Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ТОНКОГО СРЕДСТВА ОБРАЩЕНИЯ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА СВЯЗАННУЮ ЗАЯВКУ
[0001] Данная заявка испрашивает приоритет относительно Китайской Патентной Заявки No.201410617820,5, названной "СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ТОНКОГО СРЕДСТВА ОБРАЩЕНИЯ", поданной Департаментом Государственной Интеллектуальной Собственности Китая 4 ноября 2014г., все раскрытие которой включено здесь посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее раскрытие относится к технологии фотоэлектрического контроля и, в частности, к способу и устройству для бесконтактного контроля тонкого средства обращения.
УРОВЕНЬ ТЕХНИКИ
[0003] В повседневной жизни и при деловой активности, при использовании денежных банкнот, на них обычно утрачиваются углы и возникают разрывы, и так далее, и люди обычно соединяют поврежденную или порванную банкноту, используя клейкую ленту, или используя тонкую бумагу вместе с клеем, или чем-либо подобным, так, чтобы продолжать использование банкноты. Оказывается затруднительным контролировать банкноту, поверхность которой соединена с инородным телом, при этом эффективно используя обычный механический аппарат. Банкнота, соединенная с инородным телом может вызвать повреждение детектора аппарата защиты от подделки и аппарата сортировки и идентификации в банке. Если банкнота, соединенная с инородным телом, контролируется вручную, это приводит к затратам трудовых ресурсов и времени и к низкой эффективности контроля. Финансовая промышленность предлагает требование "качества обращаемой RMB выше, чем 70% от качества новой выпущенной банкноты" при поддержке государства, которое требует, чтобы аппарат финансового самообслуживания улучшал возможность и уровень идентификации банкнот.
[0004] Обычные способы регистрации инородного тела на поверхности денежной банкноты - это использование механического устройства измерения толщины, устройства инфракрасного контроля или устройства ультразвукового контроля. Механическим устройством измерения толщины затруднительно зарегистрировать тонкое инородное тело на поверхности банкноты вследствие низкой точности измерения. Устройство инфракрасного контроля имеет узкие области применения, и может зарегистрировать только такие инородные тела на поверхности банкноты, которые имеют отличающиеся ориентации и отличающиеся характеристики отражения, например, прозрачные клейкие ленты. Устройство ультразвукового контроля имеет большую длину измерительной волны и низкую точность вследствие использования ультразвука как носителя сигнала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В соответствии с вариантами реализации настоящего раскрытия, предоставляются способ и устройство для бесконтактного контроля тонкого средства обращения, которые решают техническую проблему малой точности и большой измерительной длины волны существующего механического устройства измерения толщины, устройства инфракрасного контроля и устройства ультразвукового контроля, используемых при регистрации того, имеется ли инородное тело на поверхности тонкого средства обращения.
[0006] В соответствии с вариантом реализации настоящего раскрытия, предоставляется способ бесконтактного контроля тонкого средства обращения, который включает в себя:
этап S1, получения моментов времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора;
этап S2, получения моментов времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора,
этап S3, вычисления первых оптических расстояний и вторых оптических расстояний, соответствующих целевому свету и опорному свету, на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора, и получение, модулем обработки сигналов, посредством использования заданного способа вычисления, числа светлых и темных полос среди интерференционных полос; и
этап S4, вычисления разности между числом светлых и темных полос среди интерференционных полос и стандартного числа светлых полос и темных полос среди интерференционных полос посредством использования заданного способа, и определения того, что имеется инородное тело на поверхности тонкого средства обращения в случае, когда разность больше, чем заданный порог.
[0007] Необязательно, перед этапом S1, способ может дополнительно включать в себя:
включение источника света, где свет, испускаемый источником света, разделяется оптическим разделителем, на первый свет, отражаемый к тонкому средству обращения, и второй свет, передаваемый на опорную плоскость, где,
первый свет отражается тонким средством обращения для образования целевого света; и
второй свет отражается назад к оптическому разделителю опорной плоскостью и отражается оптическим разделителем для образования опорного света.
[0008] Необязательно, заданный порог может быть определен исходя из ветхого тонкого средства обращения и стандартного тонкого средства обращения посредством использования способа максимальной разности.
[0009] Необязательно, этап S3 может включать в себя:
вычисление первых оптических расстояний целевого света в соответствии с первой формулой в комбинации с моментами времени, когда целевой свет достигает линейного матричного фотоэлектрического детектора, и вычисление вторых оптических расстояний опорного света в соответствии со второй формулой в комбинации с моментами времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора;
вычисление чисел изменений между светлыми и темными полосами среди интерференционных полос в соответствии с третьей формулой на основании первых оптических расстояниях, вторых оптических расстояниях и числа фоточувствительных блоков в линейном матричном фотоэлектрическом детекторе; и
вычисление среднего значения чисел изменений между светлыми и темными полосами среди интерференционных полос для чисел изменений между светлыми и темными полосами среди интерференционных полос в соответствии с четвертой формулой.
[0010] Необязательно, этап S4 может включать в себя:
получение разности между средним значением числа изменений между светлыми и темными полосами среди интерференционных полос и стандартным средним значением числа изменений между светлыми и темными полосами среди интерференционных полос; и
сравнение разности с заданным порогом; определение того, что имеется инородное тело на поверхности тонкого средства обращения в случае, если результат сравнения больше, чем заданный порог; и определение того, что нет никакого инородного тела на поверхности тонкого средства обращения в случае, если результат сравнения не больше, чем заданный порог и не меньше чем нуль.
[0011] Необязательно,
первая формула для вычисления первых оптических расстояний может быть формулой Δ1=ct1;
вторая формула для вычисления вторых оптических расстояний может быть формулой Δ2=ct2,
где t1 обозначает период времени с момента времени включения источника света до момента времени, когда целевой свет достигает линейного матричного фотоэлектрического детектора, и t2 обозначает период времени с момента времени включения источника света до момента времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора;
третьей формулой для вычисления чисел светлых и темных полос среди интерференционных полос может быть формула K(M,N)=(Δ2-Δ1)/λ0, где М обозначает общее число строк, сканируемых световым сигналом от источника света, N обозначает число фоточувствительных блоков в линейном матричном фотоэлектрическом детекторе, и λ0 обозначает длину волны источника света; и
четвертой формулой для вычисления среднего значения чисел изменений между светлыми и темными полосами среди интерференционных полос может быть формула  .
.
[0012] В соответствии с вариантом реализации настоящего раскрытия, предоставляется устройство для бесконтактного контроля тонкого средства обращения, которое включает в себя источник света, оптический разделитель, опорную плоскость, линейный матричный фотоэлектрический детектор, модуль обработки сигналов и тонкое средство обращения, где
источник света, оптический разделитель и опорная плоскость располагаются на одной и той же горизонтальной линии;
модуль обработки сигналов, линейный матричный фотоэлектрический детектор, оптический разделитель и тонкое средство обращения располагаются на одной и той же вертикальной линии;
линейный матричный фотоэлектрический детектор располагается между модулем обработки сигналов и оптическим разделителем; и
оптический разделитель наклонен.
