Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ НАСТРОЙКИ НАВИГАЦИОННОЙ СИСТЕМЫ
Вид РИД
Изобретение
Настоящее изобретение относится к способу настройки навигационной системы согласно ограничительной части п.1 формулы изобретения, к системе настройки навигационной системы согласно ограничительной части п.6 формулы изобретения, а также к применению системы.
Все данные измерений, по существу, содержат ошибки и в большинстве случаев, к тому же, нет постоянной доступности данных измерений. Наряду с зависимостью данных измерений от имманентных свойств датчика, данные измерений, помимо этого, зачастую также зависят от условий внешней среды. Погрешности датчика или же погрешности измерений подразделяются при этом на квазистационарные - константные составляющие на протяжении многих измерений, такие как, например, так называемый offset, и статистические - случайные от измерения к измерению составляющие, такие как, например, шум. Тогда как случайные составляющие, по существу, невозможно исправить детерминированным путем, квазистационарные погрешности обычно при возможности наблюдения исправить можно. Существенные, не поддающиеся исправлению погрешности, как правило, можно по меньшей мере при распознаваемости избежать.
Из уровня техники в этой связи известны способы слияния данных с нескольких датчиков (сочетания датчиков), которые, как правило, пригодны для того, чтобы корректировать или фильтровать данные измерений различных датчиков или также сенсорных систем. В особенности в автомобильной области при этом должны соблюдаться особенные требования, т.к. множество различных датчиков регистрируют общую окружающую ситуацию или соответственно состояние автотранспортного средства посредством различных принципов измерений и описывают эту окружающую ситуацию или состояние автотранспортного средства посредством множества различных данных измерений. Для слияния данных с нескольких датчиков (сочетания датчиков), применимого в автомобильной области, необходимы, таким образом, как можно большая устойчивость к случайным помехам, а также распознавание и компенсация систематических погрешностей. Также должны корректироваться временные воздействия по значениям измерений и преодолеваться временные простои или неготовность датчиков.
В DE 10 2012 216 211 A1 описан способ выбора спутника, причем спутник является одним из спутников глобальной спутниковой системы навигации. Прежде чем такой спутник при этом будет привлечен к определению местоположения транспортного средства, полученные сигналы ГНСС (GNSS - глобальная навигационная спутниковая система) различными способами проверяются на достоверность. Для этой верификации используются соответственно различные избыточности или же известные взаимосвязи. Так, например, DE 10 2012 216 211 A1 раскрывает возможность определять на основании сигнала спутника как расстояние транспортного средства до спутника, так и относительную скорость транспортного средства относительно спутника. При этом расстояние может определяться по времени прохождения сигнала, тогда как относительная скорость может определяться по фазовым измерениям сигнала. Поскольку расстояние и относительная скорость зависят друг от друга, они могут верифицироваться относительно друг друга. Далее верификация показателей, определенных по сигналу, может проводиться в отношении к известным граничным условиям, поскольку транспортное средство, как правило, движется в рамках определенной скорости. Также описывается, что при приеме многих сигналов от различных спутников, определяются расстояния до нескольких спутников и эти расстояния одновременно верифицируются относительно друг друга посредством тригонометрических зависимостей и известного расстояния к спутникам. В завершение верификация расстояния, определенного по сигналу, или же скорости, определенной по сигналу, возможна посредством других датчиков, которые также позволяют определить местоположение или определить скорость. В случае, если сигналы спутника не могут быть верифицированы, этот спутник не привлекается к определению местоположения или соответственно определению скорости.
Из DE 10 2010 063 984 А1 известна система датчиков, включающая в себя несколько сенсорных элементов. Сенсорные элементы выполнены таким образом, что они регистрируют, по меньшей мере частично, различные первичные измеряемые величины и применяют, по меньшей мере частично, различные принципы измерений. Из первичных измеряемых величин сенсорных элементов выводятся затем, по меньшей мере частично, другие измеряемые величины. Далее, система датчиков включает в себя устройство обработки сигналов, устройство сопряжения, а также несколько функциональных устройств. При этом сенсорные элементы, а также все функциональные устройства связаны с устройством обработки сигналов. Таким образом, первичные измеряемые величины поставляют избыточные данные, которые сравнивается друг с другом в устройстве обработки сигналов или также может подкрепить друг друга. Из сравнения наблюдаемых величин, рассчитанных различным путем, можно сделать выводы по поводу надежности и точности наблюдаемых величин. Устройство обработки сигналов характеризует точность наблюдаемых величин и предоставляет наблюдаемые величины с указанием точности через устройство сопряжения различным функциональным устройствам.
DE 10 2012 219 478 A1 раскрывает систему датчиков для автономной оценки целостности своих данных. Система датчиков предпочтительно используется в автотранспортных средствах и включает в себя многие элементы датчиков, выполненные таким образом, что они регистрируют, по меньшей мере частично, различные первичные измеряемые величины или же применяют, по меньшей мере частично, различные принципы измерений. Система датчиков включает в себя также устройство обработки сигналов, анализирующее, по меньшей мере частично, совместно сигналы датчиков и одновременно оценивающее качество информации сигналов датчиков. Помимо этого, устройство обработки сигналов предоставляет информацию о непротиворечивости по меньшей мере даты физической величины, причем дата физической величины вычисляется на основе сигналов датчиков с сенсорных элементов, которые либо непосредственно регистрируют физическую величину, либо физическая величина может быть вычислена из их сигналов датчиков. Информация о непротиворечивости даты теперь вычисляется на основе имеющейся прямо или косвенно избыточной информации датчиков.
Однако, известные из уровня техники, соответствующие данной области способы и системы датчиков имеют недостатки в том плане, что они не учитывают доступность корректирующих измерений, зависящую от окружения и ситуации. Даже полный отказ определенных систем зачастую остается неучтенным. Это приводит к неоптимальным результатам объединенных и скорректированных данных.
В связи с этим, задачей настоящего изобретения является предложение улучшенного способа коррекции навигационных данных.
Эта задача решается, согласно изобретению, за счет способа настройки навигационной системы по п.1 формулы изобретения.
Настоящее изобретение относится к способу настройки навигационной системы, причем навигационная система включает в себя базовую систему и по меньшей мере одну корректирующую систему, причем и базовая система и по меньшей мере одна корректирующая система регистрируют значения измерений, причем значения измерений описывают навигационные данные, причем значения измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения значений измерений от описанных навигационных данных, причем распознавание по меньшей мере значений погрешности значений измерений базовой системы осуществляется посредством значений измерений по меньшей мере одной корректирующей системы и причем распознавание осуществляется с учетом доступности по меньшей мере одной корректирующей системы, причем учет представляет собой настройку параметров стохастической модели системы и причем стохастическая модель системы устанавливает, в соответствии с параметрами, вес значений измерений по меньшей мере одной корректирующей системы относительно значений измерений базовой системы.
