Результат интеллектуальной деятельности: ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ
Вид РИД
Изобретение
Изобретение относится к исполнительному механизму линейного перемещения для формирования линейного усилия управления.
Известны гидравлические исполнительные механизмы линейного перемещения, применяемые в гидравлических тормозных системах транспортных средств, в частности также в системах с электрическим управлением тормозной системой. Такой исполнительный механизм линейного перемещения известен, например, из описания к патенту DE 102009019209 A1. Этот исполнительный механизм линейного перемещения состоит из вращательно-трансляционной передачи в виде шарико-винтовой передачи, имеющей шпиндель с винтовой резьбой и соответствующую ему гайку с резьбой, а также из бесщеточного электромотора с ротором и статором, которые расположены в корпусе. Шпиндель с винтовой резьбой представляет собой приводной вал электромотора и поэтому приводится в действие с помощью последнего, тогда как гайка с резьбой расположена без возможности вращения в гидравлической системе с поршнем и цилиндром, которая и образует главный тормозной цилиндр тормозной системы транспортного средства.
Однако при однократном сбое, например, блокировке шарико-винтовой передачи, исполнительный механизм линейного перемещения может отказать. Дальнейшая работа тормозной системы становится невозможной, так что водитель должен тормозить повторно. В транспортных средствах с автономными функциями для водителя, такими как системы электрического управление тормозами, водитель не имеет возможности использовать или может только ограниченно использовать повторное торможение.
Для решения такой проблемы в описании к патенту DE 112005003675 Т5 предлагается устойчивый к отказам исполнительный механизм линейного перемещения, выполненный с введением резерва в отношении важных для работы компонентов. Так этот известный исполнительный механизм линейного перемещения имеет первый моторный приводной механизм с первым мотором и соответствующей ему первой, вращающейся шариковой гайкой с шариками, шариковой опоры, второй моторный приводной механизм со вторым мотором и соответствующей ему второй, вращающейся шариковой гайкой с шариками, шариковой опоры, а также один единственный шариковый шпиндель, который входит в контакт как с первой, так и со второй шариковой гайкой. Шариковый шпиндель перемещается, когда один из моторов приводит в действие шариковую гайку или когда оба мотора приводят в действие шариковые гайки. Оба приводных механизма расположены на конце единственного шарикового шпинделя, так что приводные валы обоих моторов параллельно смещены относительно шарикового шпинделя. Каждая шариковая гайка приводится в действие с помощью передаточного механизма соответствующего мотора.
Недостаток такого известного, устойчивого к сбоям исполнительного механизма линейного перемещения усматривается в его конструктивной форму, для которой требуется значительное монтажное пространство по причине расположения обоих приводных механизмов и шарикового шпинделя с параллельными осями, и поэтому он мало пригоден для применения в транспортном машиностроении.
В патенте DE 202010016542 U1 описано решение для малогабаритного привода шпинделя металлообрабатывающей машины, который имеет первый приводной механизм с первым мотором и второй приводной механизм со вторым мотором, причем вал шпинделя может приводиться в движение выборочно - с помощью первого привода и/или второго привода, а оси мотора приводных механизмов проходят соосно валу шпинделя. Малогабаритная конструкция получается за счет того, что второй приводной механизм окружает первый приводной механизм, по меньшей мере, в отдельных областях. Это осуществляется за счет того, что первый приводной механизм выполнен как прямой привод с ротором, соединенным с валом шпинделя без возможности поворота, или как внутренний ротор. Второй приводной механизм выполнен так же, т.е. как прямой привод в форме вывода мотора с ротором, соединяемым с валом шпинделя с помощью муфты.
Задачей предложенного изобретения является создание улучшенного, по сравнению с уровнем техники, исполнительного механизма линейного перемещения для формирования линейного усилия управления, который, по меньшей мере, при однократном сбое продолжает работать в полной мере и подходит для реализации гидравлических или пневматических элементов управления, например, в рамках тормозной системы транспортного средства, т.е., в частности, требует малого монтажного пространства.
Эта задача решается с помощью исполнительного механизма линейного перемещения, имеющего признаки п. 1 формулы изобретения.
