Результат интеллектуальной деятельности: УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИИ ЦЕЛЕЙ ПО ДАЛЬНОСТИ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС), работающих с высокой частотой повторения (ВЧП) импульсов. Достигаемым техническим результатом для РЛС, решающих задачу разрешения высокоскоростных целей, является увеличение отношения сигнал-шум (ОСШ), повышение разрешающей способности по дальности и скорости.
Указанный результат достигается тем, что после внутрипериодной согласованной обработки принятых сигналов в каждом периоде повторения выполняется компенсация временного сдвига эхосигнала, обусловленного движением цели.
В современных ИД РЛС в качестве зондирующих сигналов используются когерентные последовательности импульсов. Важнейшей операцией при обработке принятых сигналов является выделение из их спектра доплеровских частотных составляющих. За счет когерентного накопления энергии отраженных сигналов в узкополосных доплеровских фильтрах достигается большая дальность обнаружения движущихся целей. Высокая частота повторения импульсов позволяет однозначно обнаруживать движущиеся цели с одновременным разрешением их по дальности и скорости в области доплеровских частот [1].
Известно устройство обработки сигналов в ИД РЛС, выполняющее операции согласования опорного сигнала с сигналом, отраженным от цели, в два этапа: на первом этапе выполняется согласование во временной области путем стробирования видеоимпульсами сигналов по дальности, а на втором - согласование по доплеровским частотам путем введения набора узкополосных доплеровских фильтров, выполняющих роль интеграторов, с выходов которых сигналы через амплитудный детектор, пороговое устройство и оперативное запоминающее устройство поступают на процессор обработки сигналов и далее на процессор обработки данных [1, стр. 322-324].
Известна ИД РЛС, приемный тракт которой выполнен по традиционной схеме супергетеродинных приемников, выходные сигналы которого в цифровом виде поступают в процессор РЛС, осуществляющий обнаружение целей и измерение их координат [2, стр. 235-248]. В каждом канале дальности с помощью цифрового фильтра выполняется частотная селекция области, свободной от мешающих отражений, и доплеровская фильтрация принимаемых сигналов с помощью эффективного алгоритма быстрого преобразования Фурье (БПФ). После операции БПФ осуществляется формирование модуля выходного сигнала фильтров доплеровской селекции, который поступает на пороговую схему для сравнения с порогом обнаружения. Далее производится оценка доплеровского смещения частоты и дальности до цели.
Недостатком этих систем и устройств является снижение потенциально достижимого ОСШ и ухудшение разрешения по дальности и скорости целей, движущихся с высокими радиальными скоростями.
Наиболее близким по технической сущности аналогом заявляемого изобретения, принятым за прототип, является устройство, реализующее метод цифровой обработки сигналов (ЦОС) в ИД РЛС, структурная схема которого представлена в [3].
В указанном методе с помощью цифрового формирования квадратурных составляющих осуществляют вычисление комплексной огибающей (КО) сигналов, поступающих с выхода усилителя промежуточной частоты, проводят ее согласованную фильтрацию,формируют дальностно-временной портрет (ДВП) и дальностно-частотный портрет (ДЧП) целей, выполняют вычисление модуля спектров сигналов и его пороговую обработку.
Под ДВП радиолокационной цели понимается двумерная матрица, сформированная из дискретных отсчетов эхосигналов, соответствующих разным каналам дальности, путем многократного зондирования пространства. Сигнал каждого столбца ДВП представляет собой отсчеты эхосигнала, полученные в одном периоде зондирования и соответствующие последовательно во времени всем каналам дальности. Сигнал каждой строки в ДВП представляет собой отсчеты эхосигнала, соответствующие одному каналу дальности во всех периодах излучения зондирующего сигнала.
Под ДЧП радиолокационной цели понимается двумерная матрица, сформированная из дискретных отсчетов, представляющих собой одномерное преобразование Фурье дискретных сигналов каждой строки ДВП, полученных с помощью алгоритма БПФ.
Недостатки прототипа, так же, как и аналогов, заключаются в том, что при обработке эхосигналов от движущихся с высокими радиальными скоростями целей происходит снижение потенциально достижимого ОСШ и разрешения по дальности и скорости целей.
Причина возникающих недостатков заключается в следующем.
За время накопления, необходимое для многократного зондирования скоростной цели с ВЧП и приема эхосигналов, отраженный от цели сигнал в ДВП наблюдается в разных, расположенных рядом, каналах дальности - происходит миграция цели по дальности. Это явление не позволяет в ДЧП когерентно накопить в каждом канале дальности сформированные сигналы длительностью, равной времени накопления, и амплитуда сигнала на выходе доплеровского фильтра (фильтра БПФ) становится меньше потенциально достижимого значения. В результате снижается ОСШ на выходе ДЧП, длительность отметки цели по дальности в ДЧП становится больше длительности отклика согласованного фильтра, а протяженность сигнала по частоте в ДЧП (ширина спектра доплеровского сигнала) также увеличивается.
Следует отметить, что в описании метода ЦОС в прототипе указывается на способ компенсации временного сдвига эхосигналов путем умножения спектра сигнала в каждом периоде зондирования на фазовый корректирующий множитель.
