Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ДЛЯ КОНТРОЛЯ ПОЛОСЫ
Вид РИД
Изобретение
РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана с патентной заявкой США №_с названием КОНТРОЛЬ ВХОДНЫХ СЕТОК И СУКОН БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ (Досье поверенного №ТЕС-064731), поданной одновременно с настоящей заявкой, патентной заявкой США №_с названием ОСНОВАННЫЙ НА ОТСЧЕТЕ КОНТРОЛЬ СЕТОК И СУКОН БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ (Досье поверенного №ТЕС-064732), поданной одновременно с настоящей заявкой, патентной заявкой США №_с названием КОНТРОЛЬ НАНОСЯЩИХ СТЕРЖНЕЙ (Досье поверенного №ТЕС-064888), поданной одновременно с настоящей заявкой, патентной заявкой США №_с названием КОНТРОЛЬ НАНОСЯЩИХ СТЕРЖНЕЙ И ЗОН КОНТАКТА НАНОСЯЩИХ СТЕРЖНЕЙ (Досье поверенного №ТЕС-064270), поданной одновременно с настоящей заявкой, и патентной заявкой США №_с названием КОНТРОЛЬ КОЛЕБЛЮЩИХСЯ КОМПОНЕНТОВ (Досье поверенного №ТЕС-064271), поданной одновременно с настоящей заявкой, раскрытия которых включены в настоящий документ в полном объеме путем ссылок.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в общем к изготовлению бумаги и более конкретно к контролю одного или нескольких компонентов в процессе изготовления бумаги.
ПРЕДПОСЫЛКИ ДЛЯ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Прижимные валы используются в непрерывных процессах в разных отраслях, включая, например, изготовление бумаги, производство стали, каландрирование пластиков и печать. В процессе изготовления бумаги используются несколько этапов для преобразования массы из напорного ящика в бумагу. Первой стадией является напуск массы из напорного ящика, которую обычно называют "волокнистой суспензией", на сеточную часть бумагоделательной машины, которую обычно называют "сетка", для формования. После напуска часть воды проходит через формующую сетку, оставляя на ней смесь жидкости и волокон. Эта смесь, называемая в отрасли "полотно", может быть обработана в оборудовании, которое далее снижает количество влаги в конечном продукте. Сетка постоянно поддерживает волокнистое полотно и переносит его на ткань, называемую сукно, на котором полотно проходит через обезвоживающее оборудование, где требуемое количество жидкости эффективно удаляется из полотна. Вода из полотна впитывается в мокрое сукно и затем может быть удалена, когда мокрое сукно проходит через всасывающий ящик. Сухие сукна также можно использовать для поддержки волокнистого полотна в паровых сушилках.
Одну из стадий обезвоживания осуществляют путем пропускания полотна через пару или больше вращающихся валов, которые формируют пресс для отжима или последовательность таких прессов. На этой стадии жидкость удаляют из полотна посредством давления, прилагаемого вращающимися валами. Валы, прилагая усилие к полотну и сукну, отжимают часть жидкость из волокнистого полотна, которая впитывается сукном. Затем полотно может быть подано в другие прессы или сушильное оборудование для дальнейшего уменьшения количества влаги в полотне. "Зоной контакта" называется область между двумя смежными валами, через которую проходит бумажное полотно.
Изменение состояния разных сеток и сукон может приводить к изменению количества жидкости и других материалов, удаляемых из полотна, что может, в свою очередь, изменить величину давления, прилагаемого к полотну в области контакта. Другие компоненты процесса изготовления бумаги, такие как посты проклейки, посты нанесения покрытия, лезвия шаберов и колеблющиеся спрысковые устройства, также могут влиять на характеристики полотна. Равномерное давление в зоне контакта по оси вала предпочтительно при изготовлении бумаги, поскольку оно позволяет получать требуемые содержание влаги, толщину, прочность листа и внешний вид поверхности. Например, неравномерное давление в зоне контакта часто приводит к получению бумаги плохого качества. Таким образом, необходимо контролировать разные компоненты в процессе изготовления бумаги с учетом их потенциального влияния на давление в одной или нескольких областях зон контакта.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном аспекте настоящее изобретение относится к системе, связанной с сенсорным валом и сопряженным валом, для сбора данных по валам. Сенсорный вал и сопряженный вал расположены относительно друг друга так, чтобы создать между ними зону контакта, причем полотно материала проходит через зону контакта в направлении от начала до конца процесса, и бесконечная полоса, которая проходит вокруг по кругу, контактирует по меньшей мере с некоторой областью полотна материала в зоне контакта или перед зоной контакта. Некоторое число датчиков расположены в разнесенных в осевом направлении местах на сенсорном вале, причем каждый датчик входит в некоторую область зоны контакта во время каждого оборота сенсорного вала, чтобы генерировать соответствующий сигнал датчика. Система также включает конструкцию для генерации периодического начального опорного сигнала, связанную с каждым оборотом бесконечной полосы по кругу, и процессор для приема периодического начального опорного сигнала и соответствующего сигнала, генерируемого каждым датчиком. После приема соответствующего сигнала датчика процессор: а) определяет один конкретный датчик из множества датчиков, который генерировал соответствующий сигнал, b) на основании периода времени между моментом генерации соответствующего сигнала датчика, и самым последним начальным опорным сигналом - идентифицирует один из множества сегментов отслеживания, связанных с бесконечной полосой, причем каждый из множества сегментов отслеживания связан, соответственно, с отличным от других периодом времени, и с) сохраняет соответствующий сигнал датчика, чтобы связать его с идентифицированным сегментом отслеживания.
В соответствии с аспектами изобретения каждый из соответствующих сигналов датчиков включает значение давления. В соответствии с другими аспектами изобретения бесконечная полоса включает прессовое сукно или металлическую сетку. Также, в соответствии с по меньшей мере некоторыми аспектами, бесконечная полоса проходит через зону контакта.
В одном аспекте настоящего изобретения процессор принимает соответствующий сигнал датчика от каждого из множества датчиков во время каждого оборота сенсорного вала и множество соответствующих сигналов датчиков во время множества оборотов сенсорного вала. Для каждого из множества соответствующих сигналов датчиков процессор идентифицирует связанный с ним осевой сегмент бесконечной полосы и один определенный для него сегмент отслеживания.
В еще одном аспекте бесконечная полоса включает n осевых сегментов, имеющих соответствующие указательные значения: 1, 2, …n; период бесконечной полосы включает т сегментов отслеживания, имеющих соответствующие указательные значения: 1, 2,…, m, так что существуют (и умножить на m) уникальных пермутаций, которые могут быть идентифицированы двухэлементной группой, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания. Соответствующее среднее значение давления может быть связано с каждой из (n умножить на m) уникальных пермутаций, причем каждое из соответствующих средних значений давления основано на ранее полученных показаниях давления в зоне контакта.
В еще одном аспекте настоящего изобретения множество сегментов отслеживания, связанных с бесконечной полосой, включают одно из а) множества окружных сегментов на бесконечной полосе и b) множества временных сегментов периода бесконечной полосы.
Еще один аспект настоящего изобретения относится к способу сбора данных по сенсорному валу и сопряженному валу, причем способ включает генерацию соответствующего сигнала датчика каждым из множества датчиков, расположенных в разнесенных в осевом направлении сенсорного вала местах, причем каждый сигнал датчика генерируется, когда каждый датчик входит в некоторую область зоны контакта между сенсорным валом и сопряженным валом во время каждого оборота сенсорного вала; причем сенсорный вал и сопряженный вал расположены друг относительно друга так, чтобы создать между ними зону контакта, и причем полотно материала проходит через зону контакта в направлении от начала до конца процесса, и бесконечная полоса, которая проходит вокруг по кругу, контактирует по меньшей мере с некоторой областью полотна материала в зоне контакта или перед зоной контакта. Способ также включает генерацию периодического начального опорного сигнала, связанного с каждым оборотом бесконечной полосы по кругу, и прием соответствующего сигнала, генерируемого каждым датчиком. Тогда, после приема соответствующего сигнала датчика, а) определяется один конкретный датчик из множества, который генерировал соответствующий сигнал, b) на основании периода времени, прошедшего между моментом генерации соответствующего сигнала датчика и самым последним начальным опорным сигналом, идентифицируется один из множества сегментов отслеживания, связанных с бесконечной полосой, причем каждый из множества сегментов отслеживания связан, соответственно, с отличным от других периодом времени, и с) соответствующий сигнал датчика сохраняется, чтобы связать его с идентифицированным сегментом отслеживания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Хотя описание изобретения включает формулу, пункты которой конкретно описывают и четко заявляют настоящее изобретение, можно полагать, что настоящее изобретение будет лучше понято из нижеследующего описания вместе с прилагаемыми фигурами чертежей, на которых одинаковые ссылочные символы обозначают одинаковые элементы.
Фиг. 1 - схематический вид с торца пресса с зоной контакта в соответствии с принципами настоящего изобретения, показывающий формирование полотна, проходящего между валами в зоне контакта, при этом ширина зоны контакта пресса обозначена буквами "NW".
Фиг. 2 - вид сбоку сенсорного вала, показывающий расположение линии датчиков в соответствии с принципами настоящего изобретения.
Фиг. 3 показывает, как оборот сенсорного вала и сопряженного вала может изменить окружной сегмент сопряженного вала, который входит в зону контакта совместно с датчиком при каждом обороте сенсорного вала, в соответствии с принципами настоящего изобретения.
Фиг. 4А и 4В - таблица, показывающая, как собираемые х показаний датчика будут связаны с разными окружными сегментами сопряженного вала, в соответствии с принципами настоящего изобретения.
Фиг. 5 - схематический чертеж, показывающий базовую архитектуру одной конкретной системы контроля и линии обработки бумаги в соответствии с принципами настоящего изобретения.
Фиг. 6, 7 и 8 - матрицы разных значений, которые могут быть вычислены для разных осевых сегментов и окружных сегментов сопряженного вала в соответствии с принципами настоящего изобретения.
Фиг. 9 - пример конфигурации способа в соответствии с принципами настоящего изобретения, в котором каждый из кругов представляет вращающийся компонент (например, вал), который помогает перемещать полотно материала 904 по технологической линии.
Фиг. 10 - детальный вид поста с мокрым сукном в соответствии с принципами настоящего изобретения.
Фиг. 11 - плоская часть петли сукна в отношении к сенсорному валу в соответствии с принципами настоящего изобретения.
Фиг. 12А-С - пост мокрого сукна с прессовым участком, включающим сенсорный вал, расположенный после поста с мокрым сукном, который не имеет прессового участка с сенсорным валом, в соответствии с принципами настоящего изобретения.
Фиг. 12D, 12Е и 12F - детальные виды альтернативного поста с мокрым сукном в соответствии с принципами настоящего изобретения.
Фиг. 13 - сенсорный вал, связанный с зоной контакта прессового участка поста с сукном, который расположен ближе всего и после металлической сетки, в соответствии с принципами настоящего изобретения.
Фиг. 14А-14С - таблица, показывающая, как сбор показаний датчика будет связан с разными сегментами отслеживания сукна в соответствии с принципами настоящего изобретения.
Фиг. 15А-15С - таблицы, показывающие, как сбор показаний датчика будет связан с разными сегментами отслеживания другого сукна в соответствии с принципами настоящего изобретения.
Фиг. 16 - разные синхронизированные по времени расположения одних и тех же показаний датчиков в соответствии с принципами настоящего изобретения.
Фиг. 17 - технологическая схема одного примера способа синхронизации данных по времени в соответствии с принципами настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящая заявка связана с каждой из следующих заявок: патентная заявка США №14/268,672 с названием СПОСОБ И СИСТЕМА, СВЯЗАННЫЕ С СЕНСОРНЫМ ВАЛОМ И СОПРЯЖЕННЫМ ВАЛОМ, ДЛЯ СБОРА ДАННЫХ ПО ВАЛАМ, поданная 2 мая 2014 г., патентная заявка США №14/268,706 с названием СПОСОБ И СИСТЕМА, СВЯЗАННЫЕ С СЕНСОРНЫМ ВАЛОМ И СОПРЯЖЕННЫМ ВАЛОМ, ДЛЯ СБОРА ДАННЫХ, ВКЛЮЧАЮЩИЕ ПЕРВЫЙ И ВТОРОЙ МАССИВЫ ДАТЧИКОВ, поданная 2 мая 2014 г., и патентная заявка США №14/268,737 с названием СПОСОБ И СИСТЕМА, СВЯЗАННЫЕ С СЕНСОРНЫМ ВАЛОМ, ВКЛЮЧАЮЩИМ МНОЖЕСТВО ДАТЧИКОВ, И СОПРЯЖЕННЫМ ВАЛОМ, ДЛЯ СБОРА ДАННЫХ ПО ВАЛАМ, поданная 2 мая 2014 г., раскрытия которых включены в настоящий документ в полном объеме путем ссылки.
В последующем подробном описании предпочтительных вариантов осуществления сделаны ссылки на прилагаемые чертежи, которые являются его частью и на которых показаны для иллюстрации, но не для ограничения, конкретные предпочтительные варианты осуществления, которые могут использоваться для осуществления изобретения на практике. Следует понимать, что могут быть использованы другие варианты осуществления, и что могут быть внесены изменения, но без нарушения сущности и объема настоящего изобретения.
