Результат интеллектуальной деятельности: ПЕРЕДАЧА СИГНАЛОВ УПРАВЛЕНИЯ И СИГНАЛОВ ДАННЫХ
Вид РИД
Изобретение
Изобретение относится к способу передачи сигнала управления и первого сигнала данных между управляющим устройством и устройством управления для силового полупроводникового устройства.
Далее изобретение относится к блоку для выполнения подобного способа.
Кроме того, изобретение относится к системе для цифровой передачи, по меньшей мере, одного сигнала управления и, по меньшей мере, одного первого сигнала данных между управляющим устройством и устройством управления и для цифровой передачи, по меньшей мере, одного сигнала квитирования, по меньшей мере, вместе с одним вторым сигналом данных в обратном направлении, включающей в себя, по меньшей мере, один подобный блок.
Подобный способ используется при управлении силовыми полупроводниковыми приборами, в частности в выпрямителях тока. Возможными применениями являются: электрические приводы, ветросиловые установки, железнодорожные системы и энергетическая техника. Через интерфейс между управляющим устройством и устройством управления должны передаваться два различных типа сигналов:
- детерминированные по времени сигналы реального времени для управления силовыми полупроводниковыми приборами и их квитирование (ответные сигналы),
- сигналы данных с дополнительной информацией, например для задания параметров, диагностики и передачи измеренных значений.
Детерминированные по времени сигналы реального времени не должны изменяться по своей форме и могут лишь задерживаться по времени на незначительную, точно заданную величину, а именно на время прохождения участка передачи.
Обе информации не должны влиять друг на друга. Из-за высоких временных требований при защитных действиях управляющего устройства или при эксплуатации с высокой частотой переключения силового полупроводникового устройства частота сигналов управления и квитирования может и должна быть выше, чем скорость передачи дополнительной информации.
До сих пор ввиду особых требований к сигналам использовались два различных физических канала передачи. Физическим каналом передачи является соединение, при помощи которого передаются метрологически регистрируемые сигналы. В этом случае оба различных физических канала передачи являются, например двумя различными кабелями, которые не воздействуют друг на друга. Соединение через оптоволокно или беспроводное соединение также является физическим каналом передачи. Так как сигналы в двух кабелях не влияют друг на друга, передача происходит по двум различным каналам передачи.
Описанное выше традиционное решение для передачи связано с дополнительными затратами на эксплуатацию двух различных каналов передачи и с расходами на прокладку физических соединений между управляющим устройством и устройством управления. Передача сигналов управления и сигналов квитирования в переделах протокола обмена данными известных интерфейсов передачи данных, как например Ethernet, Local Operating Network (LON), Controller Area Network (CAN), Universal Serial Bus (USB), не возможна из-за детерминированных по времени требований реального времени сигнала управления и квитирования.
Из EP 2 371 054 A2 известен вентильный преобразователь частоты для питания двигателя, причем между модулем управляющей электроники и соединительным модулем предусмотрен первый интерфейс для передачи сигналов, а между соединительным модулем и модулем тормозного прерывателя, а также между соединительным модулем и каждым фазовым модулем в каждом случае выполнен второй интерфейс для передачи сигналов.
В DE 10 2011 014 753 A1 раскрывается система привода и способ эксплуатации системы привода, которая имеет, по меньшей мере, один электродвигатель, который запитывается от вентильного преобразователя частоты. На двигателе расположены, по меньшей мере, один датчик и исполнительный элемент, причем вентильный преобразователь частоты и двигатель соединены гибридным кабелем. Гибридный кабель имеет линии сильного тока и линии слабого тока, причем в качестве линий слабого тока используются, по меньшей мере, две сигнальные линии и две питающие линии. По сигнальным линиям могут передаваться зарегистрированные датчиками значения и, в частности, со смещением во времени, назначенные для исполнительного элемента управляющие данные.
В WO 2010/060585 A2 раскрывается вентильный преобразователь частоты для питания двигателя, который обнаруживает модуль управляющей электроники для генерации сигналов управления для управляемых полупроводниковых реле, в частности для силовых полупроводниковых реле, а также соединенные в каждом случае с питающей линией двигателя фазовые модули, включающие в себя полупроводниковые реле, и модуль тормозного прерывателя с управляемым полупроводниковым реле, причем между модулем управляющей электроники и соединительным модулем предусмотрен первый интерфейс для передачи сигналов, а между соединительным модулем и модулем тормозного прерывателя, а также между соединительным модулем и каждым фазовым модулем в каждом случае выполнен второй интерфейс для передачи сигналов.
В DE 10 2012 211 312 A1 раскрывается способ для одновременной передачи, по меньшей мере, двух высокочастотных сигналов передачи через общую высокочастотную линию посредством предоставления, по меньшей мере, двух входных сигналов на соответствующих входных интерфейсах для передачи высокочастотных сигналов магнитно-резонансного томографа, причем входными сигналами являются сигналы одинаковой несущей частоты.
В основе изобретения лежит задача по предоставлению способа указанного вначале типа, в котором минимизированы затраты на эксплуатацию физических каналов передачи и расходы на прокладку физического соединения между управляющим устройством и устройством управления.