Однако это не подтверждено описанием технического решения, позволяющего реализовать указанный метод (способ) компенсации временных сдвигов по дальности с помощью дополнительных устройств, работающих во взаимодействии с известными устройствами обработки сигналов в ИД РЛС, нет аналитических выражений, необходимых для вычисления требуемых фазовых множителей, а значит, исключается возможность реализации устройств для выполнения расчетов.
Таким образом, в описании прототипа нет необходимой информации для практической реализации метода компенсации миграций по дальности в ИД РЛС и получения технического результата заявляемого изобретения - повышения ОСШ и улучшения разрешения высокоскоростных целей по дальности и скорости.
Предлагаемое изобретение направлено на преодоление указанных недостатков прототипа и аналогов.
Техническим результатом заявляемого изобретения является повышение ОСШ и улучшение разрешения высокоскоростных целей по дальности и скорости.
Указанный технический результат достигается тем, что в известное устройство, содержащее последовательно соединенные цифровой формирователь квадратурных составляющих (ЦФКС), вход которого является первым входом устройства, и согласованный фильтр (СФ) и последовательно подключенные формирователь ДВП, формирователь ДЧП и вычислитель модуля (ВМ), выход которого является выходом устройства, введены последовательно соединенные процессор БПФ, формирователь матрицы спектров, поэлементный умножитель и процессор обратного БПФ, а также вычислитель фазовых множителей (ФМ) и формирователь матрицы ФМ; причем выход согласованного фильтра связан со входом процессора БПФ, выход процессора обратного БПФ подключен ко входу формирователя дальностно-временного портрета, а второй вход устройства связан со входом вычислителя ФМ, выход которого соединен со входом формирователя матрицы ФМ, выход которого подключен ко второму входу поэлементного умножителя матриц.
Благодаря введению в известное устройство совокупности существенных отличительных признаков, предлагаемое устройство обеспечивает технический результат изобретения - повышение ОСШ и улучшение разрешения высокоскоростных целей по дальности и скорости в ИД РЛС.
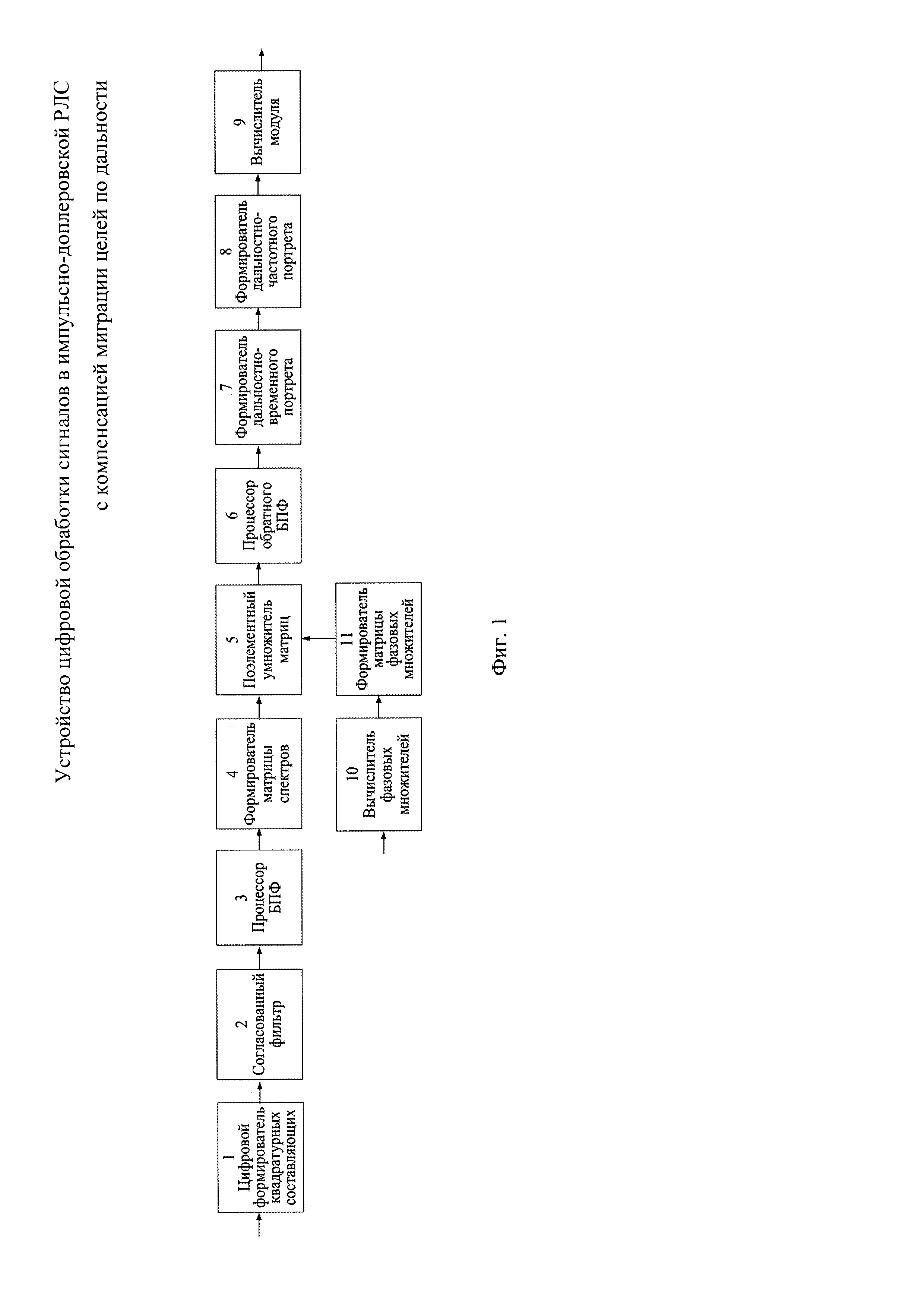
Сущность предлагаемого изобретения поясняется структурной схемой, приведенной на фиг. 1, где обозначено:
1 - цифровой формирователь квадратурных составляющих;
2 - согласованный фильтр;
3 - процессор БПФ;
4 - формирователь матрицы спектров;
5 - поэлементный умножитель матриц;
6 - процессор обратного БПФ;
7 - формирователь ДВП;
8 - формирователь ДЧП;
9 - вычислитель модуля;
10 - вычислитель фазовых множителей;
11 - формирователь матрицы фазовых множителей.