Как показано на Фиг. 1, сенсорный вал 10 и сопряженный вал 11 определяют зону контакта 12 для приема волокнистого полотна 16, такого как бумажное полотно, чтобы приложить давление к полотну 16. Предполагается, что в некоторых случаях полотно может поддерживать бесконечная суконная полоса, так что сукно и полотно входят в зону контакта 12. Сенсорный вал 10 включает внутренний основной вал 20 и наружное покрытие 22 вала. Как показано на Фиг. 2, группа 24 датчиков 26 расположена, по меньшей мере частично, в покрытии 22 вала. Группа 24 датчиков 26 может быть расположена по спиральной линии вокруг всей длины вала 10 одним оборотом, чтобы создать винтовую линию, которая является обычной геометрией датчиков для покрытий валов. Однако винтовая линия является просто примером, и может быть предусмотрено любое расположение, в котором по меньшей мере один датчик помещен в каждое осевое положение в любом месте на окружности, в котором будет осуществляться сбор данных. Каждый датчик 26 может, например, измерять давление, оказываемое на датчик, когда он входит в область зоны контакта 12 между валами 10 и 11. В частности, группа 24 датчиков 26 может быть расположена в сенсорном вале 10, например, в разных осевых положениях или сегментах на сенсорном вале 10, причем такие осевые сегменты предпочтительно имеют одинаковые размеры. В показанном варианте осуществления есть 14 осевых сегментов, обозначенных числами 1-14 на Фиг. 2, и каждый имеет расположенный в нем один датчик 26. Также предполагается, что группа 24 датчиков 26 может быть расположена линейно, чтобы определить линию датчиков, т.е., все датчики расположены в одном месте на окружности. Средний специалист легко поймет, что может быть больше четырнадцати или меньше четырнадцати осевых сегментов, а также соответствующее равное число датчиков, расположенных по оси сенсорного вала. Также ниже в описании каждый датчик 26 может быть назван, например, датчиком давления, но предполагаются и другие типы датчиков такие как, например, датчики температуры.
Поскольку при производстве бумаги необходимо равномерное давление в зоне контакта, правильное вычисление и отображения профиля давления в зоне контакта также очень важно, поскольку любые исправления или изменения, которые будут сделаны а вращающихся валах на основании неточно вычисленного профиля давления в зоне контакта определенно увеличат эксплуатационные проблемы. Существуют три первичных измерения вариабельности. Профиль давления в зоне контакта имеет вариабельность, которая может быть названа поперечной вариабельностью, поскольку она является вариабельностью среднего давления в поперечном положении в зоне контакта. Еще один тип вариабельности представляет вариабельность скоростных измерений в каждом положении на одной линии датчиков. Эта вариабельность представляет вариабельность другого оборудования в процессе изготовления бумаги, такого как, например, металлические сетки и сукна, и включает вариабельность вращения сопряженного вала, т.е., вала, сопряженного с сенсорным валом. Третий тип вариабельности в профиле зоны контакта включает вариабельность множественных датчиков, описанную ниже, в каждом поперечном положении вала. Эта вариабельность представляет собой "вариабельность вращения" сенсорного вала, когда он проходит через его множество положений отслеживания, и ее нельзя обнаружить, если не использовать некоторое число датчиков в каждом положении.
Одно преимущество встраивания группы датчиков в валы с покрытием заключается в том, что можно измерять профиль давлений в реальном времени и регулировать давление нагрузки и выпуклость или кривизну валов (используя, например, внутренние гидроцилиндры), чтобы получить плоский профиль давления. В качестве альтернативы одной группе датчиков, на сенсорном вале можно использовать два множества или массива датчиков, как более подробно объяснено в упомянутой выше патентной заявке США №14/268,706, которая включена в настоящий документ в полном объеме путем ссылки. Сенсорный вал может быть разделен, например, на 14 осевых сегментов. Первое и второе множества датчиков расположены, по меньшей мере частично, в покрытии вала. Каждый из первого множества датчиков расположен в одном из 14 осевых сегментов сенсорного вала. Первое множество датчиков может быть расположено по спиральной линии, проходящей по всей длине вала за один оборот, чтобы создать винтовую конфигурацию. Второе множество датчиков также может быть расположено по спиральной линии, которая проходит по всей длине вала за один оборот, чтобы создать винтовую конфигурацию. Первое и второе множества датчиков могут быть отделены одно от другого на угол 180 градусов. Каждый датчик измеряет давление на нем, когда он входит в область зоны контакта. Допускается, что первое и второе множества датчиков могут быть расположены линейно, чтобы создать первую и вторую линии датчиков, которые отделены друг от друга на угол приблизительно 180 градусов. Также допускаются разные альтернативные конфигурации множества датчиков. Например, множество датчиков может быть расположено по спиральной линии, которая проходит по всей длине вала за два оборота.
Обычно сенсорный вал 10 и сопряженный вал 11 имеют разные размеры, т.е., они имеют разные размеры по радиусу и окружности. Каждый вал может иметь изменения в размере по окружности вдоль своей оси. Также, когда вал вращается, расстояние от центральной оси (размер по радиусу) до наружной поверхности может меняться для каждого осевого положения при одинаковом угле поворота, даже когда размеры по окружности должны быть одинаковыми для каждого осевого положения.
Например, валы периодически шлифуют, что приводит к небольшим произвольным изменениями в диаметре по сравнению со спецификацией изготовителя. Также может существовать проскальзывание одного или нескольких валов, приводящее к тому, что поверхность сенсорного вала движется со скоростью, отличающейся от поверхности сопряженного вала. Следовательно, два вала редко имеют точно такой же период оборота или имеют периоды, которые являются точными гармониками.
Таким образом, когда сенсорный вал 10 и сопряженный вал 11 совершают многочисленные обороты относительно друг друга, конкретный датчик 26 может не всегда входить в область зоны контакта 12 с той же частью окружности сопряженного вала 11, как это было при предыдущем обороте. Эту характеристику можно использовать для создания таблиц данных, соответствующих поверхности сопряженного вала 11. Разные матрицы среднего давления, каждая из которых собрана и построена в разные периоды времени, можно сравнивать между собой, чтобы изучить, как они отличаются одна от другой. Вариабельность между разными таблицами данных может подсказать возможные проблемы с сопряженным валом 11, такие как неравномерность поверхности вала, износ подшипников и прогиб вала. Анализ вариабельности данных с датчиков может указать возможные проблемы с предыдущим или последующим в линии оборудованием, например, с предыдущими валами, расположенной выше по линии формующей сеткой, расположенным выше по линии сукном или последующими валами.
Сенсорный и сопряженный валы 10 и 11 могут быть каждый разделены на 14 осевых сегментов. Все осевые сегменты на сенсорном вале 10 могут иметь или не иметь одинаковую длину, и все осевые сегменты на сопряженном вале 11 также могут быть или не быть одной длины. В показанном варианте осуществления предположено, что все осевые сегменты на сенсорном вале 10 имеют одинаковую длину, и все осевые сегменты на сопряженном вале 11 имеют одинаковую длину. Осевые сегменты на сенсорном вале 10 могут быть совмещены с осевыми сегментами на сопряженном вале 11. Кроме того, сопряженный вал 11 может быть разделен на отдельные окружные сегменты, например, на 22 окружных сегмента, все по существу одного размера.
На Фиг. 3 показано, как вращение сенсорного вала 10 и сопряженного вала 11 может изменить окружной сегмент сопряженного вала 11, который входит в зону контакта совместно с датчиком при каждом обороте сенсорного вала 10. На Фиг. 3 показана серия изображений положений 1-23 сенсорного вала 10, которые также соответствуют 22 оборотам сенсорного вала 10 и 23 оборотам сопряженного вала 11. В крайней левой позиции на Фиг. 3 показано исходное положение (т.е., положение, в котором получают показание первого датчика) и в крайней правой позиции показано положение двух валов 10 и 11 после 22 оборотов сенсорного вала 10 после получения показания первого датчика. В исходном положении окружной сегмент №1 сопряженного вала 11 расположен в области зоны контакта 12 вместе с датчиком 26А. Сопряженный вал 11 в данном примере вращается немного быстрее чем сенсорный вал 10, так что на изображении второго положения после полного оборота из исходного положения датчик 26А будет снова расположен в области зоны контакта 12, но сопряженный вал 11 будет повернут так, что окружной сегмент №2 будет находиться в области зоны контакта 12. Значения на Фиг. 3 выбраны просто для примера, чтобы проиллюстрировать конкретными цифрами рабочие принципы настоящего изобретения. В соответствии с примерами значений на Фиг. 3, когда сенсорный вал совершил 22 оборота, сопряженный вал 11 совершит 23 оборота. Таким образом, после 21 оборота из исходного положения (т.е., положения №22 на Фиг. 3), датчик 26А сенсорного вала 10 сможет собрать 22 показания при том предположении, что он получил показание в исходном положении и "просмотрел" все части окружности сопряженного вала. Поэтому 22 окружных сегмента выбраны как пример числа окружных сегментов. Средний специалист в данной области техники поймет, что сопряженный вал 11 может быть разделен на большее число окружных сегментов, но при этом потребуются больше чем 22 оборота сенсорного вала 10, чтобы собрать данные от датчика 26А, соответствующие каждому из окружных сегментов.
Редко случается, что период сопряженного вала будет находиться в целочисленном отношении с периодом сенсорного вала. Следовательно, весьма маловероятно, что между этими валами картинка будет стабильной, и будет проявляться тенденция к выравниванию результатов замеров сегментов отслеживания, как сказано ниже.
Поскольку в показанном варианте осуществления один датчик 26А входит в область зоны контакта 12 одновременно с разными окружными сегментами сопряженного вала 11, давление в зоне контакта, измеряемое одним датчиком 26А, может быть разным в течение последовательных оборотов вала из-за изменения давления, вызываемого сопряженным валом 11. Аспекты настоящего изобретения предусматривают табличные показания или сигналы от каждого датчика 26 из группы 24 через некоторое время, чтобы видеть как меняются показания давления или сигналы для каждого датчика из-за того, что каждый датчик входит в область зоны контакта 12 одновременно с другими окружными сегментами сопряженного вала 11. Как сказано выше, табличные данные могут быть использованы для выявления возможных проблем с сопряженным валом 11 и, как более подробно сказано ниже, сбор данных может выполняться с возможными проблемами на предыдущем или последующем рабочим оборудованием кроме сенсорного вала 10 и сопряженного вала 11.
Следовательно, настоящее изобретение предполагает использование датчиков 26 для измерения вариабельности вращения, которая создается при скоростном вращении сопряженного вала 11, когда сигналы давления или показания датчиков 26 синхронизированы во времени с положением сопряженного вала. Для того, чтобы измерить вариабельность вращения, сопряженный вал 11 должен оказывать какое-то влияние на измеряемое давление в зона контакта 12. Главное влияние на отслеживаемое давление в зоне контакта будет, вероятно, заключаться в том, что сопряженный вал 11 прямо прижат к сенсорному валу 10. Однако можно синхронизировать измерения датчиками с предыдущими валами, которые формируют еще одну зону контакта и влияют на содержание воды и толщину полотна, которые влияют на давление в зоне контакта, отслеживаемое сенсорным валом 10. Кроме того, поскольку валы (не показаны) в последующей зоне контакта могут натянуть полотно и вызвать изменения в его натяжении, может быть можно также синхронизировать измерения датчиков с такими валами. Сенсорный и сопряженный валы 10 и 11 будут использоваться для иллюстрации принципов настоящего изобретения; однако все принципы применимы к предыдущему и последующему оборудованию в линии, такому как предыдущие и последующие валы, предыдущий пост нанесения покрытия, предыдущая формующая сетка или предыдущее сукно.
Продолжая ссылаться на пример на Фиг. 3, можно сказать что сопряженный вал 11 может иметь характеристики вращения, которые создают, например, синусоидальный профиль давления, составляющий приблизительно 8 фунтов на кв. дюйм от пика до пика. В примере, показанном на Фиг. 4А и 4В, при пуске профиль давления равен "0", когда окружной сегмент №1 находится в области зоны контакта 12. На Фиг. 4А и 4В показана таблица, как собранные данные 51 показания с датчика 26А связаны с разными окружными сегментами сопряженного вала 11. B левом столбце 402 приведены последовательные номера, присвоенные показаниям датчика, и в среднем столбце 404 представлены значения показаний давления с датчика 26А согласно вышеупомянутому синусоидальному профилю. Каждое значение показания давления синхронизировано по времени с периодом оборота сопряженного вала 11 путем связывания этого значения с одним из окружных сегментов сопряженного вала 11, который находился в области зоны контакта 12, когда было получено это показание давления.
Одним из удобных путей характеризации такой разницы является использование единиц измерения, которые измеряют эту разницу как временные сегменты, например, как 22 временных сегмента в показанном варианте осуществления. Длительность каждого временного сегмента равна периоду сопряженного вала, разделенному на число заданных временных сегментов. Как сказано ниже, заданное число временных сегментов может соответствовать заданному числу окружных сегментов сопряженного вала. Период сенсорного вала 10 может быть описан как на x временных сегментов меньше/больше чем период сопряженного вала 11. Например, согласно Фиг. 3, сенсорный вал 10 может иметь период, который на 1,0 временной сегмент сопряженного вала больше чем период сопряженного вала 11 (в равной мере, сопряженный вал 11 может иметь период, который на 1,0 временной сегмент сопряженного вала меньше чем период сенсорного вала). В таком примере, когда сенсорный вал 10 совершает один полный оборот, сопряженный вал 11 совершит больше чем один полный оборот на величину, равную 1,0 временного сегмента сопряженного вала из-за того, что он имеет меньший период чем сенсорный вал 10.
Как сказано выше, 22 временных сегмента периода сопряженного вала могут соответствовать 22 окружным сегментам на сопряженном вале 11. Таким образом, даже если на концептуальном уровне именно период сопряженного вала 11 разделен на некоторое число временных сегментов, причем такая концепция может соответствовать физической окружности сопряженного вала 11, тогда каждый отдельный период временного сегмента сопряженного вала также соответствует какому-то окружному сегменту на сопряженном вале 11. Соответственно, различия в периодах оборотов между сенсорным валом 10 и сопряженным валом 11, измеренные в единицах "временных сегментов", можно также легко рассматривать в единицах "окружных сегментов". В описании по меньшей мере некоторых вариантов осуществления настоящего изобретения, ниже, ссылка на "окружные сегменты" сделана для помощи в понимании аспектов примера варианта осуществления настоящего изобретения. Однако средний специалист в данной области техники поймет, что можно также использовать "временные сегменты" и периодичность сопряженного вала, но без нарушения объема настоящего изобретения. "Окружные сегменты" и "временные сегменты" также могут упоминаться в родовом понимании как "сегменты отслеживания", причем этот последний термин охватывает оба типа сегментов, связанных с сопряженным валом 11 и другими периодическими компонентами, которые описаны ниже.