Такой исполнительный механизм линейного перемещения для формирования линейного усилия управления имеет:
- первый моторный приводной механизм с первым приводным валом, выполненным в виде пустотелого тела,
- первую вращательно-трансляционную передачу с первым шпинделем с винтовой резьбой и первой гайкой с резьбой, контактирующей со шпинделем с винтовой резьбой, который приводится в действие с помощью первого моторного приводного механизма, причем приводной вал первого моторного приводного механизма выполнен как первый шпиндель с винтовой резьбой,
- второй моторный приводной механизм с приводным валом, расположенный на одной оси с первым моторным приводным механизмом,
- вторую вращательно-трансляционную передачу со вторым шпинделем с винтовой резьбой и гайкой с резьбой, контактирующей со вторым шпинделем с винтовой резьбой, который приводится в действие при помощи второго моторного приводного механизма, причем приводной вал второго моторного приводного механизма соединен со вторым шпинделем с винтовой резьбой при помощи пустотелого вала без возможности поворота.
В таком заявленном исполнительном механизме линейного перемещения все важные для работы компоненты, такие как моторные приводные механизмы и вращательно-трансляционные передачи, выполнены с введением резерва. В моторных приводных механизмах, в случае реализации их как электромоторов, сюда включены как роторы, так и обмотки мотора. Таким образом, при выходе из строя одного из таких компонентов обеспечивается полноценная работа исполнительного механизма линейного перемещения.
Малогабаритная конструкция получается за счет того, что важные для работы главные компоненты, т.е. оба моторных приводных механизма и обе вращательно-трансляционные передачи расположены на одной оси друг за другом. Расход материала для такого заявленного исполнительного механизма линейного перемещения, по сравнению с исполнительным механизмом линейного перемещения только с одним приводным механизмом и только одной вращательно-трансляционной передачей, лишь незначительно увеличивается.
Согласно одной выгодной форме выполнения изобретения для формирования линейного усилия управления первая гайка с резьбой соединена с первым передающим усилия элементом, а вторая гайка с резьбой соединена со вторым передающим усилия элементом. За счет дублированного выполнения передающих усилия элементов для формирования линейного усилия управления сохраняется надежность работы даже при однократных сбоях.
Согласно другой предпочтительной усовершенствованной форме выполнения изобретения предусмотрен блок гидравлики или пневматики, взаимодействующий с первыми и вторыми передающими усилия элементами. В результате расположения на одной оси элементов, важных для работы заявленного исполнительного механизма линейного перемещения, такой исполнительный механизм линейного перемещения очень просто можно объединить с блоком гидравлики или пневматики в одну систему. Предпочтительно для этого предусмотрено, что первые и вторые передающие усилия элементы выполнены в виде гидравлических или пневматических поршней, которые взаимодействуют с цилиндрическими камерами, расположенными в блоке гидравлики или пневматики и имеющими подходящие размеры для гидравлических или пневматических поршней.
Объединение заявленного исполнительного механизма линейного перемещения и блока гидравлики или пневматики в одну систему происходит согласно дальнейшему усовершенствованию за счет того, что первая и вторая вращательно-трансляционные передачи расположены на противоположных сторонах блока гидравлики или пневматики. Цилиндрические камеры, расположенные в этом блоке гидравлики или пневматики, образуют вместе с передающими усилия элементами в виде поршней каждый раз гидравлическую или пневматическую систему «поршень-цилиндр».
Кроме того, согласно одной выгодной форме выполнения первый и второй приводные механизмы вместе с первой вращательно-трансляционной передачей расположены в первом корпусе, который прифланцован к блоку гидравлики или пневматики. Преимущественно вторая вращательно-трансляционная передача расположена во втором корпусе, прифланцованном к блоку гидравлики или пневматики. Таким образом, эти оба корпуса находятся на противоположных сторонах блока гидравлики или пневматики.
Каждый из обоих приводных механизмов согласно усовершенствованному варианту выполнен в виде электромотора, например, в виде бесщеточного электромотора со статором и ротором. При этом, для создания малогабаритной конструкции особенно выгодно, если, согласно усовершенствованному варианту, первая гайка с резьбой, по меньшей мере, частично окружена ротором первого приводного механизма. За счет этого как раз и уменьшается осевая длина исполнительного механизма линейного перемещения.
Кроме того, выгодно, если, согласно усовершенствованной форме выполнения, первая и вторая вращательно-трансляционные передачи выполнены как шарико-винтовые передачи.
Наконец, в последней выгодной форме выполнения изобретения надежность работы обеспечивается за счет того, что с первым и вторым приводными механизмами соединен свой блок управления, причем блоки управления имеют идентичное выполнение.