[0013] Необязательно, источник света может быть сконфигурирован для испускания свет к оптическому разделителю, где оптический разделитель делит свет на первый свет, отражаемый к тонкому средству обращения, и второй свет, передаваемый на опорную плоскость;
тонкое средство обращения может быть выполнено с возможностью отражения первого света к модулю обработки сигналов для извлечения сигнала;
опорная плоскость может быть сконфигурирована для отражения второго света к оптическому разделителю, где оптический разделитель направляет второй свет к модулю обработки сигналов для извлечения сигнала; и
линейный матричный фотоэлектрический детектор устанавливается выше модуля обработки сигналов и сконфигурирован для регистрации моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора, соответственно, после того, как источник света включается.
[0014] Необязательно, устройство для бесконтактного контроля тонкого средства обращения может дополнительно включать в себя:
прозрачный компонент, помещенный ниже тонкого средства обращения; и
линзовую матрицу, установленную между линейным матричным фотоэлектрическим детектором и оптическим разделителем.
[0015] Оптически, устройство для бесконтактного контроля тонкого средства обращения может дополнительно включать в себя:
внешний каркас, где источник света и опорная плоскость установлены на двух внутренних стенках внешнего каркаса, соответственно, прозрачный компонент, помещенный ниже тонкого средства обращения, размещен наверху внешнего каркаса, внутреннее углубление обеспечено на внутреннем дне внешнего каркаса, и линейный матричный фотоэлектрический детектор размещен во внутреннем углублении; и
модуль обработки сигналов размещен на дне внешнего каркаса.
[0016] Из вышеупомянутых технических решений можно видеть, что варианты реализации настоящего раскрытия имеют следующие преимущества.
[0017] В соответствии с вариантами реализации настоящего раскрытия, предоставляются способ и устройство для бесконтактного контроля тонкого средства обращения, где способ включает в себя: этап S1, получения моментов времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора; этап S2, получения моментов времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора; этап S3, вычисления первых оптических расстояний и вторых оптических расстояний, соответствующих целевому свету и опорному свету, на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора, и получения, модулем обработки сигналов, посредством использования заданного способа вычисления, числа светлых и темных полос среди интерференционных полос модулем обработки сигналов; и этап S4, вычисления разности между числом светлых и темных полос среди интерференционных полос и стандартного числа светлых полос и темных полос среди интерференционных полос посредством использования заданного способа, и определения того, что имеется инородное тело на поверхности