Отсюда вытекает преимущество, заключающееся в том, что учитываются соответствующие условия окружающей среды и вытекающие отсюда последствия для регистрации значений измерений различных систем датчиков, т.е. базовой системы и по меньшей мере одной корректирующей системы. Вследствие того, что базовая система и по меньшей мере одна корректирующая система для регистрации значений измерений предпочтительно основываются на различных методах или также физических принципах, навигационную систему согласно данному изобретению можно всегда максимально оптимально настроить согласно имеющимся в каждом случае условиям регистрации или же условиям окружающей среды.
Учет доступности по меньшей мере одной корректирующей системы описывает при этом как условия регистрации или также условия окружающей среды в контексте граничных условий окружающей среды для регистрации значений измерений, так и ошибки внутри самой системы, нарушения системы и неисправность системы. Доступность по меньшей мере одной корректирующей системы находится под воздействием как внешних воздействий, так и внутренних воздействий.
Условиями регистрации или также условиями окружающей среды при этом являются, например, ограничения в возможности регистрации значений измерений базовой системы или же по меньшей мере одной корректирующей системы, в случае затенения системы GPS по отношению к спутникам GPS, например, при движении через тоннель или в условиях плотной городской застройки. Также ограничением в возможности регистрации значений измерений в контексте изобретения считается ситуация, когда система датчиков частично или полностью выходит из строя, например вследствие дефекта. Подобный частичный дефект может иметь место в инерциальной навигационной системе в случае, если выходит из строя одна из нескольких измерительных осей.
К тому же, как особенное преимущество способа согласно данному изобретению следует рассматривать то, что так называемая матрица системы не изменяется для настройки навигационной системы, а остается неизменной. Вместо этого настраивается лишь так называемая матрица шума системы. Это позволяет избежать риск создания неконсистентного состояния навигационной системы, в особенности, неконсистентного состояния фильтра слияния навигационной системы.
В рамках изобретения возможна настройка навигационной системы на соответственно имеющийся шум системы. Он, в значительной степени, не зависит от соответствующего уровня замеренного шума, описывающего лишь качество зарегистрированных системами датчиков значений измерений.
Предпочтительно предусмотрено при этом проводить настройку по жестко заданным наборам параметров стохастической модели, которые можно настраивать поэтапно для различных ситуаций или по возможностям доступа или же настраивать непрерывно, например, по одной или нескольким характеристикам или же по одному или нескольким полям характеристик.
Предпочтительно предусмотрено, чтобы дополнительно производилась коррекция по меньшей мере значений погрешности значений измерений базовой системы посредством значений измерений по меньшей мере одной корректирующей системы, причем чтобы коррекция производилась с учетом доступности по меньшей мере одной корректирующей системы. Отсюда вытекает преимущество, заключающееся в том, что распознавание значений погрешности приобретает конкретное значение, а именно последующую коррекцию по меньшей мере значений погрешности значений измерений базовой системы. Это улучшает и уточняет навигационные данные, определенные навигационной системой, такие, как, например, местонахождение или скорость. В особенности распознаются и корректируются значения погрешности значений измерений по меньшей мере одной корректирующей системы, причем особенно предпочтительно, чтобы значения погрешности значений измерений по меньшей мере одной корректирующей системы распознавались и корректировались посредством значений измерений базовой системы или же значений измерений другой корректирующей системы. Но также возможно и предпочтительно распознавать и корректировать значения погрешности подходящей стохастической модели, причем модель учитывает индивидуальные свойства соответствующей системы датчиков.
Кроме того предпочтительно, чтобы базовая система являлась инерциальной навигационной системой и по меньшей мере одна корректирующая система являлась глобальной спутниковой системой навигации и/или одометрической навигационной системой. Таким образом, настоящее изобретение особенно пригодно для навигации и для использования в навигационных системах, предпочтительно в автотранспортных средствах. Следовательно, таким образом, навигационная система определяет из значений измерений, в частности, местонахождение, в особенности, местонахождение автотранспортного средства. В случае глобальной спутниковой системы навигации речь может идти, к примеру, о системе навигации GPS. Одометрическая навигационная система сначала определяет скорость, например, посредством известной окружности качения шин автотранспортного средства и, таким образом, обеспечивает возможность определения местоположения с учетом угла поворота в рамках навигации по методу счисления пути. Особенно целесообразным является оснащение спутниковой системы навигации по меньшей мере двумя приемниками спутникового сигнала. Благодаря этому улучшается надежность и точность спутниковой системы навигации. Инерциальная навигационная система в качестве базовой системы имеет преимущество в том, что она обладает сравнительно самой высокой доступностью, вследствие того, что она обладает сравнительно высокой частотой вывода зарегистрированных значений измерений и, помимо этого, работает в значительной степени независимо от воздействия внешних помех.
Предпочтительно, чтобы доступность по меньшей мере одной корректирующей системы определялась посредством функции самодиагностики. Это является сравнительно простым методом определения доступности по меньшей мере одной корректирующей системы. Предпочтительно выполнить функцию самодиагностики таким образом, чтобы она могла определять как внутренние дефекты и ошибки, так и внешние воздействия помех.
Целесообразным является осуществлять распознавание и/или коррекцию посредством фильтра ошибок пространства состояний (error state space filter), в особенности, посредством фильтра ошибок пространства состояний Калмана(error state space Kalman filter). Фильтр error state space представляет собой фильтр слияния, предназначенный для объединения значений измерений, в особенности для объединения значений измерений, имеющих нормальное распределение. В то же время фильтр error state space оценивает или также определяет предпочтительно значения погрешности по меньшей мере базовой системы. Затем с помощью по меньшей мере одной корректирующей системы можно оценить или также определить значения погрешности и, при известных обстоятельствах, также неизвестные величины инерциальной навигационной системы. Особенностью фильтра error state space, следовательно, является то, что вместо сигналов датчиков или также значений измерений инкрементально оцениваются или определяются и вслед за этим корректируются лишь значения погрешности. Дело в том, что значения погрешности имеют существенно более низкую временную динамику, чем сами значения измерений, вследствие чего достигается значительное расхождение динамики фильтра error state space со свойствами базовой системы или же по меньшей мере одной корректирующей системы.
