскости разноса трилатератционным методом.
Также тем, что часть РЛМ выполнены с длиной волны λk, а остальные - с длинами волн λd>λk.
Тем, что в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Заявленные технический результат по второму варианту заявляемого способа (п. 7 формулы изобретения) достигается тем, что в способе обзора пространства и сопровождения трасс целей, основанном на обнаружении целей в режиме обзора, на выработке стробов сопровождения трасс целей согласно изобретению, обзор пространства выполняют с помощью n≥s≥2 радиолокационных модулей, входящих в радиолокационный комплекс, состоящий из n≥2 РЛМ и модуля обработки, а в МО по данным РЛМ выполняют сопровождение трасс целей и вычисляют их угловые координаты в плоскости пространственного разноса РЛМ из соотношения сторон треугольника, образованного измеренными дальностями до целей и известным пространственным разносом РЛМ, дальности от РЛМ до целей извлекают из информации о прокладываемых для каждого РЛМ трасс целей и устанавливают размер строба в плоскости пространственного разноса РЛМ на основе вычисленного значения угловой координаты.
Также тем, что в радиолокационном комплексе в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Тем, что в радиолокационном комплексе для обзора пространства, обнаружения и сопровождения трасс целей, состоящем из n≥2 радиолокационных модулей и модуля обработки (МО), входы-выходы РЛМ соединены с выходами-входами МО, а один из выходов МО является выходом РЛК, согласно изобретению РЛМ размещают в пространстве с разносом, определяемым заданной точностью измерения угловых координат в плоскости разноса трилатерационным методом.
Также тем, что часть РЛМ выполнены с длиной волны λk, а остальные - с длинами волн λd>λk.
Также тем, что в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
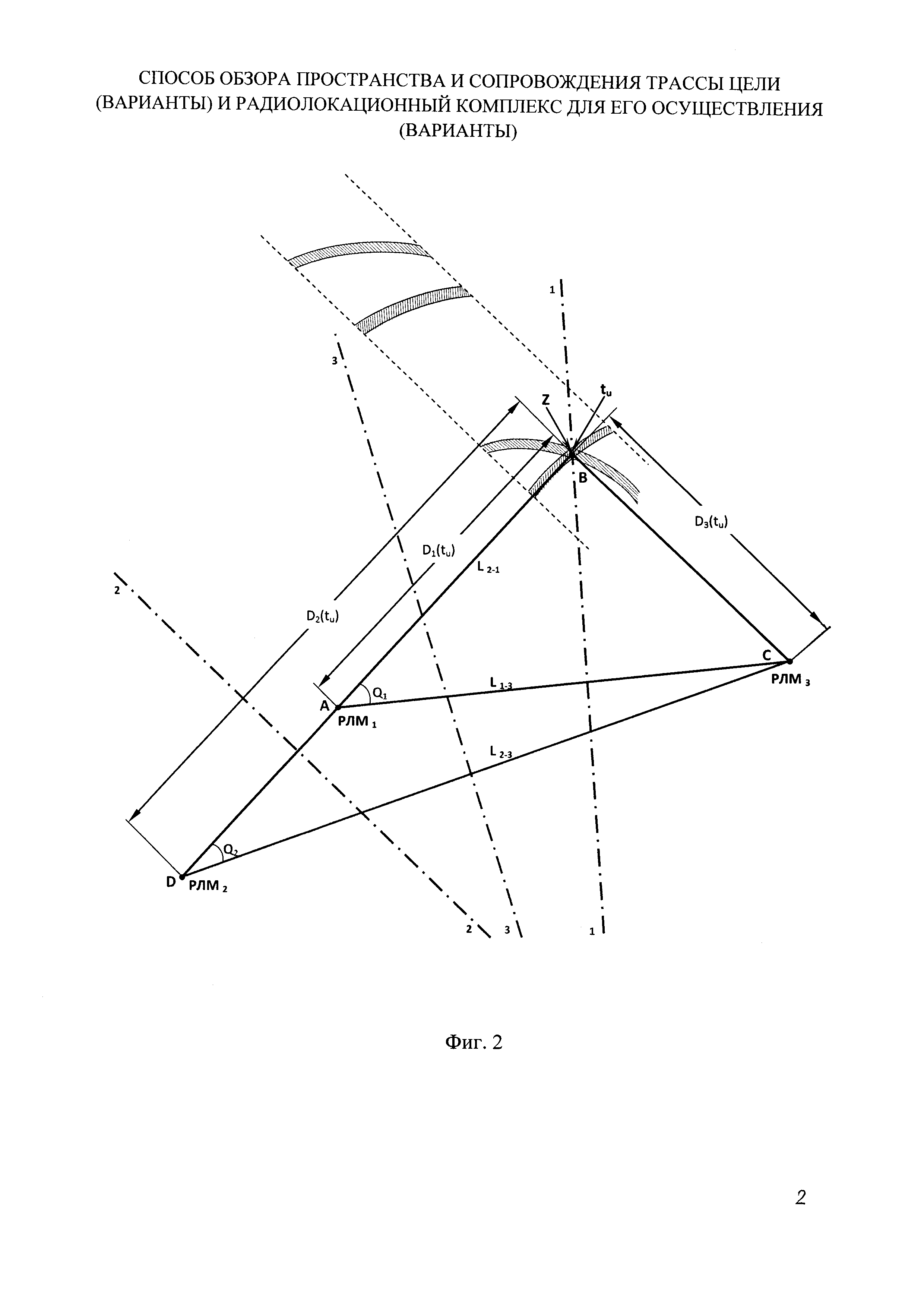
Суть заявляемых способов проще пояснить графически (фиг. 1 и 2). На фиг. 1 для примера приведены графические изображения трасс (полосы, ограниченные пунктирными линиями) прокладываемые тремя РЛМ (РЛМ1, РЛМ2, РЛМ3, соответственно фиг. 1а, 1б, 1в). Ширина полос характеризует область ошибок при измерении угловых координат (азимута для рассматриваемого случая), причем ширина полос для примера