тонкого средства обращения в случае, когда разность больше, чем заданный порог. В варианте реализации, первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету, вычисляются на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора; число светлых и темных полос среди интерференционных полос получается модулем обработки сигналов посредством использования заданного способа вычисления; разность между полученным числом светлых и темных полос среди интерференционных полос и стандартным числом светлых и темных полос среди интерференционных полос вычисляется заданным способом; и определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, когда разность больше, чем заданный порог. С вышеупомянутыми техническими решениями, решаются следующие технические проблемы: когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, используя существующее механическое устройство измерения толщины, устройство инфракрасного контроля и устройство ультразвукового контроля, то оказывается затруднительным эффективно зарегистрировать тонкое инородное тело на поверхности банкноты вследствие низкой точности измерения механического устройства измерения толщины; только инородные тела на поверхности банкноты, имеющие отличающиеся ориентации и отличающиеся характеристики отражения могут быть зарегистрированы вследствие узкой области применения устройства инфракрасного контроля; и устройство ультразвукового контроля имеет большую длину измерительной волны и малую точность измерения вследствие использования ультразвука как носителя сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Для более ясной иллюстрации технических решений в вариантах реализации настоящего раскрытия или в обычной технологии, чертежи для описания вариантов реализации или обычной технологии просто приводятся ниже. Очевидно, что описываемые ниже чертежи описывают только некоторые варианты реализации настоящего раскрытия. Специалистами в данной области техники в соответствии с этими чертежами могут быть получены другие чертежи, без существенных усилий.
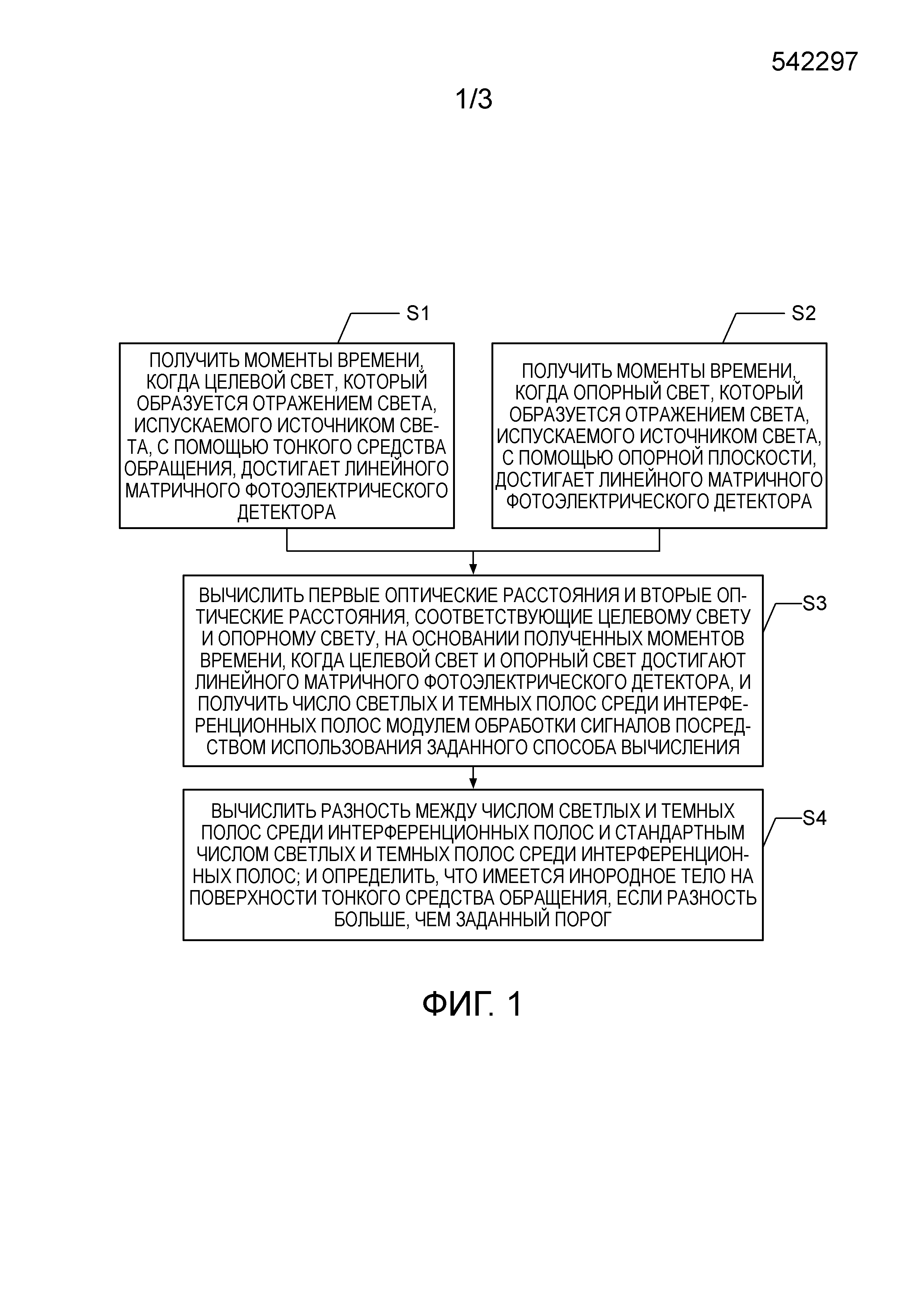
[0019] Фиг.1 изображает блок-схему последовательности операций способа бесконтактного контроля тонкого средства обращения в соответствии с вариантом реализации настоящего раскрытия;
[0020] Фиг.2 - блок-схема последовательности операций способа бесконтактного контроля тонкого средства обращения в соответствии с другим вариантом реализации настоящего раскрытия;
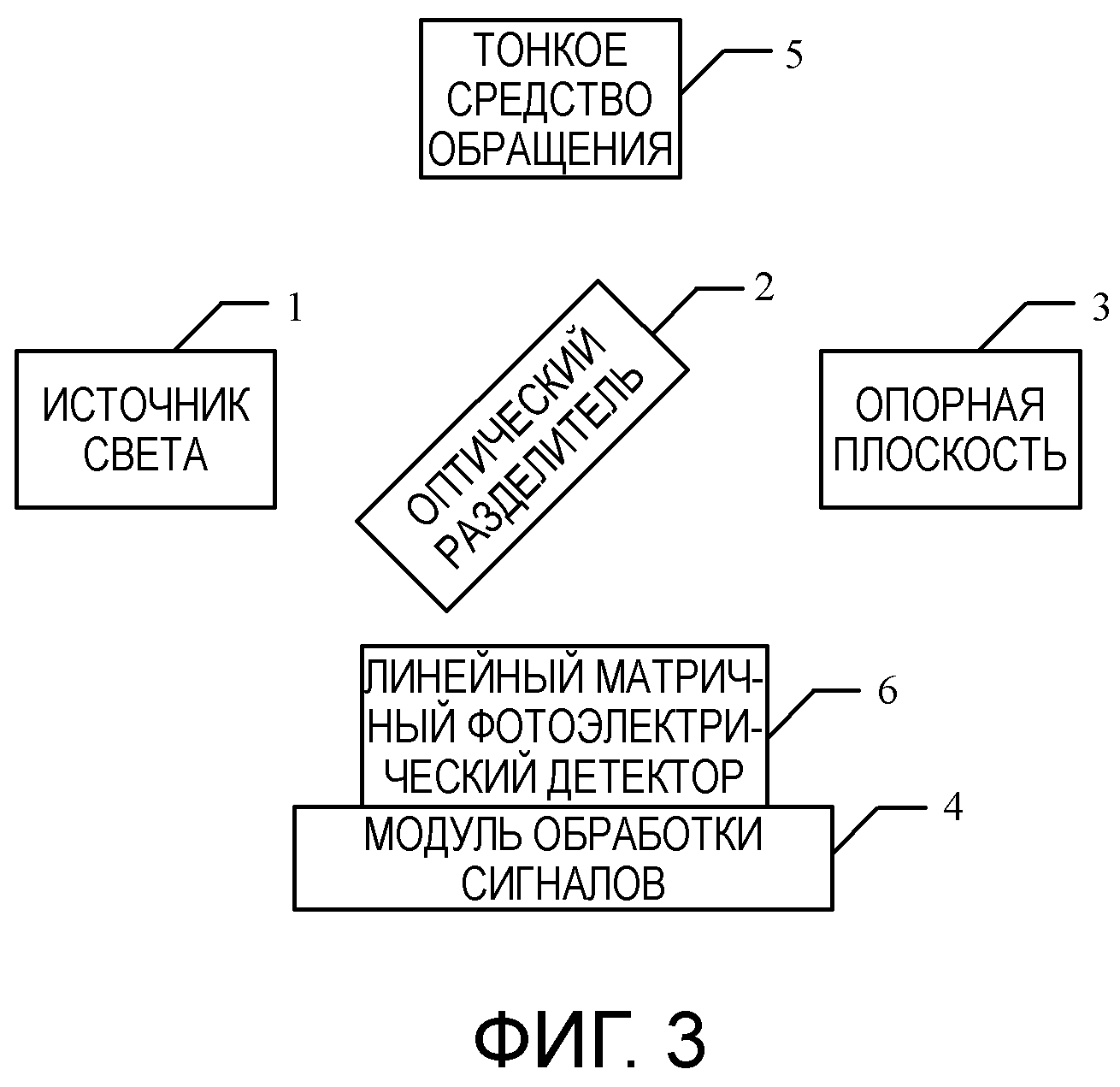
[0021] Фиг.3 - схематическая структурная диаграмма устройства для бесконтактного контроля тонкого средства обращения в соответствии с вариантом реализации настоящего раскрытия; и
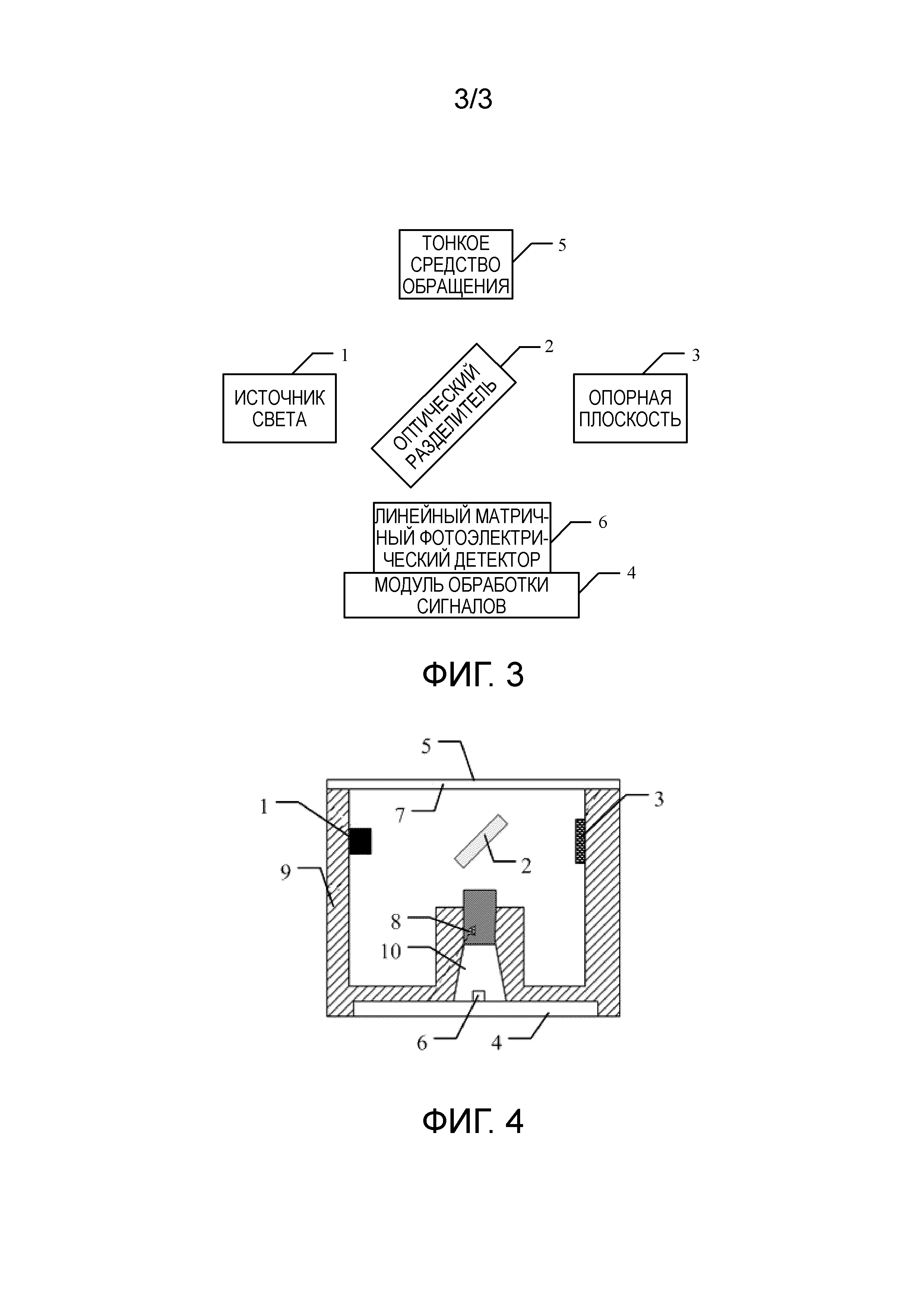
[0022] Фиг.4 - схематическая структурная диаграмма устройства для бесконтактного контроля тонкого средства обращения в соответствии с другим вариантом реализации настоящего раскрытия.
