Результат интеллектуальной деятельности: ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО И ЭЛЕКТРОЛИЗНЫЙ ЗАВОД, СОДЕРЖАЩИЙ ТАКОЕ УСТРОЙСТВО
Вид РИД
Изобретение
Настоящее изобретение относится к транспортировочному устройству, предназначенному для перемещения груза, такого как анодный блок или разливочная емкость электролизного завода, и к электролизному заводу, в частности алюминиевому заводу, содержащему это транспортировочное устройство.
Обычно электролизный завод, такой как алюминиевый завод, содержит здание, в котором находится электролизный цех с линиями, включающими в себя сотни электролизеров, предназначенных для производства алюминия методом Холла-Эру.
Для этого электролизеры обычно содержат стальной корпус, покрытый изнутри огнеупорными материалами, катод из углеродистого материала, через который проходят катодные проводники, предназначенные для отбора электролизного тока на катоде и для его направления на катодные шины, проходящие через дно или через стороны корпуса, переходные проводники, проходящие по существу горизонтально до следующего электролизера от катодных шин, электролитическую ванну, в которой растворяют глинозем, по меньшей мере один анодный блок, содержащий по меньшей мере один анод, погруженный в электролитическую ванну, и анодную штангу, закрепленную в аноде, анодную рамку, к которой подвешен анодный блок через анодную штангу, и восходящие проводники электролизного тока, проходящие снизу вверх и соединенные с переходными проводниками предыдущего электролизера для подачи электролизного тока от катодных шин на анодную рамку и на анодный блок следующего электролизера. Аноды являются, в частности, предварительно обожженными прессованными анодами с предварительно обожженными углеродистыми блоками, то есть блоками, обожженными до введения в электролизер.
Во время электролизной реакции на дне электролизера образуется слой жидкого алюминия. Получаемый жидкий алюминий регулярно собирают в разливочные емкости, называемые также разливочными ковшами. Собранный жидкий алюминий транспортируют в литейный цех для его последующей обработки.
Кроме того, во время электролизной реакции аноды постепенно расходуются. Поэтому необходимо предусматривать удаление отработавших анодных блоков и регулярное снабжение электролизеров новыми анодными блоками, предназначенными для замены отработавших анодных блоков.
Анодные блоки и разливочные емкости могут весить несколько тонн. Поэтому без соблюдения соответствующих мер безопасности их транспортировка может стать причиной происшествий, опасных для персонала и для оборудования.
Транспортировку анодных блоков и разливочных емкостей обеспечивают транспортировочные устройства, управляемые оператором-водителем. Для уменьшения рисков происшествий эти устройства содержат средства ограничения их скорости, чтобы она не могла превышать заранее определенную максимальную скорость.
Однако, учитывая массу перемещаемых грузов, эти транспортировочные устройства имеют большие размеры, которые могут затруднять обзор для операторов-водителей и для пешего персонала, в частности, во время сложных маневров.
Как известно, эти транспортировочные устройства могут быть оснащены системами обнаружения, выполненными с возможностью обнаружения препятствия в заранее определенной зоне обнаружения и подачи команды на остановку транспортировочного устройства, чтобы избежать столкновения при обнаружении препятствия.
Однако эта зона обнаружения определена заранее и не зависит от кинематики транспортировочного устройства, поэтому такая система обнаружения и такое транспортировочное устройство могут применяться только для фиксированной окружающей среды, где препятствия уже известны на пути транспортировочного устройства.
Иначе говоря, такие системы не обеспечивают маневрирования транспортировочного устройства в окружающей среде, содержащей подвижные препятствия, такие как пеший персонал или другие транспортировочные средства.
Однако транспортировочные устройства перемещаются в электролизном заводе как снаружи, так и внутри, где регулярно появляется пеший или передвигающийся на транспортировочных средствах персонал.
Кроме того, система обнаружения с заранее определенной и неизменной зоной обнаружения в окружающей среде, которая сочетает в себе как большие прямые линии (снаружи), так и ограниченные пространства (внутри), неизбежно приводит к несвоевременным остановкам транспортировочного устройства, оборудованного такой системой.
Действительно, зона обнаружения такой системы является, например, слишком широкой по отношению к скорости транспортировочного устройства, когда оно совершает маневры внутри: при любом развороте транспортировочного устройства зона обнаружения может встретить препятствие, которое не обязательно находится на пути следования транспортировочного устройства, что может привести к непредвиденной остановке. Точно так же, при повороте слишком большая зона обнаружения спереди транспортировочного устройства может привести к тому, что за препятствие принимают барьер, находящийся вдоль поворота, тогда как этот барьер находится за пределами траектории транспортировочного устройства.
В документе US 20110077814 было предложено оборудовать транспортировочное устройство средствами обнаружения препятствий, выполненными с возможностью обнаружения препятствия в зоне обнаружения, которая зависит от скорости перемещения транспортировочного устройства.
Однако стыковка транспортировочного устройства с грузом представляет собой сложный маневр. Стыкуемый груз не должен обнаруживаться как препятствие, поэтому часть транспортировочного устройства, предназначенная для стыковки обычно не содержит средств обнаружения препятствия. Вместе с тем, существует риск случайного присутствия человека или предмета между транспортировочным устройством и грузом во время маневра стыковки.
Задачей настоящего изобретения является устранение недостатков известного уровня техники и разработка транспортировочного устройства, выполненного с возможностью обнаружения препятствия в любых обстоятельствах, в том числе во время маневра стыковки, и с возможностью перемещения в сложной окружающей среде, которая может включать в себя подвижные препятствия, не совершая непредвиденных остановок, а также электролизный завод, характеризующийся повышенной производительностью.
В связи с этим объектом настоящего изобретения является транспортировочное устройство, содержащее средства стыковки, выполненные с возможностью стыковки с предназначенным для перемещения грузом, в частности, с анодным блоком или с разливочной емкостью электролизного завода, при этом транспортировочное устройство содержит:
- средства дистанционного обнаружения препятствия, выполненные с возможностью сканирования зоны обнаружения, смежной с транспортировочным устройством,
- средства сбора кинематической данной, предназначенные для сбора одной или нескольких кинематических данных, относящихся к кинематике транспортировочного устройства,
- блок обработки, предназначенный для определения, внутри зоны обнаружения, зоны контроля, отслеживаемой средствами дистанционного обнаружения препятствия, при этом форму зоны контроля рассчитывает блок обработки в зависимости от кинематической данной или кинематических данных, поступающих от средств сбора,
при этом транспортировочное устройство дополнительно содержит средства контактного обнаружения препятствия, расположенные на участке транспортировочного устройства, который должен находиться напротив стыкуемого груза во время маневра стыковки, и
средства торможения, предназначенные для торможения и/или остановки транспортировочного устройства при обнаружении препятствия в зоне контроля или при соприкосновении с ним средств контактного обнаружения препятствия.