Первым входом устройства является вход ЦФКС 1, выход которого соединен со входом СФ 2, выход которого подключен ко входу процессора БПФ 3, выход которого связан со входом формирователя матрицы спектров 4, выход которого соединен с первым входом поэлементного умножителя матриц 5, выход которого подключен ко входу процессора ОБПФ 6, выход которого связан со входом формирователя ДВП 7, выход которого соединен со входом формирователя ДЧП 8, выход которого подключен ко входу ВМ 9, выход которого является выходом устройства, а второй вход устройства соединен со входом вычислителя ФМ 10, выход которого подключен ко входу формирователя матрицы ФМ 11, выход которого связан со вторым входом поэлементного умножителя матриц 5.
Устройство ЦОС ИД РЛС с компенсацией миграции целей по дальности работает следующим образом.
На первый (сигнальный) вход устройства с выхода приемника РЛС поступает аналоговый сигнал промежуточной частоты. Сигнал подается на вход ЦФКС 1, в котором цифровым способом формируются отсчеты квадратурных составляющих (сигнал преобразуется в цифровую форму, умножается на экспоненту, фильтруется в цифровых фильтрах нижних частот с последующей децимацией выходных отсчетов) [4].
Отсчеты квадратурных составляющих сигнала поступают на вход СФ 2, в котором выполняется согласованная фильтрация эхосигналов во временной области с помощью нерекурсивного цифрового фильтра или в частотной области с использованием метода «быстрой» свертки [4].
Далее отсчеты эхосигнала каждого периода зондирования поступают в процессор БПФ 3, в котором вычисляются отсчеты дискретного преобразования Фурье. Спектральные составляющие эхосигнала записывается в соответствующий данному периоду зондирования столбец формирователя матрицы спектров 4. За период накопления пачки эхосигналов в формирователе 4 формируется матрица спектров эхосигналов.
При использовании устройства в режиме разрешения целей (после обнаружения и оценки параметров цели) одновременно с началом работы на второй (информационный) вход устройства поступает целеуказание о скорости движущейся цели, и в вычислителе ФМ 10 рассчитываются по формулам, приведенным ниже, фазовые множители, на которые необходимо умножить спектры сигналов для каждого периода зондирования. Результаты расчетов в формирователе матрицы ФМ 11 представляются в виде двумерной матрицы, каждый элемент которой соответствует определенному периоду зондирования (номер строки) и определенной спектральной составляющей эхосигнала (номер столбца).
В поэлементном умножителе матриц 5 выполняется перемножение матриц, результатом которого является двумерная матрица, каждый элемент которой представляет собой произведение соответствующих элементов матриц, полученных в формирователе матрицы спектров 4 и в формирователе матрицы ФМ 11.
В процессоре обратного БПФ 6 выполняется обратное БПФ скорректированных спектров эхосигналов каждого периода зондирования.
Далее отсчеты поступают в формирователь ДВП 7, в котором откорректированные во времени реализации сигнала, соответствующие каждому зондированию, записываются по столбцам в оперативное запоминающее устройство формирователя ДВП 7.
С выхода формирователя ДВП 7 дискретные отсчеты эхосигналов двумерной матрицы поступают в формирователь ДЧП 8, в котором отсчеты сигналов каждой строки подвергаются спектральному анализу в процессоре БПФ, входящем в состав формирователя ДЧП 8. Полученные спектры сигналов, соответствующие каждому элементу дальности, представляют собой ДЧП целей.
В вычислителе 9 осуществляется определение модулей комплексных спектров сигналов, которые поступают на выход устройства и могут использоваться для подтверждения обнаружения, уточнения дальности и скорости объектов, разрешения целей.
Алгоритм компенсации миграции целей по дальности заключается в следующем.
Для эхосигнала s(i) в каждом периоде повторения ДВП осуществляется вычисление спектра  с помощью алгоритма БПФ по формуле [4]:
с помощью алгоритма БПФ по формуле [4]:
|
где m = 0, …, N - 1;
N - количество отсчетов эхосигнала в периоде повторения;
s(i) - значения сигнала в дискретных временных точках с номерами i = 0,…, N - 1.
Для компенсации временного сдвига сигнала в частотной области вычисленный спектр эхосигнала  умножается на фазовый множитель в каждом периоде повторения n:
умножается на фазовый множитель в каждом периоде повторения n:
 (2)
(2)
где n = 0, ..., N1 - 1 - номер периода зондирования;
N1 - количество зондирований в пачке;
Fд - частота дискретизации КО сигналов;
Vr - радиальная скорость сближения (отрицательная) или удаления (положительная) носителя и цели;
Tп - период повторения импульсов;
c - скорость света в вакууме.