[0023] Цифровые обозначения на Фиг.3 и Фиг.4:
1 источник света; 2 оптический разделитель; 3 опорная плоскость; 4 модуль обработки сигналов; 5 тонкое средство обращения; 6 линейный матричный фотоэлектрический детектор; 7 прозрачный компонент; 8 линзовая матрица; 9 внешний каркас; 10 внутреннее углубление.
ПОДРОБНОЕ ОПИСАНИЕ
[0024] В соответствии с вариантами реализации настоящего раскрытия, предоставляются способ и устройство для бесконтактного контроля тонкого средства обращения, которые решают техническую проблему низкой точности и большой длины измерительной волны существующего механического устройства измерения толщины, устройства инфракрасного контроля и устройства ультразвукового контроля, используемых при регистрации того, имеется ли инородное тело на поверхности тонкого средства обращения.
[0025] Для того, чтобы цели, признаки и преимущества настоящего раскрытия стали более ясными и более простыми для понимания, технические решения в вариантах реализации настоящего раскрытия специально описываются ниже именно в связи с чертежами для вариантов реализации настоящего раскрытия. Очевидно, что описываемые ниже варианты реализации описывают только некоторые, а не все варианты реализации изобретения. Любые другие варианты реализации, легко получаемые специалистами в данной области техники на основании вариантов реализации настоящего раскрытия, находятся в пределах объема притязаний настоящего раскрытия.
[0026] Что касается Фиг.1, предоставляется способ бесконтактного контроля тонкого средства обращения в соответствии с вариантом реализации настоящего раскрытия. Способ включает в себя этапы S1-S4 как следующие.
[0027] На этапе S1, получаются моменты времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора.
[0028] В варианте реализации, когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, такого как денежная банкнота, вначале необходимо получить моменты времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора. Моменты времени могут быть получены линейным матричным фотоэлектрическим детектором. Источник света, описанный выше, может быть лазерным источником света и, дополнительно, может быть линейным матричным лазерным источником света.
[0029] На этапе S2, получаются моменты времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора.
[0030] В дополнение к получению целевого света, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, необходимо получить моменты времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора. Моменты времени могут быть получены линейным матричным фотоэлектрическим детектором. Следует понимать, что описанная выше опорная плоскость может быть отражающим зеркалом.
[0031] На этапе S3, первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету, вычисляются на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора, и числа светлых и темных полос среди интерференционных полос получаются модулем обработки сигналов посредством использования заданного способа вычисления.
[0032] После получения моментов времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора, и моментов времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора, необходимо вычислить первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету, на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора, и числа светлых и темных полос среди интерференционных полос получаются модулем обработки сигналов посредством использования заданного способа вычисления.
[0033] Следует отметить, что, процесс получения чисел светлых и темных полос среди интерференционных полос модулем обработки сигналов посредством использования заданного способа вычисления описывается подробно в последующих вариантах реализации, которые подробно здесь не описываются.
[0034] Следует понимать, что полученный опорный свет может проходить линзовую матрицу и затем принимается линейным матричным фотоэлектрическим детектором, линейный матричный фотоэлектрический детектор регистрирует период времени с момента времени включения источника света до момента времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора, и передает период времени на модуль обработки сигналов.
[0035] На этапе S4, вычисляется разность между числом светлых и темных полос среди интерференционных полос и стандартным числом светлых полос и темных полос среди интерференционных полос; и определяется, что имеется инородное тело на поверхности тонкого средства обращения, в случае, когда разность больше, чем заданный порог.
[0036] После того, как числа светлых и темных полос среди интерференционных полос получены модулем обработки сигналов посредством использования заданного способа вычисления, необходимо вычислить разность между числом светлых и темных полос среди интерференционных полос и стандартным числом светлых полос и темных полос среди интерференционных полос посредством использования заданного способа; и определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, когда разность больше, чем заданный порог. Следует понимать, что описанный выше заданный порог определяется на основании ветхого тонкого средства обращения и стандартного тонкого средства обращения посредством использования способа максимальной разности. Следует отметить, что число светлых и темных полос среди интерференционных полос - это информация об интерференционных полосах, полученная для стандартного тонкого средства обращения на этапах S1-S3, прежде, чем выполняется способ бесконтактного контроля тонкого средства обращения в варианте реализации.
[0037] Следует понимать, что процесс вычисления разности посредством использования описанного выше заданного способа, описан в последующих вариантах реализации, который не описывается подробно здесь.
[0038] В варианте реализации, первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету, вычисляются на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора; числа светлых и темных полос среди интерференционных полос получаются модулем обработки сигналов посредством использования заданного способа вычисления; вычисляется разность между числом светлых и темных полос среди интерференционных полос и стандартным числом светлых полос и темных полос среди интерференционных полос; и определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, когда разность больше, чем заданный порог. С техническими решениями, описанными выше, решаются следующие технические проблемы: когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, используя существующее механическое устройство измерения толщины, устройство инфракрасного контроля и устройство ультразвукового контроля, то трудно эффективно зарегистрировать тонкое инородное тело на поверхности денежной банкноты вследствие низкой точности измерения механического устройства измерения толщины; только инородные тела на поверхности банкноты, имеющие отличающиеся ориентации и отличающиеся характеристики отражения могут быть зарегистрированы вследствие узкой области применения устройства инфракрасного контроля; и устройство ультразвукового контроля имеет большую длину измерительной волны и низкую точность измерения вследствие использования ультразвука в качестве носителя сигнала.
[0039] Способ бесконтактного контроля тонкого средства обращения описан подробно выше, и процесс получения информации об интерференционных полосах для электрического сигнала, преобразованного фотоэлектрическим счетчиком посредством использования заданного способа вычисления, и сравнения посредством использования заданного способа, подробно описывается ниже. Что касается Фиг.2, способ бесконтактного контроля тонкого средства обращения предоставляется в соответствии с другим вариантом реализации настоящего раскрытия. Способ включает в себя этапы S201-S208 следующим образом.