Как сказано выше, данные, подобные данным на Фиг. 4А и 4В могут быть получены для каждого датчика 26 из группы 24. Таким образом, когда каждый датчик 26 входит в область зоны контакта 12 и снимает показание давления, конкретная часть наружной поверхности сопряженного вала в осевом месте, соответствующем этому датчику, и в одном из 22 окружных сегментов сопряженного вала 11 также будет находиться в зоне контакта 12. Сегмент сопряженного вала, который находится в зоне контакта 12, может быть определен разными способами. Один способ включает индексацию одного из 22 сегментов сопряженного вала сигналом срабатывания, который подается каждый раз, когда сопряженный вал 11 совершает один оборот; период времени, прошедший с последнего сигнала срабатывания, можно использовать для определения, какой из 22 сегментов (измеренный относительно индексированного сегмента) находится в зоне контакта 12. Например, если время между каждой подачей сигнала срабатывания составляет 220 мс, то каждый временной сегмент равен 10,0 мс, что соответствует одному из 22 окружных сегментов сопряженного вала. Сигнал давления, генерируемый датчиком 26 в области зоны контакта через 30 мс после сигнала срабатывания, будет присвоен временному сегменту 3 после прохождения трех сегментов по 10,0 мс, например, через область зоны контакта, откуда подан сигнал срабатывания при генерации сигнала давления.
На Фиг. 5 показан процессор 903, который может генерировать профиль зоны контакта в реальном времени. Помимо этого процессор 903 может также принимать сигнал срабатывания 901 в связи с оборотом сопряженного вала 11. Как было только что сказано, некоторый окружной сегмент или положение 907 сопряженного вала 11 можно проиндексировать или снабдить кодом, чтобы генератор сигналов 900 детектировал кодированный сегмент 907 и генерировал сигнал срабатывания 901 каждый раз, когда генератор сигналов 900 определит, что сегмент 907 сопряженного вала 11 совершил еще один полный оборот. Когда сопряженный вал 11 повернется так, что окружное положение или сегмент 907 будет совмещен с детекторной частью генератора сигналов 900, один из 22 окружных сегментов, который будет расположен в области зоны контакта, может быть произвольно помечен как первый окружной сегмент, так что другие окружные сегменты могут быть пронумерованы относительно этого первого сегмента. Это конкретное угловое положение сопряженного вала 11 может считаться контрольным положением. Когда сопряженный вал 11 вращается, его угловое положение будет изменяться относительно этого контрольного положения, и величина такого изменения определяет, какой из 22 окружных сегментов будет расположен в области зоны кон такта. Соответственно, на основании углового положения сопряженного вала 11 относительно такого контрольного положения можно определить, какой из 22 окружных сегментов находится в области зоны контакта, когда конкретный датчик 26 генерирует сигнал давления. На Фиг. 5 показана общая архитектура одной конкретной системы для контроля качества бумажной продукции. Система с Фиг. 5 включает процессор 903, упомянутый выше, который определяет результат измерения, и систему управления, которая оценивает и анализирует работу вала 11. Процессор 903 включает любое устройство, которое принимает введенные данные, обрабатывает эти данные по командам компьютера и генерирует выходные данные. Такой процессор может быть ручным устройством или ноутбуком, настольным компьютером, микрокомпьютером, устройством для цифровой обработки сигнала (DSP), главным компьютером, сервером, другими программируемыми компьютерными устройствами или любым их сочетанием. Процессор 903 также может быть реализован с использованием устройств программируемой логики, таких как логические матрицы, программируемые пользователем (FPGA) или, альтернативно, реализован как специализированные интегральные схемы (ASIC) или подобные устройства. Процессор 903 может вычислять и отображать профиль среднего давления в реальном времени, вычисляемый в конце предшествующего сеанса сбора. Например, сигналы давления от датчиков 26 могут быть посланы на беспроводной приемник 905 с передатчика (или передатчиков) 40, расположенных на сенсорном вале 10. Затем сигналы могут быть направлены процессору 903. Предполагается, что процессор 903, в дополнение к вычислению профиля среднего давления в реальном времени, может использовать профиль среднего давления в реальном времени для автоматической коррекции выпуклости и механизмов загрузки для получения плоского профиля давления. Выпуклость и механизмы загрузки также могут быть скорректированы вручную оператором, использующим информацию из профиля среднего давления в реальном времени.
Существуют и другие способы определения положения сопряженного вала 11. Один способ заключается в использовании высокоточного тахометра, который делит вращение вала 11 на число частей, возможно 440. В данном примере на каждый временной сегмент будет приходиться по 20 частей на высокоточном тахометре. Все способы определения положения сопряженного вала включены в настоящее изобретение.
В примере системы, в которой 14 датчиков осевого расположения 26, каждый из которых может быть уникально обозначен с использованием указательного значения осевого сегмента от 1 до 14, и существует 22 окружных сегмента на сопряженном вале 11 (или временных сегмента), каждый из которых может быть уникально обозначен с использованием указательного значения сегмента отслеживания от 1 до 22, существуют 308 (т.е., 22×14=308) уникальных пермутаций пар, состоящих из номера датчика и номера окружного сегмента (или номера временного сегмента), при этом каждая пермутация идентифицируется с помощью двухэлементной группы, включающей указательное значение соответствующего осевого сегмента и указательное значение соответствующего сегмента отслеживания. В показанном варианте осуществления номера датчиков также соответствуют осевым сегментам сопряженного вала. Поэтому собранные данные могут считаться матрицей 22×14, которая показана на Фиг. 6. Каждая строка на Фиг. 6 представляет один из 22 окружных сегментов сопряженного вала (или временных сегментов), и каждый столбец представляет один из 14 датчиков 26 осевого расположения, при этом каждая ячейка представляет одну из возможных 308 пермутаций. Каждый столбец также соответствует части наружной поверхности сопряженного вала в осевом положении, соответствующем датчику 26, присвоенному этому столбцу. Каждая ячейка представляет комбинацию номера датчика (или номера осевого сегмента) и конкретного окружного сегмента (или временного сегмента) сопряженного вала. Например, ячейка 100 представляет значение, которое будет относиться к показанию давления, полученному, когда датчик номер 14 (номер 14 из датчиков 1-14, входящих в группу 24) вошел в область зоны контакта 12 одновременно с часть наружной поверхности сопряженного вала в осевом положении, соответствующем датчику номер 14 и окружному сегменту номер 1 (или временному сегменту номер 1) сопряженного вала. Таким образом каждая ячейка матрицы представляет уникальную пермутацию из всех возможных пермутаций осевых сегментов с разными номерами (например, 1-14) и окружных сегментов с разными номерами (например, 1-22) (или временных сегментов 1-22). Значение, сохраненное в конкретном элементе матрицы за счет этого связано с одной конкретной пермутацией возможных номеров осевых сегментов и номеров окружных сегментов (или временных сегментов).
Матрица на Фиг. 6 может быть, например, матрицей отсчетов, каждая ячейка которой представляет число раз, которое конкретный датчик и конкретная часть наружной поверхности сопряженного вала в осевом положении, соответствующая этому датчику и конкретному окружному сегменту сопряженного вала, одновременно находились в области зоны контакта 12, чтобы получить показание давления. На Фиг. 7 показана матрица подобного размера (т.е., 22×14), но значения ячеек матрицы отличаются от таковых на Фиг. 6. Ячейка 200 также представляет значение, которое относится к датчику номер 14 (или осевому сегменту 14 из осевых сегментов 1-14 сопряженного вала 11) и окружному сегменту 1, но в данном примере значение является кумулятивным общим значениям показаний давления, например, в фунтах на кв. дюйм, полученных датчиком для этого окружного сегмента во время некоторого множество оборотов сенсорного вала 10. Так, каждый раз когда датчик номер 14Входит в область зоны контакта 12 вместе с окружным сегментом №1, полученное значение давления суммируется с содержанием ячейки 200. Каждая из 308 ячеек в этой матрице на Фиг. 7 вычисляется аналогичным образом для соответствующих им датчиков и сегментов.
Из матриц на Фиг. 6 и Фиг. 7 можно вычислить матрицу среднего давления, показанную на Фиг. 8. Например, ячейка 100 включает число показаний давления, связанных с датчиком номер 14 (или осевым сегментом 14 сопряженного вала 11) и окружным сегментом номер 1, а ячейка 200 включает итоговую сумму всех этих показаний давления. Так, если разделить ячейку 200 на ячейку 100, это даст среднее значение давления для этой конкретной пермутаций из номера датчика и номера окружного сегмента сопряженного вала, которые вошли в область зоны контакта 12 одновременно.
В результате, матрица на Фиг. 8 представляет среднее значение давление, которое отслеживается для каждого конкретного номера датчика и номера окружного сегмента сопряженного вала. Продолжительность времени сбора таких данных определяет, сколько разных показаний давления используются в таких вычислениях.
На необработанные показания давления или сигналы от датчиков 26 могут влиять разные компоненты системы, которые перемещают полотно материала. В частности, средние значения в матрице среднего давления на Фиг. 8 относятся к вариабельности, синхронизированной с сопряженным валом 11. Однако могут быть другие компоненты вариабельности, которые не синхронизированы с сопряженным валом 11, такие как вариабельность в поперечном направлении (CD), показанная на Фиг. 2. Одной мерой этой вариабельности является вычисление среднего значения для каждого столбца матрицы среднего давления. Таким образом, матрица среднего давления на Фиг. 8 также может включать строку 302, которая представляет среднее значение для столбца. Каждый из 14 столбцов может иметь 22 ячейки, которые могут быть усреднены для вычисления среднего значения для этого столбца. Например, ячейка 304 будет средним значением для 22 ячеек второго столбца матрицы среднего давления.
Отдельные сеансы сбора показаний давления для заполнения матриц на Фиг. 6, 7 и 8 могут быть чрезмерно короткими для построения надежных и полных матриц из-за буферизации данных и ограничений по сроку службы аккумуляторов систем сбора данных, связанных с сенсорным валом 10. В таких случаях последовательные сеансы сбора могут быть объединены без обнуления матриц (т.е., матриц отсчетов и матриц суммирования) после начала нового сеанса сбора или объединения отдельных матриц, собранных после события. Следовательно, сбор можно остановить и повторно начать без потери надежности данных, если поддерживается синхронизация сопряженного вала. В частности, объединение нескольких сеансов сбора, которые разделены интервалами времени может быть полезно для наполнения матриц. Например, если разница в периодах между двумя валами была бы ближе к 2,001 вместо 2,14 временных/окружных сегментов, сбор имел бы тенденцию только временных/окружных сегментов с четными номерами в короткий срок (т.е., сегменты с четными номерами это те сегменты, которые имеют четные номера сегментов, начиная от стартового) до достаточного времени, которое прошло до перехода сбора на нечетные временные/окружные сегменты. Объединение сеансов сбора, разделенных длительной задержкой во времени может помочь сдвинуть сбор так, что данные получают более равномерно для всех разных временных/окружных сегментов, поскольку нет ожидания того, что период сопряженного вала совпадет с произвольными интервалами времени между сеансами сбора.
Пресс на Фиг. 1 может быть расположен в разных положениях в технологической цепочке или последовательности разных компонентов, которые являются частью современного процесса обработки бумаги. На Фиг. 9 показан пример способа и конфигурация системы в соответствии с принципами настоящего изобретения, где каждый из кругов представляет вращающийся компонент (например, вал), который помогает продвигать полотно материала 904 в способе/системе. Технологический процесс начинается с напорного ящика 902, откуда волокнистая суспензия подается на металлическую сетку 906, позволяющую жидкости суспензии свободно стекать. С металлической сетки 906 полотно материала 904 переходит на первый пост 908, который помогает сушить полотно материала 904. Сукно 909 на первом посту 908 представляет собой бесконечную полосу, предназначенную для петлеобразного движения вокруг некоторого числа валов 940. В примере на Фиг. 9 использованы четыре вала 940. Сукно 909 входит в прессовую область 916 между одним из валов 940 и сенсорным валом 918 с полотном материала 904. Сенсорный вал 918 может работать подобно сенсорному валу 10 с Фиг. 1. После поста 908 с мокрым сукном расположен еще один пост 910 с мокрым сукном 911, движущимся петлеобразно вокруг еще одной группы из четырех валов 941. Также есть вторая прессовая область 920 с прижимным валом 922, который в показанном варианте осуществления не является сенсорным валом. На последнем посту 912 с мокрым сукном сукно 913 движется петлеобразно вокруг еще одной группы из четырех валов 942. Сукно 913 вместе с полотном материала 904 отжимается одним из валов 942 и вторым сенсорным валом 926 в третьей прессовой области 924. Сукна 909, 911, 913 прижимаются к полотну материала в соответствующих прессовых областях 916, 920, 924, чтобы впитывать жидкость из полотна материала 904. Таким образом, полотно материала 904 сушится, проходя через посты 908, 910, 912 с мокрым сукном. Под "сушкой" понимается, что волокна в полотне материала 904 имеют более высокий процент по массе волокон после постов с мокрым сукном чем до них. Может быть выполнена дополнительная сушка отдельными сушильными устройствами 914, пока полотно материала 904 не пройдет дальше в процессе с Фиг. 9. Разные сукна и валы на Фиг 9 и расстояние между постами показаны не по масштабу, а представлены для упрощения описания разных аспектов вариантом осуществления настоящего изобретения. Например, полотно материала 904 не проходит без поддержки на большое расстояние. Обычно полотно материала 904 будет снято с одного сукна и подхвачено следующим сукном. Помимо этого, полотно материала может поддерживаться другими поддерживающими валами и за счет натяжения между валами.
