Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ СИСТЕМ
Вид РИД
Изобретение
Общая область техники и уровень техники
Настоящее изобретение относится к дистанционно управляемым системам, таким как воздушные или наземные беспилотные аппараты.
Дистанционно управляемые системы снабжены линиями передачи данных, которые являются либо внутренними линиями передачи данных, которые полностью контролирует удаленный оператор, либо линиями передачи данных, внешних относительно удаленного оператора (например, SATCOM).
В случае внешней линии передачи данных контролируется не вся линия.
В настоящее время только использование внутренней линии передачи данных позволяет удаленному оператору гарантировать целостность информации, передаваемой на дистанционно управляемый аппарат, и координировать всю систему.
Однако такая координация требует развертывания значительных средств и может оказаться слишком дорогой.
В частности, дистанционно управляемые системы все чаще должны выполнять свою задачу автоматически, используя алгоритмы навигации, потенциально очень изменчивые и не обязательно детерминистские (или сходимость которых не является осевидной), основанные на данных, поступающих от множества датчиков.
Интерфейсы операторов на земле являются сложными и потенциально разнородными (в большинстве случаев эти интерфейсы/носители не координируются).
Главной задачей изобретения является решение этих проблем, и оно призвано предложить архитектуру, обеспечивающую координацию цепи контроля и управления с меньшими затратами.
В частности, удаленный оператор, осуществляющий действительный контроль управляемого аппарата, должен контролировать параметры безопасности полета и, в частности:
- контролировать траекторию аппарата (не допускать выхода из его зоны действия),
- контролировать зону падения в случае неисправности двигателя или «crash» (разумеется, следует избегать любого неконтролируемого падения, чтобы избегать несчастных случаев в запрещенных зонах, таких как зоны густой населенности, и обеспечивать в случае появления проблем оптимизацию посадки в более надлежащих зонах),
- непрерывно отслеживать состояние различных блоков, отвечающих за безопасность полета (энергия, движение, контрольные связи, навигация,…).
Раскрытие изобретения
В связи с этим изобретением предложена дистанционно управляемая система, содержащая:
- по меньшей мере один наземный интерфейс, при помощи которого оператор может управлять дистанционно управляемым аппаратом,
- по меньшей мере один блок выполнения задачи в указанном аппарате,
- линию передачи данных между указанным интерфейсом и указанным блоком выполнения задачи,
отличающаяся тем, что содержит на земле и в аппарате системы контроля безопасности, выполненные с возможностью подписания и/или аутентификации данных и/или критических команд, обмениваемых между землей и аппаратом, и/или с возможностью проверки целостности этих данных, и тем, что одна из систем контроля безопасности в аппарате выполнена с возможностью проверять, удерживается ли дистанционно управляемый аппарат в обозначаемом с земли заранее определенном безопасном секторе, и запускать заранее определенное действие, если это не так.
Аутентификация и подписание данных позволяют удаленному оператору получить средства, гарантирующие прием команд на борту, и информацию, используемую для принятия решения (положение самолета, состояние критических узлов).
Проверка целостности позволяет гарантировать, что команды, передаваемые удаленным оператором, а также информация, которую он получает, не претерпели изменений в цепи передачи.
Таким образом, на земле, а также на борту аппарата можно использовать интерфейсы и блоки выполнения задачи с низким уровнем критичности одновременно с интерфейсами и блоками выполнения задачи с более высоким уровнем критичности.
В возможном варианте изобретения предусмотрена независимая защищенная цепь линий передачи данных для обеспечения запуска с земли заранее определенного защищенного действия.