Согласно изобретению эта задача решается с помощью способа указанного вначале типа за счет того, что передача сигнала управления и первого сигнала данных происходит одновременно и через общий канал передачи, причем первый сигнал данных комбинируется с сигналом управления при помощи метода цифровой модуляции или метода кодирования, причем сигнал квитирования передают вместе со вторым сигналом данных в обратном направлении, причем используют длину кодирования для первого сигнала данных, которая короче чем длина интервала сигнала управления, и/или используют длину кодирования для второго сигнала данных, которая короче чем длина интервала сигнала квитирования.
Подобная операция может осуществляться, например, посредством процесса преобразования. На приемной стороне информация полностью восстанавливается демодулятором или декодером.
Передача сигнала управления и первого сигнала данных происходит по одному общему физическому каналу передачи. Им может быть, например кабель, а также оптоволокно. Так как детерминированные по времени требования реального времени для сигнала управления должны соблюдаться, передача должна происходить одновременно. Это требование не выполняется, например общепринятым способом мультиплексирования с временным разделением, при котором на различных интервалах времени различные сигналы передаются независимо друг от друга.
Преимущества изобретения например при кабельном соединении выражаются в том, что в каждом случае один кабель исключается при передаче сигнала управления, который может быть например коммутационным сигналом, вместе с первым сигналом данных, а также при передаче сигнала квитирования вместе со вторым сигналом данных, и затраты на эксплуатацию интерфейсов соответственно минимизируются. Равным образом сокращаются расходы на прокладку кабелей между управляющим устройством и устройством управления. Дальнейшим преимуществом является то, что благодаря сокращению количества необходимых штекерных соединений уменьшается количество источников механических ошибок по сравнению с уровнем техники, и перекрестные помехи между сигналом управления и первым сигналом данных и соответственно между сигналом квитирования и вторым сигналом данных в принципе отсутствуют.
Сигнал квитирования может генерироваться, например контрольным датчиком, который контролирует силовое полупроводниковое устройство. Преимущество этого варианта осуществления заключается в том, что для передачи дополнительной информации не требуется дополнительного физического канала передачи, и как трудозатраты, так и расходы значительно сокращаются по сравнению с отдельной передачей сигнала квитирования и второго сигнала данных.
Длина кодирования описывает длину бита первого или второго сигнала данных. Так как изменение сигналов управления и сигналов квитирования может происходить только в дискретные моменты времени, возникает неизменная длина интервала для сигнала управления и сигнала квитирования, причем в пределах интервала изменения не происходят. Это является наиболее предпочтительным, так как сигнал управления и сигнал квитирования можно полностью и безошибочно восстанавливать. Длительность передачи состоит из по меньшей мере, двух длин интервала.
Кроме того, задача решается согласно изобретению с помощью блока для выполнения подобного способа, причем блок имеет передатчик, канал передачи и приемник, причем передатчик имеет комбинирующее устройство, которое предусмотрено для комбинирования сигнала управления, по меньшей мере, с одним первым сигналом данных или сигнала квитирования, по меньшей мере, с одним вторым сигналом данных.
Этот блок является предпочтительным, так как для передачи дополнительной информации дополнительный интерфейс не требуется, и как трудозатраты, так и расходы значительно сокращаются по сравнению с отдельным физическим интерфейсом.
Передатчик имеет комбинирующее устройство, которое предусмотрено для комбинирования сигнала управления, по меньшей мере, с одним первым сигналом данных или сигнала квитирования, по меньшей мере, с одним вторым сигналом данных. Это является наиболее предпочтительным, так как эту архитектуру можно реализовывать просто и оптимально с точки зрения аппаратных средств.
Кроме того, задача решается согласно изобретению с помощью системы для цифровой передачи, по меньшей мере, одного сигнала управления и, по меньшей мере, одного первого сигнала данных между управляющим устройством и устройством управления и для цифровой передачи, по меньшей мере, одного сигнала квитирования, по меньшей мере, вместе с одним вторым сигналом данных в обратном направлении, включающей в себя, по меньшей мере, один подобный блок, причем устройство управления предусмотрено для того, чтобы управлять силовым полупроводниковым устройством при помощи аналогового сигнала управления.
Предпочтительно сигнал управления и первый сигнал данных являются приблизительно прямоугольными. Сигнал управления и первый сигнал данных предпочтительно имеют два различных уровня сигнала, которые соответствуют, например "низкому" и "высокому" уровню или уровню "вкл./выкл." и соответственно логическому "0" и логической "1". Это является наиболее предпочтительным, так как комбинацию, например сигнала управления с первым сигналом данных можно реализовывать вследствие этого просто, эффективно и экономично.
Наиболее предпочтительно сигнал управления передается с более высокой скоростью передачи данных, чем первый сигнал данных, и/или сигнал квитирования передается с более высокой скоростью передачи данных, чем второй сигнал данных. При этом длина кодирования предпочтительно меньше, чем длина интервала, причем длительность передачи включает в себя, по меньшей мере, две длины интервала. Это имеет то преимущество, что детерминированные по времени требования реального времени для сигнала управления и сигнала квитирования соблюдаются.
В предпочтительном варианте осуществления первый сигнал данных комбинируется с сигналом управления, и/или второй сигнал данных комбинируется с сигналом квитирования с использованием операции XOR или операции XNOR. Сокращения XOR и XNOR происходят из комбинаторики, причем операция XOR является сокращением для операции "Исключающее ИЛИ", а операция XNOR является сокращением для операции "Исключающее ИЛИ-НЕ".