Таким образом, заявленное транспортировочное устройство обеспечивает возможность автоматической адаптации формы и размеров зоны контроля в зависимости от кинематики транспортировочного устройства, продублированную возможностью контактного обнаружения препятствия, такого как человек, который может оказаться между транспортировочным устройством и грузом во время маневра стыковки. Следовательно, заявленное транспортировочное устройство обеспечивает повышенную безопасность и возможность перемещения в сложной окружающей среде, избегая непредвиденных остановок.
Согласно предпочтительному варианту выполнения, средства дистанционного обнаружения препятствия содержат несколько блоков обнаружения, каждый из которых предназначен для сканирования локальной зоны обнаружения, и блоки обнаружения расположены относительно друг друга таким образом, чтобы локальные зоны обнаружения образовали вместе периферическую зону обнаружения, простирающуюся на 360° вокруг транспортировочного устройства.
Таким образом, безопасный периметр вокруг транспортировочного устройства ограничен при соблюдении максимальной безопасности.
Предпочтительно каждая локальная зона обнаружения имеет по меньшей мере один участок перекрывания со смежной локальной зоной обнаружения.
Таким образом, обнаружение препятствия продублировано, то есть препятствие, оказывающееся в периметре контроля, находится в двух перекрывающих друг друга локальных зонах обнаружения.
Согласно варианту выполнения, периферическая зона обнаружения содержит по меньшей мере четыре участка перекрывания, в том числе передний участок перекрывания, находящийся перед транспортировочным устройством, задний участок перекрывания, находящийся сзади транспортировочного устройства, и два боковых участка перекрывания, находящиеся с каждой стороны транспортировочного устройства.
Таким образом, в любой точке зоны контроля препятствие обязательно обнаруживается двумя блоками обнаружения, и эта избыточность еще больше повышает надежность при высоком уровне безопасности.
Согласно предпочтительному варианту выполнения, на основании кинематических данных блок обработки определяет, что транспортировочное устройство совершает маневр стыковки, и определяет соответствующую зону (10) контроля во время маневра стыковки. Такой маневр стыковки может происходить автоматически, с учетом конкретной обстановки и в условиях безопасности.
Согласно предпочтительному варианту выполнения, кинематические данные, позволяющие блоку обработки определить, что транспортировочное устройство совершает маневр стыковки, и определить соответствующую зону контроля во время маневра стыковки, представляют собой заранее определенный диапазон скорости в направлении маневра стыковки. В частности, заранее определенный диапазон скорости составляет от 0 до 3 км/ч и предпочтительно от 0,5 до 2 км/ч.
Согласно предпочтительному варианту выполнения, кинематические данные, позволяющие блоку обработки определить, что транспортировочное устройство совершает маневр стыковки, и определить соответствующую зону контроля во время маневра стыковки, представляют собой сохранение заранее определенной постоянной скорости в течение определенного времени. В частности, эта заранее определенная постоянная скорость может составлять от 0,5 до 2,5 км/ч, предпочтительно от 1 до 2 км/ч и предпочтительно примерно 1,8 км/ч. Предпочтительно допуск блока обработки составляет плюс или минус 0,5 км/ч и предпочтительно плюс или минус 0,1 км/ч. Определенное время может составлять от 0,1 до 2 секунд и предпочтительно меньше 1 секунды.
Согласно предпочтительному варианту выполнения, зона контроля содержит во время маневра стыковки заранее определенную мертвую зону, не контролируемую средствами дистанционного обнаружения препятствия, при этом мертвая зона находится между транспортировочным устройством и стыкуемым грузом, при этом средства контактного обнаружения препятствия выполнены с возможностью обнаружения препятствия в мертвой зоне.
Таком образом, обеспечено обнаружение препятствия, которое может оказаться между транспортировочным устройством и стыкуемым грузом.
Согласно предпочтительному варианту выполнения, зона контроля содержит по меньшей мере две подзоны контроля, которые расположены вдоль мертвой зоны. Эти подзоны контроля предупреждают и препятствуют появлению пешего персонала или механизмов в мертвой зоне во время маневра стыковки. В частности, мертвая зона является прямоугольной, и с каждой из ее сторон находятся одна из двух подзон контроля, транспортировочное устройство или стыкуемый груз.
Согласно предпочтительному варианту выполнения, транспортировочное устройство содержит шасси U-образной формы, содержащее два по существу параллельных боковых участка, между которыми расположены средства стыковки и которые соединены центральным участком, при этом средства контактного обнаружения препятствия содержат первый элемент обнаружения, расположенный внутри U на центральном участке.
Это позволяет обнаруживать препятствие, которое может оказаться внутри U во время маневра стыковки, чтобы избежать его зажатия между транспортировочным устройством, в частности его центральным участком, и стыкуемым грузом.
Согласно предпочтительному варианту выполнения, средства контактного обнаружения препятствия содержат второй элемент обнаружения и третий элемент обнаружения, расположенные на конце боковых участков.
Предпочтительно зона контроля содержит во время маневра стыковки две отдельные подзоны контроля, каждая из которых проходит от конца боковых участков в направлении, по существу параллельном направлению перемещения транспортировочного устройства.
Это позволяет избегать столкновения с предметом, присутствующим вблизи стыкуемого груза во время маневра стыковки.
Предпочтительно отдельные подзоны контроля проходят от транспортировочного устройства до сторон стыкуемого груза, перед тем как стыкуемый груз окажется внутри шасси U-образной формы. Расположение этих подзон контроля предупреждает и препятствует появлению пешего персонала или механизмов между транспортировочным устройством и стыкуемым грузом.
Согласно предпочтительному варианту выполнения, транспортировочное устройство содержит средства распознавания формы, предназначенные для распознавания формы стыкуемого груза во время маневра стыковки.
Так, если во время маневра стыковки форма стыкуемого груза не распознана, то есть если форма, визуально наблюдаемая во время маневра стыковки, изменилась по отношению к известной форме перемещаемого груза (эта форма всегда остается одинаковой), это значит, что вблизи стыкуемого груза находится человек или предмет. В этом случае включается защитное действие, в частности, торможение и остановка транспортировочного устройства. Это позволяет повысить безопасность.
Согласно предпочтительному варианту выполнения, средства сбора кинематической данной содержит датчик нагрузки, позволяющий определить, загружено или не загружено транспортировочное устройство. Если транспортировочное устройство уже загружено, оно не может осуществлять маневр стыковки.
Согласно предпочтительному варианту выполнения, средства дистанционного обнаружения препятствия и средства контактного обнаружения препятствия расположены максимум на 350 мм от земли, в частности, не более 300 мм от земли и еще предпочтительнее не более 200 мм от земли.
Таким образом, транспортировочное устройство может обнаруживать лежащее на земле препятствие небольшой высоты.
Согласно предпочтительному варианту выполнения, транспортировочное устройство содержит средство автоматического направления для своего автономного перемещения в электролизном заводе, и средства дистанционного обнаружения препятствия и средства контактного обнаружения препятствия являются независимыми от средств автоматического направления.
Таким образом, в случае отказа средств автоматического направления обнаружение препятствия по-прежнему обеспечивается с максимальной безопасностью.