В еще одном варианте система контроля безопасности аппарата выполнена с возможностью приема последовательности простых команд, поступающих от пункта воздушного контроля.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве не ограничительного примера, со ссылками на прилагаемые фигуры, на которых:
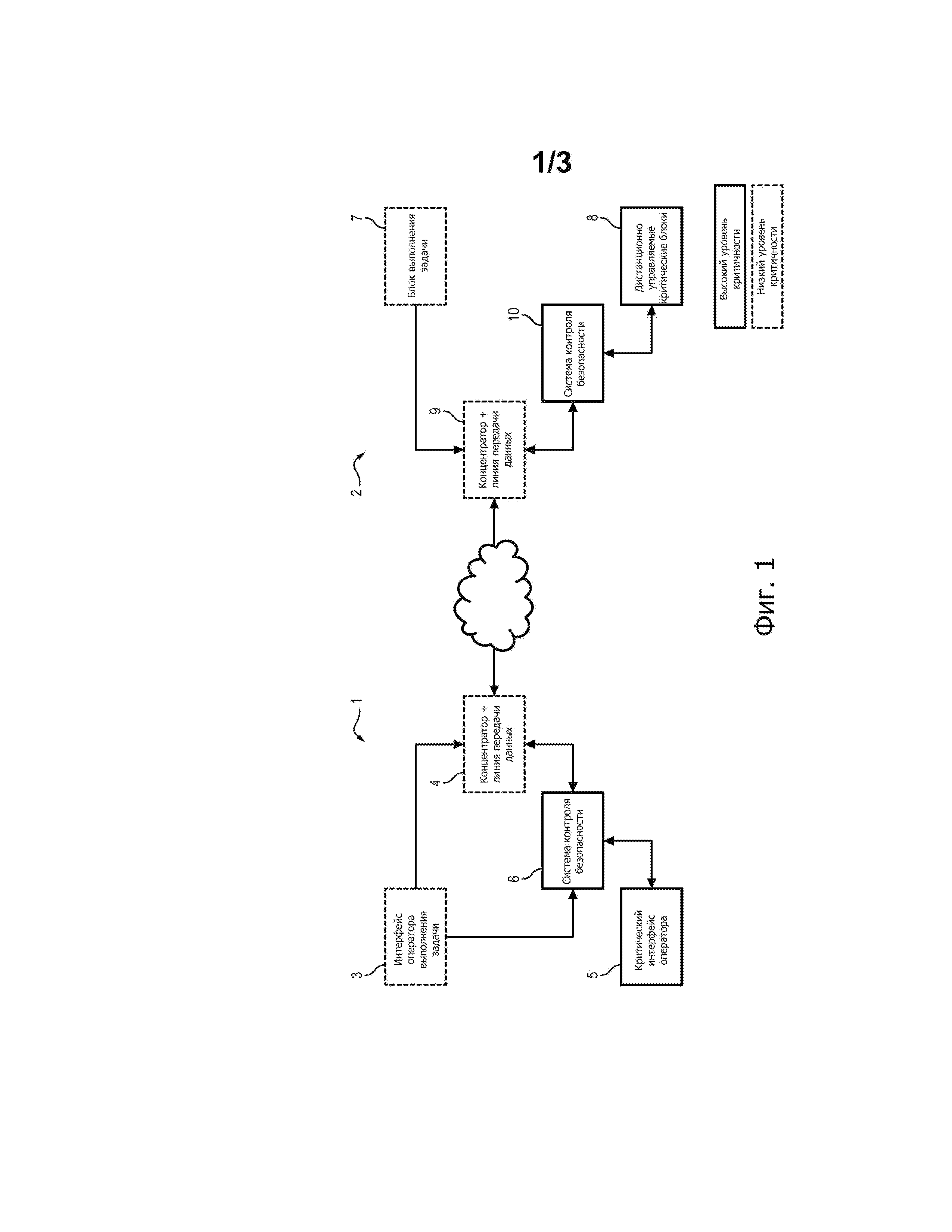
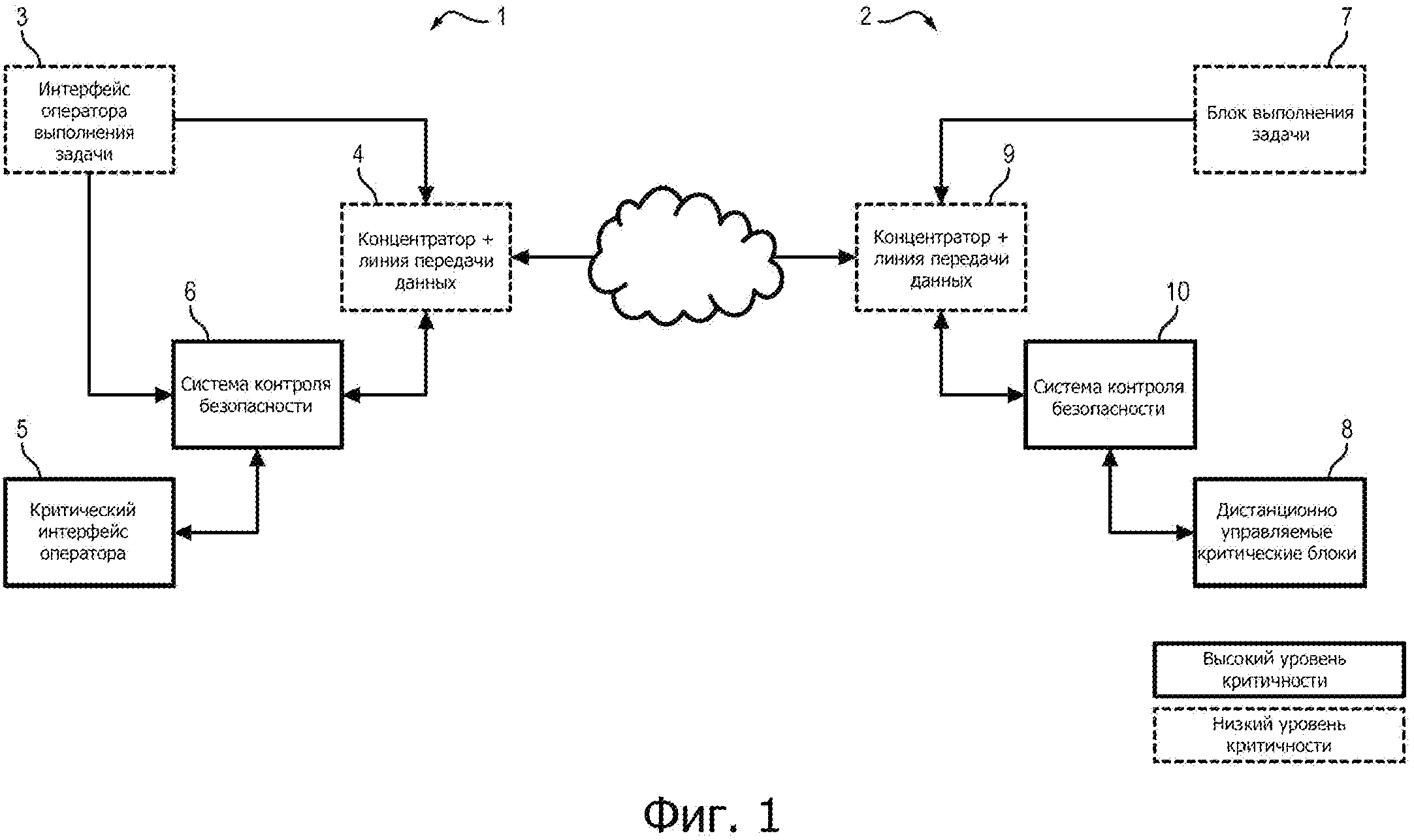
Фиг. 1 - принципиальная схема возможного варианта осуществления изобретения.
