Бортовая радиолокационная станция дистанционно управляемого летательного аппарата
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиолокации, в частности, радиолокационным станциям, устанавливаемым на беспилотных летательных аппаратах.
Известна «Бортовая радиолокационная станция для самолетной системы управления вооружением [RU 2188436 С1, опубл. 27.08.2002 г., МПК G01S 13/40], содержащая фазированную антенную решетку, антенно-волноводную систему, антенно-волноводный переключатель, приемник, передатчик, причем фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем. Кроме того, она содержит блок управления лучом ФАР, устройство ввода-вывода, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, вычислитель скорости, дальности, пространственных углов цели режима воздух-воздух, вычислитель скорости, дальности, пространственных углов цели режима воздух-поверхность, вычислитель задачи боевого применения, формирователь сигналов для подвесок исполнительных элементов режима воздух-воздух, формирователь сигналов для подвесок исполнительных элементов режима воздух-поверхность, причем передатчик выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность. Приемник выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, а фазированная антенная решетка выполнена с гидроприводом. Первый выход приемника соединен с первым входом устройства ввода-вывода, первый выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, выход вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность соединен с первым входом вычислителя задачи боевого применения. Первый выход вычислителя задачи боевого применения подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-поверхность, выход которого является первым выходом бортовой радиолокационной станции для самолетной системы управления вооружением. Второй выход приемника подключен к первому входу блока управления лучом ФАР, первый выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом, второй выход блока управления лучом ФАР соединен с третьим входом вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность. Второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации, второй выход блока управления режимами работы и синхронизации соединен со вторым входом вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, третий выход блока управления режимами работы и синхронизации подключен к первому входу антенно-волноводного переключателя. Четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность, первый выход коммутатора режима воздух-воздух, воздух-поверхность подключен к третьему входу приемника, второй выход антенно-волноводного переключателя подключен к второму входу приемника, четвертый выход приемника соединен со вторым входом устройства ввода-вывода, второй выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух. Пятый выход приемника соединен с третьим входом блока управления лучом ФАР, выход вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух соединен со вторым входом вычислителя задачи боевого применения. Второй выход вычислителя задачи боевого применения подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-воздух, выход которого является вторым выходом бортовой радиолокационной станции для самолетной системы управления вооружением. Пятый выход блока управления режимами работы и синхронизации подключен ко второму входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, третий выход блока управления лучом ФАР подключен к третьему входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, второй выход коммутатора режима воздух-воздух, воздух-поверхность подключен к четвертому входу приемника. Третий выход коммутатора режима воздух-воздух, воздух-поверхность соединен с первым входом передатчика, первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, четвертый выход коммутатора режима воздух-воздух, воздух-поверхность соединен со вторым входом передатчика, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя. Первый выход антенно-волноводного переключателя соединен с первым входом приемника, третий выход приемника подключен к первому входу блока управления режимами работы и синхронизации, а шестой выход приемника соединен со вторым входом блока управления режимами работы и синхронизации.
Недостатками такой бортовой радиолокационной станции для самолетной системы управления вооружением является малая помехозащищенность при работе в комбинированном режиме и высокая радиозаметность при включении излучения.
Наиболее близкой по технической сущности к предлагаемой является «Бортовая радиолокационная станция» [RU 2609156 С1, опубл. 30.01.2017 г., МПК G01S 13/40], содержащая фазированную антенную решетку и гидроприводом, передатчик, приемник, синхронизатор, отличающаяся тем, что введены компенсационная антенна, устройство предварительной обработки сигнала, преобразователь команд управления, пульт управления и индикаторное устройство. Первый выход фазированной антенной решетки с гидроприводом соединен с первым входом приемника, второй выход фазированной антенной решетки с гидроприводом соединен со вторым входом приемника, выход компенсационной антенны соединен с третьим входом приемника, выход приемника подключен к первому входу устройства предварительной обработки сигнала, выход устройства предварительной обработки сигнала соединен с входом индикаторного устройства. Выход пульта управления подключен ко входу преобразователя команд управления, первый выход преобразователя команд управления соединен со вторым входом устройства предварительной обработки сигнала, первый выход синхронизатора подключен к первому входу фазированной антенной решетки с гидроприводом, второй выход синхронизатора подключен к третьему входу устройства предварительной обработки сигнала, третий выход синхронизатора подключен к первому входу передатчика, четвертый выход синхронизатора соединен с четвертым входом устройства предварительной обработки сигнала, второй выход пульта управления соединен с пятым входом устройства предварительной обработки сигнала, второй выход преобразователя команд управления подключен ко второму входу передатчика, а выход передатчика соединен со вторым входом фазированной антенной решетки с гидроприводом.