При операции XOR- или XNOR в переделах длины кодирования сигнал управления логически связывается с первым сигналом данных, а сигнал квитирования логически связывается со вторым сигналом данных посредством операции XOR или операции XNOR. Это имеет то преимущество, что подобную логическую операцию можно просто, эффективно и экономично реализовывать при помощи соответствующей логической схемы.
Наиболее предпочтительно сигнал данных кодируется при помощи фазово-импульсного кодирования и/или широтно-импульсного кодирования, в частности посредством инвертирования.
При фазово-импульсном кодировании или фазово-импульсной модуляции, сокращенно ФИМ, или же кодировании по положению импульса, в пределах длительности передачи в зависимости от значения первого сигнала данных или второго сигнала данных длина кодирования добавляется к различным моментам времени кодирования. В пределах длины кодирования сигнал управления или сигнал квитирования инвертируется.
При широтно-импульсном кодировании или широтно-импульсной модуляции, которая называется также модуляцией по длительности или ширине импульса, в пределах длительности передачи в зависимости от значения первого сигнала данных или второго сигнала данных длина кодирования изменяется. В пределах длины кодирования сигнал управления или сигнал квитирования инвертируется.
Любые комбинации вариантов кодирования возможны. Тем самым можно кодировать многозначные первые или вторые сигналы данных и/или несколько первых или вторых сигналов данных.