Другой особенностью фильтра Калмана error state space является то, что вследствие коррекции, оцененные или же определенные значения погрешности после каждого цикла работы фильтра Калмана error state space равны нулю, вследствие чего в следующем цикле работы не требуется этап прогнозирования для предсказания значений погрешности, необходимый в обычном случае, вследствие чего сокращается объем вычислений для фильтра Калмана error state space.
Настоящее изобретение относится кроме того к системе для настройки навигационной системы, причем навигационная система включает в себя базовую систему и по меньшей мере одну корректирующую систему,
причем базовая система и по меньшей мере одна корректирующая система выполнены для регистрации значений измерений, причем значения измерений описывают навигационные данные, причем значения измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения значений измерений от описанных навигационных данных, причем система выполнена таким образом, что она осуществляет распознавание значений погрешности значений измерений базовой системы посредством значений измерений по меньшей мере одной корректирующей системы, и причем система выполнена таким образом, что она осуществляет распознавание с учетом состояния регистрации по меньшей мере одной корректирующей системы, причем учет являет собой настройку параметров стохастической модели системы и причем стохастическая модель системы устанавливает, в соответствии с параметрами, вес значений измерений по меньшей мере одной корректирующей системы относительно значений измерений базовой системы. Система согласно данному изобретению включает в себя, таким образом, все устройства, необходимые для исполнения способа согласно данному изобретению.
Предпочтительно предусмотрено, чтобы система была выполнена для осуществления способа согласно данному изобретению.
Помимо этого, настоящее изобретение относится к применению системы согласно данному изобретению в автотранспортном средстве.
Другие предпочтительные формы осуществления следуют из зависимых пунктов формулы изобретения и нижеследующего описания примера осуществления со ссылкой на чертежи,
на которых изображено:
фиг. 1 - в качестве примера, возможная форма выполнения системы согласно изобретению, которая выполнена для определения местоположения, в автотранспортном средстве и
фиг. 2 - в качестве примера, другая возможная форма выполнения системы согласно изобретению, которая также выполнена для определения местоположения, в автотранспортном средстве.
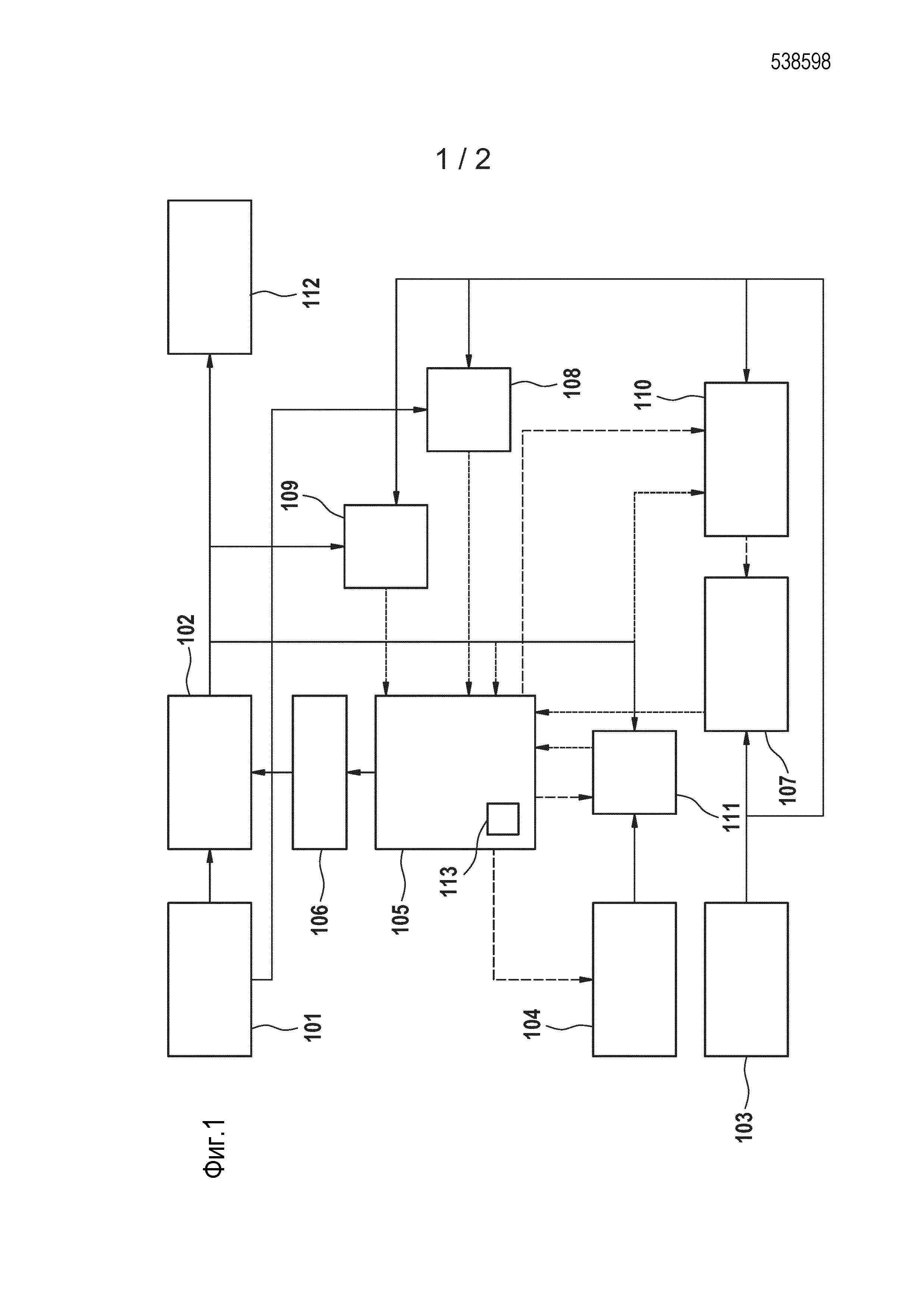
На фиг. 1 приведено схематическое изображение варианта осуществления системы согласно изобретению, предназначенной для размещения и использования в автотранспортном средстве (не изображено). При этом наглядно показаны в качестве функциональных блоков все включенные в систему элементы или же составные части или соответственно базовая система или соответственно корректирующие системы и представлено их взаимодействие между собой. Навигационная система включает в себя инерциальную навигационную систему 101, выполненную таким образом, что она может регистрировать по меньшей мере ускорение вдоль первой, второй и третьей оси, а также частоту вращения вокруг первой, второй и третьей оси. Первая ось соответствует при этом согласно примеру продольной оси автотранспортного средства, вторая ось соответствует поперечной оси автотранспортного средства и третья ось соответствует вертикальной оси автотранспортного средства. Эти три оси представляют декартову систему координат, так называемую систему координат автотранспортного средства.