Недостатками известной бортовой радиолокационной станции является необходимость использования собственного излучения для обнаружения, захвата и сопровождения воздушных, наземных целей и их комбинаций, что является демаскирующим фактором для дистанционно управляемого летательного аппарата.
Технический результат предлагаемой бортовой радиолокационной станции дистанционно управляемого летательного аппарата состоит в обеспечении скрытности работы при обнаружении целей в БРЛС БПЛА при использовании пассивного режима работы, при котором подсвет целей осуществляется с другой излучающей РЛС внешнего носителя, а прием отраженных от целей сигналов осуществляется БРЛС БПЛА без использования собственного излучения, в результате чего определяются пеленги сопровождаемых целей.
Сущность предлагаемого изобретения состоит в том, что бортовая радиолокационная станция дистанционно управляемого летательного аппарата, содержит фазированную антенную решетку (ФАР) с гидроприводом, передатчик, приемник, синхронизатор, компенсационную антенну, устройство предварительной обработки сигнала, преобразователь команд управления, пульт управления и индикаторное устройство. Выход компенсационной антенны соединен с третьим входом приемника, выход приемника подключен к первому входу устройства предварительной обработки сигнала. Выход устройства предварительной обработки сигнала соединен с входом индикаторного устройства. Первый выход пульта управления подключен к входу преобразователя команд управления, первый выход преобразователя команд управления соединен со вторым входом устройства предварительной обработки сигнала. Первый выход синхронизатора подключен к первому входу передатчика, второй выход синхронизатора подключен к третьему входу устройства предварительной обработки сигнала. Третий выход синхронизатора подключен к первому входу ФАР с гидроприводом, четвертый выход синхронизатора соединен с четвертым входом устройства предварительной обработки сигнала, второй выход пульта управления соединен с пятым входом устройства предварительной обработки сигнала, второй выход преобразователя команд управления подключен ко второму входу передатчика, а выход передатчика соединен со вторым входом ФАР с гидроприводом.
Новыми признаками, обеспечивающими достижение заявленного технического результата, являются: введение коммутатора разностного канала, амплитудного детектора разностного канала, адаптивного порогового устройства разностного канала, измерителя сигнала разностного канала, формирователя трасс разностного канала, коммутатора суммарного канала, амплитудного детектора суммарного канала, адаптивного порогового устройства суммарного канала, измерителя сигнала суммарного канала и формирователя трасс суммарного канала. Первый выход ФАР с гидроприводом соединен с первым входом коммутатора суммарного канала, первый выход которого подключен к первому входу приемника, второй выход коммутатора суммарного канала соединен с входом амплитудного детектора суммарного канала, выход амплитудного детектора суммарного канала подключен ко входу адаптивного порогового устройства суммарного канала, выход которого соединен со входом измерителя сигнала суммарного канала, выход которого подключен ко входу формирователь трасс суммарного канала, выход которого подключен к шестому входу устройства предварительной обработки сигнала. Второй выход ФАР с гидроприводом соединен со первым входом коммутатора разностного канала, первый выход которого соединен со вторым входом приемника, второй выход коммутатора разностного канала соединен со входом амплитудного детектора разностного канала, выход амплитудного детектора разностного канала подключен ко входу адаптивного порогового устройства разностного канала, выход которого соединен со входом измерителя сигнала разностного канала, выход измерителя сигнала разностного канала подключен ко входу формирователя трасс разностного канала, выход которого подключен к седьмому входу устройства предварительной обработки сигнала, четвертый выход пульта управления подключен ко второму входу коммутатора суммарного канала и второму входу коммутатора разностного канала, а третий выход пульта управления соединен с восьмым входом устройства предварительной обработки сигнала.