взята различная, что характеризует условно различную ширину луча антенн РЛМ1, РЛМ2, РЛМ3. На трассах изображены дугообразные полоски, обозначенные индексом вида  , это r-й интервал времени контакта РЛМf с целью; ширина полосок определяется областью ошибок при измерении дальности до цели. Поскольку прокладку трасс целей осуществляют с помощью РЛМ1, РЛМ2, РЛМ3 независимо (на каждом из них или в МО), то в общем случае интервалы времени
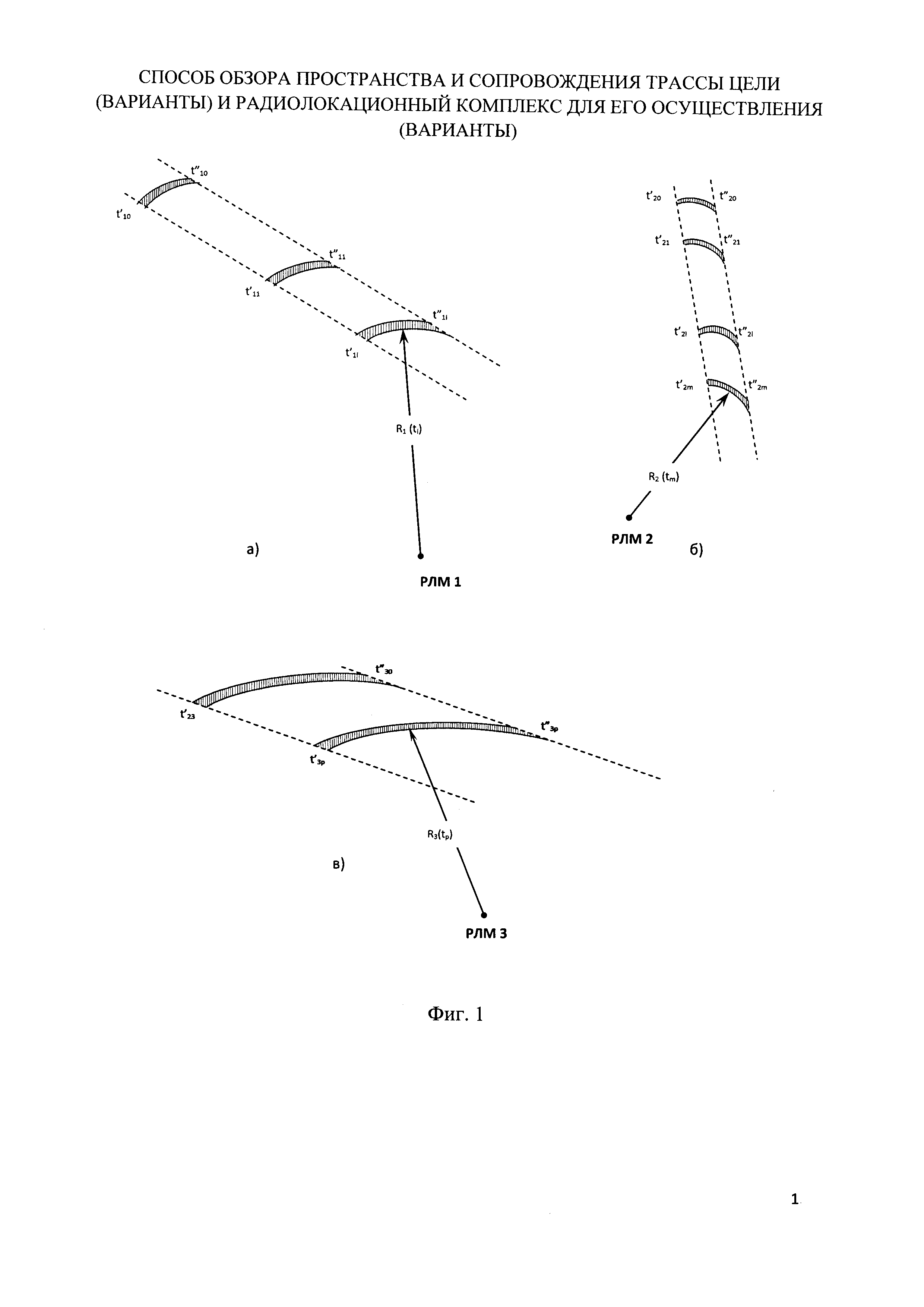
, это r-й интервал времени контакта РЛМf с целью; ширина полосок определяется областью ошибок при измерении дальности до цели. Поскольку прокладку трасс целей осуществляют с помощью РЛМ1, РЛМ2, РЛМ3 независимо (на каждом из них или в МО), то в общем случае интервалы времени  контакта с целью для различных ƒ не совпадают; могут не совпадать и периоды повторения интервалов времени контакта РЛМ (на фиг. 1 число полосок условно показано различным). Дугообразные полоски на изображениях трасс - это условно совокупность отраженных от целей сигналов на одной дальности и распределенных по азимуту за счет вращения антенны. Поскольку РЛМ1, РЛМ2, РЛМ3 имеют единое время, то проложенные трассы, привязанные к положению соответствующего РЛМ, могут быть совмещены с сохранением этой привязки, что и изображено на фиг. 2. Используя совмещенные трассы, полученные относительно положения РЛМ1, РЛМ2, РЛМ3, можно определить угловые координаты целей для любого момента времени в интервале существования трасс. Рассмотрим вариант определения угловых координат цели Z в момент времени tu, для которого из трасс, проложенных с помощью РЛМ1, РЛМ2, РЛМ3, определены дальности до цели соответственно D1(tu), D2(tu), D3(tu). Из ΔАВС с известными сторонами (D1(tu), D3(tu) и L1-3 - база между РЛМ1 и РЛМ2, может быть вычислен угол θ1, а из ΔDBC(D2(tu), D3(tu) и L2-3 - база между РЛМ2 и РЛМ3)-угол θ2. Цель Z расположена в пересечении областей ошибок измерения ее координат с помощью РЛМ1 и РЛМ2; размеры их определяются среднеквадратической ошибкой (СКО) измерения дальности, но главным образом - угла, а размер области пересечения зависти, в основном от СКО измерения дальности. Из чертежа видно, что по данным РЛМ1 и РЛМ2 угловую координату цели Z в момент времени tu определить