Инерциальная навигационная система 101 представляет, согласно примеру, так называемую базовую систему, значения измерений которой корректируются посредством описанных далее так называемых корректирующих систем. Корректирующими системами при этом являются одометрическая навигационная система 103 и спутниковая система навигации 104.
Согласно изобретению система содержит также так называемый блок 102 алгоритма бесплатформенной системы ориентации (strap-down), в котором осуществляется так называемый алгоритм бесплатформенной системы ориентации (strap-down), с помощью которого значения измерений инерциальной сенсорной навигационной системы 101 и др. пересчитываются в данные местонахождения. Для этого дважды за время интегрируются значения измерений инерциальной сенсорной навигационной системы 101, описывающие, в соответствии со своими свойствами, ускорения. Также определяется ориентация автотранспортного средства, посредством проведенной дважды за время интеграции соответствующих значений измерений инерциальной сенсорной навигационной системы 101. Посредством однократной интеграции за время кроме того определяются ориентация и скорость автотранспортного средства. Помимо этого, блок 102 алгоритма бесплатформенной системы ориентации компенсирует силу Кориолиса, действующую на инерциальную сенсорную навигационную систему 101.
Исходные данные блока 102 алгоритма бесплатформенной системы ориентации включают, следовательно, следующие физические величины: скорость, ускорение, а также частоту вращения автотранспортного средства, согласно примеру, относительно названных трех осей системы координат автотранспортного средства и, согласно примеру, дополнительно в каждом случае по отношению к мировой системе координат, пригодной для описания ориентации или также динамических величин автотранспортного средства в мире. Согласно примеру, названной мировой системой координат является система координат GPS. Помимо этого, исходные данные блока 102 алгоритма бесплатформенной системы ориентации включают в себя местонахождение относительно системы координат автотранспортного средства и ориентация по отношению к мировой системе координат. Дополнительно исходные данные блока 102 алгоритма бесплатформенной системы ориентации демонстрируют дисперсии в качестве информации о качестве данных вышеуказанных навигационных данных. Эти дисперсии, согласно примеру, не вычисляются в блоке 102 алгоритма бесплатформенной системы ориентации, но он их использует и направляет дальше. Вышеуказанные навигационные данные, вычисленные блоком алгоритма бесплатформенной системы ориентации 102, выводятся через модуль вывода 112 и предоставляются другим системам автотранспортного средства.
Навигационная система включает в себя, помимо этого, одометрическую навигационную систему 103 в форме датчиков частоты вращения колес для каждого колеса автотранспортного средства. Согласно примеру, речь идет о четырехколесном транспортном средстве с четырьмя датчиками частоты вращения колес, регистрирующих в каждом случае частоту вращения сопряженного с ним колеса, а также ориентация его вращения. Далее, одометрическая навигационная система 103 включает в себя сенсорный элемент угла поворота рулевого колеса, который регистрирует угол поворота автотранспортного средства.
Помимо этого, навигационная система, представленная в качестве примера, обладает спутниковой системой 104 навигации, выполненной таким образом, что она определяет расстояние в каждом случае между сопряженным с ним спутником и автотранспортным средством, а также скорость в каждом случае между сопряженным с ним спутником и автотранспортным средством.
Система включает в себя, помимо этого, фильтр 105 слияния. Фильтр 105 слияния предоставляет в ходе совместной обработки данных измерений одометрической навигационной системы 103, спутниковой системы 104 навигации и инерциальной сенсорной навигационной системы 101 объединенный набор данных 106. Объединенный набор данных 106 предоставляет зарегистрированные данные измерений различных систем датчиков, причем объединенный набор данных 106, согласно примеру, дополнительно включает в себя значения погрешности и сопряженные с ними дисперсии, описывающие качество данных.
Значения измерений инерциальной сенсорной навигационной системы 101 сохраняются на заданный период во время движения автотранспортного средства в предназначенном для этих целей электронном запоминающем устройстве 113 фильтром 105 слияния. Инерциальная навигационная система 101 представляет собой при этом так называемую базовую систему, тогда как одометрическая навигационная система 103 и спутниковая система навигации 104 представляют собой так называемые корректирующие системы, значения измерений которых привлекаются для коррекции значений измерений базовой системы. Таким образом обеспечивается надежность того, что показатели, которые по меньшей мере предположительно зарегистрированы в один и тот же момент времени, всегда могут быть подвергнуты сравнению.
Предоставленный фильтром 105 слияния объединенный набор 106 данных включает в себя, согласно примеру, количественные погрешности базовой системы, определенные посредством проверенных на достоверность значений измерений корректирующих систем.
Блок 102 алгоритма бесплатформенной системы ориентации корректирует теперь значения измерений базовой системы посредством объединенного набора 106 данных.
Объединенный набор 106 данных вычисляется фильтром 105 слияния из значений измерений одометрической навигационной системы 103, спутниковой системы 104 навигации и инерциальной навигационной системы 101.
Фильтр 105 слияния, согласно примеру, выполнен как фильтр Калмана error state space, т.е. как фильтр Калмана, который, в особенности, осуществляет линеаризацию значений измерений и в котором вычисляются или соответственно оцениваются количественные значения погрешности значений измерений и который работает последовательно и при этом корректирует значения измерений, доступные в соответствующем шаге операции последовательности.
Фильтр 105 слияния выполнен таким образом, что он всегда асинхронно регистрирует самые актуальные доступные значения измерений инерциальной навигационной системы 101, одометрической навигационной системы 103 и спутниковой системы 104 навигации. Согласно примеру, значения измерений проводятся при этом через блок 107 модели транспортного средства и блок 109 модели ориентации. Блок 107модели транспортного средства выполнен таким образом, что он вычисляет из значений измерений одометрической навигационной системы 103 по меньшей мере скорость вдоль первой оси, скорость вдоль второй оси, а также частоту вращения вокруг третьей оси и предоставляет это фильтру 105 слияния.
Соответствующая примеру система включает в себя, помимо этого, блок 110 расчета параметров шин, выполненный таким образом, что он вычисляет по меньшей мере радиус, согласно примеру, динамический радиус всех колес и дополнительно вычисляет жесткость колеса при боковом уводе и жесткость скольжения всех колес и предоставляет это блоку 107 модели транспортного средства в качестве дополнительных исходных величин. Блок 110 расчета параметров шин выполнен далее таким образом, что для расчета размера шины он использует главным образом линейную модель шины.
Исходными величинами блока 110 расчета параметров шин, согласно примеру, являются частота вращения колес и описанные для угла поворота рулевого колеса значения измерений, по меньшей мере частично, начальные значения блока 102 алгоритма бесплатформенной системы ориентации, а также дисперсии, определенные фильтром 105 слияния.