На фиг. 1 изображена блок-схема предлагаемой бортовой радиолокационной станции дистанционно управляемого летательного аппарата (БРЛС БПЛА).
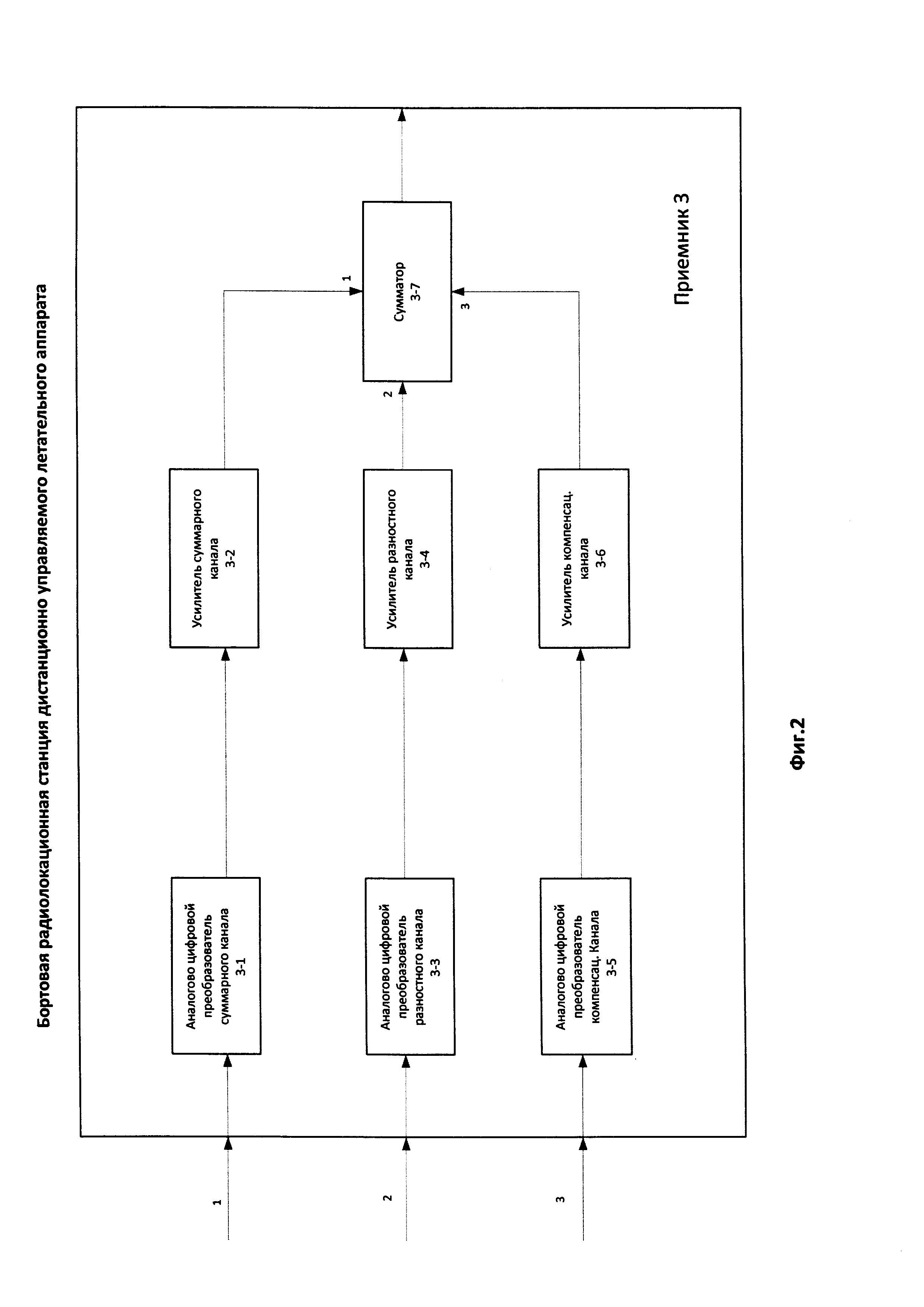
На фиг. 2 изображен пример выполнения приемника.