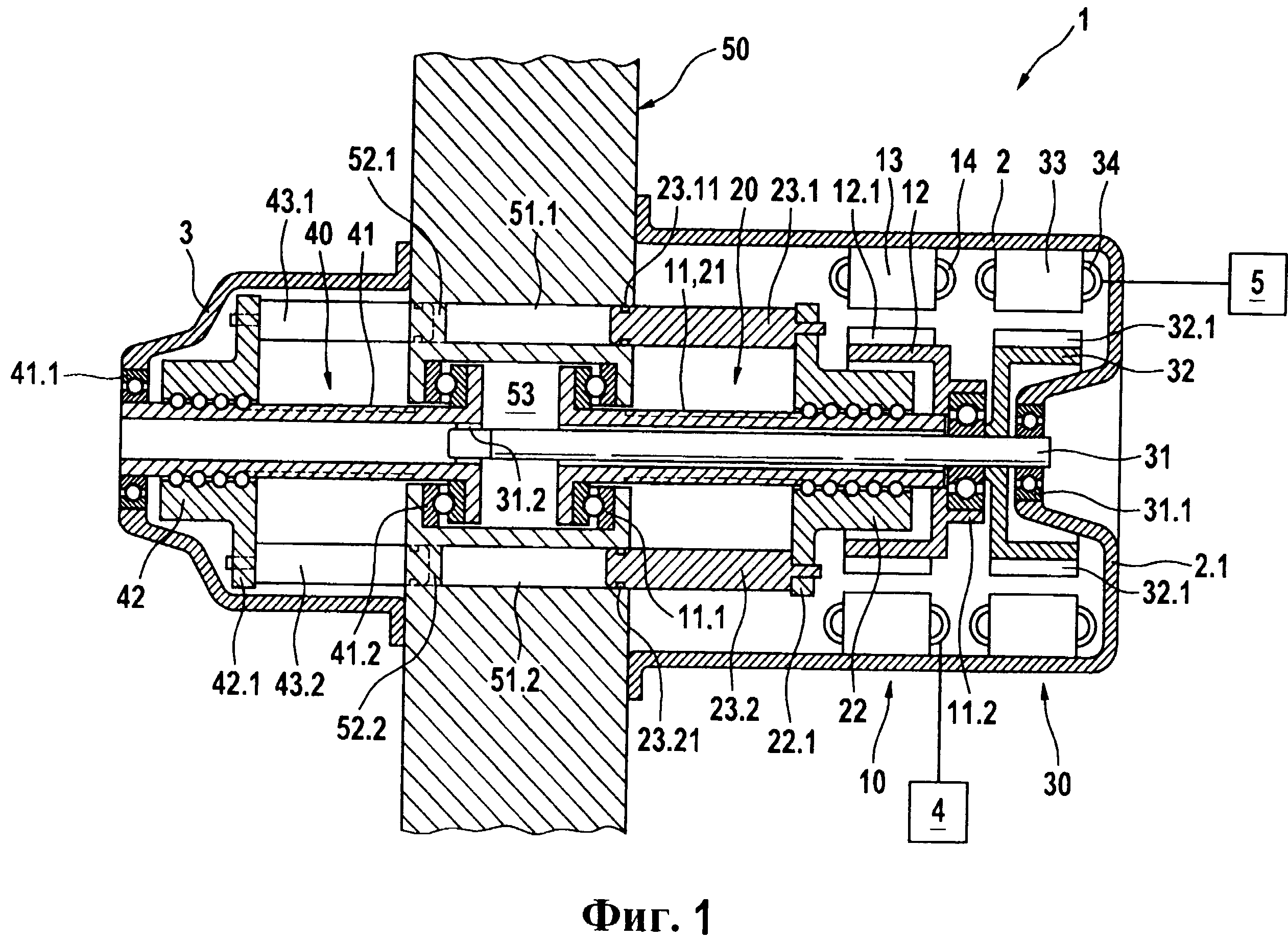
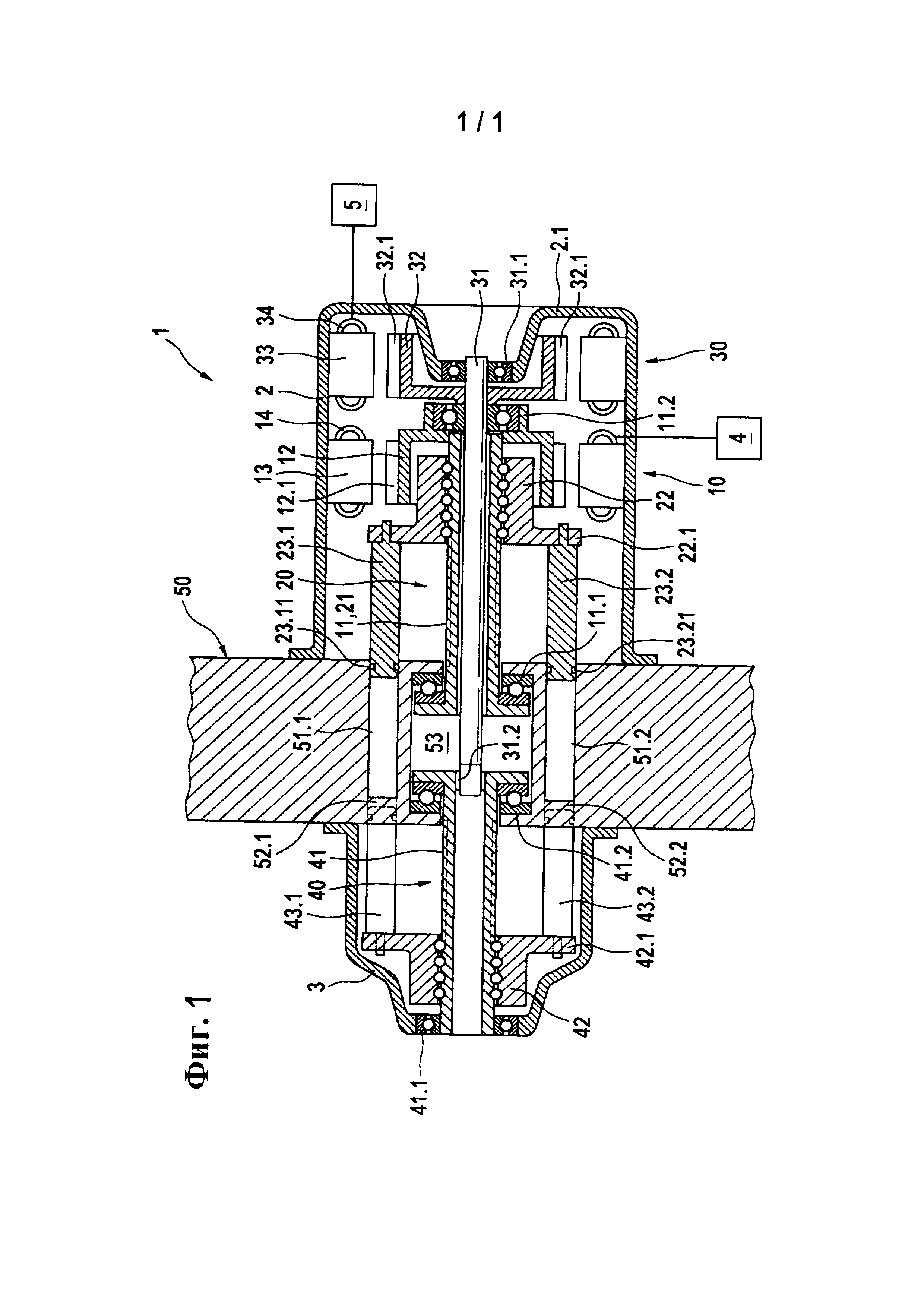
Изобретение описывается ниже более подробно на основании примера выполнения со ссылками на единственную Фиг. 1. Эта Фиг. 1 показывает исполнительный механизм линейного перемещения согласно изобретению схематично в сечении.
На Фиг. 1 схематично представлен блок гидравлики 50 гидравлической тормозной системы транспортного средства, имеющий цилиндрические камеры 51.1, 51.2, 52.1 и 52.2, которые вместе с передающими усилия элементами 23.1, 23.2, 43.1 и 43.2 исполнительного механизма линейного перемещения 1, выполненными в виде поршней, образуют гидравлическую систему «поршень-цилиндр». Таким образом, на Фиг. 1 представлен гидравлический исполнительный механизм линейного перемещения 1.
Этот исполнительный механизм линейного перемещения 1 имеет в первом корпусе 2, выполненном в виде чаши, два моторных приводных механизма 10 и 30 в виде бесщеточных электромоторов, а именно: первый электромотор 10 и второй электромотор 30. Эти оба электромотора 10 и 30 находятся на одной оси прямо по соседству друг с другом, причем второй электромотор 30 расположен на стороне дна чаши относительно первого корпуса 2 и к нему в направлении блока гидравлики 50 примыкает первый электромотор 10.