невозможно, поскольку цель Z, РЛМ1 и РЛМ2 находятся на одной линии и при этом эффективная база L2-1эфф=0 [3] (см. с. 17-19). СКО определения угловой координаты σθ на основе измерения дальностей из разнесенных точек, извлекаемых в рассматриваемом случае (для заявляемых способов) из совмещенных трасс, проложенных с помощью двух РЛМ, может быть оценена из выражения (там же).
контакта с целью для различных ƒ не совпадают; могут не совпадать и периоды повторения интервалов времени контакта РЛМ (на фиг. 1 число полосок условно показано различным). Дугообразные полоски на изображениях трасс - это условно совокупность отраженных от целей сигналов на одной дальности и распределенных по азимуту за счет вращения антенны. Поскольку РЛМ1, РЛМ2, РЛМ3 имеют единое время, то проложенные трассы, привязанные к положению соответствующего РЛМ, могут быть совмещены с сохранением этой привязки, что и изображено на фиг. 2. Используя совмещенные трассы, полученные относительно положения РЛМ1, РЛМ2, РЛМ3, можно определить угловые координаты целей для любого момента времени в интервале существования трасс. Рассмотрим вариант определения угловых координат цели Z в момент времени tu, для которого из трасс, проложенных с помощью РЛМ1, РЛМ2, РЛМ3, определены дальности до цели соответственно D1(tu), D2(tu), D3(tu). Из ΔАВС с известными сторонами (D1(tu), D3(tu) и L1-3 - база между РЛМ1 и РЛМ2, может быть вычислен угол θ1, а из ΔDBC(D2(tu), D3(tu) и L2-3 - база между РЛМ2 и РЛМ3)-угол θ2. Цель Z расположена в пересечении областей ошибок измерения ее координат с помощью РЛМ1 и РЛМ2; размеры их определяются среднеквадратической ошибкой (СКО) измерения дальности, но главным образом - угла, а размер области пересечения зависти, в основном от СКО измерения дальности. Из чертежа видно, что по данным РЛМ1 и РЛМ2 угловую координату цели Z в момент времени tu определить невозможно, поскольку цель Z, РЛМ1 и РЛМ2 находятся на одной линии и при этом эффективная база L2-1эфф=0 [3] (см. с. 17-19). СКО определения угловой координаты σθ на основе измерения дальностей из разнесенных точек, извлекаемых в рассматриваемом случае (для заявляемых способов) из совмещенных трасс, проложенных с помощью двух РЛМ, может быть оценена из выражения (там же).