Формирование сигнала с внесенными временными задержками осуществляется посредством выполнения процедуры обратного БПФ над полученным спектром  в соответствии с выражением [4]:
в соответствии с выражением [4]:
 (3)
(3)
где i = 0, ..., N - 1.
В режимах РЛС, предназначенных для решения задач разрешения целей (уточнения координат обнаруженных объектов, определения количества близкорасположенных целей, их классификации и т.д.), как правило, приближенно определенная скорость сближения носителя и цели в режимах обнаружения и оценки параметров выдается в виде целеуказаний. Первичное измерение скорости сближения носителя и цели может проводиться и по ДЧП, полученному без компенсации миграции целей по дальности.
Рассмотрим преобразования доплеровского сигнала при компенсации миграции целей по дальности предлагаемым способом.
Пусть доплеровская частота принятого эхосигнала равна:
|
где f0 - частота зондирующего сигнала;
λ - длина волны зондирующего сигнала.
Сигнал, сформированный из отсчетов эхосигналов одного канала дальности ДВП, можно записать в общем виде:
|
где А0 - амплитуда комплексной огибающей эхосигнала;
 - начальная фаза сигнала.
- начальная фаза сигнала.
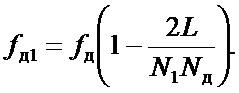
На фиг. 2 приведен пример ДВП скоростной приближающейся цели, откуда видно, что отметка цели за время накопления пачки мигрирует по дальности в пределах 2L отсчетов. Это не позволяет после выполнения БПФ по строкам когерентно накопить весь сигнал в ДЧП до потенциально достижимого значения ОСШ и достигнуть максимального разрешения по дальности и скорости.
После компенсации миграции цели, заключающейся в приближении эхосигналов в первой половине зондирований на величину от L до 0 и удалении эхосигналов во второй половине зондирований на величину от 0 до L, получим в сигнале одного канала дальности откорректированного ДВП отсчеты сдвинутых во времени исходных эхосигналов.
Величину сдвига эхосигнала в n-ом периоде (относительно N1/2) повторения можно выразить формулой
|
где  - количество отсчетов по дальности в периоде повторения;
- количество отсчетов по дальности в периоде повторения;
 - период дискретизации КО сигналов.
- период дискретизации КО сигналов.
Это приведет к соответствующему сдвигу фазы отсчетов комплексной огибающей сигнала в n-ом периоде повторения:
|
Тогда сигнал в канале дальности откорректированного ДВП можно записать в виде:
 (8)
(8)
Частота полученного в канале дальности откорректированного ДВП сигнала, определяемая с помощью процедуры БПФ в ДЧП, равна:
 (9)
(9)
На практике величина максимальной миграции целей по дальности за время накопления пачки эхосигналов в ДВП составляет до 2L = 15, а количество элементов дальности в периоде повторения Nд может достигать 150.
В этом случае сдвиг доплеровской частоты, получаемый в ДЧП, относительно истинного значения не превысит в худшем случае (при максимальной fд, стремящейся к частоте повторения импульсов в пачке Fп) величины
|
что составляет менее 0,1 шага дискретизации по частоте в ДЧП (N1 - количество зондирований в пачке, равное размеру БПФ) и является вполне допустимой величиной для практического использования предлагаемого алгоритма в современных РЛС. Приведенные ниже результаты моделирования подтверждают этот тезис.
Проиллюстрируем на типовых примерах обработки сигналов в ИД РЛС явление миграции целей по дальности и эффективность ее компенсации с помощью предлагаемого изобретения.
Из открытых источников информации следует, что максимальная скорость современных истребителей достигает 2700 км/ч (750 м/с). Зададимся скоростями носителя РЛС и цели, равными V = 700 м/с. С учетом максимально возможного доплеровского сдвига частоты, обусловленного скоростью сближения носителя и цели, выберем частоту повторения зондирующих импульсов равной Fп = 150 кГц, а частоту дискретизации принятых сигналов равной Fд = 15 МГц, что соответствует дистанции по дальности 10 м. Размер БПФ, равный количеству импульсов в пачке, положим равным 16384.
Для оценки эффективности предложенного устройства проведем имитационное моделирование в среде Matlab алгоритмов обработки сигналов, отраженных от высокоскоростной цели.
Результаты моделирования представлены портретами ДВП и ДЧП одиночной цели.
На фиг. 3а изображен модуль ДВП скоростной одиночной цели. Из-за большой скорости цель мигрирует по каналам дальности на 15 отсчетов.
На фиг. 3б и 3в изображены сечения модуля ДВП по дальности и по количеству зондирований скоростной одиночной цели соответственно.
На фиг. 4а изображен модуль ДЧП скоростной одиночной цели.
На фиг. 4б изображено сечение по дальности модуля ДЧП скоростной одиночной цели. Протяженность сигнала по дальности по уровню 0,5 равна 15 отсчетам, что соответствует дистанции 150 м.
На фиг. 4в изображено сечение по скорости модуля ДЧП скоростной одиночной цели. Протяженность сигнала по частоте равна 3 отсчетам. Амплитуда сигнала составляет A = 6398,83 и когерентного накопления всего сигнала из 16384 отсчетов не происходит.