На фиг. 3 изображен пример выполнения передатчика.
На фиг. 4 изображен пример выполнения устройства предварительной обработки сигнала.
На фиг. 5 изображен пример выполнения синхронизатора.
Бортовая радиолокационная станция дистанционно управляемого летательного аппарата, блок-схема которой приведена на фиг. 1, состоит из ФАР с гидроприводом 1, компенсационной антенны 2, приемника 3, передатчика 4, индикаторного устройства 5, устройства предварительной обработки сигнала 6, синхронизатора 7, преобразователя команд управления 8, пульта управления 9, коммутатора суммарного канала 10, коммутатора разностного канала 11, амплитудного детектора разностного канала 12, адаптивного порогового устройства разностного канала 13, измерителя сигнала разностного канала 14, формирователя трасс разностного канала 15, амплитудного детектора суммарного канала 16, адаптивного порогового устройства суммарного канала 17, измерителя сигнала суммарного канала 18, формирователя трасс суммарного канала 19.
Выход компенсационной антенны 2 соединен с третьим входом приемника 3, выход приемника 3 подключен к первому входу устройства предварительной обработки сигнала 6, выход устройства предварительной обработки сигнала 6 соединен с входом индикаторного устройства 5. Первый выход пульта управления 9 подключен к входу преобразователя команд управления 8, первый выход преобразователя команд управления 8 соединен со вторым входом устройства предварительной обработки сигнала 6. Первый выход синхронизатора подключен к первому входу передатчика, второй выход синхронизатора 7 подключен к третьему входу устройства предварительной обработки сигнала 6, третий выход синхронизатора 7 подключен к первому входу ФАР с гидроприводом 1. Четвертый выход синхронизатора 7 соединен с четвертым входом устройства предварительной обработки сигнала 6. Второй выход пульта управления 9 соединен с пятым входом устройства предварительной обработки сигнала 6, второй выход преобразователя команд управления 8 подключен ко второму входу передатчика 4, а выход передатчика 4 соединен со вторым входом ФАР с гидроприводом 1. Первый выход ФАР с гидроприводом 1 соединен с первым входом коммутатора суммарного канала 10, первый выход которого подключен к первому входу приемника 3, второй выход коммутатора суммарного канала 10 соединен с входом амплитудного детектора суммарного канала 16, выход амплитудного детектора суммарного канала 16 подключен ко входу адаптивного порогового устройства суммарного канала 17, выход которого соединен со входом измерителя сигнала суммарного канала 18, выход которого подключен ко входу формирователь трасс суммарного канала 19, выход которого подключен к шестому входу устройства предварительной обработки сигнала 6. Второй выход ФАР с гидроприводом 1 соединен со первым входом коммутатора разностного канала 11, первый выход которого соединен со вторым входом приемника 3, второй выход коммутатора разностного канала 11 соединен со входом амплитудного детектора разностного канала 12, выход амплитудного детектора разностного канала 12 подключен ко входу адаптивного порогового устройства разностного канала 13, выход которого соединен со входом измерителя сигнала разностного канала 14, выход измерителя сигнала разностного канала 14 подключен ко входу формирователя трасс разностного канала 15, выход которого подключен к седьмому входу устройства предварительной обработки сигнала 6, четвертый выход пульта управления 9 подключен ко второму входу коммутатора суммарного канала 10 и второму входу коммутатора разностного канала 11, а третий выход пульта управления 9 соединен с восьмым входом устройства предварительной обработки сигнала 6.