Каждый из этих двух электромоторов 10 и 30 состоит из статора 13 или 33 с принадлежащей ему обмоткой мотора 14 или 34 и ротора 12 или 32. Оба ротора 12 и 32 состоят из корпуса в виде чаши и имеют на своей наружной боковой поверхности на равномерном угловом расстоянии постоянные магниты 12.1 и 32.1. Для получения угловых положений обоих роторов 12 и 32, необходимых для подачи напряжения с правильной фазировкой обоим статорам 13 и 33, соответственно предусмотрен бесконтактно работающий датчик положения (на Фиг. 1 не представлен), сигналы которого поступают в блок управления 4 первого электромотора 10 и блок управления 5 второго электромотора 30. Наконец, источник рабочего напряжения (здесь не представлен) обеспечивает необходимым рабочим напряжением обмотки мотора 14 и 34, а также блоки управления 4 и 5.
Отверстие чашеобразного ротора 32 второго электромотора 30 указывает в направлении области основания 2.1 первого корпуса 2, имеющего в центре углубление, которое, во-первых, частично окружено ротором 32, а во-вторых, имеет подшипник 31.1 для приема приводного вала 31 второго электромотора 30. С помощью фланца ротора 32 он расположен на приводном валу 31 без возможности поворота.
Этот приводной вал 31 проходит в приводной вал 11 первого электромотора 10, выполненного в виде пустотелого тела. Этот приводной вал 11 соединен на конце с ротором 12 первого электромотора 10, причем отверстие чашеобразного ротора 12 указывает в направлении блока гидравлики 50.
С первым электромотором 10 соединена первая вращательно-трансляционная передача 20, выполненная в виде шарико-винтовой передачи и приводимая с его помощью в действие. Для этого приводной вал 11 выполнен одновременно в виде первого шпинделя с винтовой резьбой 21 этой вращательно-трансляционной передачи 20 и направляет перемещающуюся по оси первую гайку с резьбой 22 этой вращательно-трансляционной передачи 20. Конец этого первого шпинделя с винтовой резьбой 21 находится в цилиндрической полости 53 блока гидравлики 50 и направляется там с помощью подшипника 11.1. Другой опорный участок 11.2 предусмотрен на противоположном конце пустотелого вала 21, который соединен с ротором 12.
Первая гайка с резьбой 22 выполнена в виде втулки, так что она окружена, по меньшей мере, частично, чашеобразным ротором 12 первого электромотора 10, когда она находится в этой области. Кроме того, эта гайка с резьбой 22 имеет на торцевой стороне огибающий фланец 22.1, который имеет на краю первые передающие усилия элементы 23.1 и 23.2, проходящие в осевом направлении и равномерно распределенные на окружности.
Эти первые передающие усилия элементы 23.1 и 23.2 выполнены в виде гидравлических поршней и вместе с камерами 51.1 и 51.2 образуют систему «поршень-цилиндр» блока гидравлики 50. Эти гидравлические поршни 23.1 и 23.2 расположены в этих камерах 51.1 и 51.2 с возможностью перемещения, так что первая гайка с резьбой 22 на первом шпинделе с винтовой резьбой 21 может перемещаться только по оси. Когда при соответствующей подаче напряжения на первый электромотор 10 первая гайка с резьбой 22 перемещается на первом шпинделе с винтовой резьбой 21 в направлении блока гидравлики 50, в камерах 51.1 и 51.2 блока гидравлики 50 создается гидравлическое давление. Уплотнительные элементы для гидравлических поршней 23.1 и 23.2 обозначены позициями 23.11 и 23.21.
Со вторым электромотором 30 соединена вторая вращательно-трансляционная передача 40, так же выполненная в виде шарико-винтовой передачи и приводимая с его помощью в действие. Для этого приводной вал 31, проходящий через пустотелый вал 11, выполненный как первый шпиндель с винтовой резьбой 21, соединен со вторым шпинделем с винтовой резьбой 41 второй вращательно-трансляционной передачи 40, причем на этом втором шпинделе с винтовой резьбой 41 расположена вторая гайка с резьбой 42, выполненная с возможностью перемещения по оси.
Эта вторая вращательно-трансляционная передача 40 находится во втором чашеобразном корпусе 3, который на противоположной от корпуса 2 стороне прикреплен фланцами к блоку гидравлики 50.
Второй шпиндель с винтовой резьбой 41 выполнен в виде пустотелого вала, один конец которого установлен на подшипнике 41.1 на втором корпусе 3 с торца, а другой конец - на другом подшипнике 41.2 внутри цилиндрической полости 53 блока гидравлики 50 с возможностью вращения. На этом конце этот второй шпиндель с винтовой резьбой 41 соединен с помощью соединительного подшипника 31.2 с приводным валом 31 второго электромотора 30 без возможности поворота.