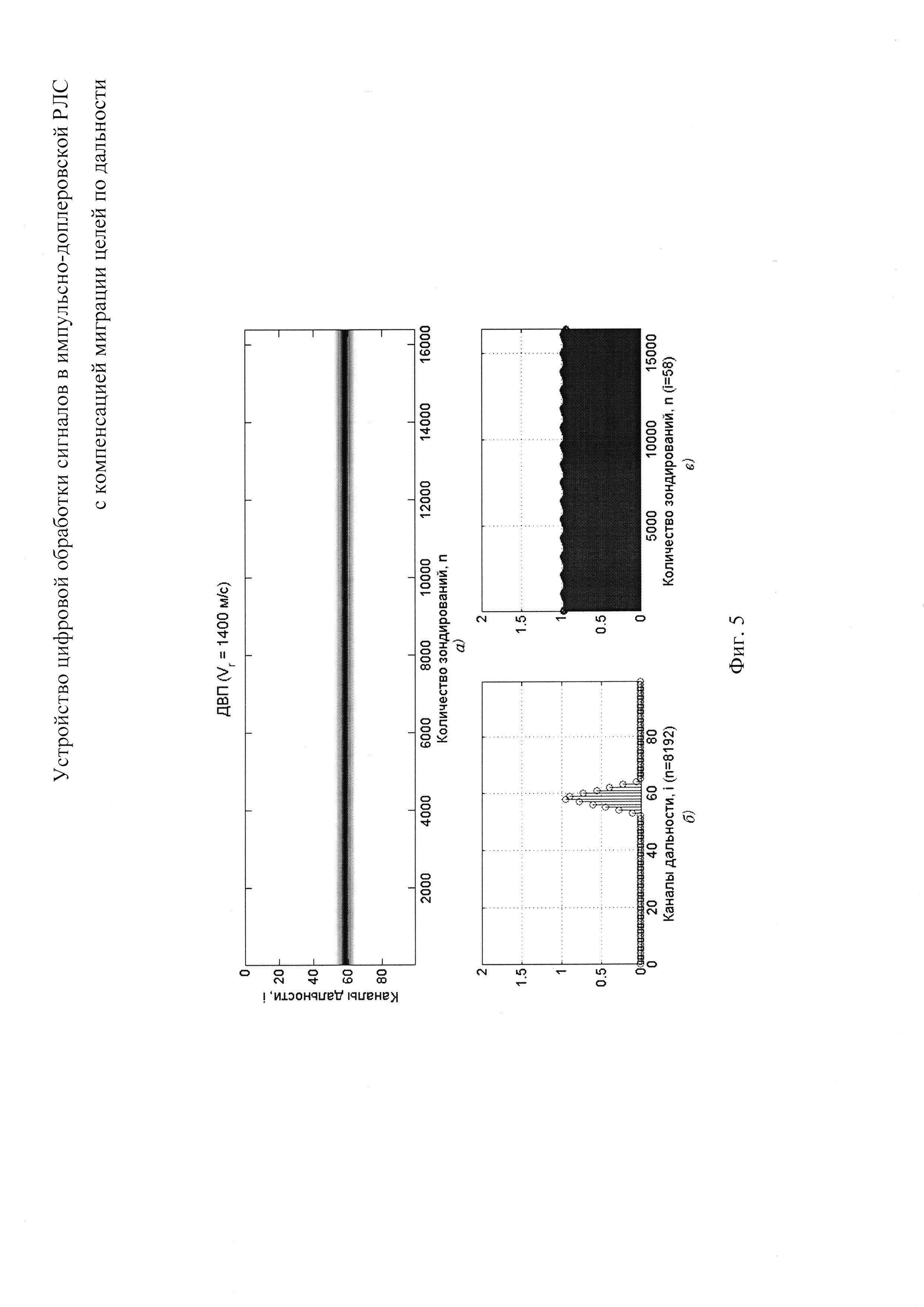
На фиг. 5а изображен модуль ДВП скоростной одиночной цели после компенсации миграции. В результате применения предложенного устройства произошло выравнивание линии отметок цели.
На фиг. 5б и 5в изображены сечения по дальности и по количеству зондирований модуля ДВП скоростной одиночной цели после компенсации миграции соответственно.