σD - СКО измерения дальности с помощью каждого РЛМ (полагаем, что их СКО одинаковы);
Lэфф=L×sinθ - эффективная база;
L - база между РЛМ;
θ - угол, определяющий направление на цель.
Наибольшая точность измерения угловой координаты для фиксированного значения L достигается для направлений, близких к нормали к базе. Поэтому для направления на цель Z в момент времени tu (направление 1-1) наибольшая точность измерения угла будет за счет использования РЛМ1 и РЛМ3 при базе L1-3 (аналогичная точность может быть получена и при использовании РЛМ2 и РЛМ3, но при этом L2-3>L1-3). Наибольшая эффективность использования пар РЛМ1 - РЛМ2 и РЛМ2 - РЛМ3 будет соответственно для направления 2-2 и 3-3. При s>2 выбирают трассы от тех РЛМ, которые для направления на цель имеют наибольший разнос; поэтому РЛМ располагают таким образом, чтобы в ответственных направлениях располагались пары РЛМ с наибольшим значением Lэфф. Как видно из (1), получаемая при этом точность вычисления угловой координаты цели зависит от погрешности измерения дальности и величины пространственного разноса РЛМ. А точность измерения дальности может быть обеспечена необходимой шириной спектра сигнала. Это дает возможность, в т.ч. для длинноволновых РЛМ, входящих в РЛК, обеспечивать высокую точность измерения угловых координат и позволяет минимизировать размер строба сопровождения независимо от ширины луча. Известно (там же, стр. 18), что использование свойства разнесенных точек измерения дальности до цели сохраняет высокую точность определения местоположения цели при использовании слабонаправленных антенн.
Заявляемые способы по первому и второму вариантам отличаются тем, что по первому варианту прокладку трасс цели и их совмещение выполняют в каждом из s≥2 РЛМ, а по второму варианту - в МО по данным РЛМ-.
Различия способов по первому (п. 1 формулы) и второму (п. 7 формулы) вариантам привели к различиям в структуре РЛК (п. 3 и п. 9 формулы соответственно): для обеспечения обмена информацией о параметрах трассы РЛМ в РЛК по п. 3 формулы входы-выходы каждого их n≥s≥2 РЛМ взаимно соединены с выходами-входами, для РЛК по п. 9 формулы этого не требуется, т.к. в способе по п. 6 формулы трассы цели относительно положения РЛМ прокладывают в МО по данным, полученным от РЛМ.
В РЛК по п. 3 и п. 7 формулы предусмотрен пространственный разнос РЛМ (ППМ) исходя из требуемой точности измерения угловой координаты цели в плоскости разноса в наиболее ответственном направлении для формирования строба сопровождения с минимальными размерами в соответствии с (1). Если таких направлений несколько, то РЛК должен содержать s>2 РЛМ.
А РЛК по п. 3 и п. 9 формулы РЛМ могут выполняться, как и в прототипе, в разных диапазонах волн.
Таким образом, заявленные способы и РЛК их реализующие, за счет измерения угловой координаты с использованием пространственного разноса независимо друг от друга сопровождающих цель РЛМ (ППМ), входящих в РЛК, обеспечивают возможность формирования строба сопровождения цели минимального размера, независимо от ширины луча антенны, чем и решается поставленная задача изобретения и достигается технический результат.
Способ борьбы с задержками передачи данных автоматизированных систем управления
Высоковольтное устройство электропитания радиопередатчика
Витковый взрывомагнитный генератор
Беспилотный летательный аппарат-перехватчик
Способ распознавания ложной траектории, формируемой синхронной ответной помехой
Способ определения дальности до постановщика импульсной помехи (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ распознавания ложных сигналов
Способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления
Способ радиолокационного обзора пространства
Способ двухэтапного радиолокационного обзора пространства (варианты)
Способ сопровождения цели и способ излучения и приема сигнала
Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления
Способ радиолокационного обзора пространства (варианты)