В предпочтительном варианте осуществления несколько первых сигналов данных комбинируются с одним сигналом управления, и/или несколько вторых сигналов данных комбинируются с одним сигналом квитирования. Эти сигналы данных могут быть друг от друга зависимы или независимы. Зависимые сигналы данных имеют то преимущество, что может передаваться многозначная информация. Независимые сигналы данных имеют то преимущество, что могут одновременно передаваться дополнительные данные из нескольких источников данных.
В предпочтительном варианте осуществления из сигналов данных нескольких периодов передачи формируется протокол обмена данными. Период (длительность) передачи является соединением нескольких интервалов для передачи одной или нескольких цифровых информаций. Использование протокола обмена данными повышает надежность соединения, так как при помощи протокола может устанавливаться, поступила ли вся информация, и имеются ли ошибки.
В наиболее предпочтительном варианте осуществления приемник имеет устройство, которое предусмотрено для распознавания момента времени синхронизации, по меньшей мере, один битный дешифратор, который предусмотрен для восстановления и выдачи сигнала данных, управляющий дешифратор, который предусмотрен для восстановления и выдачи сигнала управления или сигнала квитирования, и контур фазовой регулировки частоты, который предусмотрен для предоставления опорного момента времени для битного дешифратора и управляющего дешифратора. Эта реализация имеет то преимущество, что приемник может синхронизироваться с передатчиком только при помощи закодированного сигнала, и тем самым исключается дополнительная линия синхронизации.
Далее изобретение описывается и разъясняется более подробно при помощи изображенных на чертежей примеров осуществления.
На чертежах показаны:
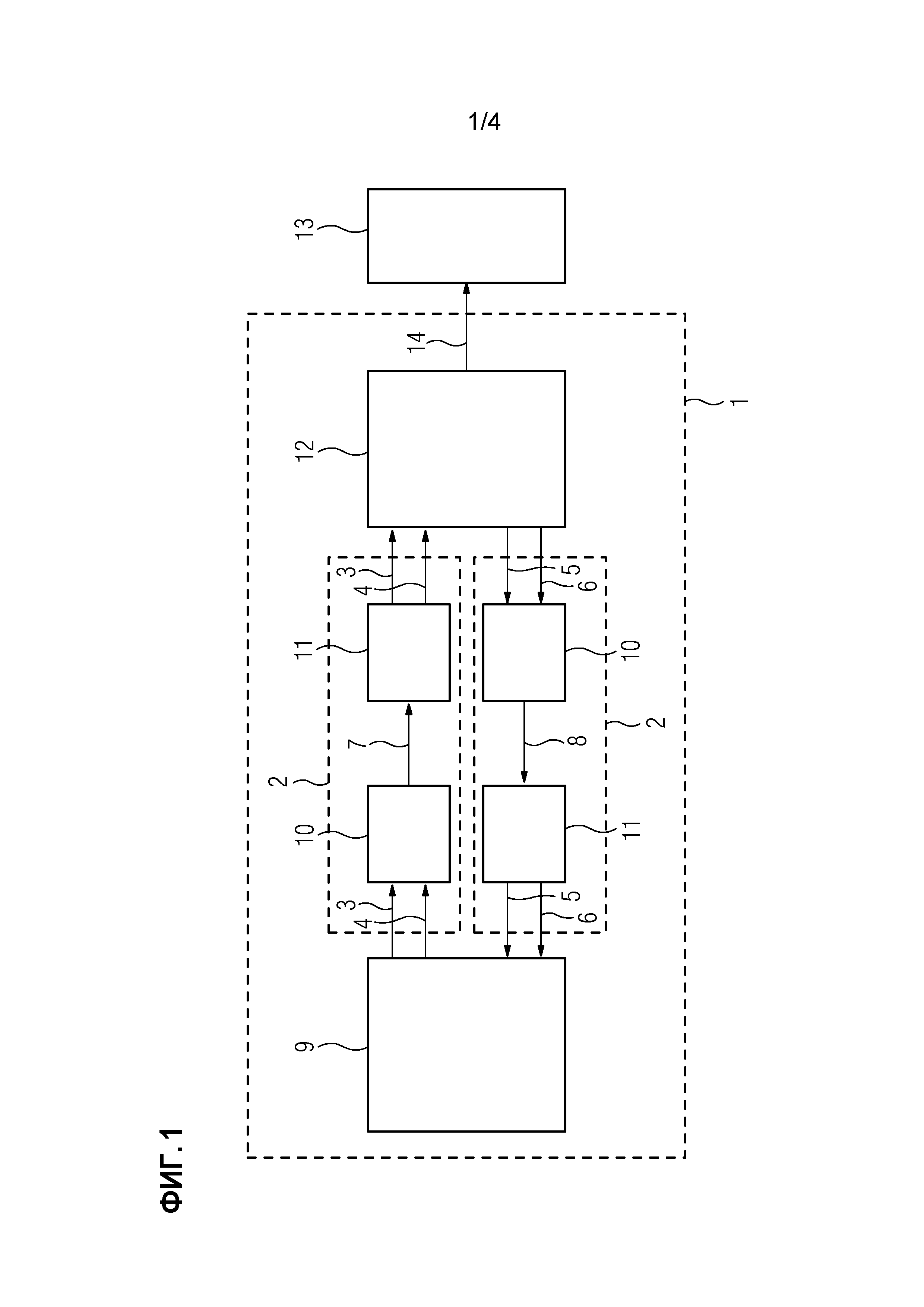
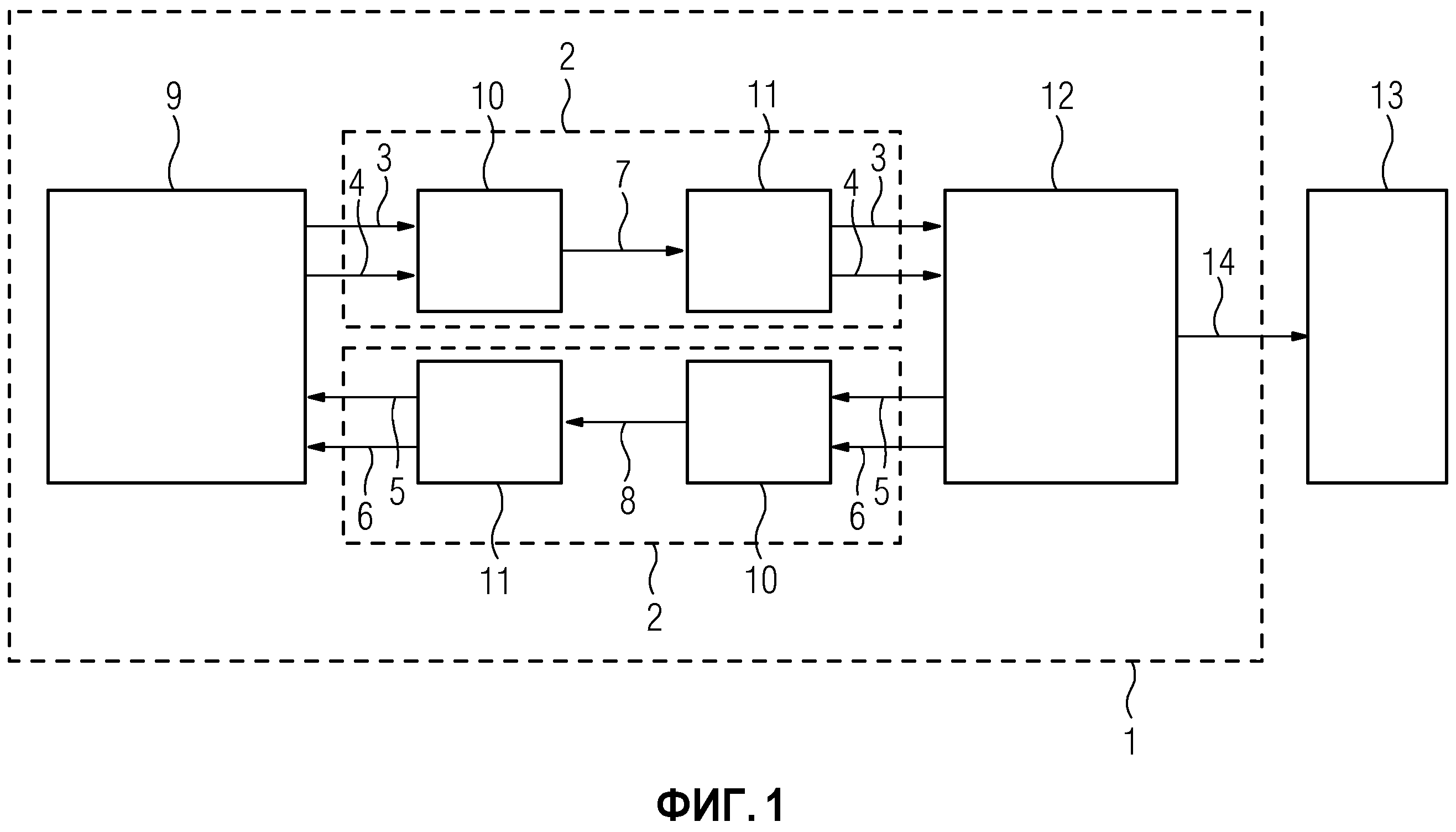
фиг. 1 - схематичное изображение системы для управления силовым полупроводниковым устройством;
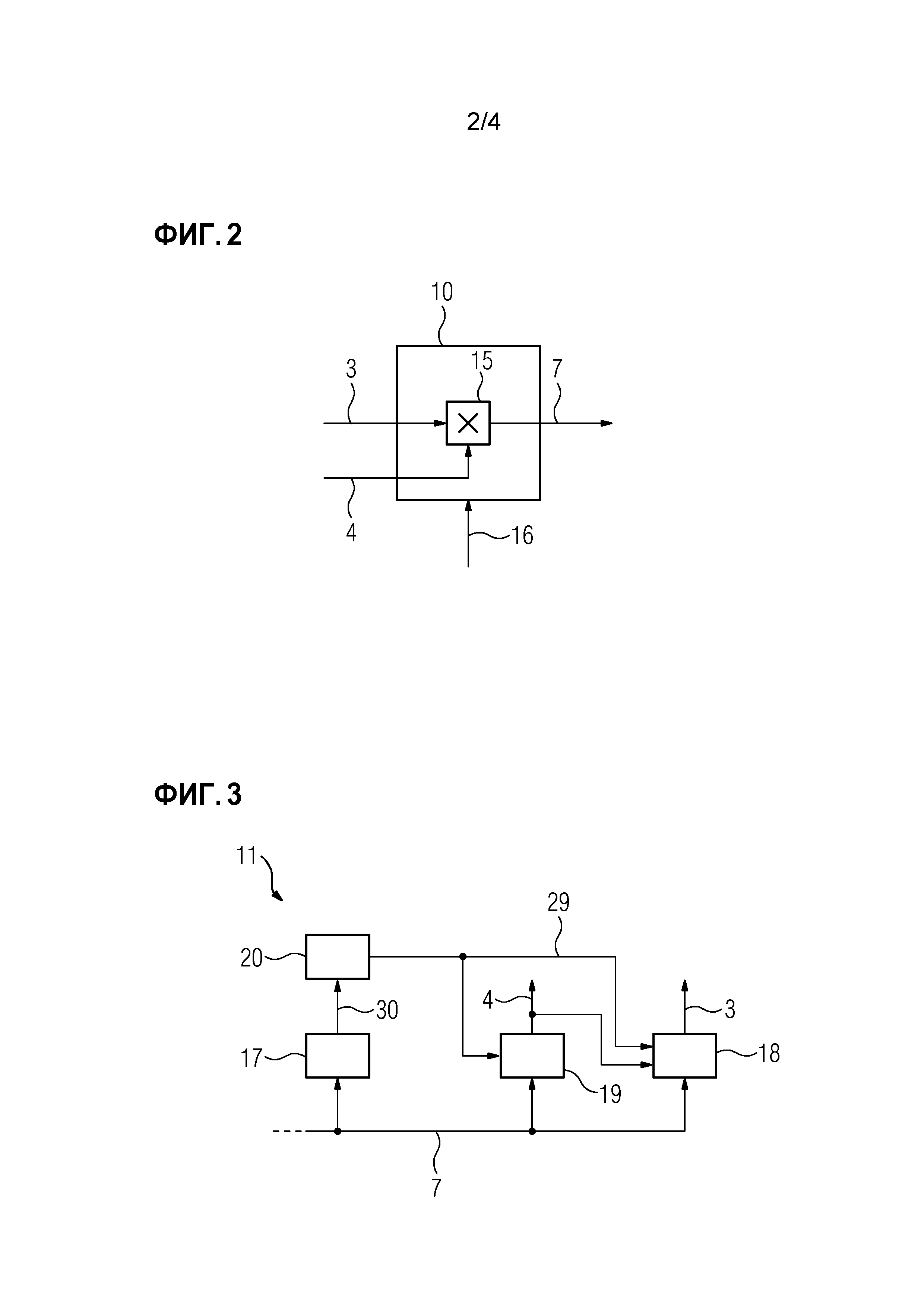
фиг. 2 - схематичное изображение передатчика;
фиг. 3 - схематичное изображение приемника;
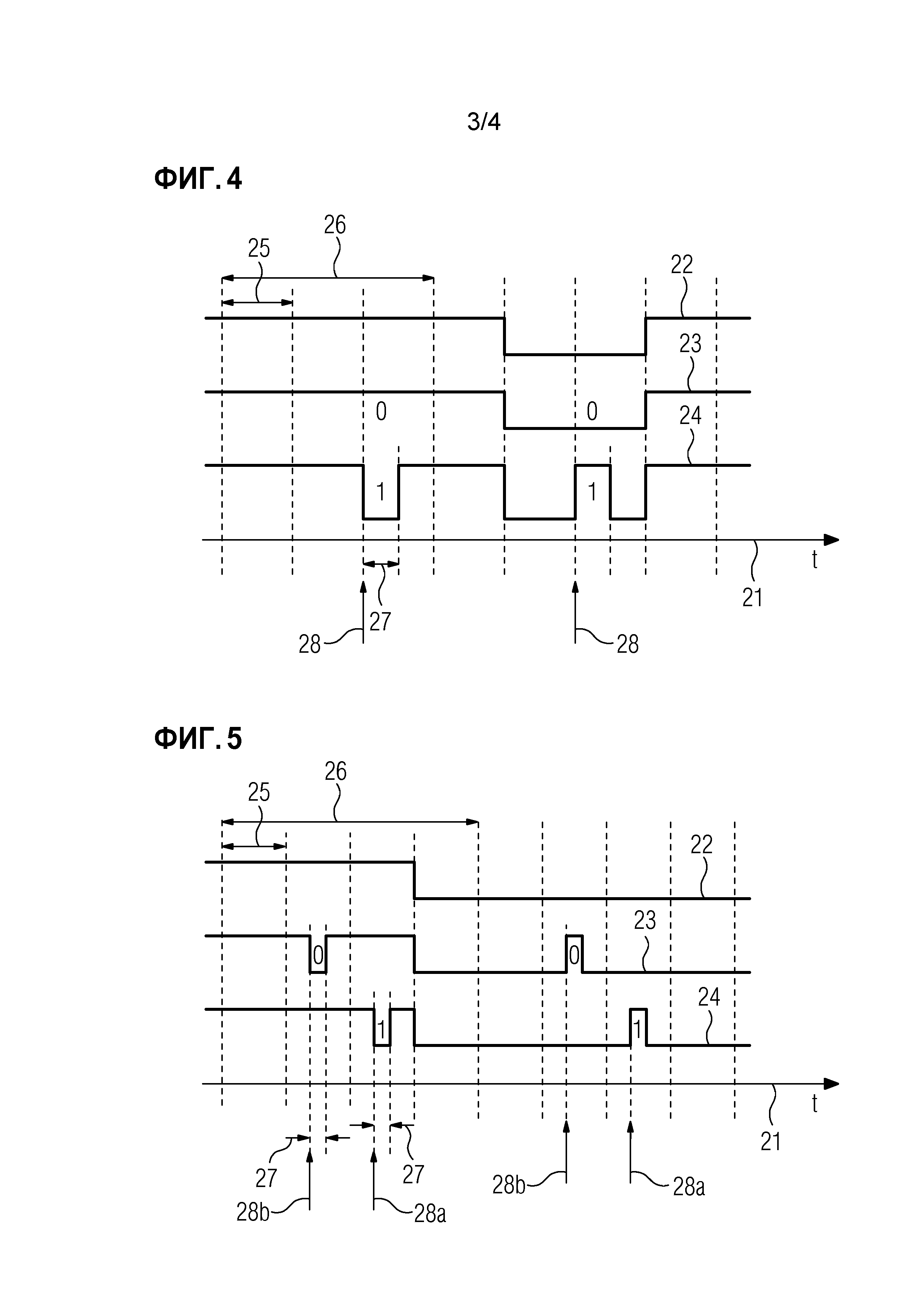
фиг. 4 - временная диаграмма для кодирования незакодированного сигнала управления или сигнала квитирования в каждом случае сигналом данных при помощи операции XOR;
фиг. 5 - временная диаграмма для кодирования незакодированного сигнала управления или сигнала квитирования в каждом случае сигналом данных при помощи фазово-импульсного кодирования; и
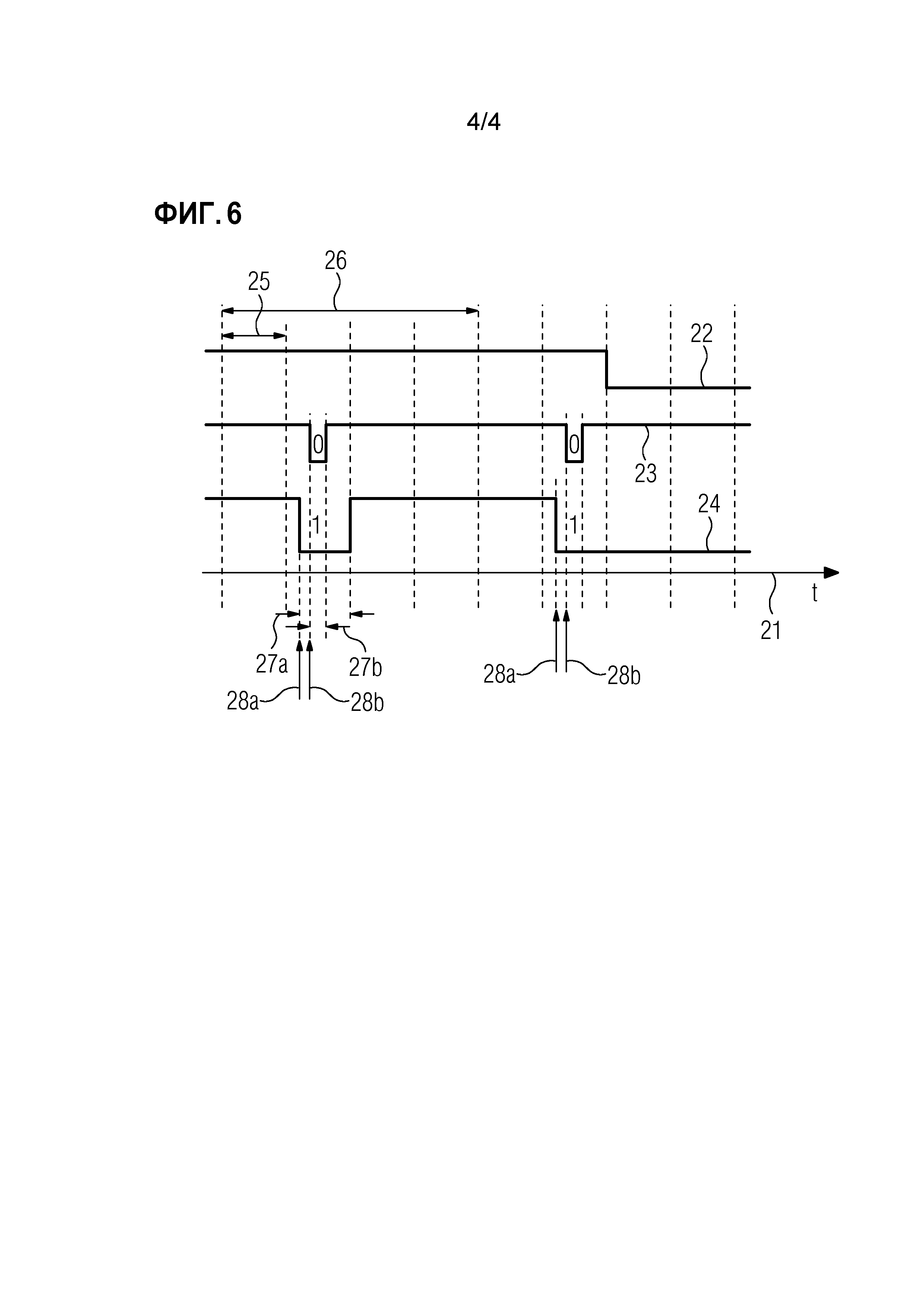
фиг. 6 - временная диаграмма для кодирования незакодированного сигнала управления или сигнала квитирования в каждом случае сигналом данных при помощи широтно-импульсного кодирования.