Система, согласно примеру, включает в себя, помимо этого, блок 111 обнаружения помех и проверки достоверности GPS, выполненный таким образом, что он, согласно примеру, получает в качестве исходных данных и учитывает при расчетах значения измерений спутниковой системы 104 навигации, а также, по меньшей мере частично, значения измерений блока 102 алгоритма бесплатформенной системы ориентации. Блок 111обнаружения помех и проверки достоверности GPS проверяет значения измерений по стохастической модели, согласованной со спутниковой системой 104 навигации. В случае, если значения измерений в рамках допустимых отклонений с учетом шумовых помех соответствую модели, их достоверность подтверждается.
При этом блок 111 обнаружения помех и проверки достоверности GPS дополнительно связан на уровне данных с фильтром 105 слияния и передает проверенные на достоверность значения измерений фильтру 105 слияния.
Блок 111 обнаружения помех и проверки достоверности GPS выполнен таким образом, что он, согласно примеру, для выбора спутника выполняет способ, состоящий в том числе из следующих этапов:
- Измерение данных местонахождения автотранспортного средства по отношению к спутнику на основе сигналов датчика спутниковой системы 104 навигации,
- Определение контрольных данных местонахождения автотранспортного средства, являющихся избыточными по отношению к данным местонахождения, измеренным на основе сигналов датчика спутниковой системы 104 навигации,
- Выбор спутника, если сопоставление данных местонахождения и контрольных данных местонахождения удовлетворяет предопределенному условию, - причем для сопоставления данных местонахождения и контрольных данных местонахождения создается разность между данных местонахождения и контрольными данными местонахождения,
- причем предопределенное условие является максимально допустимым отклонением данных местонахождения от контрольных данных местонахождения,
- причем максимально допустимое отклонение зависит от стандартного отклонения, которое вычисляется на основе суммы из контрольной дисперсии для контрольных данных местонахождения и дисперсии измерения для данных местонахождения и
- причем максимально допустимое отклонение таким образом соответствует кратному стандартного отклонения, что вероятность того, что данные местонахождения попадают в зависящий от стандартного отклонения интервал рассеяния, не достигает предопределенного порогового значения.
Согласно примеру, система содержит, помимо этого, блок 108 распознавания неподвижного состояния, выполненный таким образом, что он может распознать неподвижное состояние автотранспортного средства и предоставляет, в случае распознанного неподвижного состояния автотранспортного средства, по меньшей мере фильтру 105 слияния информацию из модели неподвижного состояния. При этом, информация из модели неподвижного состояния описывает, что частота вращения по всем трем осям равна нулю и что скорость вдоль всех трех осей равна нулю. Блок 108 распознавания неподвижного состояния при этом выполнен, согласно примеру, таким образом, что он пользуется в качестве исходных данных значениями измерений датчиков частоты вращения колес одометрической навигационной системы 103, а также значениями измерений инерциальной навигационной системы 101.
Система сочетания датчиков использует, согласно примеру, первую группу значений измерений, относящихся к системе координат автотранспортного средства и дополнительно вторую группу значений измерений, относящихся к мировой системе координат, причем мировая система координат используется для описания ориентации и динамических величин автотранспортного средства. Посредством блока модели ориентации 109 определяется угол ориентации между системой координат автотранспортного средства и мировой системой координат. Угол ориентации между системой координат автотранспортного средства и мировой системой координат, определенный блоком 109 модели ориентации, определяется при этом на основе следующих физических величин:
- векторной скорости относительно мировой системы координат,
- векторной скорости относительно системы координат автотранспортного средства,
- угла поворота и
- соответствующих количественных погрешностей в названных величинах описанных данных измерений или соответсвенно значений.
Блок 10 модели ориентации пользуется при этом всеми исходными данными блока 102 алгоритма бесплатформенной системы ориентации. Блок 109 модели ориентации выполнен, согласно примеру, таким образом, что он вычисляет и предоставляет фильтру 105 слияния дополнительно к углу ориентации еще и информацию о качестве данных угла ориентации в форме дисперсии.
Фильтр слияния 105 использует угол ориентации и дисперсию угла ориентации в своих расчетах, результаты которых он передает через объединенный набор 106 данных блоку 102 алгоритма бесплатформенной системы ориентации.
Фильтр 105 слияния регистрирует таким образом значения измерений инерциальной навигационной системы 101, базовой системы, а также одометрической навигационной системы 103 и спутниковой системы 104 навигации, корректирующих систем.
Если меняется доступность по меньшей мере одной из двух корректирующих систем, т.е. одометрической навигационной системы 103 или спутниковой системы 104 навигации, это определяется посредством функции самодиагностики. Функция самодиагностики - это, по сути, сопоставление зарегистрированных в определенный период времени значений измерений с другими значениями измерений, зарегистрированными предпочтительно в тот же момент времени, или же, по сути, непосредственно в ближайший момент времени. Если распознается, что доступность одометрической навигационной системы 103 или спутниковой системы навигации 104 возможна лишь ограничено, то в фильтре 105 слияния загружается, соответствующий данной доступности набор параметров для матрицы шума, т.е. происходит соответствующая настройка параметров стохастической модели, описывающей шумовые свойства. Вследствие этой настройки параметров, предполагается, что значения измерений корректирующей системы, находящейся лишь в ограниченном доступе, содержат количественно большие значения погрешности и расцениваются менее значимо, чем значения измерений базовой системы и значения измерений корректирующей системы, находящейся в неограниченном доступе.