Материал сукна (например, 909) может иметь изменения, которые оказывают разное действие на полотно материала 904. Например, участки со швами, износом или даже отверстиями не могут столь же эффективно удалять жидкость из полотна материала 904 как те части сукна 909, которые имеют хорошее состояние. Таким образом, некоторые участки полотна материала 904 могут иметь больше или меньше воды по сравнению с другими участками полотна материала 904 из-за изменений в состоянии сукна 909, т.е., изношенная часть сукна 909 может не удалять столько влаги с участка полотна материала, с которым она контактирует, сколько удаляет часть сукна, которая имеет хорошее состояние и контактирует с другим участком полотна материала. Когда более мокрый участок полотна материала проходит через зону контакта в одной из прессовых частей (например, 916), давление, ощущаемое датчиком на сенсорном вале (например, 918) может быть больше чем у более сухого участка полотна материала 904, проходящего через эту зону контакта. Кроме того, сукна 909, 911, 913 по своей структуре могут быть пористыми и, таким образом, некоторые части сукна могут загрязниться сором, волокнами или другими загрязнителями. Когда загрязненная часть сукна прижимается или иным образом взаимодействует с участком полотна материала 904, влияя на него, из этого участка будет удалено меньше влаги по сравнению с другими участками полотна материала 904, которые были прижаты к не загрязненным или менее загрязненным частям сукна. Когда такой участок полотна материала, из которого удалено меньше влаги, проходит через зону контакта в одной из прессовых частей (например, 916), давление, ощущаемое датчиком на сенсорном вале (например, 918) может быть больше по сравнению с другими участками, из которых удалено больше влаги после прохождения через зону контакта. Кроме того, когда загрязненная часть сукна проходит через зону контакта в одной из прессовых частей (например, 916), давление, ощущаемое датчиком на сенсорном вале (например, 918) может быть больше по сравнению с тем, когда незагрязненная часть сукна проходит через эту зону контакта. Таким образом, показание давления, полученное в зоне контакта, может указывать на влияние, которое сукно оказало на полотно материала 904 перед такой зоной контакта, в дополнение к влиянию сукна при прохождении через зону контакта.
На Фиг. 10 детально показан пост 912 с мокрым сукном с Фиг. 9 в соответствии с принципами настоящего изобретения. Сукно 913 лежит в поперечном машине направлении в плоскости чертежа и, как сказано выше, представляет собой бесконечную полосу, которая проходит вокруг по кругу вокруг четырех валов 942 в направлении, обозначенном стрелкой 1001. Соответственно, сукно 913 имеет определенный период оборота по этой окружной траектории. Таким образом, разные части сукна 913 периодически проходят через зону контакта 1201 вместе с полотном материала 904. Между сенсорным валом 926 и сопряженным валом 942А формируется зона контакта 1201 подобно тому, как сказано выше в отношении Фиг. 1-3.
Сукно 913 может быть разделено на определенное число осевых сегментов, например, 14В показанном варианте осуществления, так что 14 осевых сегментов сукна 913 будут совмещены по оси с 14 разнесенными в осевом направлении датчиками 26 на сенсорном вале 926.
Пост 912 с сукном может иметь период оборота, который может быть разделен на разные сегменты отслеживания таким же образом, как период оборота сопряженного вала 11 был разделен на 22 сегмента отслеживания, как сказано выше. Таким образом, сегменты отслеживания, относящиеся к сукну 913, могут быть множеством временных сегментов периода оборота бесконечной суконной полосы 913 по кругу или множеством физических окружных сегментов на бесконечной суконной полосе 913. Из сегментов сукна на Фиг. 10 указаны только сегменты 1004А, 1004В, 1004С, 1004АА, а остальные сегменты конкретно не обозначены и могут быть, например, отдельными окружными сегментами, каждый из которых имеет указательное значение относительно фиксированного контрольного положения 1006 на сукне 913.
В качестве примера, контрольное положение 1006 может совершать один полный оборот по кругу за такое же время, пока сенсорный вал делает 31 оборот. Соответственно, сукно 913 может быть разделено на 31 физический окружной сегмент 1004А-1004АЕ или, в равной мере, период оборота сукна 913 по кругу может быть разделен на 31 временной сегмент. Другими словами, поскольку соответствующие части сукна 913 и сенсорного вала 926 в некоторой области зоны контакта 1201 проходят по существу с одинаковой линейной скоростью, окружность петли сукна 913 будет в этом примере приблизительно в 31 раз больше чем окружность сенсорного вала 926. Как сказано выше, разные валы, петли сукна и металлические сетки показаны не по масштабу, а представлены для того, чтобы пояснять аспекты настоящего изобретения.
Используя те же принципы, что и при описании сопряженного вала 11 с Фиг. 3, сукно 913 может быть разделено, например, на 31 сегмент отслеживания. В качестве примера и в соответствии со сказанным ниже, часть 1002 сукна 913 может быть расположена на окружном сегменте 1004АА сукна 913, определяющим сегмент отслеживания №27 и в месте по оси, совмещенном с датчиком давления 26А (одним из 14 датчиков давления на сенсорном вале 926 в показанном варианте осуществления), в котором давление в этой области зоны контакта 1201 приблизительно на 4 фунта на кв. дюйм больше чем нулевое давление на всех остальных частях сукна 913 в разных местах по оси и по окружности. Таким же образом, как данные на Фиг. 4А и 4В получают в синхронизации по времени с периодом оборота сопряженного вала 11, показания датчиков из области зоны контакта 1201, сформированной сенсорным валом 926 и сопряженным валом 942А, также можно получать в синхронизации по времени с периодом оборота сукна 913.
На Фиг. 10 показан процессор 903, который может принимать сигнал срабатывания, относящийся к обороту сукна 913. Окружной сегмент или положение 1006 сукна 913 может быть проиндексировано или кодировано, так что генератор сигналов 900А детектирует кодированный сегмент 1006 и генерирует сигнал срабатывания каждый раз, когда генератор сигналов 900А определит, что сегмент 1006 сукна 913 совершил еще один полный оборот. Когда сукно 913 повернется так, что окружное положение или окружной сегмент 1006 будет совмещен с детекторной частью генератора сигналов 900А, один из 31 окружного сегмента, который будет расположен в области зоны контакта, может быть произвольно помечен как первый окружной сегмент, и другие окружные сегменты могут быть пронумерованы относительно этого первого сегмента. Это конкретное угловое положение сукна 913 можно считать контрольным положением. При вращении сукна 913 его угловое положение будет изменяться относительно этого контрольного положения, и величина этого изменения будет определять, какой из 31 окружного сегмента будет расположен в области зоны контакта 1201. Соответственно, на основании углового положения сукна 913 относительно контрольного положения можно определить, какой из 31 окружного сегмента находится в области зоны контакта, когда датчик 26А генерирует сигнал давления.
Таблица на Фиг. 14А-14С показывает, как сбор 86 показаний датчика 26А (один из 14 датчиков давления на сенсорном вале 926 в показанном варианте осуществления) будет связан с разными сегментами отслеживания (например, 31 сегментом отслеживания в показанном варианте осуществления, где на Фиг. 10 показаны только сегменты 1004А, 1004В, 1004С и 1004АА) сукна 913. Данные на Фиг. 4А и 4В и 14А-14С смоделированы, и, как сказано ниже, могут быть генерированы валами и сукнами, имеющими разные по отношению друг к другу размеры в отличие от показанных на чертежах. Эти смоделированные данные хорошо работают, и сегменты отслеживания перемещаются на один сегмент при каждом обороте сенсорного вала. Реальные данные могут отличаться от моделируемых, поскольку они могут не относиться к длине сегмента отслеживания и периоду оборота сенсорного вала. Поэтому при сборе реальных данных могут случаться пропуски (при последовательных показаниях от непоследовательных сегментов отслеживания) и повторы (при последовательных показаниях от того же сегмента отслеживания). В результате, данные с сегментов отслеживания получают не по порядку. Однако, как более подробно сказано в патентной заявке США №14/268,672 с названием СПОСОБ И СИСТЕМА, ОТНОСЯЩИЕСЯ К СЕНСОРНОМУ ВАЛУ И СОПРЯЖЕННОМУ ВАЛУ, ДЛЯ СБОРА ДАННЫХ ПО ВАЛАМ, поданной 2 мая 2014 г., которая включена путем ссылки, если сбор данных выполняют в течение достаточного времени, маловероятно, что любые сегменты отслеживания не будут иметь соответствующих отслеживаемых данных, даже при неупорядоченном получении данных с каждого сегмента отслеживания. Также как и на Фиг. 4А и 4В, левый столбец 402А указывает последовательный номер, присвоенный показанию датчика, и следующий столбец 404А содержит необработанное значение показания давления в зоне контакта, когда датчик давления 26А входит в область зоны контакта 1201, образованной сенсорным валом 926 и сопряженным валом 942А. Как сказано выше, каждое значение показания давления в столбце 404А может быть синхронизировано по времени с периодом оборота сопряженного вала 942А путем связывания такого значения с одним из 22 окружных сегментов, смотрите столбец 406А, сопряженного вала 942А, который находился в области зоны контакта 1201, при получении такого показания давления. Помимо этого, каждое значение показания давления в столбце 404А также может быть синхронизировано по времени с периодом оборота сукна 913 путем связывания этого значения с одним из 31 сегмента отслеживания, смотрите столбец 1402, сукна 913, который находился в области зоны контакта 1201 при получении такого показания давления.
Подобно сопряженному валу 11, разделенному на осевые сегменты, соответствующие разным местам расположения датчиков 26 на сенсорном вале 10, сукно 913 также может быть разделено на сегменты в поперечном направлении машины (или осевые сегменты), как сказано выше. На Фиг. 11 показано сукно 913 в отношении к сенсорному валу 926 в соответствии с принципами настоящего изобретения. В частности, Фиг. 11 представляет перспективный вид из-под сенсорного вала 926 вверх к сукну 913. Сукно 913 имеет ширину W2, которая по существу равна ширине W1 полотна материала 904, и обе ширины обычно меньше длины L сенсорного вала 926. Таким образом, полотно материала 904 и сукно 913, или каждое из них, могут быть разделены на несколько осевых сегментов 1102, каждый из которых соответствует одному из мест расположения датчиков на сенсорном вале 926, например, на 14 осевых сегментов в показанном варианте осуществления. Соответственно, матрицы "отсчетов", "сумм" и "средних значений", подобные показанным на Фиг. 6-8, могут быть построены для данных с Фиг. 14A-14С, но расположены синхронизированными по времени с периодом сукна 913. В описанном выше примере каждая такая матрица будет иметь (31×14) или 434 ячейки.
В примерах постов на Фиг. 9 и как сказано выше, не каждый пост 908, 910, 912 с мокрым сукном имеет прессовую часть 916, 920, 924, включающую сенсорный вал. На Фиг. 12А показан пост 912 с мокрым сукном, включающий прессовую часть 924 с сенсорным валом 926, который расположен после поста 910 с мокрым сукном, не включающего прессовую часть с сенсорным валом в соответствии с принципами настоящего изобретения.
На Фиг. 12А сенсорный вал 926 связан с областью зоны контакта 1201 прессовой части 924, тогда как прессовая часть 920 поста 910 с мокрым сукном необязательно включает сенсорный вал. Однако сукно 911 поста 910 с мокрым сукном также петлеобразно вращается как бесконечная полоса подобно сукну 913 с Фиг. 10. Соответственно, сукно 911 имеет постоянный период оборота по кругу. Таким образом, каждая из частей сукна 911 периодически контактирует с некоторым участком полотна материала 904 перед областью зоны контакта 1201, даже если само сукно 911 не проходит через область зоны контакта 1201.
На Фиг. 12А показана часть 1207 сукна 911 (имеющая соответствующие осевые и окружные координаты на сукне 911), которая периодически контактирует с полотном материала 904, когда последнее проходит через область зоны контакта 1203 прессовой части 920. Участки 1206, 1208, 1210 и 1214 (каждый из которых имеет соответствующие осевые и окружные координаты на полотне материала 904), расположенные на равном расстоянии d в окружном направлении полотна материала 904, которые находились в области зоны контакта 1203 одновременно с частью 1207 сукна 911 показаны на Фиг. 12А, т.е., в показанном варианте осуществления часть 1207 сукна входит в контакте участками 1206, 1208, 1210 и 1214 полотна материала в разное время при нахождении в зоне контакта 1203. Когда участки 1206, 1208, 1210 и 1214 полотна материала проходят через область зоны контакта 1201 последующего поста 912 с сукном, на показания давления сенсорного вала 926 на последующем посту 912 может влиять воздействие, которое часть 1207 сукна оказывает на участки 1206, 1208, 1210 и 1214 при контакте с ними в предыдущей зоне контакта 1203. Как сказано выше, состояние сукна 911, когда оно прижимается к полотну материала 904, может влиять, например, на количество влаги, отбираемой из участка контакта полотна материала 904, или на другие характеристики полотна материала 904. Таким образом, некоторые участки полотна материала 904 могут иметь больше или меньше влаги относительно друг друга и давать более высокие или более низкие показания давления при прохождении через область зоны контакта 1201.
Пост 910 с сукном может иметь период оборота, который может быть разделен на несколько временных сегментов отслеживания периода оборота бесконечной полосы по кругу четырех валов 941. Кроме того, сукно 911 может быть разделено на несколько физических окружных сегментов отслеживания на бесконечной полосе. В показанном варианте осуществления сукно 911 включает 37 физических окружных сегментов, из которых на Фиг. 12А показаны только четыре сегмента 1202А, 1202В, 1202С, 1202G. Эти 37 физических сегментов могут быть, например, отдельными окружными сегментами, каждый из которых имеет указательное значение относительно фиксированного контрольного положения 1205 на сукне 911. Как сказано ниже, конкретный временной сегмент отслеживания, например, №5, может не соответствовать физическому окружному сегменту, имеющему такое же указательное значение.