Приемник 3, блок-схема которого приведена на фиг. 2, состоит из аналогово-цифрового преобразователя суммарного канала 3-1, вход которого является первым входом приемника 3, а выход аналогово-цифрового преобразователя суммарного канала 3-2 соединен с входом усилителя суммарного канала 3-2, выход усилителя суммарного канала 3-2 подключен к первому входу сумматора 3-7.
Аналогово-цифровой преобразователь разностного канала 3-3, вход которого является вторым входом приемника 3, а выход аналогово-цифрового преобразователя разностного канала 3-3 соединен с входом усилителя разностного канала 3-4, выход усилителя разностного канала 3-4 подключен ко второму входу сумматора 3-7.
Аналогово-цифровой преобразователь компенсационного канала 3-5, вход которого является третьим входом приемника 3, а выход аналогово-цифрового преобразователя компенсационного канала 3-5 соединен с входом усилителя компенсационного канала 3-6, выход усилителя компенсационного канала 3-6 подключен к третьему входу сумматора 3-7, выход сумматора 3-7 является выходом приемника 3.
Передатчик 4, блок-схема которого приведена на фиг. 3, состоит из задающего генератора 4-1, вход которого является первым входом передатчика 4, а выход подключен к первому входу усилителя мощности 4-2, выход усилителя мощности 4-2 является выходом передатчика 4. Второй вход усилителя мощности 4-2 подключен к выходу блока управления уровнем мощности излучаемого сигнала 4-3, вход блока управления уровнем мощности излучаемого сигнала 4-3 является вторым входом передатчика 4.
Устройство предварительной обработки сигнала 6, блок-схема которого приведена на фиг. 4, состоит из умножителя 6-1, первый вход которого является входом устройства предварительной обработки сигнала 6. Выход умножителя 6-1 подключен к входу накопителя 6-2, выход накопителя 6-2 подключен к первому входу порогового устройства 6-3, выход порогового устройства 6-3 является выходом устройства предварительной обработки сигнала 6, второй вход порогового устройства 6-3 является вторым входом устройства предварительной обработки сигнала 6. Ко второму входу умножителя 6-1 подключен выход коммутатора 6-4. Первый вход коммутатора 6-4 является третьим входом устройства предварительной обработки сигнала 6. Второй вход коммутатора 6-4 является четвертым входом устройства предварительной обработки сигнала 6, третий вход коммутатора 6-4 является пятым входом устройства предварительной обработки сигнала 6. Первый вход коммутатора 6-5 является шестым входом устройства предварительной обработки сигнала 6. Второй вход коммутатора 6-5 является седьмым входом устройства предварительной обработки сигнала 6. Выход коммутатора 6-5 соединен с третьим входом умножителя 6-1.
Синхронизатор 7, блок-схема которого приведена на фиг. 5, состоит из генератора опорной частоты 7-1, первый выход генератора опорной частоты подключен к последовательно соединенным первому стробирующему устройству 7-2, первому умножителю частоты 7-3 и формирователю импульсов фазирования 7-4, выход которого является первым выходом синхронизатора 7. Второй выход генератора опорной частоты 7-1 подключен к последовательно соединенным второму стробирующему устройству 7-5, второму умножителю частоты 7-6, формирователю импульсов режима воздух-поверхность 7-7, выход которого является вторым выходом синхронизатора 7. Третий выход генератора опорной частоты 7-1 подключен к последовательно соединенным третьему стробирующему устройству 7-8, третьему умножителю частоты 7-9 и формирователю импульса запуска передатчика 7-10, выход которого является третьим выходом синхронизатора 7. Четвертый выход генератора опорной частоты 7-1 подключен к последовательно соединенным четвертому стробирующему устройству 7-11, четвертому умножителю частоты 7-12 и формирователю импульсов режима воздух-воздух 7-13, выход которого является четвертым выходом синхронизатора 7.