Другим объектом изобретения является также электролизный завод, в частности, алюминиевый завод, содержащий по меньшей мере одно транспортировочное устройство с вышеупомянутыми отличительными признаками.
Этот алюминиевый завод имеет повышенный уровень безопасности. Риск непредвиденного происшествия для людей или оборудования значительно снижен по сравнению с традиционным алюминиевым заводом, поэтому производительность алюминиевого завода в соответствии с изобретением намного повысилась.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания варианта осуществления настоящего изобретения, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
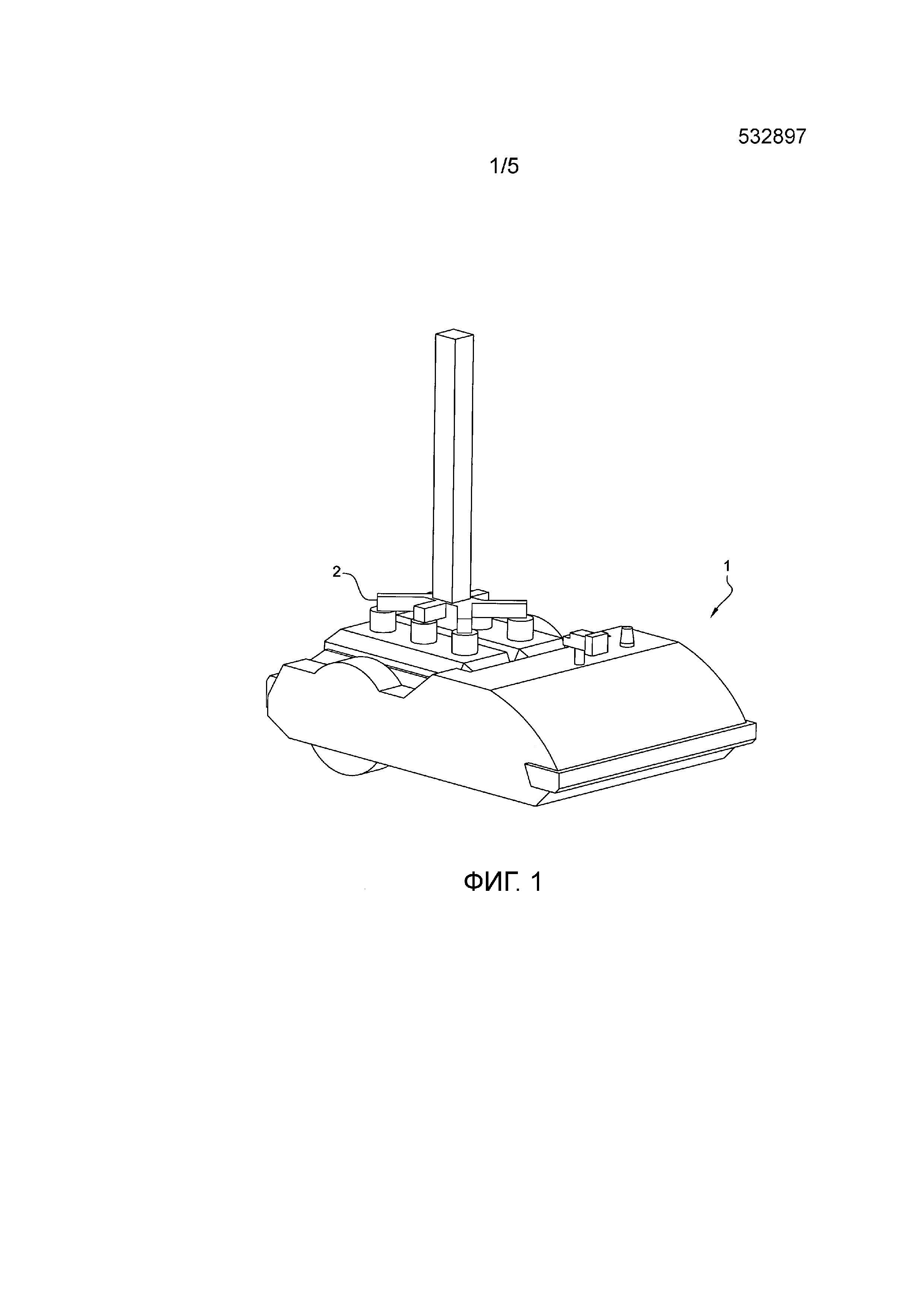
фиг. 1 изображает вид в изометрии транспортировочного устройства согласно варианту выполнения изобретения;
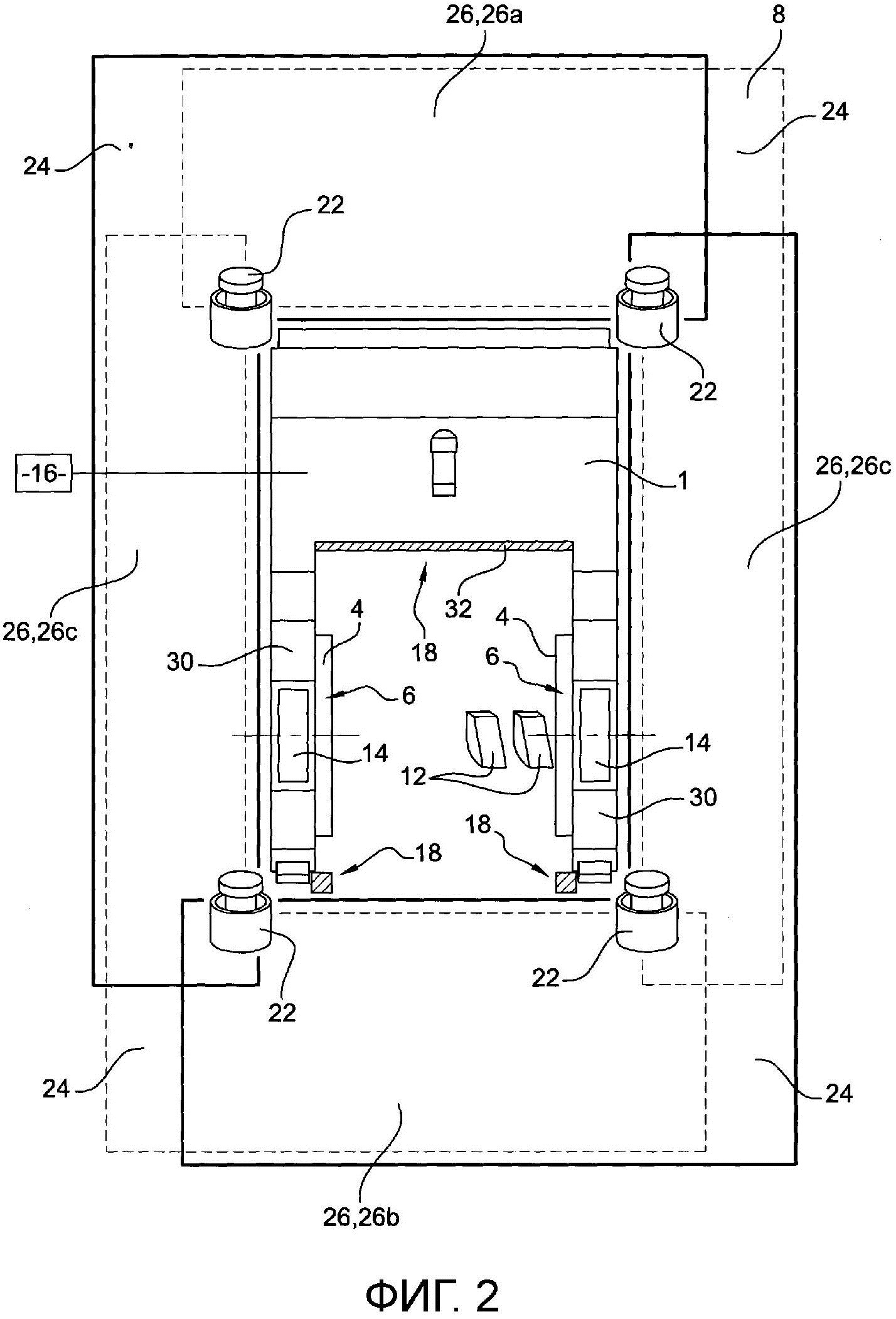
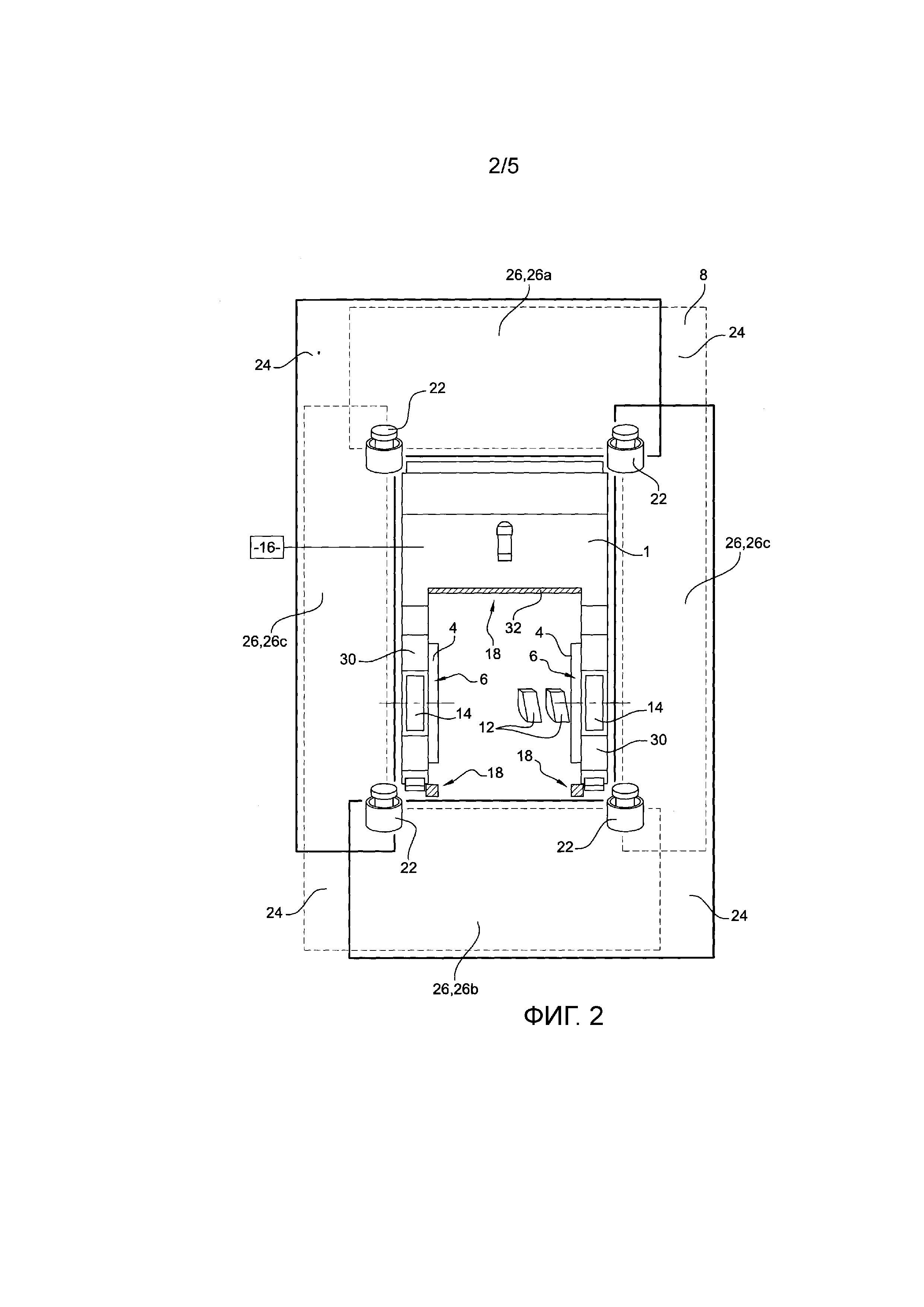
фиг. 2 - схематичный вид сверху транспортировочного устройства согласно варианту выполнения изобретения, движущегося по прямой линии;
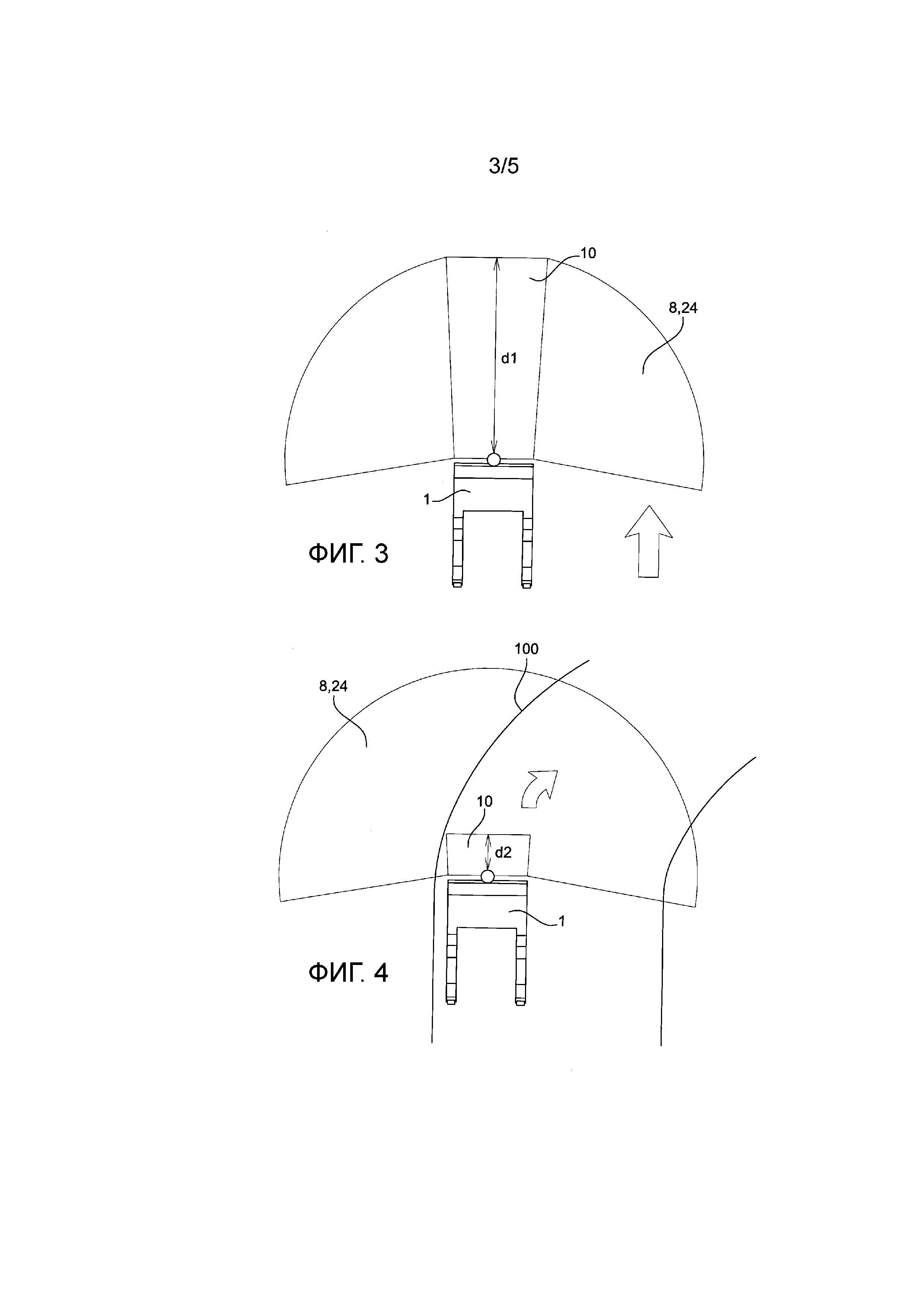
фиг. 3 - схематичный вид сверху транспортировочного устройства согласно варианту выполнения изобретения, движущегося на повороте;
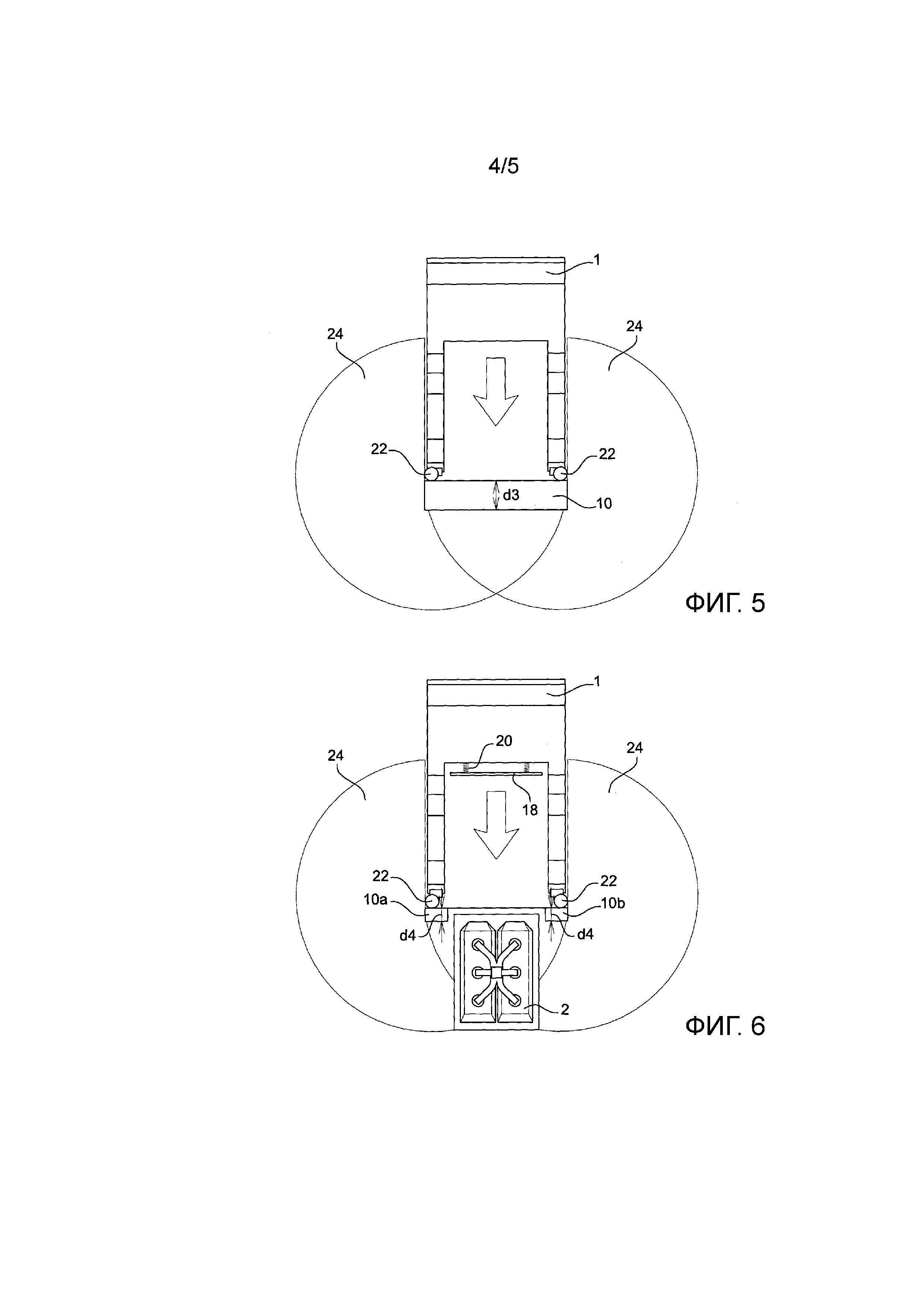
фиг. 4 - схематичный вид сверху транспортировочного устройства согласно варианту выполнения изобретения, движущегося задним ходом;
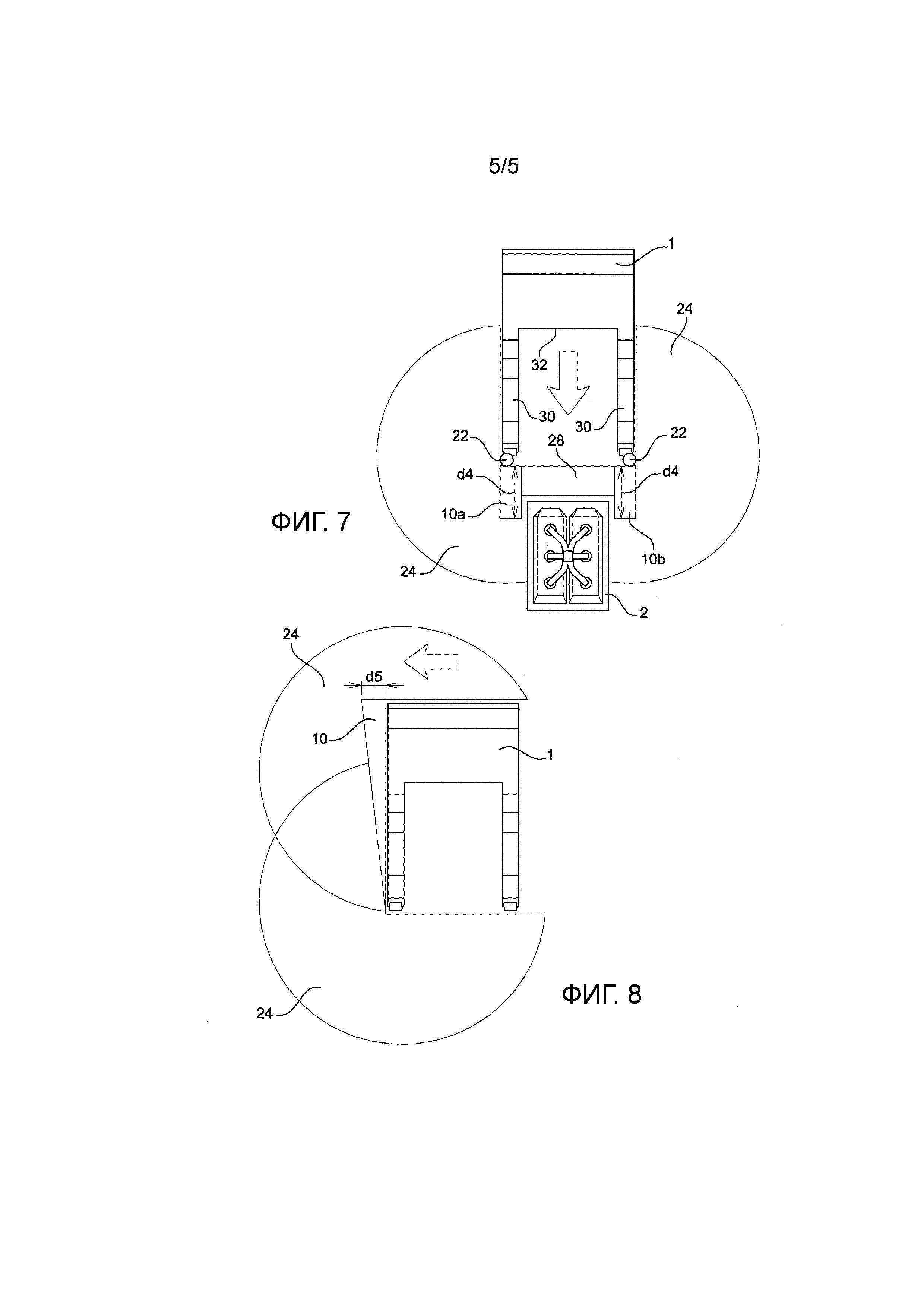