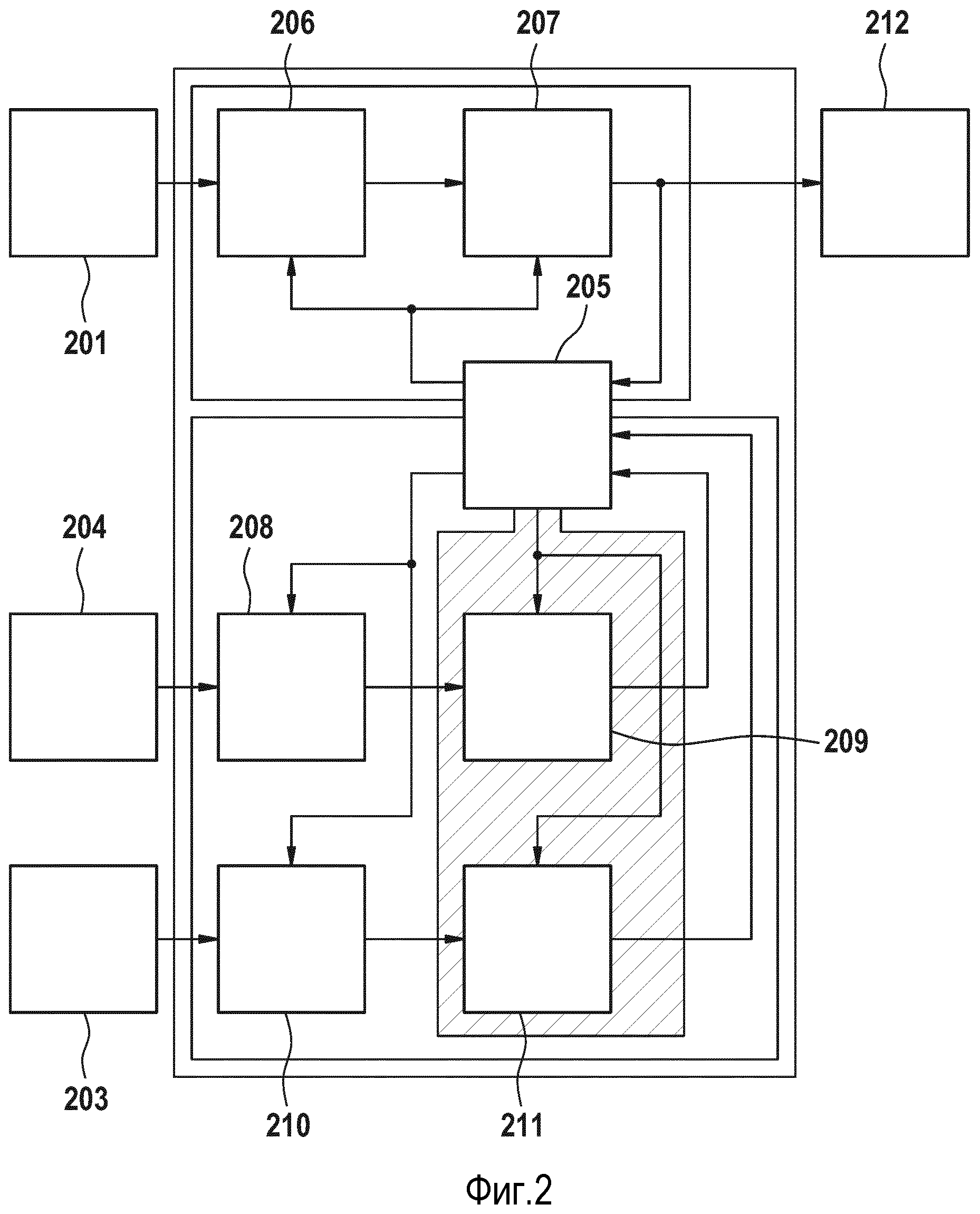
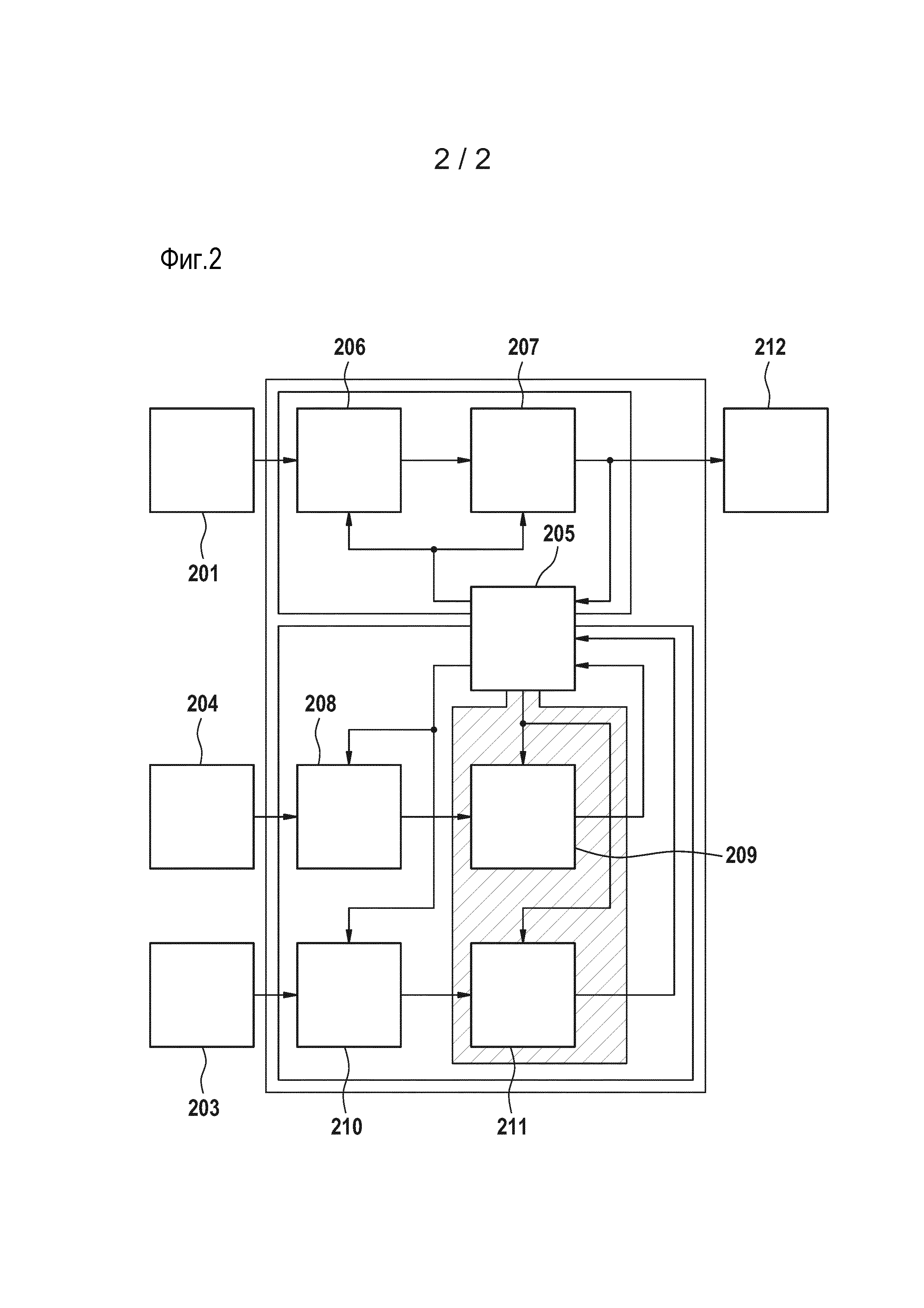
На фиг. 2 показана в качестве примера другая возможная форма выполнения системы согласно данному изобретению, которая также выполнена для настройки навигационной системы, в автотранспортном средстве (не изображено). Система включает в себя, согласно примеру, инерциальную навигационную систему 201, спутниковую систему 204 навигации и одометрическую навигационную систему 203 в качестве различных систем датчиков. Инерциальная навигационная система 201, спутниковая система 204 навигации и одометрическая навигационная система 203 выдают фильтру 205 слияния значения измерений, описывающие прямо или также косвенно навигационные данные, а именно местонахождение, скорость, ускорение, ориентация, степень рыскания или также ускорение рыскания. Выдача значений измерений осуществляется при этом через шину данных транспортного средства, согласно примеру, через так называемую CAN-шину. Согласно примеру, спутниковая 204 система навигации выдает значения своих измерений в форме необработанных данных.