Бортовая радиолокационная станция дистанционно управляемого летательного аппарата (БРЛС БПЛА) имеет несколько режимов работы, в частности режим воздух-воздух, воздух-поверхность и комбинированный режим.
Бортовая радиолокационная станция дистанционно управляемого летательного аппарата работает следующим образом: управление работой осуществляется оператором с пульта управления 9, команды с которого преобразуются в цифровую форму в последовательном коде в преобразователе команд управления 8. По этим командам определяются режимы работы бортовой радиолокационной станции.
В зависимости от выполняемой задачи в преобразователе команд управления 8 последовательно включаются режимы поиска и сопровождения, формируя общую временную диаграмму работы бортовой радиолокационной станции дистанционно управляемого летательного аппарата.
При поиске и обнаружении воздушных и наземных целей и их комбинаций, БРЛС БПЛА излучает мощный зондирующий импульсный сигнал, принимает отраженные от воздушных целей и земной поверхности радиосигналы и выделяет информацию о параметрах излучаемых объектов. Излучение зондирующего сигнала производится через ФАР с гидроприводом 1 бортовой радиолокационной станции, сканирующую в заданной преобразователем команд управления 8 области пространства. Импульсный зондирующий сигнал представляет собой выборки из непрерывного сигнала высокостабильного задающего генератора 4-1 передатчика 4, усиленные в усилителе мощности 4-2 передатчика 4.
В режимах поиска воздушных целей сканирование производится фазированной антенной решеткой (ФАР) с гидроприводом 1 остронаправленным лучом по нескольким азимутальным строкам, отстоящих друг от друга по углу места примерно на половину ширины диаграммы направленности ФАР с гидроприводом 1 по углу места.
Используя практическую безинерционность луча фазированной антенной решетки и возможность установки луча антенны в любое положение, в каждом такте работы бортовой радиолокационной станции обеспечивается сохранение сканирования луча в заданной зоне обзора при непрерывном сопровождении цели.
Для проведения боевых операций по наземным целям с одновременной возможностью осуществлять работу по воздушным целям реализуется сопровождение наземных и воздушных целей одновременно по команде от пульта управления 9. При этом в синхронизаторе 7 реализуется временная диаграмма комбинированного режима, в которой осуществляется временное разделение циклов обзора в режимах «Воздух-воздух» и «Воздух-поверхность» с возможностью быстрой перестройки диаграммы направленности ФАР с гидроприводом 1 при сопровождении воздушных и наземных целей. В устройстве предварительной обработки сигналов 6 происходит первичная обработка информации, поступившей с приемника 3, включающая в себя умножение сигналов, их накопление и сравнение с заданным порогом. В случае превышения обрабатываемого сигнала над порогом, в индикаторном устройстве формируется отметка о наличии цели. БРЛС БПЛА одновременно осуществляет радиолокационную разведку источников излучения без использования бортовой станции разведки в рабочем диапазоне частот с индикацией источника активной помехи на индикаторном устройстве 5.
При этом БРЛС БПЛА по команде оператора осуществляет поиск мощного сигнала активной помехи в рабочем диапазоне частот. Нормировка и обработка суммарного, разностного и компенсационного сигналов осуществляется в аналогово-цифровых преобразователях 3-1, 3-2, 3-5, усилителях 3-2, 3-4, 3-6, сумматоре 3-7 приемника 3. Кроме того, для повышения скрытности работы БРЛС БПЛА, по команде оператора в блоке управления уровня мощности излучаемого сигнала 4-3 передатчика 4 устанавливается пониженный уровень мощности излучаемого сигнала БРЛС, в результате чего значительно уменьшаются дальности обнаружения собственного излучения БРЛС БПЛА радиотехническими средствами разведки противника.