Возвращаясь к Фиг. 14А-14С, каждое из моделированных необработанных показаний давления из области зоны контакта 1201, которые показаны в столбце 404А, может быть связано с конкретным временным сегментом отслеживания периода оборота сукна 911. Эти временные сегменты отслеживания затем также могут быть соотнесены с конкретными физическими окружными сегментами сукна 911. Таким образом, таблица на Фиг. 14А-14С также показывает, как сбор 86 показаний датчиков с датчика 26А (один из 14 датчиков давления на сенсорном вале 926) будет связан с временными сегментами отслеживания, указанными в столбце 1404, которые, в свою очередь, могут быть соотнесены с физическими окружными сегментами отслеживания (например, 37 физическими сегментами отслеживания, из которых на Фиг. 12А показаны только сегменты 1202А, 1202В, 1202С, 1202G) сукна 911. Как сказано выше, левый столбец 402А указывает последовательный номер, присвоенный показанию датчика, и следующий столбец 404А указывает моделированное необработанное показание давления, полученное в области зоны контакта 1201 датчиком 26А на сенсорном вале 926. Каждое такое показание давления будет иметь значение, относящееся к участкам полотна материала 904, прошедшим через зону контакта 1201. В качестве примера, смотрите Фиг. 12А, где часть 1207 сукна 911 расположена в окружном сегменте 1202G сукна 911, причем сегмент 1202G может определять физический окружной сегмент №7 в месте по оси, которое совмещено по оси с датчиком давления 26А на сенсорном вале 926 после зоны контакта 1201. Часть 1207 сукна может быть повреждена, так что она не будет удалять столько же влаги из участка полотна материала 904, с которым она контактирует, сколько другие части сукна, которые удаляют повышенное количество влаги из участков полотна материала, с которыми они контактируют. Следовательно, поскольку часть 1207 удаляет меньше влаги из соответствующего участка полотна материала, с которым она контактирует, то этот участок полотна материала покажет увеличение давления в области зоны контакта 1201, например, приблизительно 2 фунта на кв. дюйм, по сравнении, с нулевым увеличением на всех остальных участках полотна материала.
Синхронизация по времени значений в столбце 404А с периодом оборота сукна 911 может быть выполнена путем связывания этих значений давления с одним из 37 временных сегментов отслеживания периода оборота сукна 911, которые соответствуют времени получения показаний давления.
В качестве примера, контрольное положение 1205 на сукне 911 может совершить 1 полный оборот вокруг валов 941 за такое же время, за которое сенсорный вал 926 в последующей зоне контакта 1201 совершит 37 оборотов. Таким образом, сукно 911 перемещается на длину одного из физических сегментов отслеживания (например, 1202А) за каждый оборот сенсорного вала 926. В качестве примера и как сказано выше, часть 1207 сукна 911 расположена в окружном сегменте 1202G сукна 911, причем сегмент 1202G может определять физический окружной сегмент №7 в месте, которое совмещено в осевом направлении с датчиком давления 26А на сенсорном вале 926 в последующей зоне контакта 1201.
Таким образом, генератор сигналов 900В периодически генерирует опорный сигнал времени, когда контрольное положение 1205 сукна 911 находится рядом с генератором сигналов 900 В. Это опорный сигнал, по которому можно вычислить временной сегмент отслеживания периода оборота сукна 911, когда датчик 26А на сенсорном вале 926 проходит через область зоны контакта 1201. В качестве примера, когда датчик давления 26А сенсорного вала 926 ощутит и генерирует показание давления, процессор 903 определит прошедшее время приращениями по 1/37 с момента последнего начального сигнала, генерированного генератором сигналов 900В. Если показание давления было генерировано датчиком 26А сенсорного вала 926 через 25 (по 1/37) приращений времени с момента генерации последнего опорного сигнала, это будет соответствовать 25/37 от полного периода оборота сукна 911. Таким образом, показание давления, полученное в зоне контакта 1201, может быть связано с временным сегментом отслеживания №25. Таким образом, период оборота сукна может включать m временных сегментов отслеживания, каждый из которых имеет соответствующее уникальное указательное значение x в интервале 1, 2, …, m (например, m=37).
Подобно тому, как расположены или сохранены данные на Фиг. 4А и 4В и Фиг. 14А-14С в синхронизации по времени с периодом оборота сопряженного вала 942А и сукна 913, показания датчиков из области зоны контакта 1201 также могут быть расположены или сохранены в синхронизации по времени с периодом оборота сукна 911.
Для сукна 911 номера временных сегментов отслеживания (например, временной сегмент отслеживания №25) относятся к логическим сегментам периода оборота сукна 911, которые появились с момента генерации опорного сигнала генератором сигналов 900В и до получения и генерации показания давления датчиком давления 26А сенсорного вала 926. Однако эти исходные номера временных сегментов отслеживания не обязательно соответствуют физическому окружному сегменту на сукне 911, отмеренному от контрольного места 1205. Другими словами, участок полотна материала, находящийся в области зоны контакта 1201 одновременно с датчиком 26А, может войти туда в 25-м временном сегменте периода оборота сукна 911, но этот участок полотна материала 904 необязательно будет отжат в области 1203 зоны контакта физическим 25-м окружным сегментом сукна 911, который отмерен от контрольного места 1205. Существует задержка между сукном 911 и зоной контакта 1203, влияющая на свойства полотна и отслеживание такого изменения в области зоны контакта 1201. Говоря в общем, изменения в сукне 911 во время его нахождения в зоне контакта 1203 могут влиять на количество влаги на участке полотна материала 904В зоне контакта 1203, а также на толщину полотна. Такие различия во влажности и толщине могут влиять на значения давления, получаемые в зоне контакта 1201, когда участки полотна материала 904 с разными количествами влаги входят в область зоны контакта 1201 одновременно с датчиком 26А. Таким образом, изменения в сукне 911 влияют на значения давления, полученные в области зоны контакта 1201.
Помимо описанного выше способа идентификации разных сегментов отслеживания также могут быть применены альтернативные способы. Например, вращающееся сукно 911 может включать многочисленные равномерно расположенные метки, которые могут быть детектированы (например, оптическими средствами), когда каждая такая метка проходит место расположения датчика. Метки будут функционировать так, чтобы делить сукно 911 (или 913) на сегменты, и счетчик или подобная ему схема будет увеличивать отсчет каждый раз, когда детектирована метка, чтобы собранные данные можно было связать с одним из сегментов сукна 911. Опорная метка может отличаться от других меток, чтобы когда датчик детектирует опорную метку, схема счетчика сбрасывалась в исходное состояние и начинала отсчет с начального значения (например, "0" или "1"). В качестве примера, каждая из равномерно распределенных меток может быть одной галочкой, галочкой определенной ширины или галочкой определенного цвета. Опорная метка может быть двойной галочкой, более толстой (или более тонкой) галочкой или галочкой уникального цвета. Если использовать только что описанные способы деления сукна 911 на сегменты, то не нужно будет точно измерять время, прошедшее с момента генерации самого последнего опорного сигнала времени, который генерируется при каждом обороте сукна 911. Детектируемые метки можно детектировать, например, оптическими средствами, магнитными средствами, с использованием инфракрасного излучения, с использованием звуковых волн, с использованием рентгеновского излучения или по радиоактивному излучению.
На Фиг. 12В показан пример способа соотнесения временного сегмента отслеживания сукна 911 с соответствующим физическим окружным сегментом отслеживания на сукне 911. Сукна, такие как 911 и 913, могут иметь разную длину или окружность, например, от 50 до 300 футов. В одном примере варианта осуществления диаметр сенсорного вала 926 составляет 2 фута при окружности приблизительно 6,28 футов. Сукно 911 в данном примере имеет 37 физических окружных сегментов, каждый из которых равен по длине окружности сенсорного вала 926. Таким образом, сукно 911 имеет в длину немногим больше 232 футов, LF. Сукно 911 также вращается как бесконечная полоса вокруг валов 941 с периодом оборота ρ. В простом примере область зоны контакта 1201 расположена на некотором расстоянии от области зоны контакта 1203, которое равно целочисленному кратному длины сукна LF. Как показано на Фиг. 12В, когда контрольное место 1205 находится в таком положении, что генерируется новый опорный сигнал времени, полотна материала 904 касается какой-то сегмент (например, сегмент №24). В показанном варианте осуществления, поскольку сегмент №24 является единственным сегментом сукна в зоне контакта 1203 каждый раз, когда генерируется новый опорный сигнал времени, он назван "контрольный сегмент касания сукна". Также на полотне материала 904 показаны два других участка 1260, 1262, которые ранее находились в области зоны контакта 1203 одновременно с "контрольным сегментом касания сукна" №24. То есть, участок 1260 материала полотна находился в области зоны контакта одновременно с "контрольным сегментом касания сукна" №24 во время одного предшествующего оборота сукна 911, и участок 1262 полотна материала находился в области зоны контакта одновременно с "контрольным сегментом касания сукна" №24 во время двух предшествующих оборотов сукна 911.
Что касается участка 1260 полотна материала, то после нахождения участка 1260 в зоне контакта 1203, соседний участок 1272 полотна материала входит в область зоны контакта 1203 одновременно с окружным сегментом №25 сукна 911 и рядом с этим участком 1272 расположен участок 1270 полотна материала, который находился в области зоны контакта 1203 одновременно с окружным сегментом №26 сукна 911. Перед участком 1260 полотна материала расположен соседний участок 1274 полотна материала, который находился в области зоны контакта 1203 одновременно с окружным сегментом №23 сукна 911, и участок полотна материала 1276, который находился в области зоны контакта 1203 одновременно с окружным сегментом №22 сукна 911. Каждый из участков 1260, 1270, 1272, 1274, 1276 полотна материала имеет длину равную 1/37 от длины LF сукна 911, соответствуя периоду времени продолжительностью ρ/37.
На Фиг. 12В на сенсорном вале 926 участок 1262 полотна материала 904 показан в области зоны контакта 1201 с датчиком 26А. На основании опорного сигнала генератора 900В, который в показанном варианте осуществления всегда генерируется одновременно с контрольным сегментом касания сукна №24 в зоне контакта 1203, показание датчика 26А на сенсорном вале 926 получают в первый период времени сегмента отслеживания (например, (0≤t<1/37*ρ)), который начинается одновременно с генерацией опорного сигнала генератором 900В, и значение "t" представляет величину времени с момента генерации этого опорного сигнала. Однако если бы датчик 26А находился в положении входа в зону контакта 1201 во время следующего временного сегмента периода оборота сукна 911, х=2, то контрольное место 1205 сдвинулось бы на расстояние, равное одному окружному сегменту сукна 911, и полотно материала 904 переместилось бы вперед по существу на такое же расстояние, чтобы участок непосредственно за участком 1262 (и аналогичный участку 1272) вошел бы в область зоны контакта 1201. Соответственно, если показание получено во время второго временного сегмента отслеживания (например, (1/37*ρ≤t<2/37*ρ)), то участок полотна материала 904, который находится в области зоны контакта 1201 ранее также находился в области зоны контакта 1203 одновременно с окружным сегментом отслеживания №25 сукна 911.
Соответственно, каждый временной сегмент отслеживания можно легко соотнести с физическим окружным сегментом отслеживания сукна 911. Если показание датчика 26А на сенсорном вале 926 получают в интервале между (х-1/37*ρ≤t<x/37*ρ), где "x" - указательное значение временного сегмента отслеживания периода оборота сукна 91, измеренного с момента генерации последнего опорного сигнала генератором 900В, причем временной сегмент отслеживания находится в области зоны контакта 1201 одновременно с датчиком 26А, то участок полотна материала 904 в области зоны контакта 1201 также ранее находился в области зоны контакта 1203 одновременно с физическим окружным сегментом сукна 911, имеющим указательное значение q, где q = ((номер опорного сегмента касания сукна (№24 в показанном варианте осуществления)) + (x-1)), и измеренным от контрольного места 1205. Это указательное значение конечно будет сброшено для того, чтобы снова начаться с "1", когда оно дойдет до "37", т.е., числа физических окружных сегментов.
На Фиг. 12С показана небольшая модификация ситуации с Фиг. 12В, в которой область зоны контакта 1201 находится, для примера, на некотором расстоянии от области зоны контакта 1203, которое не является целочисленным кратным длины LF сукна 911. По сравнению с ситуацией на Фиг. 12В, расстояние между областью зоны контакта 1201 и областью зоны контакта 1203 на Фиг. 12С имеет дополнительную протяженность y. В показанном варианте осуществления, величина времени, за которую полотно материала 904 проходит это дополнительное расстояние y, равна (10/37*ρ). Показание датчика из области зоны контакта 1201, получаемое во время первого временного сегмента отслеживания (0≤t<1/37*ρ), будет относиться к участку полотна материала 904, который ранее также находился в области зоны контакта 1203 одновременно с окружным сегментом №14 (например, за 10 временных сегментов до "контрольного сегмента касания сукна" (т.е., №24 в вариантах осуществления на Фиг. 12В и 12С) в области зоны контакта 1203. Поэтому, в более общем виде:
a) если расстояние между областью зоны контакта 1201 и областью зоны контакта 1203 больше на протяженность y чем целочисленное кратное длины сукна 911 (где единицами измерения для y являются физические окружные сегменты отслеживания), и
b) если показание датчика получено в момент времени t, где (х-1/37*ρ≤t<х/37*ρ), то участок полотна материала 904В области зоны контакта 1201 также ранее находился в области зоны контакта 1203 одновременно с физическим окружным сегментом отслеживания сукна 911, проиндексированным указательным значением q, где q = ((номер контрольного сегмента касания сукна) + (х-1) - y), измеренным от контрольного места 1205. Таким образом, данные (например, суммы, отсчеты, средние значения), разделенные по 37 временным сегментам отслеживания, также могут быть применены к 37 окружным сегментам отслеживания.
Таким образом, сукно 911, или, говоря в общем, бесконечная полоса, может включать m (например, m=37) физических окружных сегментов отслеживания относительно контрольного места на бесконечной полосе, каждый из которых имеет соответствующее уникальное указательное значение q в интервале 1, 2, …, m, причем каждый из m временных сегментов отслеживания может быть связан с соответствующим одним из m физических окружных сегментов отслеживания. Как сказано выше, указательное значение x конкретного временного сегмента отслеживания можно вычислить независимо от вычисления указательного значения q соответствующего окружного сегмента отслеживания (т.е., вычисление x временного сегмента отслеживания не зависит от первоначального определения q соответствующего физического окружного сегмента).