Фиг. 1 показывает схематичное изображение системы 1 для управления силовым полупроводниковым устройством 13, которое имеет управляющее устройство 9, устройство 12 управления, само силовое полупроводниковое устройство 13, а также два блока 2 для кодирования сигнала 3 управления или сигнала 6 квитирования в каждом случае с сигналом 4, 5 данных. Каждый блок состоит из передатчика 10 и приемника 11. Сигнал 3 управления и первый сигнал 4 данных генерируются управляющим устройством 9 и комбинируются передатчиком 10 в первый закодированный сигнал 7. Из этого сигнала 7 приемником 11 восстанавливается сигнал 3 управления и первый сигнал 4 данных. При помощи устройства 12 управления на силовое полупроводниковое устройство 13 подается сигнал 14 управления. Сигнал 6 квитирования устройства 12 управления силового полупроводникового устройства 13 комбинируется со вторым сигналом 5 данных передатчиком 10 во второй закодированный сигнал 8. Из этого сигнала 8 приемником 11 восстанавливается сигнал 6 квитирования и второй сигнал 5 данных, и эти сигналы возвращаются на управляющее устройство для дальнейшей обработки.
Для модуляции или комбинирования сигналов 3, 4, 5, 6 в этом способе могут использоваться следующие варианты модуляции или кодирования, см. для этого фиг. с 4 по 6: операция XOR- и соответственно операция XNOR, фазово-импульсное кодирование или широтно-импульсное кодирование. Для всех трех вариантов кодирования справедливо следующее:
- длина 27, 27a, 27b кодирования меньше, чем длина 25 интервала;
- длительность 26 передачи состоит, по меньшей мере, из двух длин 25 интервала.