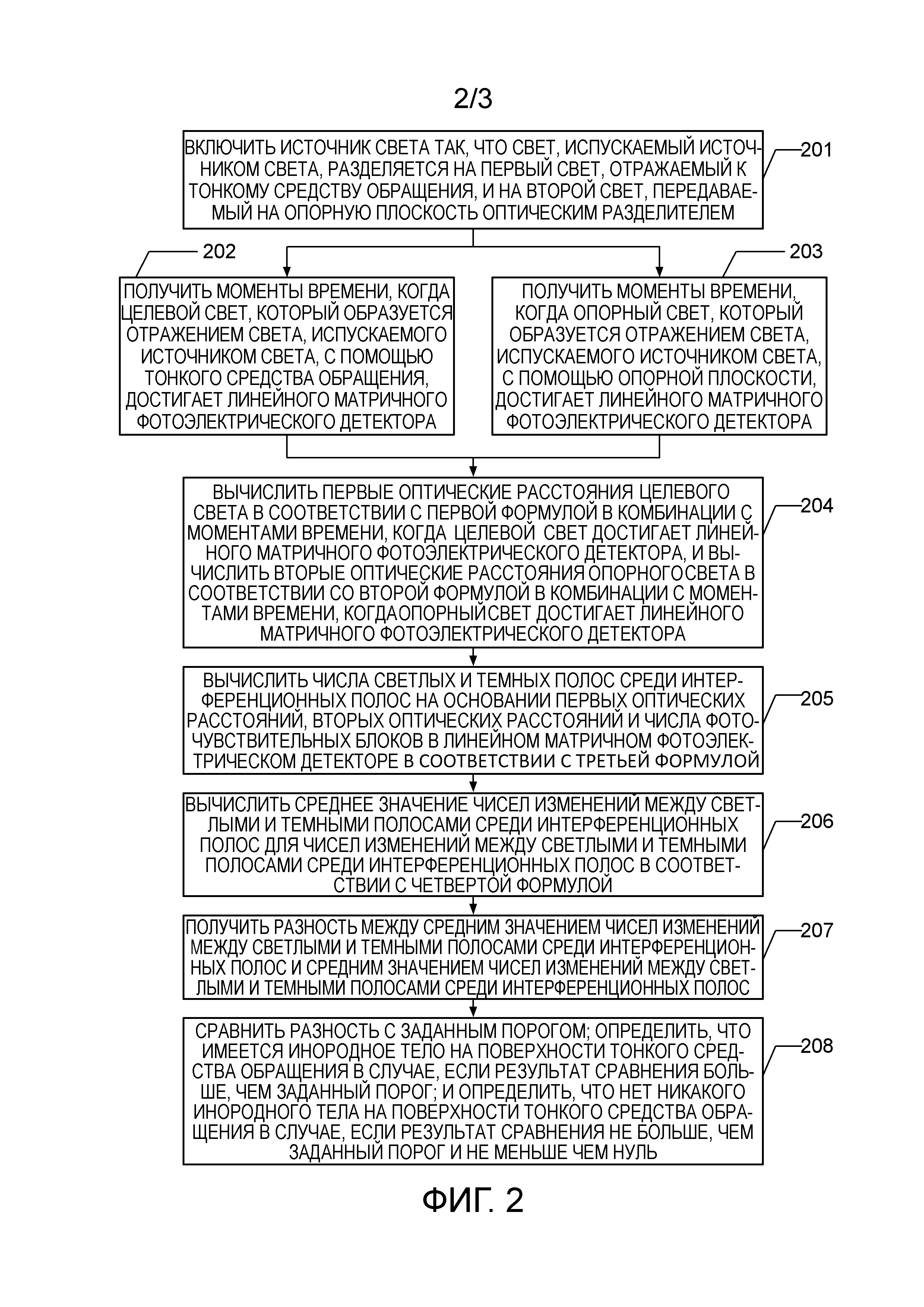
[0040] На этапе S201, источник света включается так, что свет, испускаемый источником света, разделяется на первый свет, отражаемый к тонкому средству обращения, и на второй свет, передаваемый на опорную плоскость оптическим разделителем.
[0041] В варианте реализации, когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, такого как денежная банкнота, вначале необходимо включить источник света так, что свет, испускаемый источником света, разделяется на первый свет, отражаемый к тонкому средству обращения, и второй свет, передаваемый на опорную плоскость оптическим разделителем. Источник света, описанный выше, может быть лазерным источником света, и может быть дополнительным линейным матричным лазерным источником света.
[0042] Следует понимать, что первый свет отражается тонким средством обращения для образования целевого света, и второй свет отражается назад к оптическому разделителю опорной плоскостью и отражается оптическим разделителем для образования опорного света.
[0043] Следует отметить, что последующие регистрации на тонком средстве обращения могут быть выполнены во время перемещения механизмом перемещения банкноты, который здесь подробно не описывается.
[0044] На этапе S202, получаются моменты времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора.
[0045] В варианте реализации, когда свет, испускаемый источником света разделяется на первый свет, отражаемый к тонкому средству обращения и на второй свет, передаваемый на опорную плоскость оптическим разделителем, вначале необходимо получить моменты времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора. Моменты времени могут быть получены линейным матричным фотоэлектрическим детектором. Источник света, описанный выше, может быть лазерным источником света, и может дополнительно быть линейным матричным лазерным источником света.
[0046] Следует отметить, что получаемый целевой свет может проходить линзовую матрицу и затем приниматься линейным матричным фотоэлектрическим детектором, линейный матричный фотоэлектрический детектор регистрирует период времени с момента времени включения источника света до момента времени, когда целевой свет достигает линейного матричного фотоэлектрического детектора, и передает период времени на модуль обработки сигналов.
[0047] На этапе S203, получаются моменты времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора.
[0048] В дополнение к получению целевого света, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, необходимо получить моменты времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора. Моменты времени могут быть получены линейным матричным фотоэлектрическим детектором. Следует понимать, что описанная выше опорная плоскость может быть отражающим зеркалом.
[0049] Следует отметить, что полученный опорный свет может проходить линзовую матрицу и приниматься линейным матричным фотоэлектрическим детектором, линейный матричный фотоэлектрический детектор регистрирует период времени с момента времени включения источника света до момента времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора, и передает период времени на модуль обработки сигналов.
[0050] На этапе S204, первые оптические расстояния целевого света вычисляются в соответствии с первой формулой в комбинации с моментами времени, когда целевой свет достигает линейного матричного фотоэлектрического детектора, и вторые оптические расстояния опорного света вычисляются в соответствии со второй формулой в комбинации с моментами времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора.
[0051] После получения моментов времени, когда целевой свет, который образуется отражением света, испускаемого источником света, с помощью тонкого средства обращения, достигает линейного матричного фотоэлектрического детектора, и моментов времени, когда опорный свет, который образуется отражением света, испускаемого источником света, с помощью опорной плоскости, достигает линейного матричного фотоэлектрического детектора, необходимо вычислить первые оптические расстояния целевого света в соответствии с первой формулой в комбинации с моментами времени, когда целевой свет достигает линейного матричного фотоэлектрического детектора, и вычислить вторые оптические расстояния опорного света в соответствии со второй формулой в комбинации с моментами времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора.