Дополнительно, опять со ссылкой на Фиг. 12В и уравнение, выше, каждый физический окружной сегмент отслеживания №1-№37 сукна 911 контактирует с полотном материала 904 в расположенном ранее месте от области зоны контакта 1201; и указательное значение q каждого физического окружного сегмента отслеживания №1-№37 может быть вычислено из а) расстояния между областью зоны контакта 1201 и таким расположенным ранее местом (например, зоной контакта 1203) и b) указательного значения x соответствующего временного сегмента отслеживания. Более конкретно, один окружной сегмент отслеживания контактирует с полотном материала 904 в таком расположенном ранее месте по существу одновременно с генерацией сигнала срабатывания генератором сигналов и может считаться контрольным сегментом касания сукна, и указательное значение q каждого окружного сегмента отслеживания (например, №1-№37) может быть вычислено на основании а) расстояния между областью зоны контакта 1201 и расположенным ранее местом (например, зоной контакта 1203), b) указательного значения одного окружного сегмента отслеживания (например, №24, контрольный сегмент касания сукна) и с) указательного значения x соответствующего временного сегмента отслеживания. В каждом из двух описанных сценариев вычисления указательного значения, q, физического окружного сегмента на основании указательного значения, x, временного сегмента отслеживания, для вычисления использовано расстояние между областью зоны контакта 1201 и расположенным ранее местом (например, зоной контакта 1203). Как сказано выше, может быть предпочтительным считать расстояние между областью зоны контакта 1201 и расположенным ранее местом (например, зоной контакта 1203) целочисленным кратным длины LF сукна 911 плюс какая-то дополнительная протяженность или расстояние y, где единицами измерения у являются физические окружные сегменты отслеживания.
Помимо этого, согласно описанному выше способу идентификации сегментов отслеживания по времени, также могут быть использованы альтернативные способы. На Фиг. 12D, 12Е и 12F показан альтернативный пост 912А с мокрым сукном 913А, проходящим вокруг четырех валов 1250 в направлении, показанном стрелкой 1270. На этом альтернативном посту 912А с мокрым сукном для определения сегментов отслеживания использованы признаки сукна 913А. Например, вращающееся сукно 913А может включать множество меток (например, оптических), расположенных на равном расстоянии друг от друга и учитываемых, когда каждая такая метка проходит место расположения датчика или детектора 1254. Каждый раз, когда одна из меток проходит и детектируется датчиком или детектором 1254, обнаружение такой метки рассматривается как "событие". Таким образом, детектор 1254 также может включать схему счетчика, которая сообщается с процессором 903В и подсчитывает или отслеживает происходящие события. Метками также могут служить металлические провода или нити, которые могут быть обнаружены магнитами или другими переключающими устройствами. Метки также делят сукно 913А (или сукно 911) на сегменты, и счетчик или ему подобная схема будет увеличивать отсчет на единицу каждый раз, когда детектирована метка (например, событие), чтобы можно было связать полученные данные с одним из сегментов сукна 913А. Также можно расположить метки не на равном расстоянии друг от друга.
На Фиг. 12D сукно 913А может иметь 37 физических окружных сегментов 1260А-1260АK, из которых на Фиг. 12D показаны сегменты 1260А, 1260Х, 1260Y, 1260Z, 1260AJ и 1260АK. Каждый физических окружной сегмент 1260 отделяет метка 1264 (например, на Фиг. 12D показаны метки 1264А, 1264Х, 1264Y, 1264Z, 1264AJ). Контрольная метка 1262 может отличаться от всех остальных меток 1264А-1264AJ для того, чтобы при обнаружении детектором 1254 контрольной метки 1262 схема счетчика 1254 сбрасывалась и начинала отсчет с начального значения или "стартового отсчета" (например, "0" или "1"). Альтернативно, контрольные метки могут быть уникальными и конкретно отмечать определенные положения на сукне.
На посту 912А с мокрым сукном один из валов 1250 формирует зону контакта 1252 с сенсорным валом 926, который снабжен беспроводным устройством 40А для сообщения с процессором 903В и массивом датчиков 26А (например, 14 датчиков), расположенных в осевом направлении на сенсорном вале 926. Когда датчик 26А в одном из осевых положений на сенсорном вале 926 входит в некоторую область зоны контакта 1252 и получает показание давления, то это значение давления может быть синхронизировано по отсчету с оборотом мокрого сукна 913А путем связывания показаний датчиков в этом осевом положении с текущим значением счетчика 1254. Когда метки 1264 расположены на равном расстоянии друг от друга по окружности, значение давления также может считаться синхронизированным по времени с оборотом сукна 913А посредством связывания показания датчика в этом осевом положении с текущим значением счетчика 1254.
Каждый раз, когда отличительная контрольная метка 1262 обнаруживается детектором 1254, может быть генерирован начальный опорный сигнал, который связан с каждым оборотом мокрого сукна 913А. Начальный опорный сигнал может, например, сбрасывать значение счетчика 1254 на начальный отсчет, например, "1". Когда показание давления получено датчиком 26А в области зоны контакта 1252, число отсчетов меток или число событий, обнаруженное детектором/счетчиком 1254 с момента самого последнего начального опорного сигнала или исходного отсчета, указывает величину, на которую мокрое сукно 913А повернулось по кругу в интервале между сбросом счетчика 1254 и получением показания давления в области зоны контакта 1252. Соответственно, каждый отсчет (например, "1", "2", …"37") может быть связан с одним из множества основанных на отсчете сегментов отслеживания, причем каждый основанный на отсчете сегмент отслеживания связан с некоторым физическим окружным сегментом 1260А-1260АK мокрого сукна 913А в одном варианте осуществления настоящего изобретения. В показанном варианте осуществления каждый основанный на отсчете сегмент отслеживания равен отсчету или значению счетчика. Если метки 1264 расположены на равном расстоянии друг от друга, то основанные на отсчете сегменты отслеживания могут соответствовать временным сегментам отслеживания периода оборота мокрого сукна 913А или физическим окружным сегментам мокрого сукна 913А.
Подобно способам, описанным выше, которые включают синхронизацию по времени показаний датчиков для каждого расположенного в осевом направлении датчика 26А с одним из 37 возможных временных сегментов отслеживания, связывание каждого из таких показаний датчиков с одним из 37 основанных на отсчете сегментов отслеживания, когда метки 1264 расположены на равном расстоянии друг от друга, также синхронизирует по времени данные по давлению с оборотом мокрого сукна 913А.
В примере варианта осуществления с Фиг. 12D мокрое сукно 913А проходит по полотну материала 904 в зоне контакта 1252, образованном с сенсорным валом 926. В таком варианте осуществления значение детектора/счетчика 1254, когда соответствующий физический окружной сегмент (например, 1260А-1260АK) мокрого сукна 913 находится в области зоны контакта 1252, связано с одним из основанных на отсчете сегментов отслеживания. Как сказано выше, каждый основанный на отсчете сегмент отслеживания соответствует одному из физических окружных сегментов 1260А-1260АK мокрого сукна 913А. Следовательно, когда показание датчика получено от одного из разнесенных в осевом направлении датчиков, процессор 903В связывает это показание датчика с текущим значением счетчика 1254, связывает отсчет на счетчике 1254 с соответствующим основанным на отсчете сегментом отслеживания и сохраняет это показание датчика с сегментом отслеживания, соответствующим отсчету, генерированному при получении показания датчика.
На Фиг. 12Е показано сукно 913А с Фиг. 12D после его поворота в другое положение, при этом датчик 26А генерирует сигнал давления в зоне контакта 1252. В частности, сукно 913А повернулось на такую величину, что метки 1262, 1264А, 1264В и 1264С детектированы и учтены детектором/счетчиком 1254. Таким образом, если отсчет меток начинается с "1", когда детектирована отличительная метка 1262, примером отсчета для положения сукна 913А с Фиг. 12Е будет "4" при получении показания с датчика 26А. Это значение отсчета будет соответствовать одному из 37 (например) сегментов отслеживания, с которыми будет связано каждое из показаний датчиков, и каждый такой сегмент отслеживания (или значение отсчета) будет соответствовать одному из физических окружных сегментов 1260А-1260АK мокрого сукна 913А. Как показано на Фиг. 12Е, соответствующий этому значению отсчета "4" физический окружной сегмент 1260F сукна 913А находится в области зоны контакта 1252. Соответственно, множество полученных показаний давления в области зоны контакта 1252, связанных с сегментом отслеживания или показанием отсчета "4", может быть связано с физическим окружным сегментом 1260F сукна 913А. Продолжая на примере с Фиг. 12Е, когда сукно повернется так, что метка 1264D будет детектирована и учтена, сегмент отслеживания или значение отсчета будет равно "5" и будет соответствовать показаниям давления, полученным, когда физический окружной сегмент 1260G находится в области зоны контакта 1252.
Вариант осуществления с Фиг. 12А также может быть модифицирован так, чтобы сукно 911 включало метки, и пост 910 с мокрым сукном включал счетчик/детектор вместо генератора сигналов 900В на основе времени. Показания давления, полученные в области зоны контакта 1201, могут быть синхронизированы по отсчету с оборотом мокрого сукна 911 на основании значения отсчета, а не прошедшего времени. Таким образом, определение основанного на отсчете сегмента отслеживания и синхронизация по отсчету, описанные в отношении Фиг. 12D, могут быть применены к сукну, которое проходит через зону контакта, где будут получены значения давления, или к сукну, которое находится перед зоной контакта, где получают показания давления.
На Фиг. 12F показана часть мокрого сукна 913А, которое проходит вокруг по петлеобразной траектории в направлении, показанном стрелкой 1270. Часть сукна 913А на Фиг. 12F имеет отличительную контрольную метку 1262 и четыре других, расположенных рядом, метки 1264А, 1264В, 1264AJ и 1274AI, которые расположены равномерно относительно окружных сегментов 1260А, 1260В, 1260AJ и 1260АK мокрого сукна 913А. В качестве примера, каждая такая метка может иметь форму галочки (например, 1264А, 1264В, 1264AI и 1274AJ), галочки определенной ширины или метки определенного цвета. Отличительная контрольная метка 1262 может быть двойной галочкой, более толстой (или более тонкой) галочкой или меткой уникального цвета. Такие метки также можно использовать для кодирования информации по положению (например, номерами от 1 до 37) каждого сегмента. Если использовать описанные выше способы деления сукна 913А (или 911), то не нужно будет точно измерять время, прошедшее с момента генерации самого последнего опорного сигнала времени, который генерируется при каждом обороте сукна 913А; в место этого можно использовать детектирование и отсчет меток (например, 1264А-1264AJ) от отличительной контрольной метки 1262, чтобы определить множество основанных на отсчете сегментов отслеживания.
Положение меток 1262, 1264А, 1264В, 1264AJ и 1264АK на Фиг. 12F представлено просто для примера. Они могут быть расположены по всей ширине сукна 913А в осевом направлении, рядом с одним или обоими краями сукна 913А или в середине сукна 913А. Их располагают так, чтобы их можно было детектировать детектором/счетчиком 1254, когда сукно 913А проходит рядом с детектором/счетчиком 1254.
Средний специалист в данной области техники поймет, что идентифицируемые метки или другие типы маркировки могут быть выполнены разными способами, но без нарушения объема настоящего изобретения. Например, каждая метка может быть кодирована, чтобы ее можно быть определить как таковую. Поэтому соответствующий датчик не будет "подсчитывать" метки, а будет просто идентифицировать, какую метку в настоящее время проходит датчик. Таким образом, каждая метка может быть связана с некоторым значением, возможно уникальным, которое может быть отслежено между моментом генерации самого последнего начального опорного сигнала и входом датчика (например, 26А) в некоторую область зоны контакта, где будет получено показание давления или другое показание. Соответственно, один из множества сегментов отслеживания, связанных с бесконечной полосой, можно будет идентифицировать на основе такого значения.
Кроме расположения на поверхности сукна, метки в форме галочки или другие метки или отверстия могут быть расположены на диске, соединенном с вращающимся валом, или на самом вале, входящим в число нескольких вращающихся компонентов, которые помогают перемещать сукно по его бесконечной петле. Такое расположение можно использовать при наличии вращающегося кодирующего устройства, которое позволяет идентифицировать сегменты отслеживания сукна или другой бесконечной полосы. В качестве примера, кодирующее устройство такого типа для вала может давать значение, которое соответствует отсчету числа меток или отверстий, детектированных между моментом генерации самого последнего начального опорного сигнала и входом датчика (например, 26А) в некоторую область зоны контакта, где получают показание давления или другое показание. Соответственно, на основании такого значения можно идентифицировать один из множества сегментов отслеживания, связанных с бесконечной полосой.
В дополнение к вышеприведенным примерам, каждый сегмент отслеживания бесконечной полосы, которым может быть временной сегмент периода оборота полосы или физический окружной сегмент полосы, также может соответствовать значению, получаемому между генерацией самого последнего начального опорного сигнала и входом датчика (например, 26А) в некоторую область зоны контакта, где получают показание давления или другое показание. Каждый такой сегмент отслеживания может соответствовать определенному значению, например, указательному номеру сегмента отслеживании, отмеренному от опорного сигнала, такого как временной опорный сигнал, или контрольного места или положения полосы.
Возвращаясь к сукну 911 на Фиг. 12А, сукно 911 может быть разделено на сегменты в поперечном направлении (или осевые), подобно разделению сукна 913 на осевые сегменты, соответствующие местам расположения датчиков 26А на сенсорном вале 926. Таким образом, сукно 911 может быть разделено на множество осевых сегментов, каждый из которых соответствует одному месту расположения датчика на сенсорном вале 926, и для каждого осевого сегмента могут быть получены данные, подобные данным на Фиг. 14А-14С. Соответственно, могут быть построены матрицы "отсчетов", "сумм" и "средних значений", которые показаны на Фиг. 6-8 с данными, подобными показанным на Фиг. 14А-14С, для каждого осевого сегмента, но синхронизированными по времени с периодом оборота сукна 911. В примере, приведенном выше, каждая такая матрица будет иметь (37×14) или 518 ячеек, поскольку сукно 911 или, говоря в общем, бесконечная полоса включает n осевых сегментов, имеющих указательные значения: 1, 2, …, n (например, n=14) и период оборота сукна включает m временных сегментов отслеживания, каждый из которых имеет соответствующее уникальное указательное значение x в интервале 1, 2, …, m (например, m=37), что создает (n умножить на m) уникальных пермутаций, идентифицируемых двухэлементной группой, включающей указательное значение осевого сегмента и указательное значение временного сегмента отслеживания. Поэтому, как сказано выше, для множества соответствующих сигналов датчиков и для одной или нескольких из возможных (n умножить на m) пермутаций может быть вычислена каждая ячейка матрицы, которая представляет среднее значений всего множества соответствующих сигналов датчиков, связанных с осевым сегментом и временным сегментом отслеживания, которые совпадают с одной или несколькими пермутациями.