При операции XOR или XNOR в переделах длины 27 кодирования сигнал 3 управления логически связывается с первым сигналом 4 данных, а сигнал 6 квитирования логически связывается со вторым сигналом 5 данных посредством операции XOR или операции XNOR.
При фазово-импульсном кодировании в пределах длительности передачи в зависимости от значения первого сигнала 4 данных или второго сигнала 5 данных длина 27 кодирования добавляется к различным моментам 28a, 28b времени кодирования. В пределах длины 27 кодирования сигнал 3 управления или сигнал 6 квитирования инвертируется.
При широтно-импульсном кодировании в пределах длительности передачи в зависимости от значения первого сигнала 4 данных или второго сигнала 5 данных длина 27a, 27b кодирования изменяется. В пределах длины кодирования сигнал 3 управления или сигнал 6 квитирования инвертируется.
Любые комбинации вариантов кодирования возможны. Тем самым можно кодировать многозначные первые или вторые сигналы данных и/или несколько первых или вторых сигналов данных.
Фиг. 2 показывает схематичное изображение передатчика 10, который имеет комбинирующее устройство 15. В качестве примера изображается кодирование первого закодированного сигнала 7 из сигнала 3 управления и первого сигнала 4 данных. При этом сигнал 3 управления и первый сигнал 4 данных подаются на комбинирующее устройство 15 и комбинируются в первый закодированный сигнал 7. Кроме того, подается опорный тактовый сигнал 16.