фиг. 6 и 7 изображают схематичный вид сверху транспортировочного устройства согласно варианту выполнения изобретения во время маневра стыковки;
фиг. 8 изображает схематичный вид сверху транспортировочного устройства согласно варианту выполнения изобретения, осуществляющего разворот.
На фиг. 1 показано транспортировочное устройство 1 согласно варианту выполнения изобретения.
Транспортировочное устройство 1 предназначено для перемещения груза в электролизном заводе, таком как алюминиевый завод. Например, перемещаемым грузом может быть анодный блок 2 или разливочная емкость (не показана), предназначенная для жидкого металла, такого как алюминий.
Для этого транспортировочное устройство 1 содержит средства стыковки с перемещаемым грузом. Средства стыковки могут быть предназначены для размещения и закрепления на них перемещаемого груза.
Например, средства стыковки содержат уголки 4 L-образной формы, имеющие опорную поверхность 6 для размещения площадки, на которой укладывают, например, анодный блок.
Транспортировочное устройство 1 содержит также средства дистанционного обнаружения препятствия, которые будут более подробно описаны ниже.
Средства дистанционного обнаружения препятствия предназначены для сканирования зоны 8 обнаружения, смежной с транспортировочным устройством 1.
Зона 8 обнаружения соответствует максимальной зоне, которая может быть охвачена средствами дистанционного обнаружения препятствия. Однако обнаружение препятствия является эффективным в зоне, называемой зоной 10 контроля, которая не является фиксированной и соответствует части зоны 8 обнаружения, как показано на фиг. 3-8.