Показания давления в столбце 404А на Фиг. 14А-14С включают только 100 показаний от одного датчика 26А. Однако, если получить данные по 1000, 2000 или даже 5000 показаний датчиков от каждого из датчиков на сенсорном вале, то синхронизация данных по времени может прояснить влияние, которое разные посты, например, посты 908, 910 и 912 с мокрым сукном в технологической линии/системе с Фиг. 9, могут оказывать на показания давления. Значения в столбце 404А соответствуют разным последовательным показаниям датчиков, которые пронумерованы в столбце 402А. Однако в зависимости оттого, как эти значения показаний давления связаны с периодически повторяющимися сегментами отслеживания, могут стать понятными модели показаний давления.
Как показано элементом 1412 в столбце 406А, может быть 22 сегмента отслеживания сопряженного вала, так что каждое показание давления (из столбца 404А) связано с одним из этих сегментов отслеживания. Как сказано выше в отношении матриц с Фиг. 6-8, каждое показание датчика в столбце 404А может быть связано только с одним осевым положением (или положением одного датчика, генерировавшего эти показания давления) и с любым из сегментов отслеживания (например, 1-22) контролируемого компонента в процессе/системе с Фиг. 9. Ниже в описании сделано допущение, что примером осевого сегмента является "осевой сегмент №1". Все показания давления в столбце 404А, которые связаны с сегментом отслеживания 1 сопряженного вала, суммируются. Затем число таких сегментов может быть разделено на такую сумму, чтобы получить среднее показание давления для сегмента отслеживания 1. Подобное среднее значение также может быть вычислено для каждого из 21 сегмента отслеживания сопряженного вала. Подобные средние значения могут быть вычислены для каждого из 21 сегмента отслеживания сопряженный вал, который соответствует одному из остальных осевых сегментов, т.е., осевого сегмента №2 - осевого сегмента №14. Таким образом, можно построить матрицу средних значений давления, такую же как описана в отношении Фиг. 8, для сопряженного вала 942А.
На Фиг. 15А показана матрица средних значений давления для сопряженного вала 942А, построенная путем расширения данных моделирования с Фиг. 14А-14С до 5000 показаний давления. В столбце 1502 представлены сегменты отслеживания сопряженного вала 942А, и каждая строка представляет один из этих 22 сегментов отслеживания. Каждый столбец 1506 представляет одно из осевых положений датчиков 26 (например, 14 осевых положений). Расширенные данные по показаниям давления в столбце 404А на Фиг. 14А-14С представляют одно конкретное осевое положение, такое как "осевой сегмент 1", и, таким образом, используются для вычисления значения в столбце 1506А матрицы с Фиг. 15А. Значение 1508 в строке 5 матрицы является средним для всех показаний давления столбца 404А, которые связаны с сегментом отслеживания 5 сопряженного вала 942А.
На Фиг. 15В показана матрица средних значений давления для сукна 913, построенная путем расширения данных моделирования с Фиг. 14А-14С до 5000 показаний давления. Столбец 1512 представляет сегменты отслеживания сукна 913, и каждая строка представляет один из 31 сегмента отслеживания. Каждый столбец 1516 представляет одно из осевых положений датчиков 26. Расширенные данные по показаниям давления в столбце 404А на Фиг. 14А-14С представляют одно конкретное осевое положение, такое как "осевой сегмент 1", и, таким образом, используются для вычисления значения в столбце 1516А матрицы с Фиг. 15В. Значение 1518 в строке 27 матрицы является средним для всех показаний давления столбца 404А, которые связаны с сегментом отслеживания 27 сукна 913. В частности, среднее значение в строке 27 значительно больше чем значения в других строках столбца 1516 и может указывать на дефект сукна 913, например, загрязненный участок, который периодически приводит к удалению меньшего количества воды.
На Фиг. 15С показана матрица средних значений давления для сукна 911, построенная путем расширения данных моделирования с Фиг. 14А-14С до 5000 показаний давления. Столбец 1522 представляет временные сегменты отслеживания сукна 911, где каждая строка представляет один из этих 37 сегментов отслеживания. Каждый столбец 1526 представляет одно из осевых положений датчиков 26. Расширенные данные по показаниям давления в столбце 404А на Фиг. 14А-14С представляют одно конкретное осевое положение, такое как "осевой сегмент 1", и, таким образом, используются для вычисления значения в столбце 1526А матрицы на Фиг. 15С. Значение 1528 в строке 25 матрицы является средним для всех показаний давления столбца 404А, которые связаны с временным сегментом отслеживания 25 сукна 911. Временной сегмент отслеживания 25 необязательно соответствует физическому окружному сегменту отслеживания 25 сукна 911, в это время находящему в зоне контакта 1203. Однако, как сказано выше, можно вычислить физический окружной сегмент сукна 911 в зоне контакта 1203, соответствующий временному сегменту отслеживания 25. В частности, среднее значение в строке 25 приблизительно на 2 фунта на кв. дюйм выше чем многие из значений в других строках и может представлять дефект сукну 911, такой как загрязненный участок сукна или более тонкий участок сукна 911, который не удаляет воду с такой же эффективностью как окружающие области сукна 911, т.е. периодически влияет на полотно материала 904.
На Фиг. 16 графически показаны варианты синхронизированного по времени расположения одних и тех же показаний датчиков в соответствии с принципами настоящего изобретения. В частности, формы волны на Фиг. 16 представляют 5000 показаний датчиков, полученных одним датчиком 26А на сенсорном вале 926 и использованных для построения столбцов 1506А, 1516А и 1526А матриц с Фиг. 15А-15С.
Форма волны 1602 имеет указательное значение сегмента отслеживания сопряженного вала в качестве x-значения и соответствующее среднее показание давления из столбца 1506А матрицы с Фиг. 15А для этого указательного значения сегмента в качестве y-значения. Форма волны 1604 имеет указательное значение сегмента отслеживания сукна 913 в качестве x-значения и соответствующее среднее показание давления из столбца 1516А матрицы с Фиг. 15В для этого указательного значения сегмента в качестве y-значения. Форма волны 1608 имеет указательное значение временного сегмента отслеживания сукна 911 в качестве x-значения и соответствующее среднее показание давления из столбца 1526А матрицы с Фиг. 15С для этого указательного значения сегмента в качестве y-значения. Пики 1604 и 1608 форм волны соответствуют значениям 1518 и 1528 с Фиг. 15В и Фиг. 15С.
Как сказано выше, матрицы средних значений давления или соответствующие им формы волны могут быть проанализированы для выявления потенциальных проблем на одном или нескольких постах в технологической линии/системе с Фиг. 9. Форма волны 1602 показывает синусоидальное изменение значения давления, на основании которого сегмент отслеживания сопряженного вала 942А проходит через область зоны контакта 1201 в месте по оси, соответствующем датчику давления 26А, который 26А соответствует осевому сегменту 1. Это может быть вызвано, например, овальностью поперечного сечения сопряженного вала 942А в этом осевом положении вместо круглого поперечного сечения. Форма волны 1604 показывает значительный импульс давления, связанный с сегментом отслеживания №27 сукна 913 в месте по оси, соответствующем датчику давления 26А, по сравнению с другими 30 сегментами отслеживания сукна 913 в этом месте. Форма волны 1608 показывает выявляемый импульс давления, связанный с временным сегментом отслеживания №25 периода оборота сукна 911 в месте по оси, соответствующем датчику давления 26А, по сравнению с другими 36 сегментами отслеживания сукна 911 в том же месте по оси.
На Фиг. 13 сенсорный вал 918 связан с областью зоны контакта 212А прессовой части 916 поста 908 с сукном, которая в данном примере расположена ближе всего к сетке 906. Однако значения давления могут быть получены на других, расположенных далее постах, но также без нарушения объема настоящего изобретения. Подобно сукнам 911 и 913, металлическая сетка 906 вращается как бесконечная полоса по петлеобразной траектории вокруг валов 1302 и 1304. Соответственно, сетка 906 имеет постоянный период оборота по этой петлеобразной траектории. Таким образом, разные части сетки 906 периодически контактируют, каждая, с соответствующими участками полотна материала 904 перед областью зоны контакта 212А, даже если сама сетка 906 не проходит через область зоны контакта 212А. Область зоны контакта 212А образована сенсорным валом 918 и сопряженным валом 940А на посту 908 с мокрым сукном. Сенсорный вал 918 включает беспроводной передатчик 40В (по существу такой же, как беспроводные устройства 40, 40А, упомянутые выше) и массив датчиков, включающий некоторое число разнесенных в осевом направлении датчиков 1302 (по существу таких же, как каждый датчик 26, упомянутый выше), причем только один датчик 1302А расположен в соответствующем осевом месте, показанном на Фиг. 13. Подобно сказанному в отношении Фиг. 5, процессор 903А принимает сигналы от генератора сигналов 900С и беспроводного устройства 40В, чтобы синхронизировать по времени показания датчиков на сенсорном вале 918 с периодическим опорным сигналом времени от генератора сигналов 900С. В примере варианта осуществления на Фиг. 13 показана одна простая металлическая сетка 906; однако с ней могут быть связаны другие элементы, такие как верхняя сетка и/или вертикальная сетчатая часть. Средний специалист в данной области техники поймет, что с сеткой 906 с Фиг. 13 могут быть связаны и другие элементы, такие как дополнительные валы, которые контактируют с внутренней поверхностью сетки 906 для ее равномерного перемещения и предотвращения провисания, и могут быть предусмотрены вакуумные ящики и листы (не показаны) для удаления влаги из массы через сетку 906.
На Фиг. 13 показана часть 1309 сетки 906, имеющая соответствующие координаты по оси и окружности, которая периодически контактирует с полотном материала 904, когда оно проходит по сетке 906. Показанные участки 1310 и 1312 полотна материала контактировали с частью 1309 сетки 906. Когда один из этих участков полотна материала проходит через область зоны контакта 212А, на показание давления на сенсорный вал 918 может влиять то, что сеточная часть 1309 воздействует на полотно материала 904, с которым она контактирует. Подобно объяснению, касающемуся сукон, на состояние сетки 906, которая контактирует с полотном материала 904, может влиять, например, количество влаги, которое может быть удалено из контактного участка полотна материала 904. Таким образом, некоторые участки полотна материала 904 могут содержать больше или меньше влаги относительно друг друга и давать более высокое или более низкое показание давления при прохождении через область зоны контакта 212А. Изменения в полотне материала 904 могут быть вызваны силой тяжести, вакуумом и вакуумным удалением воды из массы на сетке 906. Влияние может быть оказано на массу с водой (влажность) и сухую массу полотна. Загрязнения на сетке 906 могут вызывать изменение положения твердых частиц полотна. Отверстия в изношенных областях сетки 906 могут приводить к потере твердых частиц полотна на сетке 906, что приведет к появлению более легких участков.
Металлическая сетка 906 может иметь период оборота, который можно разделить на временные сегменты отслеживания таким же образом, что и разделение периода оборота сукна 911 на 37 временных сегментов отслеживания, описанное выше, каждый из которых может быть перенесен на соответствующий физический окружной сегмент отслеживания сукна 911. Таким образом, сегменты отслеживания, относящиеся к сетке 906, могут быть временными сегментами периода оборота бесконечной полосы по кругу или физическими окружными сегментами на бесконечной полосе. Сегменты 1307, показанные на Фиг. 13, могут быть, например, отдельными физическими окружными сегментами, каждый из которых имеет указательное значение относительно фиксированного контрольного положения 1308 на сетке 906.
В качестве примера, контрольное положение 1308 может совершить 1 полный оборот по кругу зато же время, за которое сенсорный вал 918 совершит 43 оборота. Например, если окружность сенсорного вала 918 составляет приблизительно 6 футов, то в данном примере окружность сетки 906 будет составлять приблизительно 258 футов (т.е., 6*43). Используя те же принципы, что и для описания сукна 911 с Фиг. 12А, сетка 906 может быть разделена на 43 сегмента отслеживания. В качестве примера, часть 1309 сетки 906, которая имеет, например, окружной сегмент отслеживания и место в осевом направлении, может вызвать импульс давления в области зоны контакта 212А по сравнению с другими частями сетки 906, если в этом месте есть загрязнения, или падение давления в области зоны контакта 212А по сравнению с другими частями сетки 906, если в этом месте появилось отверстие из-за износа.
Таким образом, генератор сигналов 900С периодически генерирует временной опорный сигнал, когда контрольное положение 1308 сетки 906 находится рядом с генератором сигналов 900С. По этому опорному сигналу можно вычислить временной сегмент отслеживания, когда датчик 1302А проходит через область зоны контакта 212А. В качестве примера, когда любой из участков 1310 или 1312 полотна материала проходит через эту зону контакта 212А и обнаруживается, процессор 903А может определить период времени, прошедший с момента генерации последнего опорного сигнала, таким же образом, как и в отношении сукна 911 на Фиг. 12В и 12С. Таким образом, показания давления, полученные за это время, могут быть все связаны с одним и тем же временным сегментом отслеживания периода оборота сетки 906. Часть 1309 сетки 906, которая соответствует этому временному сегменту отслеживания, может быть вычислена таким же образом, как и в отношении сукна 911 на Фиг. 12В и 12С. Таким образом, показания давления в области зоны контакта 212А, которые связаны с разными временными сегментами отслеживания, также могут быть связаны с соответствующими окружными сегментами отслеживания сетки 906 относительно контрольного положения 1308.