Генерация второго закодированного сигнала 8 из сигнала 6 квитирования и второго сигнала 5 данных осуществляется таким же образом.
На фиг. 3 представлено схематичное изображение приемника 11. В приемнике из закодированного сигнала 7, 8 извлекаются сигнал 3 управления или сигнал 6 квитирования и сигнал 4, 5 данных. Для этого закодированный сигнал 7, 8 воспринимается и обрабатывается.
Приемник состоит из устройства 17 для распознавания момента времени синхронизации, контура 20 фазовой регулировки частоты, управляющего дешифратора 18 и битного дешифратора 19.
В качестве примера изображается восстановление сигнала 3 управления и первого сигнала 4 данных из первого закодированного сигнала 7. Первый закодированный сигнал 7 одновременно подается на устройство 17 для распознавания момента времени синхронизации, управляющий дешифратор 18 и битный дешифратор 19. Устройством 17 для распознавания момента времени синхронизации обнаруживается подходящий момент 30 времени синхронизации, который подается на контур 20 фазовой регулировки частоты. Выходной сигнал контура 20 фазовой регулировки частоты предоставляет для управляющего дешифратора 18 и битного дешифратора 19 опорный момент 29 времени. В качестве примера управляющим дешифратором 18 из первого закодированного сигнала 7 восстанавливается сигнал 3 управления, а битным дешифратором 19 первый сигнал 4 данных.
Восстановление сигнала 6 квитирования и второго сигнала 5 данных из второго закодированного сигнала 8 осуществляется таким же образом.
На фиг. 4 изображена временная диаграмма для кодирования незакодированного сигнала управления или сигнала 22 квитирования в каждом случае сигналом данных при помощи операции XOR. Вдоль оси 21 времени проходит незакодированный сигнал управления или сигнал 22 квитирования, который разделяется на несколько интервалов 25 в пределах длительности 26 передачи. Дополнительная информация кодируется для значений "0" или "1" в одинаковых моментах времени в передах длительности передачи посредством операции XOR. Альтернативно кодирование может осуществляться при помощи операции XNOR. В соответствии с таблицей истинности операции XOR- кривая 23 сигнала при кодировании при помощи "0" не изменяется на момент времени 28 кодирования. Напротив кривая 24 сигнала при кодировании при помощи "1" инвертируется на момент времени 28 кодирования для постоянной длины 27 кодирования.
Фиг. 5 показывает временную диаграмму для кодирования незакодированного сигнала управления или сигнала 22 квитирования в каждом случае сигналом данных при помощи фазово-импульсной модуляции или же фазово-импульсного кодирования. В этом варианте кодирования момент 28 времени кодирования варьируется, в то время как длина 27 кодирования остается неизменной. Кривая 23 сигнала при кодировании при помощи "0" инвертируется на момент 28b времени кодирования для "0" на длину 27 кодирования, кривая 24 сигнала при кодировании при помощи "1" инвертируется на момент 28a времени кодирования для "1" на ту же длину 27 кодирования.
Фиг. 6 показывает временную диаграмму для кодирования незакодированного сигнала управления или сигнала 22 квитирования в каждом случае сигналом данных при помощи широтно-импульсной модуляции или же широтно-импульсного кодирования. В этом варианте кодирования кривая сигнала инвертируется на момент 28 времени кодирования в каждом случае. Кривая 23 сигнала при кодировании при помощи "0" и кривая 24 сигнала при кодировании при помощи "1" отличаются друг от друга длиной 27 кодирования. Опционально может дополнительно варьироваться момент 28 времени кодирования. Кривая 23 сигнала при кодировании при помощи "0" инвертируется на момент 28b времени кодирования для "0" на длину 27b кодирования для "0", кривая 24 сигнала при кодировании при помощи "1" инвертируется на момент 28a времени кодирования для "1" на длину 27a кодирования для "1".
Подводя итог, изобретение относится к способу передачи сигнала 3 управления и первого сигнала 4 данных между управляющим устройством 9 и устройством 12 управления силового полупроводникового устройства 13. Для того чтобы минимизировать затраты на эксплуатацию физических каналов передачи и расходы на прокладку физического соединения между управляющим устройством 9 и устройством 12 управления, предлагается то, что передача сигнала 3 управления и первого сигнала 4 данных происходит одновременно и через общий канал передачи, причем первый сигнал 4 данных комбинируется с сигналом 3 управления при помощи метода цифровой модуляции или метода кодирования
Транспортное средство и способ кабельной передачи данных между двумя разъемно соединяемыми друг с другом единицами подвижного состава
Способ и устройство определения направленности дефекта, имеющегося внутри механического конструктивного элемента
Двухтактный усилитель с индуктивной синфазной развязкой
Редукторный двигатель для приводной системы мельницы
Радиальный магнитный подшипник для магнитной опоры ротора
Способ непрерывного магнитного разделения и/или обогащения руды.
Способ удаления увлеченного газа в системе генерирования мощности с комбинированным циклом
Определение степени измельчения измельчаемого материала, в частности руды, в дробилке
Высоковольтная система
Электрический сквозной соединитель для подводных контейнеров