Транспортировочное устройство 1 содержит также средства сбора кинематической данной.
Эти средства сбора предназначены для сбора одной или нескольких данных, относящихся к кинематике транспортировочного устройства.
Кинематическую данную или кинематические данные можно выбирать из группы, в которую входят скорость транспортировочного устройства 1, направление его расположения, направление его перемещения, характеристики торможения транспортировочного устройства 1 и/или масса транспортировочного устройства 1, включая его груз.
Средства сбора содержат, например, один или несколько кодирующих устройств 12. Кодирующее устройство или кодирующие устройства 12 могут быть расположены на уровне одного или нескольких колес 14 транспортировочного устройства 1.
Транспортировочное устройство 1 содержит также блок 16 обработки, схематично показанный на фиг. 2.
Блок 16 обработки предназначен для определения, внутри зоны 8 обнаружения, зоны 10 контроля, контролируемой средствами дистанционного обнаружения препятствия.
В частности, блок 16 обработки рассчитывает форму и размеры зоны 10 контроля в зависимости от кинематической данной или кинематических данных, поступающих от средств сбора.
Блок 16 обработки может рассчитать форму и размеры зоны 10 контроля в зависимости от дополнительной факультативной информации, такой как информация о наружных климатических условиях (например, дождь). Транспортировочное устройство 1 может содержать, в частности, один или несколько датчиков, предназначенных для передачи в блок 16 обработки одной или нескольких данных, таких как метеорологическая данная (например, мокрая дорога).
Транспортировочное устройство содержит средства торможения, предназначенные для торможения и предпочтительно остановки транспортировочного устройства в случае обнаружения препятствия в зоне 10 контроля средствами дистанционного обнаружения препятствия.
Эти средства торможения могут содержать, например, один или несколько тормозных дисков, связанных с одним или несколькими колесами 14 транспортировочного устройства 1.
Эти средства торможения могут быть отличными от главной тормозной системы, классически применяемой в транспортировочном устройстве 1.
Так, например, зона 10 контроля расположена спереди транспортировочного устройства 1, когда оно передвигается передним ходом, как показано на фиг. 3 и 4. По существу она соответствует проекции передней стороны транспортировочного устройства в направлении перемещения транспортировочного устройства 1 на расстоянии, позволяющем ему, учитывая его скорость и его характеристики торможения, а также его массу (в случае необходимости, включая груз), обнаруживать препятствие достаточно рано, чтобы можно было остановиться до столкновения с этим препятствием.