Вторая гайка с резьбой 42 выполнена, как и первая гайка с резьбой 22, в виде втулки и так же имеет выступающий в радиальном направлении фланец 42.1, который имеет на своей окружности вторые передающие усилия элементы 43.1 и 43.2, проходящие на окружности в осевом направлении и равномерно распределенные по окружности и взаимодействующие так же в виде гидравлических поршней с камерами 52.1 и 52.2, расположенными в блоке гидравлики 50, образуя систему «поршень-цилиндр», так что благодаря этому для второй гайки с резьбой 42 возможно только движение по оси на втором шпинделе с винтовой резьбой 41. Когда при соответствующей подаче напряжения на второй электромотор 30 вторая гайка с резьбой 42 перемещается на первом шпинделе с винтовой резьбой 41 в направлении блока гидравлики 50, в камерах 52.1 и 52.2 блока гидравлики 50 создается гидравлическое давление.
Для обеспечения независимой друг от друга работы, во-первых, первых гидравлических поршней 23.1 и 23.2 первой гайки с резьбой 22, взаимодействующих с камерами 51.1 и 51.2 и, во-вторых, вторых гидравлических поршней 43.1 и 43.2 второй гайки с резьбой 42, взаимодействующих с камерами 52.1 и 52.2, гидравлические поршни 23.1 и 23.2 первой гайки с резьбой 22 напротив гидравлических поршней 43.1 и 43.2 второй гайки с резьбой 42 смещены друг относительно друга и, таким образом, также и соответствующих камер 51.1 и 51.2 или 52.1 и 52.2 в блоке гидравлики 50.
Блок гидравлики 50 может быть также выполнен и как блок пневматики.
Перечень обозначений позиций
1 исполнительный механизм линейного перемещения
2 первый корпус исполнительного механизма линейного перемещения 1
2.1 основание первого корпуса 2
3 второй корпус исполнительного механизма линейного перемещения 1
4 блок управления первого приводного механизма 10
5 блок управления второго приводного механизма 30
10 первый моторный приводной механизм, электромотор
11 приводной вал первого приводного механизма 10
12 ротор первого приводного механизма 10 12.1 постоянный магнит
13 статор первого приводного механизма 10
14 обмотка мотора первого приводного механизма 10
20 первая вращательно-трансляционная передача
21 первый шпиндель с винтовой резьбой первой вращательно-трансляционной передачи 20
22 первая гайка с резьбой первой вращательно трансляционной передачи 20
22.1 фланец первой гайки с резьбой 22
23.1 первый передающий усилия элемент, гидравлический поршень
23.11 уплотнительный элемент гидравлического поршня 23.1
23.2 первый передающий усилия элемент, гидравлический поршень
23.21 уплотнительный элемент гидравлического поршня 23.2
30 второй моторный приводной механизм, электромотор
31 приводной вал второго приводного механизма 30
31.1 подшипник приводного вала 31
31.2 соединительный подшипник приводного вала 31
32 ротор второго приводного механизма 30 32.1 постоянный магнит
33 статор второго приводного устройства 30
34 обмотка мотора второго приводного механизма 30
40 вторая вращательно-трансляционная передача
41 второй шпиндель с винтовой резьбой второй вращательно-трансляционной передачи 40
41.1 подшипник второго шпинделя с винтовой резьбой 41
41.2 подшипник второго шпинделя с винтовой резьбой 41
42 вторая гайка с резьбой второй вращательно-трансляционной передачи 40
42.1 фланец второй гайки с резьбой 42
43.1 второй передающий усилия элемент, гидравлический поршень
43.2 второй передающий усилия элемент, гидравлический поршень
50 блок гидравлики или пневматики
51.1 цилиндрическая камера блока гидравлики или пневматики 50
51.2 цилиндрическая камера блока гидравлики или пневматики 50
52.1 цилиндрическая камера блока гидравлики или пневматики 50
52.2 цилиндрическая камера блока гидравлики или пневматики 50
53 цилиндрическая полость блока гидравлики или пневматики.
Способ и система верификации данных измерений
Способ и система для инициализации системы сочетания датчиков
Опорная пластина для фрикционной накладки дискового тормоза, фрикционная накладка дискового тормоза и дисковый тормозной механизм с неподвижной скобой