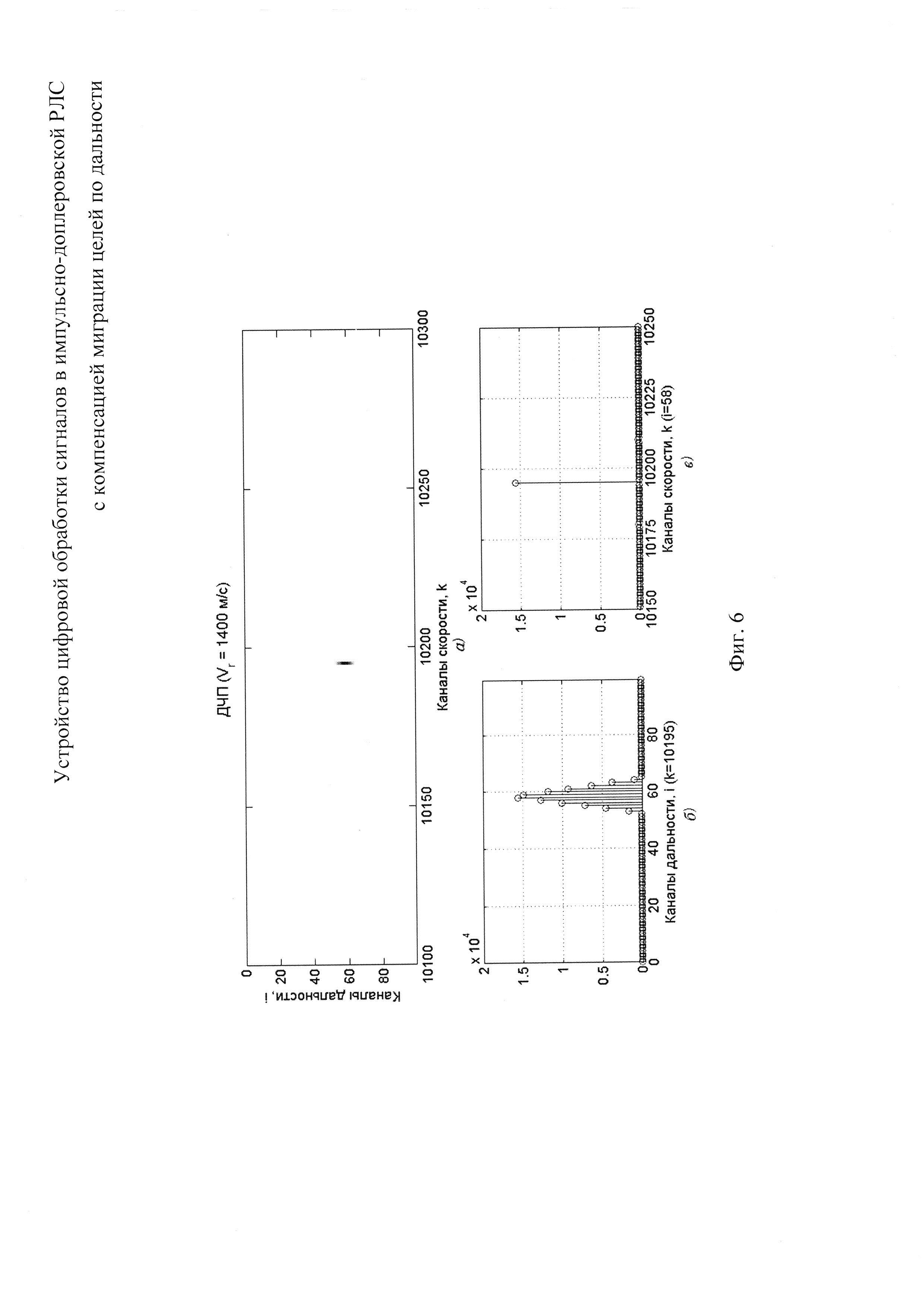
На фиг. 6а изображен модуль ДЧП скоростной одиночной цели после компенсации миграции.
На фиг. 6б изображено сечение по дальности модуля ДЧП скоростной одиночной цели после компенсации миграции. Протяженность сигнала по дальности по уровню 0,5 уменьшилась и стала равна 6 отсчетам, что соответствует дистанции 60 м.
На фиг. 6в изображено сечение по скорости модуля ДЧП скоростной одиночной цели после компенсации миграции. Протяженность сигнала по частоте по уровню 0,5 уменьшилась до 1 отсчета. При этом амплитуда сигнала составила A = 15504,13, т.е. наблюдаем ее увеличение в 2,423 раза (на 7,69 дБ).
Полученные результаты совпадают с потенциальной разрешающей способностью по дальности данного сигнала и полосой пропускания фильтра БПФ соответственно.
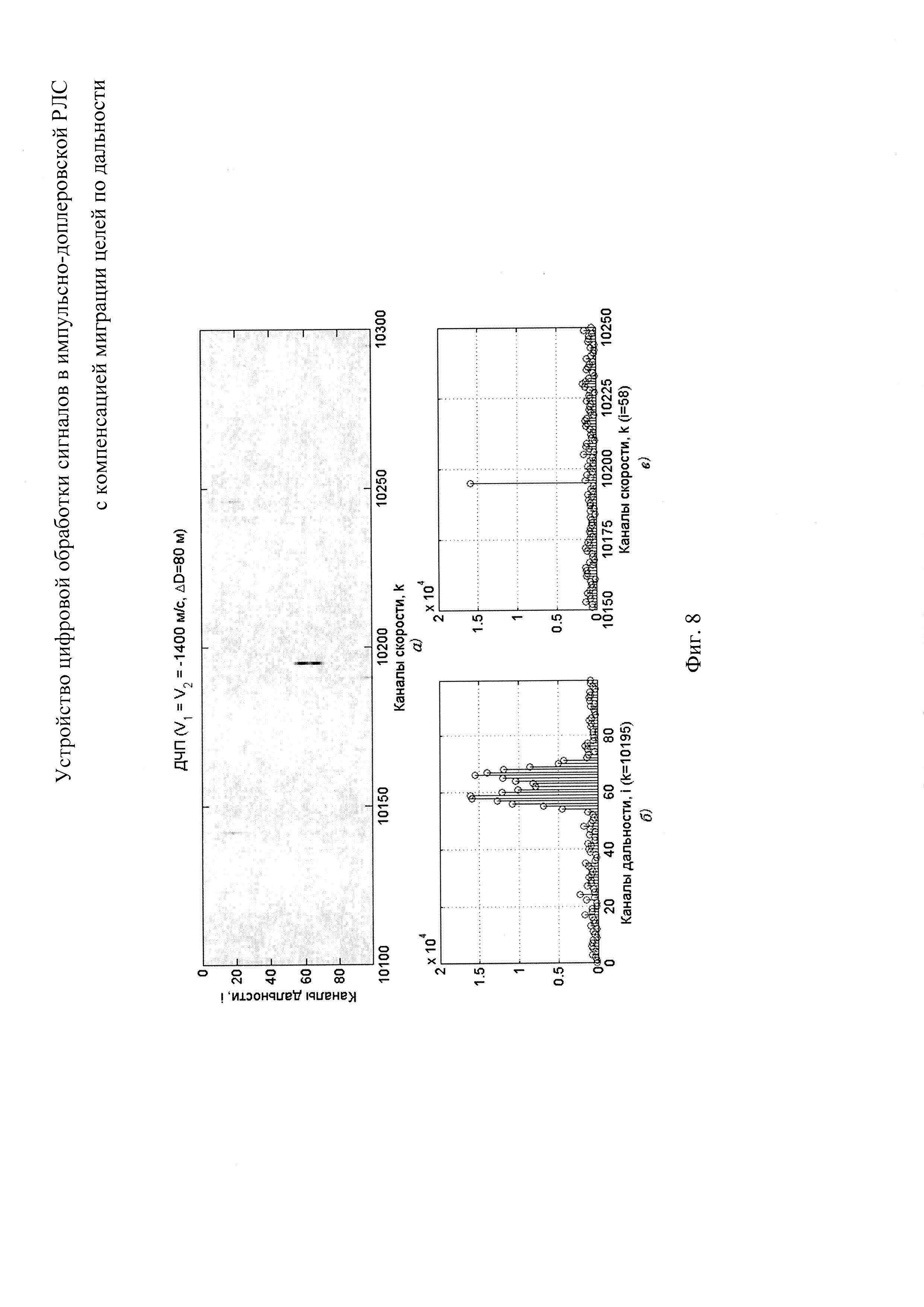
Покажем эффективность предложенного устройства для решения задачи разрешения двух целей, расположенных на расстоянии ΔD = 80 м и движущихся с одинаковыми скоростями V = 700 м/с. Скорость носителя РЛС также равна V = 700 м/с. Прием эхосигналов от данных целей осуществляется на фоне помех типа «белый шум» c ОСШ q = 20 дБ. Разность начальных фаз эхосигналов равна ∆φ0 = 90 .
Результаты моделирования представлены на фиг.7 и фиг.8.
На фиг. 7а изображен модуль ДЧП двух скоростных целей.
На фиг. 7б изображено сечение по дальности модуля ДЧП двух скоростных целей. Видно, что две цели не разрешаются и воспринимаются как одна.
На фиг. 7в изображено сечение по скорости модуля ДЧП двух скоростных целей. Протяженность сигнала по частоте по уровню 0,5 составляет 3 отсчета.
На фиг. 8а изображен модуль ДЧП двух скоростных целей после компенсации миграции.