В качестве центрального элемента при определении местоположения автотранспортного средства используется инерциальная навигационная система 201, так называемая MEMS-IMU (Micro-Electro-Mechanical-System-Inertial Measurement Unit - инерциальный измерительный блок с микроэлектромеханическими датчиками) в комбинации с блоком 207 алгоритма бесплатформенной системы ориентации, так как она считается безошибочной, т.е. предполагается, что показатели инерциальной навигационной системы 201 всегда соответствуют своей стохастической модели и подвержены лишь влиянию шумов и, таким образом, не зависят от внешних и случайных погрешностей или также помех. Шум, а также постоянные, не моделируемые погрешности инерциальной навигационной системы 201, как например, нелинейность, принимаются при этом через диапазон измерений как не имеющие среднего значения, постоянные и распределенные по нормальному закону (так называемый белый гауссовский шум).
Инерциальная навигационная система 201 включает в себя три, зарегистрированные по отношению друг к другу в каждом случае ортогонально, датчика частоты вращения и три, зарегистрированные по отношению друг к другу в каждом случае ортогонально, датчика ускорения.
Спутниковая система 204 навигации включает в себя GPS-приемник, который сначала по времени прохождения сигнала от спутника производит измерения расстояния до спутника GPS, сигнал которого он принимает, и, помимо этого, определяет из изменений времени прохождения сигнала от спутника, а также, дополнительно из изменений количества длины волны сигналов спутника, отрезок пути, который преодолело автотранспортное средство. Одометрическая навигационная система 203 включает в себя в каждом случае один датчик частоты вращения колес на каждом колесе автотранспортного средства, а также датчик угла поворота рулевого колеса. Датчики частоты вращения колес определяют в каждом случае скорость вращения колес, сопряженного с ними колеса, и датчик угла поворота рулевого колеса определяет угол заданного поворота.
Инерциальная навигационная система 201 выдает значения своих измерений блоку 206 предварительной обработки инерциальной сенсорной навигационной системы 201. Блок 206 предварительной обработки корректирует затем значения измерений или также описанные в них навигационные данные посредством значений поправки, которые содержатся в блоке 206 предварительной обработки фильтра 205 слияния. Скорректированные таким образом значения измерений или также описанные в них навигационные данные передаются дальше блоку алгоритма бесплатформенной системы ориентации 207.
Теперь блок 207 алгоритма бесплатформенной системы ориентации производит на основании скорректированные значений измерений блока 206 предварительной обработки определение местоположения. Это определение местоположения является при этом так называемой навигацией по счислению пути на основе инерциальной навигационной системы 201. Для этого выданные блоком 206 предварительной обработки скорректированные значения измерений или также описанные в них навигационные данные за это время интегрируются в непрерывном режиме или также суммируются. Блок 207 алгоритма бесплатформенной системы ориентации продолжает компенсировать силу Кориолиса, действующую на инерциальную сенсорную навигационную систему 201, которая может повлиять на данные измерений инерциальной навигационной системы 201. Для определения местоположения блок 207 алгоритма бесплатформенной системы ориентации за это время производит двойную интеграцию зарегистрированных инерциальной сенсорной навигационной системой 201 значений измерений, описывающих ускорения. Это позволяет продолжить запись уже известного местонахождения, а также продолжить запись уже известного ориентации автотранспортного средства. Для определения скорости или также частоты вращения автотранспортного средства блок 207 алгоритма бесплатформенной системы ориентации производит за это время однократную интеграцию значений измерений, зарегистрированных инерциальной сенсорной навигационной системой 201. Далее блок 207 алгоритма бесплатформенной системы ориентации исправляет также обозначенное местонахождение посредством соответствующих значений поправок фильтра слияния 205. Фильтр 205 слияния производит в этом примере проверку лишь косвенно через блок 207 алгоритма бесплатформенной системы ориентации. Определенные и скорректированные блоком 207 алгоритма бесплатформенной системы ориентации значения измерений или также навигационные данные, т.е. местонахождение, скорость, ускорение, ориентация, частота вращения и ускорение вращения автотранспортного средства передаются теперь модулю 212 вывода и фильтру 205 слияния.
Проведенный блоком 207 алгоритма бесплатформенной системы ориентации так называемый алгоритм бесплатформенной системы ориентации является при этом не очень комплексным для вычислений и поэтому может быть выполнен как базовая система, пригодная в реальном времени. Он представляет последовательность действий для интеграции значений измерений инерциальной навигационной системы 201 для скорости, ориентации и местонахождения и не содержит фильтрации, таким образом следует приблизительно константное время задержки и групповое время задержки.
Понятие базовая система описывает при этом такую систему датчиков, значения измерений которой исправляются посредством значений измерений других систем датчиков, так называемых корректирующих систем. Согласно примеру, как уже упоминалось, корректирующими системами являются одометрическая навигационная система 203 и спутниковая система навигации 204.
Инерциальная навигационная система 201, блок 206 предварительной обработки инерциальной сенсорной навигационной системы 201 и блок 207 алгоритма бесплатформенной системы ориентации, согласно примеру, вместе составляют так называемую базовую систему, к которой частично относится дополнительно и фильтр 205 слияния.
Модуль 212 вывода передает любым другим системам автотранспортного средства определенные и скорректированные блоком 207 алгоритма бесплатформенной системы ориентации навигационные данные.