[0052] Следует отметить, что, первая формула, описанная выше, для вычисления первых оптических расстояний имеет вид Δ1=ct1, и вторая формула для вычисления вторых оптических расстояний имеет вид Δ2=ct2.
[0053] Символ t1 обозначает период времени с момента времени включения источника света до момента времени, когда целевой свет достигает линейного матричного фотоэлектрического детектора, и t2 обозначает период времени с момента времени включения источника света до момента времени, когда опорный свет достигает линейного матричного фотоэлектрического детектора. Следует понимать, что приведенный выше символ c - это скорость света.
[0054] На этапе S205, числа светлых и темных полос среди интерференционных полос вычисляются на основании первых оптических расстояний, вторых оптических расстояний и числа фоточувствительных блоков в линейном матричном фотоэлектрическом детекторе в соответствии с третьей формулой.
[0055] После того, как первые оптические расстояния целевого света вычислены в соответствии с первой формулой, и вторые оптические расстояния опорного света вычислены в соответствии со второй формулой, необходимо вычислить числа светлых и темных полос среди интерференционных полос на основании первых оптических расстояний, вторых оптических расстояний и числа фоточувствительных блоков в линейном матричном фотоэлектрическом детекторе в соответствии с третьей формулой.
[0056] Следует понимать, что, третья формула, описанная выше может быть формулой K(M,N)=(Δ2-Δ1)/λ0, где K(М, N) обозначает число изменений между светлыми и темными полосами среди интерференционных полос, М обозначает общее число строк, сканируемых световым сигналом от источника света, N обозначает число фоточувствительных блоков в линейном матричном фотоэлектрическом детекторе, и λ0 обозначает длину волны источника света.
[0057] Следует отметить, что, число изменений интерференционных полос обозначает числа изменений между светлыми и темными полосами среди интерференционных полос, и интерференционные полосы - это явление лазерной интерференции, обусловленное изменением разности оптического пути. Лазерная интерференция относится к явлению, возникающему, когда две или более оптических волн, имеющих ту же самую частоту, то же самое направление колебаний и ту же самую постоянную разность фаз перекрываются в некоторой области пространства. Когда возникает лазерная интерференция, интенсивность светового поля всегда усиливается в некоторых областях и всегда ослабляется в других областях, формируя устойчивое распределение интенсивности, то есть, формируя интерференционные полосы, которые изменяются между светлотой и темнотой в соответствии с определенным законом. Интерференционные полосы - это рисунок, сформированный точками, имеющими ту же самую разность оптических расстояний для двух путей света, и разность оптических расстояний относится к разности оптических расстояний для двух путей света устройства освещения. Изменение светлых полос и темных полос, образующихся вследствие лазерной интерференции, главным образом зависит от разности оптического расстояния двух лучей, а не от разности геометрических путей двух лучей. Оптическое расстояние относится к соответствующему пути, который свет проходит в вакууме за некоторый период времени, и соответствующий путь вычисляется в соответствии с путем, который свет проходит в среде за тот же самый период времени. Оптическое расстояние в материале с определенным показателем преломления равно произведению показателя преломления и расстояния распространения в материале. Когда разность оптических расстояний интерференционного устройства изменяется со временем, интенсивность светового поля, принимаемая в фиксированной точке, изменяется поочередно между сильной и слабой. Число изменений интерференционных полос хорошо известно специалистам в данной области техники.
[0058] На этапе S206, среднее значение чисел изменений между светлыми и темными полосами среди интерференционных полос для чисел изменений между светлыми и темными полосами среди интерференционных полос вычисляется в соответствии с четвертой формулой.
[0059] После того, как числа светлых и темных полос среди интерференционных полос вычислены на основании первых оптических расстояний, вторых оптических расстояний и чисел фоточувствительных блоков в линейном матричном фотоэлектрическом детекторе в соответствии с третьей формулой, необходимо вычислить среднее значение чисел изменений между светлыми и темными полосами среди интерференционных полос для чисел изменений между светлыми и темными полосами среди интерференционных полос в соответствии с четвертой формулой.
[0060] Следует отметить, что, четвертая формула для вычисления среднего значения чисел изменений между светлыми и темными полосами среди интерференционных полос может быть формулой
.
[0061] На этапе S207, получается разность между средним значением чисел изменений между светлыми и темными полосами среди интерференционных полос и стандартным средним значением чисел изменений между светлыми и темными полосами среди интерференционных полос.
[0062] После того, как среднее значение числа изменений между светлыми и темными полосами среди интерференционных полос для чисел изменений между светлыми и темными полосами среди интерференционных полос вычислено в соответствии с четвертой формулой, необходимо получить разность между средним значением чисел изменений между светлыми и темными полосами среди интерференционных полос и средним значением чисел изменений между светлыми и темными полосами среди интерференционных полос.
[0063] Следует понимать, что стандартное число светлых полос и темных полос среди интерференционных полос может быть получено, выполняя этапы 201-206 на стандартном тонком средстве обращения, таком как стандартная неповрежденная банкнота, и может быть предварительно сохранено в модуле обработки сигналов, описанном выше.
[0064] На этапе S208, разность сравнивается с заданным порогом; определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, если результат сравнения больше, чем заданный порог; и определяется, что нет никакого инородного тела на поверхности тонкого средства обращения в случае, если результат сравнения не больше, чем заданный порог и не меньше чем нуль.
[0065] После получения разности между средним значением чисел изменений между светлыми и темными полосами среди интерференционных полос и средним значением чисел изменений между светлыми и темными полосами среди интерференционных полос, необходимо сравнить разность с заданным порогом; определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, если результат сравнения больше, чем заданный порог; и определяется, что нет никакого инородного тела на поверхности тонкого средства обращения в случае, если результат сравнения не больше, чем заданный порог и не меньше чем нуль.
[0066] Следует отметить, что заданный порог, описанный выше, может быть значением заключения, полученным специалистами в данной области техники из известного условия и полученный опытом и экспериментами, или может быть эмпирическим значением для специалистов в данной области техники, или значением заключения, полученном экспериментами. Кроме того, заданный порог определяется на основании ветхого тонкого средства обращения и стандартного тонкого средства обращения посредством использования способа максимальной разности. Например, в случае, когда тонкое средство обращения - это денежная банкнота, для множественных ветхих банкнот, среднее значение чисел изменений между светлыми и темными полосами среди интерференционных полос ветхих банкнот определяется в соответствии с этапами 202-206, описанными выше; разность между средним значением и числом изменений между светлыми и темными полосами среди интерференционных полос в стандартной информации об интерференционных полосах, упомянутой на этапе 207, вычисляется посредством использования способа максимальной разности, где разность - это заданный порог, описанный выше.
[0067] В варианте реализации, весь процесс вычисления может быть выполнен модулем обработки сигналов, и процесс известен специалистам в данной области техники и не описывается здесь подробно.