На фиг. 8б изображено сечение по дальности модуля ДЧП двух скоростных целей после компенсации миграции. Видно, что стало возможным разрешить две цели. При этом ОСШ увеличилось на 4,8 дБ.
На фиг. 8в изображено сечение по скорости модуля ДЧП двух скоростных целей после компенсации миграции. Протяженность сигнала по частоте по уровню 0,5 уменьшилась до 1 отсчета.
Использование в ИД РЛС предлагаемого устройства позволит за счет компенсации в каждом периоде повторения временного сдвига отраженных сигналов повысить на выходе ДЧП ОСШ до потенциально возможных значений и существенно улучшить разрешения по дальности и скорости близкорасположенных целей, перемещающихся в пространстве с высокими скоростями.
Результаты проведенного моделирования подтверждают работоспособность и высокую эффективность использования в ИД РЛС предлагаемого устройства цифровой обработки радиолокационных сигналов, отраженных от близкорасположенных скоростных целей.
Источники информации
1. Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М: Радиотехника, 2006. - 656 с.: ил.
2. Многофункциональные радиолокационные системы: учеб. пособие для вузов / П.И. Дудник, А.Р. Ильчук, Б.Г. Татарский; под ред. Б.Г. Татарского. - М.: Дрофа, 2007. - 283 с.: ил.
3. И.И. Маркович, Е.Е. Завтур. Методы цифровой обработки сигналов, отраженных от высокоманевренных воздушных целей. // Вестник воздушно-космической обороны. / Научно-технический журнал ПАО «НПО «Алмаз». - Вып. № 3(11), 2016. -с 17-23.
4. Маркович И.И. Цифровая обработка сигналов в системах и устройствах: монография / И.И. Маркович. - Ростов н/Д: Изд-во ЮФУ: 2012. - 236 с.