Значения измерений, зарегистрированные спутниковой системой навигации 204, согласно примеру, передаются в форме сигналов датчика через так называемый канал для передачи данных UART сначала блоку предварительной обработки 208 спутниковой системы навигации 204. Блок предварительной 208 обработки теперь определяет на основании выданных спутниковой системой 204 навигации значений измерений, которые представляют собой необработанные данные GPS и также включают в себя описание траектории полета спутника GPS, посылающего в каждом случае сигналы GPS, местонахождение и скорость автотранспортного средства в системе координат GPS. Помимо этого, спутниковая система навигации 204 определяет относительную скорость автотранспортного средства в отношении спутников GPS, от которых принимаются сигналы GPS. Далее блок 208 предварительной обработки исправляет содержащуюся в значениях измерений погрешность времени часов приемника спутниковой системы 204 навигации, которая появляется вследствие дрейфа часов приемника, а также, посредством модели коррекции, изменения во времени прохождения сигнала и пути сигнала, вызванные атмосферными воздействиями на посланные спутниками GPS сигналы GPS. Скорректированные погрешности времени, а также атмосферных воздействий производится посредством значений поправки, полученных от фильтра 205 слияния через CAN-шину.
Далее со спутниковой системой 204 навигации сопряжен модуль 209 проверки достоверности, который проверяет на достоверность выданные блоком 208 предварительной обработки значения измерений навигационных данных, т.е. местонахождение и скорость автотранспортного средства. Проверенные на достоверность модулем 209 проверки достоверности значения измерений, предаются затем фильтру 205 слияния.
Далее система включает в себя блок 210 предварительной обработки одометрической навигационной системы 203, получающей через CAN-шину значения измерений, зарегистрированные одометрической навигационной системой 203. Зарегистрированными значениями измерений в этом случае являются значения измерений отдельных датчиков частоты вращения колес, а также значения измерений датчика угла поворота рулевого колеса. Блок 210 предварительной обработки теперь определяет из выданных одометрической навигационной системой 203 значений измерений, в соответствии с процедурой навигации по счислению пути, местонахождение и ориентация автотранспортного средства в системе координат автотранспортного средства. Далее определяются скорость, ускорение, частота вращения и ускорение вращения автотранспортного средства, также в системе координат автотранспортного средства. Помимо этого, блок 210 предварительной обработки исправляет полученные от одометрической навигационной системы 203 значения измерений посредством значений поправки, полученных от фильтра слияния 205.
Далее с одометрической навигационной системой 203 сопряжен модуль 211 проверки достоверности, который проверяет на достоверность выданные блоком предварительной обработки 210 значения измерений, т.е. местонахождение, ориентация, скорость, ускорение, частота вращения и ускорение вращения автотранспортного средства. Вследствие того, что помехи в значениях измерений одометрической навигационной системы 203 часто являются случайными помехами, обусловленными влиянием окружающей среды, которые не соответствуют белому шуму, например при сравнительно большом проскальзывание колеса, в целях подтверждения достоверности значений измерений одометрической навигационной системы 203, используются значения измерений, определенные посредством инерциальной навигационной системы 201 и посредством спутниковой системы 204 навигации. Но сначала также и здесь значения измерений сопоставляются с сопряженной с ними индивидуальной моделью датчика, учитывающей такие неточности в измерении, как воздействие шума. В случае, если значения измерений соответствуют модели в пределах заданных предельных значений или также диапазона допустимых отклонений, тут происходит первая проверка достоверности и, проверенные на достоверность таким образом значения, обрабатываются дальше. Проверенные на достоверность показатели предаются затем дальше фильтру 205 слияния. В случае, если проверка достоверности этих значений измерений не может быть проведена, соответствующие значения измерений отбрасываются и дальше не обрабатываются.
Фильтр 205 слияния, согласно примеру, выполнен как фильтр Калмана error state space. Основной задачей фильтра 205 слияния, согласно примеру, является коррекция или также вывод блоку 207 алгоритма бесплатформенной системы ориентации соответствующих значений поправок значений измерений базовой системы, т.е. инерциальной навигационной системы 201, посредством значений измерений одометрической навигационной системы 203 и спутниковой системы навигации 204, являющимися корректирующими системами. Вследствие того, что инерциальная навигационная система 201, согласно примеру, предполагается свободной от случайных погрешностей и внешних помех, значения измерений инерциальной навигационной системы 201 подвержены исключительно белому шуму.
Вследствие того, что фильтр 205 слияния является так называемым фильтром Калмана error state space, определяются исключительно количественные значения погрешности значений измерений и производятся соответствующие исправления. Это упрощает и ускоряет слияние в объединенный набор данных фильтром 205 слияния значений измерений инерциальной навигационной системы 201, одометрической навигационной системы 203 и спутниковой системы 204 навигации. Таким образом обеспечивается возможность определения местоположения и коррекции определения местоположения в реальном времени.
Система, показанная на фиг. 2 представляет так называемый виртуальный датчик, причем инерциальная навигационная система 201, одометрическая навигационная система 203 и спутниковая система навигации 204 все же не являются составными частями виртуального датчика. Виртуальный датчик - это система, которая независимо от вида присоединенных систем датчиков - здесь инерциальная навигационная система 201, одометрическая навигационная система 203 и спутниковая система 204 навигации - всегда создает одни и те же исходные данные или также данные вывода. Опираясь на исходные данные или также данные вывода, нельзя определить какие системы датчиков присоединены к системе.
В случае если доступность одной корректирующей системы изменилась, например, если спутниковой системой 204 навигации, производится настройка параметров стохастической модели, а именно так называемой матрицы шума системы, посредствам которой учитывается изменение доступности спутниковой системы 204 навигации. Причиной изменения доступности спутниковой системы 204 навигации согласно примеру, является проезд автотранспортного средства через тоннель, так что спутниковая система 204 навигации больше не может принимать сигналы сопряженных спутников навигации. Это обстоятельство, с одной стороны, распознается посредством функции самодиагностики спутниковой системы 204 навигации и сообщение об этом поступает фильтру 205 слияния, а с другой стороны, распознается посредством цифровой карты дорог, содержащейся в навигационной системе, и также сообщение об этом поступает фильтру 205 слияния. Система согласно данному изобретению загружает из цифровой памяти набор параметров для взвешивания различных значений измерений, адаптированных для проезда через тоннель.
Аварийный сигнал транспортного средства для передачи дополнительных или измененных данных
Коммуникационное устройство для автомобиля для беспроводной передачи релевантных для автомобиля данных на другой автомобиль или инфраструктуру, система помощи водителю и автомобиль, включающие указанное коммуникационное устройство и способ передачи релевантных для автомобиля данных на другой автомобиль или инфраструктуру
Исполнительное устройство и способ его регулирования
Фрикционная накладка со стальной проволочной пружинной скобой
Способ и система передачи экстренного вызова
Способ и система передачи экстренного вызова
Способ и система верификации данных измерений
Способ и система для инициализации системы сочетания датчиков