[0068] В варианте реализации, первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету, вычисляются на основании полученных моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора; число светлых и темных полос среди интерференционных полос получается модулем обработки сигналов посредством использования заданного способа вычисления; число светлых и темных полос среди интерференционных полос сравнивается со стандартным числом светлых и темных полос среди интерференционных полос; и определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, если результат сравнения больше, чем заданный порог. С вышеупомянутыми техническими решениями, решаются следующие технические проблемы: когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, используя существующее механическое устройство измерения толщины, устройство инфракрасного контроля и устройство ультразвукового контроля, то трудно эффективно зарегистрировать тонкое инородное тело на поверхности банкноты вследствие низкой точности измерения механического устройства измерения толщины; только инородные тела на поверхности банкноты, имеющие отличающиеся ориентации и отличающиеся характеристики отражения могут быть зарегистрированы вследствие узкой области применения устройства инфракрасного контроля; и устройство ультразвукового контроля имеет большую длину измерительной волны и низкую точность измерения вследствие использования ультразвука как носителя сигнала, тем самым, дополнительно улучшая чувствительность измерения и точность измерения.
[0069] Что касается Фиг.3, устройство для бесконтактного контроля тонкого средства обращения предоставляется в соответствии с вариантом реализации настоящего раскрытия. Устройство включает в себя:
источник 1 света, оптический разделитель 2, опорную плоскость 3, линейный матричный фотоэлектрический детектор 6, модуль 4 обработки сигналов и тонкое средство 5 обращения. Следует отметить, что источник 1 света - это линейный матричный источник лазерного света, и опорная плоскость 3 - это плоское отражающее зеркало.
[0070] Источник 1 света, оптический разделитель 2 и опорная плоскость 3 расположены на одной и той же горизонтальной линии.
[0071] Модуль 4 обработки сигналов, линейный матричный фотоэлектрический детектор 6, оптический разделитель 2 и тонкое средство 5 обращения расположены на одной и той же вертикальной линии.
[0072] Линейный матричный фотоэлектрический детектор 6 расположен между модулем 4 обработки сигналов и оптическим разделителем 2.
[0073] Оптический разделитель 2 наклонен.
[0074] Следует отметить, что на Фиг.3 показана только схематическая структурная диаграмма положений источника 1 света, оптического разделителя 2, опорной плоскости 3, модуля 4 обработки сигналов и тонкого средства 5 обращения в пространстве в соответствии с вариантом реализации, источник 1 света, оптический разделитель 2, опорная плоскость 3, линейный матричный фотоэлектрический детектор 6, модуль 4 обработки сигналов и тонкое средство 5 обращения могут быть целиком размещены в устройстве для бесконтактного контроля тонкого средства обращения, или источник 1 света, оптический разделитель 2, опорная плоскость 3, модуль 4 обработки сигналов и тонкое средство 5 обращения могут быть независимыми конструкциями, поддерживаемыми различными частями поддержки, которые не ограничиваются здесь.
[0075] В варианте реализации, источник 1 света, оптический разделитель 2 и опорная плоскость 3 размещены на одной и той же горизонтальной линии, и модуль 4 обработки сигналов, линейный матричный фотоэлектрический детектор 6, оптический разделитель 2 и тонкое средство 5 обращения размещены на одной и той же вертикальной линии, так, что получаются моменты времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора; первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету, вычисляются; число светлых и темных полос среди интерференционных полос получаются модулем 4 обработки сигналов посредством использования заданного способа вычисления; число светлых и темных полос среди интерференционных полос сравнивается со стандартным числом светлых полос и темных полос среди интерференционных полос посредством использования заданного способа; и определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, если результат сравнения больше, чем заданный порог. С вышеупомянутыми техническими решениями, решаются следующие технические проблемы: когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, используя существующее механическое устройство измерения толщины, устройство инфракрасного контроля и устройство ультразвукового контроля, то трудно эффективно зарегистрировать тонкое инородное тело на поверхности банкноты вследствие низкой точности измерения механического устройства измерения толщины; только инородные тела на поверхности банкноты, имеющие отличающиеся ориентации и отличающиеся характеристики отражения могут быть зарегистрированы вследствие узкой области применения устройства инфракрасного контроля; и устройство ультразвукового контроля имеет большую длину измерительной волны и низкую точность измерения вследствие использования ультразвука как несущего сигнал.
[0076] Конструкция устройства для бесконтактного контроля тонкого средства обращения описана подробно выше, и дополнительные конструкции описаны подробно ниже. Что касается Фиг.4, устройство для бесконтактного контроля тонкого средства обращения предоставляется в соответствии с другим вариантом реализации настоящего раскрытия. Устройство включает в себя:
источник 1 света, оптический разделитель 2, опорную плоскость 3, модуль 4 обработки сигналов и тонкое средство 5 обращения. Следует отметить, что источник 1 света - это линейный матричный источник лазерного света, и опорная плоскость 3 - это плоское отражающее зеркало.
[0077] Источник 1 света, оптический разделитель 2 и опорная плоскость 3 расположены на одной и той же горизонтальной линии.
[0078] Модуль 4 обработки сигналов, линейный матричный фотоэлектрический детектор 6, оптический разделитель 2 и тонкое средство 5 обращения расположены на одной и той же вертикальной линии.
[0079] Линейный матричный фотоэлектрический детектор 6 расположен между модулем 4 обработки сигналов и оптическим разделителем 2.
[0080] Оптический разделитель 2 наклонен.
[0081] В соответствии с вариантом реализации, устройство может дополнительно включать в себя:
внешний каркас 9, где источник 1 света и опорная плоскость 3 размещаются на двух внутренних стенках внешнего каркаса 9, прозрачный компонент 7, помещенный ниже тонкого средства 5 обращения, размещается наверху внешнего каркаса 9, внутреннее углубление 10 обеспечено на внутреннем дне внешнего каркаса 9, линейный матричный фотоэлектрический детектор 6 размещается в пределах внутреннего углубления 10, и модуль 4 обработки сигналов размещается на дне внешнего каркаса 9;
прозрачный компонент 7, например, стекло, который помещен ниже тонкого средства 5 обращения и может быть соединен с верхним участком внешнего каркаса 6 через компонент фиксации, например, держатель;
линзовую матрицу 8, установленную между линейным матричным фотоэлектрическим детектором 6 и оптическим разделителем 2, где,
линейный матричный фотоэлектрический детектор 6 установлен выше модуля 4 обработки сигналов и сконфигурирован для регистрации моментов времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора 6, соответственно, после того, как источник света включается.
[0082] Источник 1 света сконфигурирован для испускания света на оптический разделитель 2, и оптический разделитель 2 делит свет на первый свет, отражаемый к тонкому средству 5 обращения, и второй свет, передаваемый на опорную плоскость 3.
[0083] Тонкое средство 5 обращения выполнено с возможностью отражения первого света к модулю 4 обработки сигналов для извлечения сигнала.
[0084] Опорная плоскость 3 сконфигурирована для отражения второго света назад к оптическому разделителю 2, и оптический разделитель 2 направляет второй свет на модуль 4 обработки сигналов для извлечения сигнала.
[0085] То, как компоненты устройства для бесконтактного контроля тонкого средства обращения в варианте реализации связаны, подробно описывается ниже.