Как показано на фиг. 2, средства дистанционного обнаружения препятствия содержат несколько блоков 22 обнаружения, каждый из которых предназначен для сканирования локальной зоны 24 обнаружения, соответствующей фиксированной части зоны 8 обнаружения. Локальные зоны 24 обнаружения схематично показаны на фиг. 2 сплошными и пунктирными линиями.
Каждый блок 22 обнаружения может соответствовать, например, оптоэлектронному следящему элементу, такому как лазер или камеры, выполненному с возможностью сканирования локальной зоны 24 обнаружения.
Как показано схематично на фиг. 2, блоки 22 обнаружения расположены относительно друг друга таким образом, чтобы их локальные зоны 24 обнаружения образовали вместе зону 8 обнаружения, простирающуюся на 360° вокруг транспортировочного устройства.
Например, транспортировочное устройство 1 является по существу прямоугольным и содержит четыре блока 33 обнаружения, расположенные на четырех углах транспортировочного устройства 1.
Как показано на фиг. 2, предпочтительно каждая локальная зона 24 обнаружения имеет по меньшей мере один участок 26 перекрывания со смежной локальной зоной 24 обнаружения.
В частности, периферическая зона 8 обнаружения может включать в себя по меньшей мере четыре участка 26 перекрывания, в том числе передний участок 26а перекрывания, находящийся спереди транспортировочного устройства 1, задний участок 26b перекрывания, находящийся сзади транспортировочного устройства 1, и два боковых участка 26с перекрывания, находящиеся с каждой стороны транспортировочного устройства 1.
Как показано на фиг. 3, транспортировочное устройство 1 перемещается по прямой линии. Его скорость по существу является более высокой, чем когда транспортировочное устройство 1 перемещается на повороте (фиг. 4) или задним ходом (фиг. 5) или осуществляет маневр стыковки (фиг. 6 и 7) или разворот (фиг. 8). Например, скорость транспортировочного устройства 1 составляет примерно 25 км/ч на прямой линии, примерно 7 км/ч на повороте, примерно 5 км/ч задним ходом и внутри зданий, примерно 1 км/ч во время разворота.
Таким образом, можно уменьшить размеры зоны 10 контроля, когда транспортировочное устройство движется на повороте или задним ходом, или осуществляет маневр стыковки или разворот, поэтому транспортировочное устройство 1 не обнаруживает, например, предмет, такой как барьер 100 или бордюр, ограничивающий поворот (фиг. 4), что позволяет избегать непредвиденных остановок и одновременно обеспечивать высокий уровень безопасности.
В качестве иллюстративных примеров можно отметить, что зона 10 контроля на прямой линии простирается по длине спереди транспортировочного устройства 1 на расстоянии d1 порядка 7 м по меньшей мере при скорости транспортировочного устройства 1 порядка 25 км/ч, причем это расстояние является минимальным в сухую погоду и увеличивается в дождливое время. На повороте зона 10 контроля может простираться на расстояние d2 порядка 1 м по меньшей мере при скорости транспортировочного устройства 1 порядка 7 км/ч. При движении классическим задним ходом зона 10 контроля может простираться на расстояние d3 порядка 60 см при скорости транспортировочного устройства 1 порядка 5 км/ч.
При движении передним и задним ходом без маневра стыковки ширина зоны 10 контроля по существу соответствует ширине транспортировочного устройства 1.
При движении передним и задним ходом зона 10 контроля может иметь по существу прямоугольную и слегка трапециевидную форму для обеспечения расхождений на безопасном расстоянии, как показано на фиг. 3 и 4.
При развороте, как показано на фиг. 8, зона 10 контроля может иметь по существу треугольную форму вдоль части транспортировочного устройства 1, которая наиболее удалена от оси вращения при развороте. Одна из сторон треугольника, расположенная по существу перпендикулярно к одной из сторон транспортировочного устройства 1, может проходить на расстоянии d5 порядка 20 см. Другая сторона треугольника проходит по существу по всей длине стороны транспортировочного устройства 1, вокруг которой осуществляют разворот.
Во время маневра стыковки, когда скорость является низкой, зона 10 контроля может простираться на расстояние d4 порядка 10 см.
Согласно другому примеру, обнаружение осуществления маневра стыковки транспортировочным устройством и вычисление соответствующей надлежащей зоны 10 контроля происходят, когда средства 11 сбора и блок 16 обработки обнаруживают, что скорость транспортировочного устройства находится в некотором заранее определенном диапазоне скорости. Этот заранее определенный диапазон скорости может составляет от 0 до 3 км/ч в направлении маневра стыковки и предпочтительно составляет от 0,5 до 2 км/ч.
Транспортировочное устройство может также содержать датчик нагрузки, позволяющий передавать в блок 16 обработки информацию, в соответствии с которой транспортировочное устройство является нагруженным или не нагруженным. В случае, когда транспортировочное устройство нагружено, блок 16 обработки знает, что транспортировочное устройство осуществляет простое перемещение, в данном случае задним ходом, а не маневр стыковки, даже если скорость транспортировочного устройства находится в заранее определенном диапазоне скорости.
Согласно другому примеру, обнаружение осуществления маневра стыковки транспортировочным устройством и вычисление соответствующей надлежащей зоны 10 контроля происходят, когда средства 11 сбора и блок 16 обработки обнаруживают, что скорость транспортировочного устройства соответствует в течение определенного времени постоянной скорости, заранее определенной как скорость стыковки.
В этом случае кинематические данные, позволяющие блоку 16 обработки определить, что транспортировочное устройство осуществляет маневр стыковки, и определить соответствующую зону 10 контроля во время маневра стыковки, включают в себя сохранение в течение определенного времени заранее определенной постоянной скорости. Заранее определенная постоянная скорость составляет от 0,5 до 2,5 км/ч, предпочтительно от 1 до 2 км/ч и предпочтительно составляет порядка 1,8 км/ч с допуском плюс или минус 0,5 км/ч и предпочтительно плюс или минус 0,1 км/ч. Определенное время составляет от 0,1 до 2 секунд и предпочтительно меньше 1 секунды.
Как схематично показано на фиг. 7, во время маневра стыковки зона 10 контроля содержит заранее определенную мертвую зону 28, которую не контролируют средства дистанционного обнаружения препятствия и которая находится между транспортировочным устройством и стыкуемым грузом, в данном случае анодным блоком 2. Таким образом, транспортировочное устройство 1 может стыковаться с грузом, избегая непредвиденной остановки по причине обнаружения груза в качестве препятствия средствами дистанционного обнаружения препятствия.
Необходимо отметить, что транспортировочное устройство дополнительно содержит средства контактного обнаружения препятствия, например, упор 18, схематично показанный на фиг. 2 и 6, в частности, в виде плиты, соединенной с транспортировочным устройством 1 при помощи одного или нескольких возвратных элементов 20.