С целью дополнительного повышения помехозащищенности БРЛС БПЛА от активных и пассивных помех в БРЛС БПЛА применяется компенсация сигналов, поступающих по боковым лепесткам диаграммы направленности. В компенсационном канале используется дополнительная компенсационная антенна 2 с широкой диаграммой направленности, перекрывающей боковые лепестки диаграммы направленности ФАР с гидроприводом 1. Сигналы, принимаемые ФАР с гидроприводом 1 и компенсационной 2 антеннами обрабатываются в идентичных каналах приемника 3 и после преобразования в цифровую форму поочередно поступают в устройство предварительной обработки сигнала 6, где производится логическое сравнение сигналов основного и компенсационного каналов с выдачей сигнала цели на индикаторное устройство 5. Взаимная синхронизация блоков БРЛС БПЛА осуществляется в синхронизаторе 7, в котором из сигнала опорной частоты задающего генератора передатчика 4 формируются импульсы и стробы, необходимые для синхронной работы БРЛС БПЛА в различных режимах. Основными сигналами, вырабатываемыми синхронизатором являются тактовые импульсы, обеспечивающие временную привязку преобразователя команд управления 8, импульсы запуска передатчика 4, определяющие частотно-временные параметры обрабатывающего сигнала.
В задающем генераторе 4-1 передатчика 4 вырабатывается сигнал опорной частоты. Сигналы литерных частот, обзора и подсвета, усиливаются до требуемого уровня, в усилителе мощности 4-2 передатчика 4 и поступают в ФАР с гидроприводом 1 для излучения в пространство.
Просмотр пространства ФАР с гидроприводом 1 для расширения углов прокачки производится игольчатой диаграммой направленности ДН (по воздушным целям) и расширенной по углу места ДН (по наземным целям) по командам от преобразователя команд управления 8 с пульта управления 9.
Во время приема излученного сигнала обеспечивается формирование суммарной и двух разностных по азимуту и по углу места диаграмм направленности. Обработка суммарного, разностного и компенсационного каналов осуществляется аналогичным образом.
Преобразователь команд управления 8 осуществляет управление работой блоков БРЛС БПЛА в разных режимах работы, осуществляет выдачу информации в индикаторное устройство 5.
Для повышения живучести самой БРЛС БПЛА дополнительно формируется и излучается в направлении на цель помеховый сигнал.. Этот режим задается с пульта управления в виде разовой команды, поступая на преобразователь команд управления 8 переключает режим работы передатчика 4. По этой команде задающий генератор 4-1 формирует помеховый сигнал, который усиливается в усилителе мощности 4-2, излучается ФАР с гидроприводом 1, имеющей значительный коэффициент усиления, мощный сигнал в направлении на цель.
Излучение зондирующих импульсов в пространство как номинальной так и пониженной мощности является демаскирующим фактором. Для обеспечения скрытности работы при обнаружении целей в БРЛС БПЛА используют пассивный режим работы, при котором подсвет целей осуществляется с другой излучающей радиолокационной станции внешнего носителя, а прием отраженных от целей сигналов осуществляет БРЛС БПЛА без собственного излучения, в результате чего вырабатываются пеленги сопровождаемых целей.
При получении команды включения режима пассивной пеленгации с внешнего пункта управления с выхода 3 пульта управления 9 формируются команды, поступающие на коммутатор суммарного канала 10 и коммутатор разностного канала 11, которые переключают соответствующие приемные тракты на амплитудные детекторы суммарного канала 16 и разностного канала 12, где измеряются амплитуды сигналов суммарного и разностного каналов. По величине этих сигналов адаптивные пороговые устройства суммарного 17 и разностного 13 каналов в соответствии с допустимым динамическим диапазоном по каждому из каналов выставляют пороги. Далее нормированные сигналы, отраженные от цели по каждому из каналов через измерители сигала суммарного канала 18 и измеритель сигнала разностного канала 14, а также формирователи трасс суммарного канала 19 и трасс разностного каналов поступают на 6-ой и 7-ой входы устройства обработки сигнала 6, на выходе которого реализуются коды, пропорциональные азимутальным и угломестным пеленгам цели, поступающие на индикаторные устройства. Измеренные в пассивном режиме пеленги цели и расчетная триангуляционная дальность до цели используется для подготовки полетного задания соответствующих бортовых средств поражения.