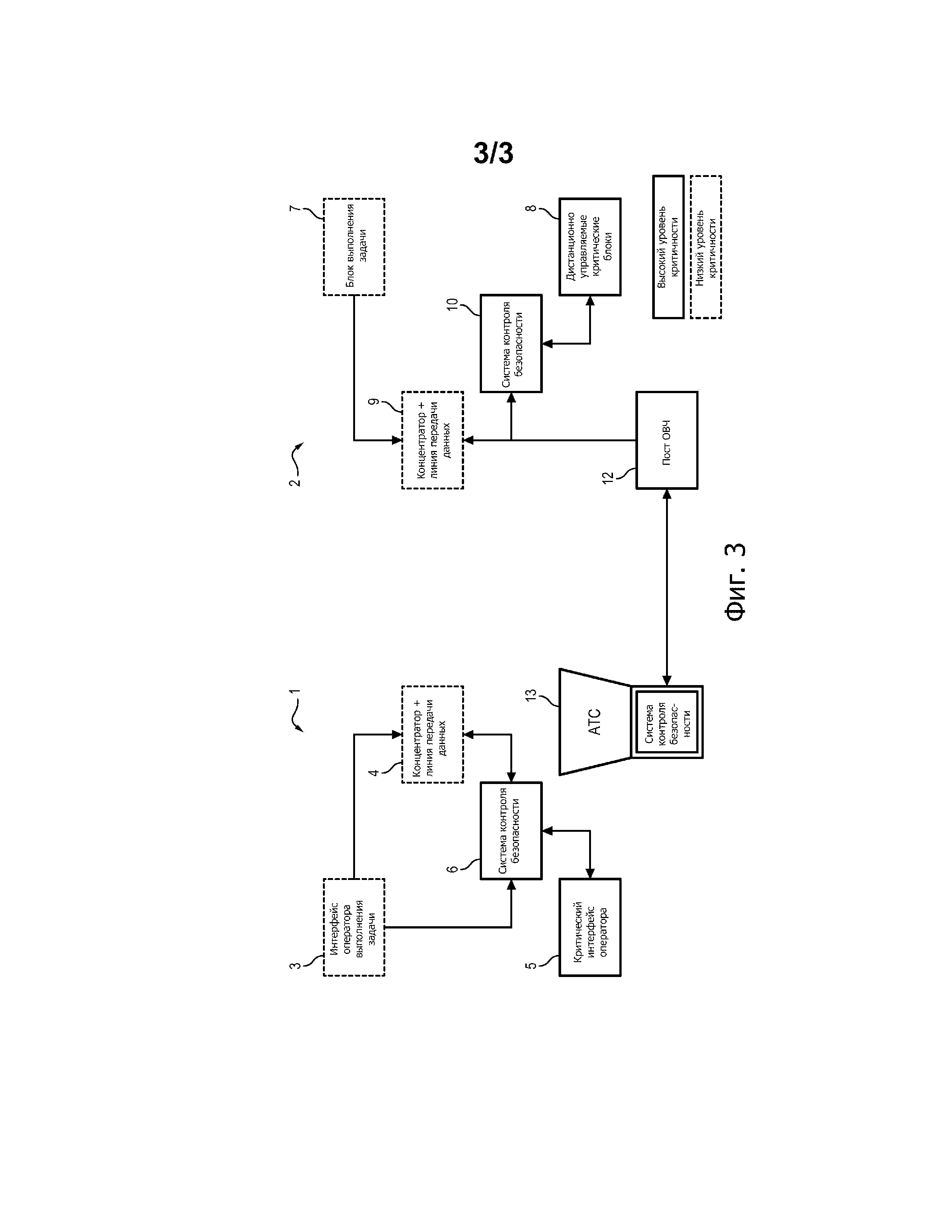
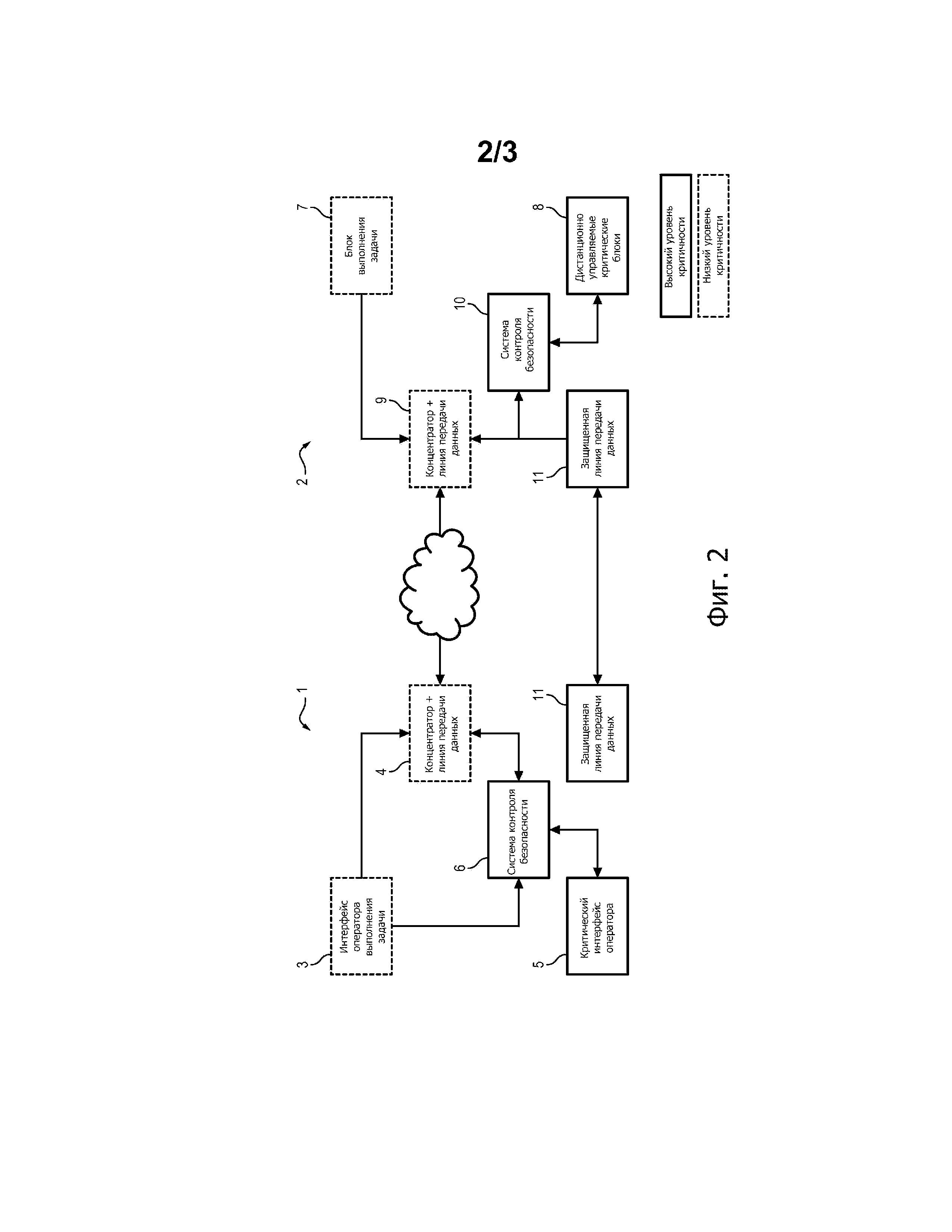
Фиг. 2 и 3 - два других возможных варианта осуществления изобретения.
Осуществление изобретения
Архитектура, представленная на фиг. 1, включает в себя наземную часть 1 и часть 2 для дистанционно управляемого аппарата.