[0086] Источник 1 света размещен на левой внутренней стороне внешнего каркаса 9 и сконфигурирован для испускания узкополосного лазерного света. Оптический разделитель 2 расположен справа ниже прозрачного компонента 7 и зафиксирован и соединен с внешним каркасом 9 через держатель, и оптический разделитель 2 сконфигурирован для разделения и объединения лазерного света. Опорная плоскость 3, то есть, плоское отражающее зеркало, расположено на правой стороне оптического разделителя 2 и размещено на левой внутренней стороне внешнего каркаса 9, и опорная плоскость 3 сконфигурирована для отражения вертикально падающего света и возвращения света на исходный путь. Линзовая матрица 8 расположена справа ниже оптического разделителя 2 и соединена с внешним каркасом 9, и сконфигурирована для сведения лазерного света к линейном матричном фотоэлектрическом детекторе 6. Линейный матричный фотоэлектрический детектор 6 расположен ниже линзовой матрицы 8 и размещен в середине внутреннего углубления 10, и сконфигурирован для измерения числа изменений между светлыми и темными полосами среди интерференционных полос. Модуль 4 обработки сигналов расположен ниже линейного матричного фотоэлектрического детектора 6 и сконфигурирован для обработки измеряемого сигнала. Внешний каркас 9 сконфигурирован для фиксации и соединения линейного матричного источника лазерного света 1, оптического разделителя 2, опорной плоскости 3, линзовой матрицы 8, линейного матричного фотоэлектрического детектора 6 и модуля 4 обработки сигналов. Прозрачный компонент 7 расположен справа выше внешнего каркаса 9 и сконфигурирован для поддержания компонентов внутри чистыми.
[0087] В варианте реализации, источник 1 света, оптический разделитель 2 и опорная плоскость 3 размещены на одной и той же горизонтальной линии, и модуль 4 обработки сигналов, линейный матричный фотоэлектрический детектор 6, оптический разделитель 2 и тонкое средство 5 обращения размещены на одной и той же вертикальной линии, так, что получаются моменты времени, когда целевой свет и опорный свет достигают линейного матричного фотоэлектрического детектора; вычисляются первые оптические расстояния и вторые оптические расстояния, соответствующие целевому свету и опорному свету; число светлых и темных полос для интерференционных полос получаются модулем 4 обработки сигналов посредством использования заданного способа вычисления; число светлых и темных полос среди интерференционных полос сравнивается со стандартным числом светлых и темных полос среди интерференционных полос посредством использования заданного способа; и определяется, что имеется инородное тело на поверхности тонкого средства обращения в случае, если результат сравнения больше, чем заданный порог. С вышеупомянутыми техническими решениями, решаются следующие технические проблемы: когда регистрируется, имеется ли инородное тело на поверхности тонкого средства обращения, используя существующее механическое устройство измерения толщины, устройство инфракрасного контроля и устройство ультразвукового контроля, то трудно эффективно зарегистрировать тонкое инородное тело на поверхности банкноты вследствие низкой точности измерения механического устройства измерения толщины; инородные тела на поверхности банкноты, только имеющие отличающиеся ориентации и отличающиеся характеристики отражения могут быть зарегистрированы вследствие узкой области применения устройства инфракрасного контроля; и устройство ультразвукового контроля имеет большую длину измерительной волны и низкую точность измерения вследствие использования ультразвука как несущего сигнал.
[0088] Специалисты в данной области техники понимают необходимость краткости описания для удобства, и относительно функциональных процессов описанных выше систем, устройств и блоков, можно обратиться к соответствующим процессам в описанных выше вариантах реализации способа, который подробно здесь не описан.
[0089] В вариантах реализации в соответствии с настоящим раскрытием, следует понимать, что раскрытые системы, устройства и способы могут быть достигнуты и другим образом. Варианты реализации устройства, описанные выше, являются только схематичными. Например, блоки классифицированы по логическим функциям, и фактически модули могут быть классифицированы другим образом. Например, множественные блоки или компоненты могут быть объединены или интегрированы в другую систему, некоторые признаки могут быть исключены или не осуществлены. Иначе говоря, связь друг с другом, прямая связь или коммуникационное соединение, отображенные или обсуждаемые, может быть косвенной связью или коммуникационным соединением через некоторые интерфейсы, устройства или блоки, которые могут быть электрическими, механическими или иметь другие формы.
[0090] Блоки, показанные как отдельные компоненты, могут быть физически разделены, или нет, и отображенные компоненты, как блоки, могут быть физическими блоками, или нет, то есть, компоненты могут быть расположены в одном и том же положении или могут быть распределены по множественным сетевым блокам. Поставленная цель для варианта реализации может быть достигнута выбором части или всех блоков, как это необходимо.
[0091] Кроме того, различные функциональные блоки в различных вариантах реализации настоящего раскрытия могут быть объединены в одном процессоре, различные физические блоки могут существовать независимо друг от друга, или два или более блоков могут быть интегрированы в одном блоке. Интегрированные блоки, описанные выше, могут быть осуществлены аппаратными средствами или программными функциональными блоками.
[0092] В случае, когда интегрированные блоки осуществлены как программные функциональные блоки и продаются или используются как независимые продукты, интегрированные блоки могут быть сохранены в компьютерном читаемом носителе данных. На основании такого понимания, основные части, части, дающие вклад в обычную технологию, или часть, или все технические решения настоящего раскрытия, могут быть осуществлены как программный продукт. Компьютерный программный продукт сохраняется в носителе данных и включает в себя несколько команд для получения возможности для компьютерного устройства (которое может быть персональным компьютером, сервером или сетевым устройством и так далее) выполнять часть или все этапы в способах, описанных в соответствии с различными вариантами реализации настоящего раскрытия. Носитель данных, описанный выше, включает в себя различные типы носителей, которые могут хранить программные коды, например, USB флэш-диск, мобильный жесткий диск, Постоянное запоминающее устройство (ROM), Оперативная память (ROM), магнитный диск или компакт-диск.
[0093] Варианты реализации, описанные выше, используются только для иллюстрации технических решений настоящего раскрытия и не предназначены для ограничения настоящего раскрытия. Хотя настоящее раскрытие подробно показано в отношении вариантов реализации, описанных выше, специалисты в данной области техники поймут, что технические решения, приписанные вариантам реализации, описанным выше, могут быть изменены, или часть технических признаков может быть эквивалентно заменена. Изменение и замена не означают, что по смыслу технические решения отступают от существа и объема притязаний технических решений в вариантах реализации настоящего раскрытия.
Способ распознавания банкнот на основе накопления пыли в сортировщике и сортировщик
Устройство и способ распознавания перегиба бумажных денег
Банкнотная кассета и ее устройство установки размера банкнот
Связующее устройство
Способ и система для обработки ситуации, связанной с задержанием карты в терминале самообслуживания
Система и способ определения застревания банкноты
Поворотное устройство для перемещения бумажных денег
Способ распределения банкнот, устройство распределения банкнот и оборудование для финансового самообслуживания
Устройство для перемещения банкнот пересылающего банкноты типа
Устройство для измерения толщины листового материала
Способ и устройство гидрообработки углеводородного масла
Способ и устройство для гидрообработки риформата
Способ распознавания банкнот на основе накопления пыли в сортировщике и сортировщик
Устройство и способ распознавания перегиба бумажных денег
Архитектура стандарта cen/xfs на основе операционной системы linux и способ ее реализации
Способ и устройство для устранения перекоса бумажных носителей, а также устройство для финансового самообслуживания
Датчик холла для определения толщины листового материала
Способ, устройство и система для подавления шума
Способ и устройство для управления камерой и финансовым терминальным оборудованием
Способ и устройство для обнаружения электромагнитных помех против незаконного копирования данных карты