Бортовая радиолокационная станция дистанционно управляемого летательного аппарата, содержащая фазированную антенную решетку (ФАР) с гидроприводом, передатчик, приемник, синхронизатор, компенсационную антенну, устройство предварительной обработки сигнала, преобразователь команд управления, пульт управления и индикаторное устройство, выход компенсационной антенны соединен с третьим входом приемника, выход приемника подключен к первому входу устройства предварительной обработки сигнала, выход устройства предварительной обработки сигнала соединен с входом индикаторного устройства, первый выход пульта управления подключен к входу преобразователя команд управления, первый выход преобразователя команд управления соединен со вторым входом устройства предварительной обработки сигнала, первый выход синхронизатора подключен к первому входу передатчика, второй выход синхронизатора подключен к третьему входу устройства предварительной обработки сигнала, третий выход синхронизатора подключен к первому входу ФАР с гидроприводом, четвертый выход синхронизатора соединен с четвертым входом устройства предварительной обработки сигнала, второй выход пульта управления соединен с пятым входом устройства предварительной обработки сигнала, второй выход преобразователя команд управления подключен ко второму входу передатчика, а выход передатчика соединен со вторым входом ФАР с гидроприводом, отличающийся тем, что дополнительно введены коммутатор суммарного канала, коммутатор разностного канала, амплитудный детектор разностного канала, адаптивное пороговое устройство разностного канала, измеритель сигналов разностного канала, формирователь трасс разностного канала, амплитудный детектор суммарного канала, адаптивное пороговое устройство суммарного канала, измеритель сигналов суммарного канала и формирователь трасс суммарного канала, причем первый выход ФАР с гидроприводом соединен с первым входом коммутатора суммарного канала, первый выход которого подключен к первому входу приемника, второй выход коммутатора суммарного канала соединен с входом амплитудного детектора суммарного канала, выход амплитудного детектора суммарного канала подключен ко входу адаптивного порогового устройства суммарного канала, выход которого соединен со входом измерителя сигнала суммарного канала, выход которого подключен ко входу формирователя трасс суммарного канала, выход которого подключен к шестому входу устройства предварительной обработки сигнала, второй выход ФАР с гидроприводом соединен с первым входом коммутатора разностного канала, первый выход которого соединен со вторым входом приемника, второй выход коммутатора разностного канала соединен со входом амплитудного детектора разностного канала, выход амплитудного детектора разностного канала подключен ко входу адаптивного порогового устройства разностного канала, выход которого соединен со входом измерителя сигнала разностного канала, выход которого подключен ко входу формирователя трасс разностного канала, выход которого подключен к седьмому входу устройства предварительной обработки сигнала, четвертый выход пульта управления подключен ко второму входу коммутатора суммарного канала и второму входу коммутатора разностного канала, а третий выход пульта управления соединен с восьмым входом устройства предварительной обработки сигнала.
Теплопроводящая диэлектрическая композиция
Способ радиолокационного обнаружения опасных препятствий при маловысотном полете летательного аппарата
Способ формирования широкоугольной зоны сканирования антенной системы с электронным управлением лучом
Теплопроводящий диэлектрический компаунд
Зенитный ракетный комплекс
Способ нанесения химического никелевого покрытия на полиэфирэфиркетон
Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией
Резьбовое соединение деталей
Способ нанесения медного покрытия на полиэфирэфиркетон
Устройство цифровой обработки сигналов в импульсно-доплеровской рлс с компенсацией миграции целей по дальности
Устройство наземного контроля радиолокационной системы управления
Система целераспределения подвижных объектов
Способ обнаружения вертолетов бортовой радиолокационной станцией
Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией
Электромеханический цилиндровый замок
Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны
Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией
Радиоэлектронный герметичный блок
Установка замкнутого биоэлектрохимического цикла для генерации энергии и способ генерации энергии микроорганизмами