На земле архитектура содержит по меньшей мере один интерфейс 3, при помощи которого оператор может управлять дистанционно управляемым аппаратом, концентратор 4, позволяющий обеспечивать линию передачи данных для связи с аппаратом, а также интерфейс 5, который имеет более высокий уровень критичности (DAL или “Development Assurance Level” согласно англо-саксонской терминологии), чем интерфейс 3 и концентратор 4.
На земле предусмотрена система 6 контроля безопасности. Эта система тоже имеет повышенный уровень критичности и выполняет следующие функции:
- она подписывает критические команды, передаваемые одним или другим из интерфейсов 3 и 5 на аппарат (применение шифрования);
- она проверяет целостность данных состояния, регулярно получаемых с борта (положение, состояние оборудования и т.д.). Проверка целостности одновременно происходит в пространстве и во времени. При этом система классифицирует поступающие с борта данные состояния по трем состояниям: функциональному, деградированному, нерабочему;
- она проверяет когерентность между командой, переданной на борт, и ответом на команду, переданным с борта критическим блоком аппарата;
- она регулярно передает на борт запросы аутентификации (применение функции вызова);
- она копирует заданные значения, передаваемые интерфейсом 5 выполнения задачи на борт, чтобы их контролировать (короткий контур защиты).
Аналогичная архитектура предусмотрена также на борту аппарата. Для этого он содержит один или несколько блоков 7 выполнения задачи с низким уровнем критичности, один или несколько блоков 8 выполнения задачи с высоким уровнем критичности, концентратор 9, обеспечивающий линию связи с землей, и систему 10 безопасности.
Эта система 10 контроля безопасности тоже имеет высокий уровень критичности и осуществляет следующие виды контроля:
- она передает в критический блок 8 команду, поступающую с земли, после ее декодирования;
- она проверяет целостность этой команды до ее передачи в критический блок 8;
- она регулярно передает в наземные интерфейсы 3 и 5 запросы аутентификации (функция вызова);
- она проверяет временную достоверность поступающих с земли команд (устаревание);
- она передает на землю подтверждение о получении заданных значений дистанционно управляемым критическим блоком 8;
- она подписывает данные контроля и состояния, поступающие от дистанционно управляемого критического блока 8.
В данном случае следует отметить, что компоненты и алгоритмы, подписывающие команды, направляемые с земли, и подписывающие данные контроля, направляемые с борта, являются идентичными.
При этом применяют ключи с высокой степенью защиты и надежные математические алгоритмы, чтобы вероятность получения не обнаруживаемых ошибочных команд/состояний была как можно ниже (ниже уровня, эквивалентного обслуживаемой функции).
Различные используемые блоки обработки содержат точный внутренний тактовый синхронизатор, устанавливаемый по одинаковому опорному времени. Тактовый синхронизатор этих блоков выбирают надежным относительно ухода от опорного времени.
Кроме того, система 10 безопасности аппарата может проверять, удерживается ли аппарат в обозначаемом с земли заранее определенном безопасном секторе (трехмерная зона, критическое состояние…).
Дистанционно управляемый аппарат содержит навигационную систему, включающую в себя приемник спутникового позиционирования (например, типа GPS) и инерциальный счетчик текущих координат.
Дистанционно управляемый аппарат содержит также модуль обработки, выполненный с возможностью определять на основании сигналов положения, генерируемых навигационной системой и инерциальным счетчиком текущих координат, данные моментального положения аппарата. Данные положения аппарата включают в себя данные, характеризующие моментальные пространственные координаты аппарата (широта, долгота и высота), а также, возможно, безопасный радиус. Безопасный радиус определяет объем вокруг положения, определяемого моментальными координатами, в котором находится аппарат, с учетом погрешностей измерения.
Модуль обработки передает данные положения аппарата в систему 10 контроля безопасности.
Система 10 контроля безопасности сравнивает данные положения, поступающие от модуля обработки, с данными, характеризующими определенный безопасный сектор и передаваемыми с земли.