Устройство цифровой обработки сигналов в импульсно-доплеровской РЛС с компенсацией миграции целей по дальности, содержащее последовательно соединенные цифровой формирователь квадратурных составляющих, вход которого является первым входом устройства, и согласованный фильтр, и последовательно подключенные формирователь дальностно-временного портрета, формирователь дальностно-частотного портрета и вычислитель модуля, выход которого является выходом устройства, отличающееся тем, что введены последовательно соединенные процессор БПФ, формирователь матрицы спектров, поэлементный умножитель матриц и процессор обратного БПФ, а также вычислитель фазовых множителей и формирователь матрицы фазовых множителей; причем выход согласованного фильтра связан со входом процессора БПФ, выход процессора обратного БПФ подключен ко входу формирователя дальностно-временного портрета, а второй вход устройства связан со входом вычислителя фазовых множителей, выход которого соединен со входом формирователя матрицы фазовых множителей, выход которого подключен ко второму входу поэлементного умножителя матриц.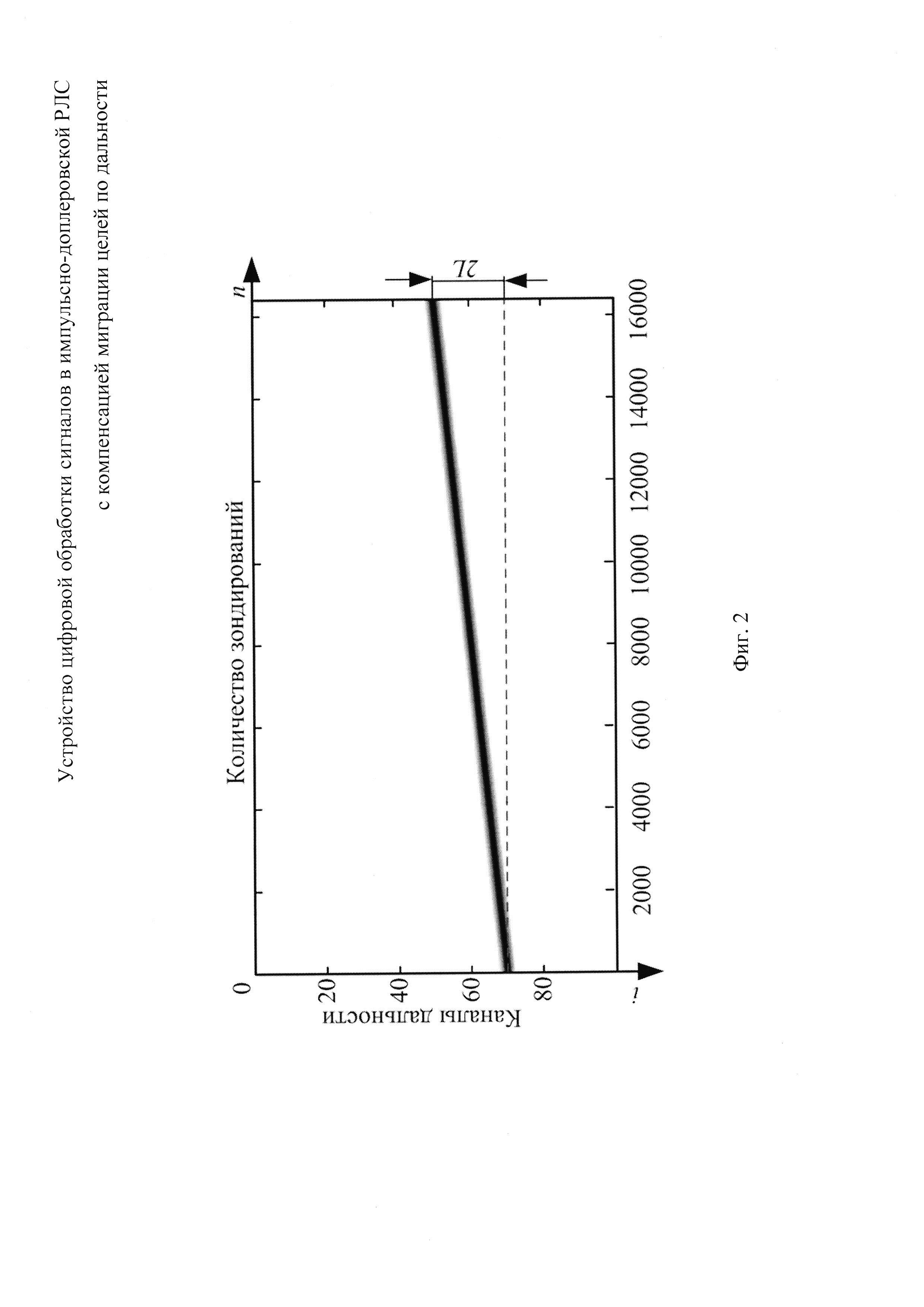
Способ получения вяжущего для бетонов и строительных растворов
Бортовая радиолокационная станция дистанционно управляемого летательного аппарата
Резьбовое соединение деталей
Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой
Способ нанесения медного покрытия на полиэфирэфиркетон
Полимерная композиция для поглощения высокочастотной энергии
Электролит для углеродного суперконденсатора с двойным электрическим слоем
Волноводный уголок
Антенный излучатель
Способ формирования пеленгационных диаграмм направленности в антенне кругового электронного сканирования
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии и устройство для его осуществления
Система селекции движущихся целей с измерением дальности, радиальной скорости и направления движения
Устройство цифровой обработки сигналов в импульсно-доплеровской рлс с компенсацией чм доплеровских сигналов
Впередсмотрящий гидролокатор глубоководного носителя
Способ цифровой обработки сигналов в импульсно-доплеровской рлс с высокой частотой повторения и устройство для его осуществления