Средства контактного обнаружения препятствия расположены на участке транспортировочного устройства, который должен быть направлен в сторону стыкуемого груза во время маневра стыковки. Согласно примеру, показанному на фиг. 1-8, средства контактного обнаружения препятствия являются, таким образом, видимыми сзади транспортировочного устройства.
Как только средства контактного обнаружения препятствия соприкасаются с препятствием, происходит активация средств торможения для торможения и остановки транспортировочного устройства.
Средства контактного обнаружения препятствия выполнены с возможностью обнаружения препятствия, которое может находиться в мертвой зоне 28.
Согласно примеру, показанному на фиг. 1-8, транспортировочное устройство 1 содержит шасси U-образной формы, содержащее два по существу параллельных боковых участка 30, между которыми расположены средства стыковки, и которые соединены центральным участком 32.
Средства контактного обнаружения препятствия содержат первый элемент обнаружения, такой как внутренний упор 18, расположенный внутри U и соединенный с центральным участком 32, как показано на фиг. 2.
Использование внутреннего упора 18 представляет интерес с точки зрения безопасности при начале движения задним ходом транспортировочного устройства 1, которое стояло на месте: во время остановки кто-либо мог зайти в зону погрузки, то есть внутрь U, образованного центральным участком 32 и боковыми участками 30.
Средства контактного обнаружения препятствия могут также содержать второй элемент обнаружения и третий элемент обнаружения, такие как упоры 18, расположенные на конце боковых участков 30.
Предпочтительно во время маневра стыковки груз и первый элемент обнаружения не входят друг с другом в контакт. Для этого транспортировочное устройство 1 может содержать средства, такие как ограничитель (не показан), препятствующий контакту между грузом и первым элементом обнаружения.
Как показано на фиг. 6, во время маневра стыковки зона 10 контроля может быть разделена на две отдельные подзоны 10а,10b контроля, каждая из которых проходит от конца боковых участков 30 в направлении перемещения транспортировочного устройства 1. Как показано на фиг. 6, обе подзоны 10а,10b контроля расположены на расстоянии друг от друга и не перекрывают друг друга.
Зона 10 контроля блоков 22 бесконтактного обнаружения изменяется таким образом, чтобы продолжать контролировать стороны стыкуемого груза, в данном случае анодного блока согласно примеру, показанному на фиг. 6.
Кроме того, отдельные подзоны 10а,10b контроля могут простираться, как показано на фиг. 7, от транспортировочного устройства до сторон стыкуемого груза, пока стыкуемый груз не пройдет внутрь шасси U-образной формы, чтобы предупредить появление пешего персонала или механизмов в мертвой зоне 28 во время маневра стыковки. Расстояния d4, на которые простираются подзоны 10а,10b контроля, могут, например, изменяться во время маневра стыковки, уменьшаясь по мере осуществления маневра стыковки. Такое изменение можно определять, например, в зависимости от продвижения во времени маневра стыковки или по обнаружению прохождения стыкуемого груза внутрь шасси U-образной формы.
Как показано на фиг. 2, блоки 22 обнаружения могут быть расположены на двух углах, левом переднем и правом переднем, центрального участка 32 и на двух концах боковых участков 30.
Предпочтительно транспортировочное устройство 1 может содержать средства распознавания формы, предназначенные для распознавания формы стыкуемого груза во время маневра стыковки.
Эти средства распознавания формы могут включать в себя один или несколько лазеров, выполненных с возможностью слежения за зоной загрузки транспортировочного устройства, то есть за зоной, которую пересекает транспортировочное устройство во время маневра стыковки. Согласно примеру, представленному на фиг. 1-8, зона загрузки соответствует зоне сзади транспортировочного устройства, так как маневр стыковки осуществляют на заднем ходу.
Средства распознавания формы могут совпадать со средствами дистанционного обнаружения препятствия. Иначе говоря, лазер или лазеры, образующие средства распознавания формы, предпочтительно могут совпадать с лазером или лазерами, образующими блоки 22 дистанционного обнаружения. В альтернативном варианте средства распознавания формы могут быть полностью независимыми или, в случае необходимости, входить в состав средств автоматического направления, более детально описанных ниже.
Средства дистанционного обнаружения препятствия и средства контактного обнаружения препятствия могут быть, в частности, расположены максимум на 350 мм от земли, в частности, не более 300мм от земли и предпочтительно не более 200 мм от земли.
Средства дистанционного обнаружения препятствия и средства контактного обнаружения препятствия могут быть, в частности, расположены ниже высоты, соответствующей высоте верхней поверхности колес 14 транспортировочного устройства 1.
Предпочтительно транспортировочное устройство 1 содержит средства автоматического направления для своего автономного перемещения в электролизном заводе.
Эти средства автоматического направления могут содержать, например, систему SLAM (от английского “Simultaneous Localization and Mapping”). Так, например, в направляющих средствах используют лазерные дальномеры, камеры, ультразвуковые датчики и/или емкостные датчики, и блок памяти, который может хранить оцифрованную карту электролизного завода и/или картографию маршрутов в виде базы данных.
Предпочтительно средства дистанционного обнаружения препятствия и средства контактного обнаружения препятствия являются независимыми от средств автоматического направления. Под «независимыми» следует понимать, что средства (дистанционного или контактного) обнаружения препятствия могут работать при не работающих средствах автоматического направления и не получать никакой информации от средств автоматического направления для определения зон контроля и предпринимаемых мер безопасности. Средства автоматического направления обеспечивают безопасную работу транспортировочного устройства, но эта работа зависит от сложных процессов, управляющих перемещениями транспортировочного устройства. Средства обнаружения препятствия специально предназначены для обеспечения безопасности и дополняют средства автоматического направления для обеспечения более безопасной работы транспортировочного устройства. Кроме того, независимость между средствами обнаружения препятствия и средствами автоматического направления обеспечивает исключительно безопасную работу транспортировочного устройства, в частности, за счет того, что средства обнаружения препятствия не зависят от нормальной работы средств автоматического направления.
Объектом изобретения является также электролизный завод, в частности, алюминиевый завод, содержащий по меньшей мере одно описанное выше транспортировочное устройство 1.
Разумеется, изобретение ни в коем случае не ограничивается описанным выше вариантом выполнения, который представлен только в качестве примера. В него можно вносить изменения, в частности, что касается состава различных элементов, или посредством замены техническими эквивалентами, не выходя при этом за пределы объема правовой защиты изобретения.
Многослойный катодный блок
Металлический анод выделения кислорода, работающий при высокой плотности тока, для электролизеров восстановления алюминия
Способ производства алюминия в электролизере
Способ производства тригидрата глинозема
Способ и система контроля работы установки для сушки углеродистых блоков
Способ регулирования печи для обжига анодов и печь, адаптированная для осуществления этого способа
Устройство потенциального псевдоожижения, предназначенное для транспортировки сыпучих материалов в сверхплотном слое
Снабженный канавками анод электролизера
Устройство для электрического соединения между двумя последовательными электролизерами серии электролизеров для получения алюминия
Устройство и способ очистки технологического раствора гравитационным осаждением