В случае, когда команды, поступающие с борта, или состояния критического блока 8 не соответствуют этому безопасному сектору, система 10 запускает заранее определенное действие (например, изолирование от внешних команд и/или применение правил безопасности).
Данные, характеризующие безопасный сектор, могут содержать диапазоны широты, долготы и высоты, в которых должен находиться дистанционно управляемый аппарат.
Согласно первому варианту, безопасный радиус вычисляют при помощи модуля обработки, находящегося на борту аппарата.
В этом случае модуль обработки передает безопасный радиус в систему 10 контроля безопасности на борту аппарата вместе с данными положения.
Данные положения, включая безопасный радиус, передаются системой 10 контроля безопасности в систему 6 контроля безопасности, находящуюся на земле.
В ответ наземная система 6 контроля безопасности передает в бортовую систему 10 контроля безопасности данные, характеризующие безопасный сектор, чтобы бортовая система 10 контроля безопасности могла проверить, что дистанционно управляемый аппарат удерживается в безопасном секторе.
Безопасный сектор можно определять на земле на основании данных положения, передаваемых бортовой системой 10 контроля безопасности. Данные положения аппарата и данные, характеризующие безопасный сектор, обмениваемые между землей и аппаратом, подписываются системой контроля передатчика и аутентифицируются системой контроля приемника.
Согласно второму варианту, безопасный радиус вычисляют при помощи модуля обработки, находящегося на земле.
Этот второй вариант можно применять, в частности, если вычисление защитного радиуса должно учитывать тот факт, что один или два спутника GNSS могут выйти из строя. Это вычисление требует использования сложной системы обработки, включающей в себя обширный банк фильтров, которую лучше разместить на земле, где имеющиеся в наличии средства не имеют таких ограничений, как средства, устанавливаемые на борту аппарата, и могут обслуживать несколько аппаратов одновременно.
В этом случае бортовая система 10 контроля безопасности передает пространственные координаты аппарата в наземную систему 6 контроля безопасности.
Находящийся на земле модуль обработки вычисляет безопасный радиус в зависимости от моментальных пространственных координат аппарата (широта, долгота и высота, данные GNSS расстояния до различных видимых спутников), а также данные, характеризующие безопасный сектор.
Наземная система 6 контроля безопасности передает в бортовую систему 10 контроля безопасности данные, характеризующие безопасный радиус и безопасный сектор, чтобы бортовая система 10 контроля безопасности могла проверить, что дистанционно управляемый аппарат удерживается в безопасном секторе.
Данные положения аппарата и данные, характеризующие безопасный радиус и безопасный сектор, обмениваемые между землей и аппаратом, подписываются системой контроля передатчика и аутентифицируются системой контроля приемника.
В еще одном варианте (фиг. 2 - специальная аварийная цепь системы) система 10 может принимать простую команду (типа дискретной от независимой защищенной цепи 11 линии передачи данных). В этом случае система запускает заранее определенное действие (например: изолирование от внешних команд и/или применение правил безопасности).
В третьем варианте (фиг. 3 - переход управления на пункт воздушного контроля) в случае потери контроля (случайной или намеренной) со стороны станции контроля система безопасности аппарата может принимать последовательность простых команд от пункта воздушного контроля (пост АТС 13) через связь «ОВЧ» (пост 12).
Аутентичность этих команд проверяют при помощи механизма подписания на основе ключей, которыми предварительно обмениваются АТС и удаленный оператор.
Устройство определения местоположения цели посредством коррекции по звезде, предназначенное для установки на подвижном носителе
Привод с пассивной блокировкой
Индуктивный датчик тока
Привод, оснащенный системой no back с зоной блокировки
Рукоятка для удержания оружия и оружие, содержащее такую рукоятку
Способ мониторинга устройства типа электромеханического привода
Телескоп с упрощенным монтажом
Телескоп с улучшенными характеристиками и с упрощенным монтажом
Телескоп с упрощенным монтажом и способ регулирования такого телескопа