Подобно тому, как получены данные с Фиг. 4А и 4В, Фиг. 14А-14С и Фиг. 15А-15С, синхронизированные с периодом оборота сопряженного вала 11, сукна 913 и сукна 911, показания датчиков из области зоны контакта 212А также могут быть получены синхронизированными с периодом оборота сетки 906. Кроме того, подобно меткам и основанным на отсчете сегментам отслеживания на Фиг. 12D и Фиг. 12Е в отношении сукна 913А, подобный основанный на отсчете способ может быть применен к сетке 906, чтобы получить данные с датчиков, синхронизированные по времени с оборотом сетки 906.
На Фиг. 17 представлена технологическая схема примера способа синхронизации данных по времени в соответствии с принципами настоящего изобретения. В частности, способ может быть применен к сенсорному валу и, возможно, расположенным ранее сукнам и сеткам. Способ начинается с этапа 1702, на котором соответствующий сигнал генерируется каждым из датчиков, расположенных в разнесенных по оси местах сенсорного вала. Более конкретно, каждый соответствующий сигнал датчика генерируется, когда каждый датчик входит в некоторую область зоны контакта между сенсорным валом и сопряженным валом во время каждого оборота сенсорного вала. Это происходит потому, что сенсорный вал и сопряженный вал расположены друг относительно друга так, чтобы создать между ними зону контакта, и полотно материала проходит через зону контакта в направлении с начала к концу технологической линии. Кроме того, бесконечная полоса проходит вокруг по кругу и контактирует по меньшей мере с некоторой областью полотна материала в зоне контакта или перед зоной контакта. Способ продолжается этапом 1704 на котором периодически генерируется опорный сигнал времени в связи с каждым оборотом бесконечной полосы по кругу. Далее, в соответствии с способом на этапе 1706 принимается соответствующий сигнал, генерируемый каждым датчиком. На этапе 1708 после приема соответствующего сигнала датчика способ включает три разных действия: а) определение одного конкретного датчика из множества, который генерировал соответствующий сигнал, b) идентификация одного из множества сегментов отслеживания, связанных с бесконечной полосой, на основании времени, которое прошло между моментом генерации соответствующего сигнала датчика и самым последним опорным сигналом времени, и с) сохранение соответствующего сигнала датчика, чтобы связать его с идентифицированным сегментом отслеживания. Следует особо сказать, что каждый из множества сегментов отслеживания связан, соответственно, с величиной прошедшего времени, отличной от других. В соответствии с способом с Фиг. 17, бесконечная полоса может включать прессовое сукно или металлическую сетку. Кроме того, бесконечная полоса может проходить через зону контакта или просто контактировать с участком полотна материала перед зоной контакта.
Хотя были описаны и показаны конкретные варианты осуществления настоящего изобретения, специалистам в данной области техники будет очевидно, что могут быть внесены разные другие изменения и модификации без нарушения сущности и объема изобретения. Поэтому предполагается, что прилагаемая формула изобретения включает все такие изменения и модификации, которые входят в объем настоящего изобретения.
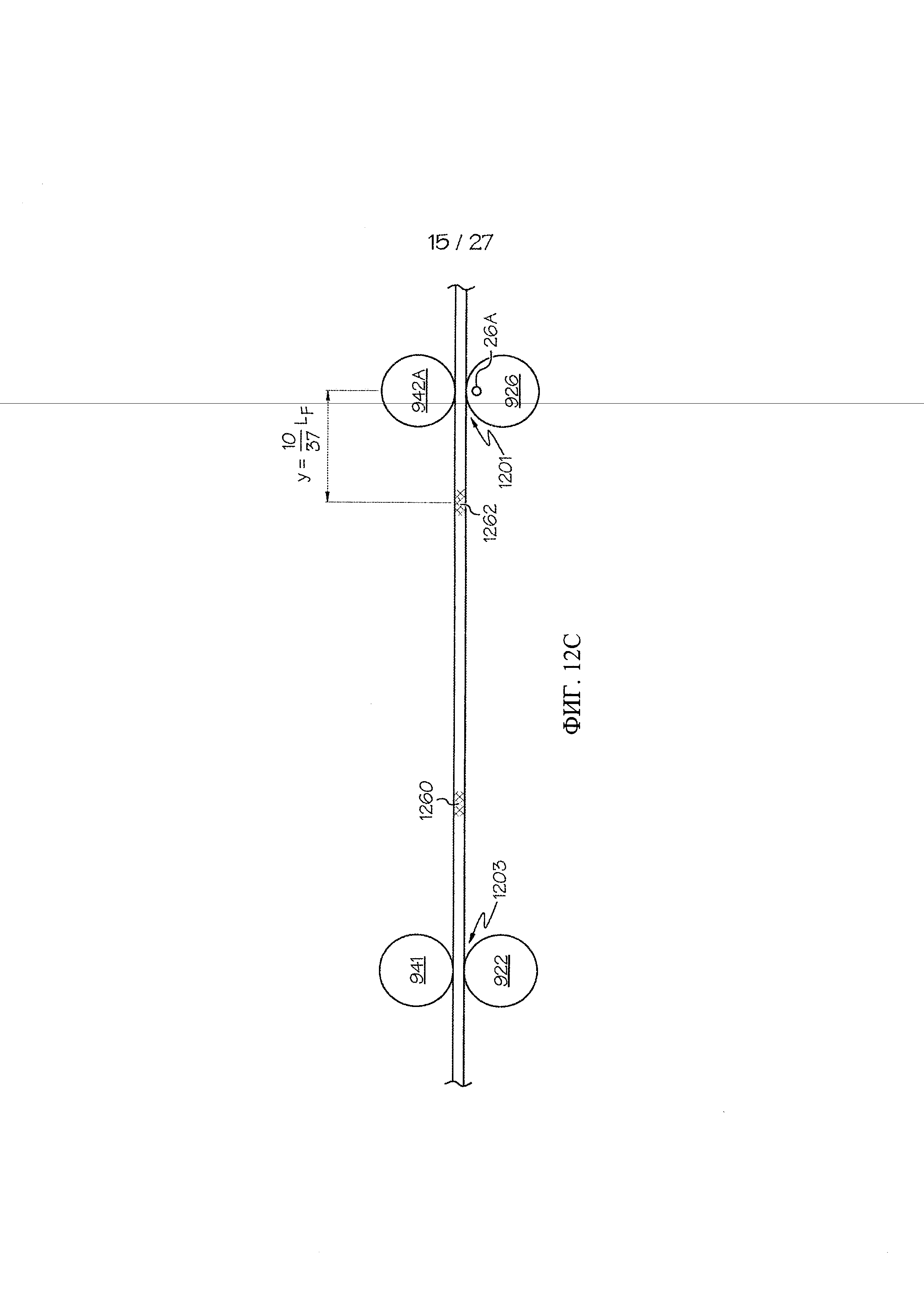
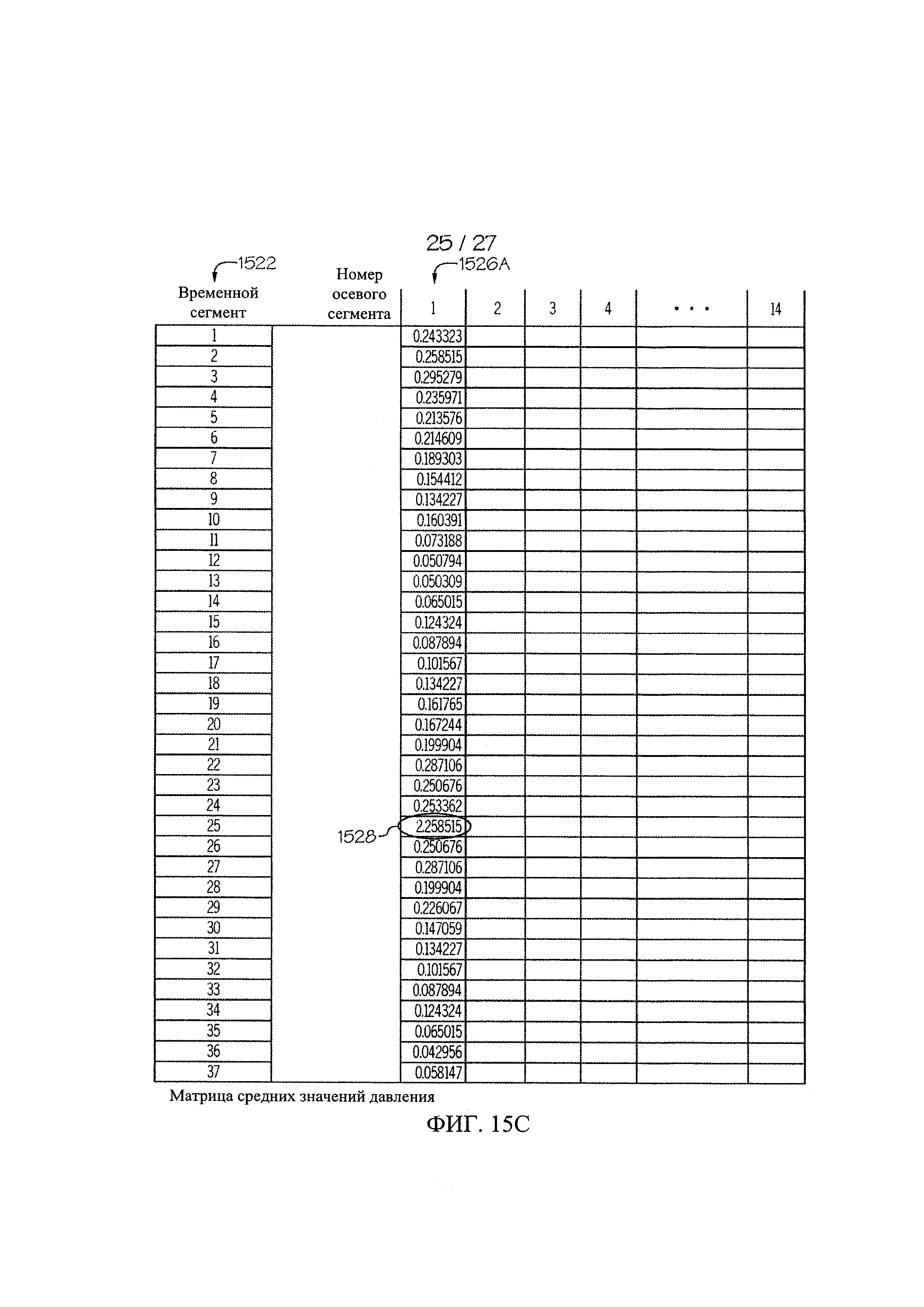
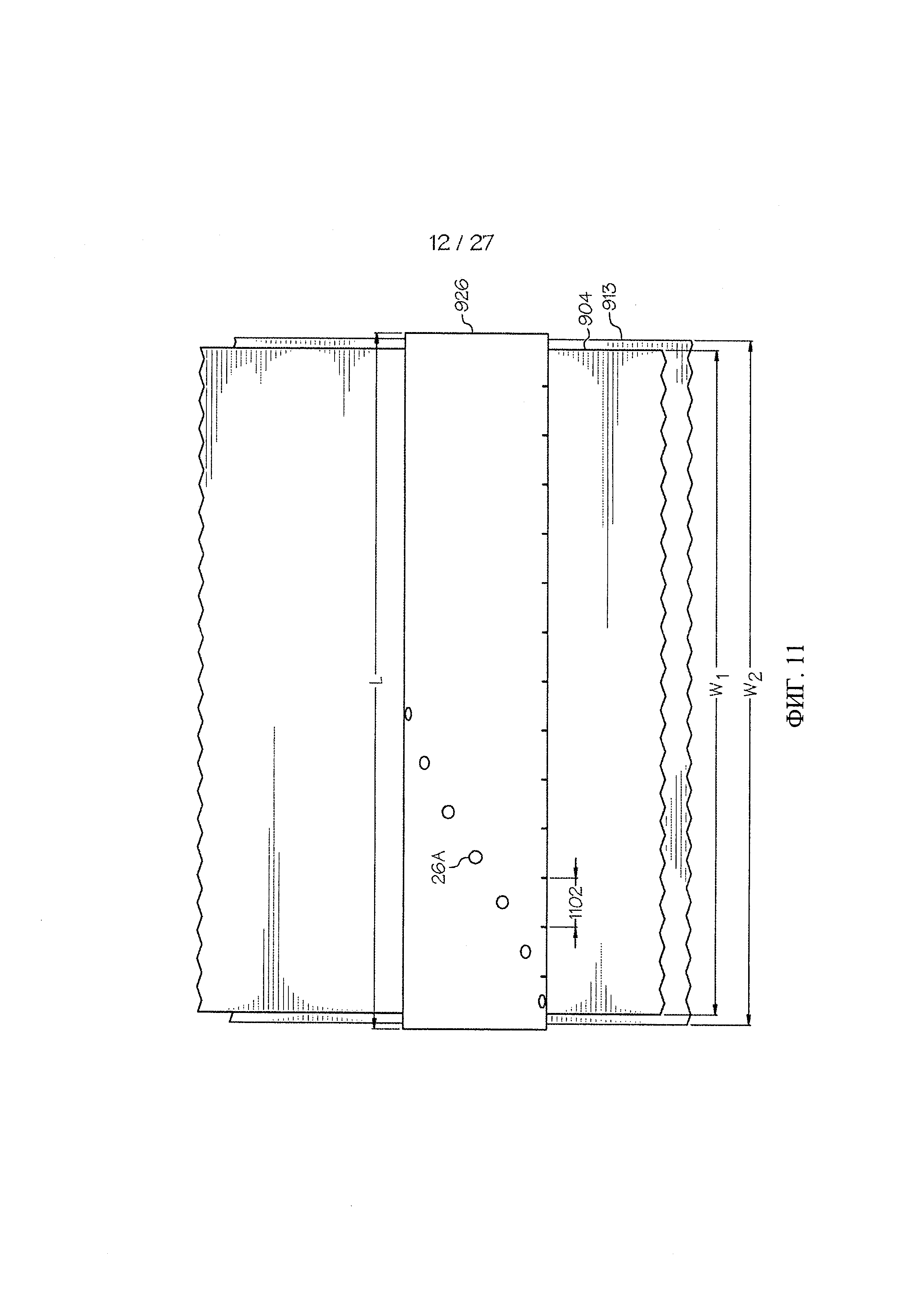
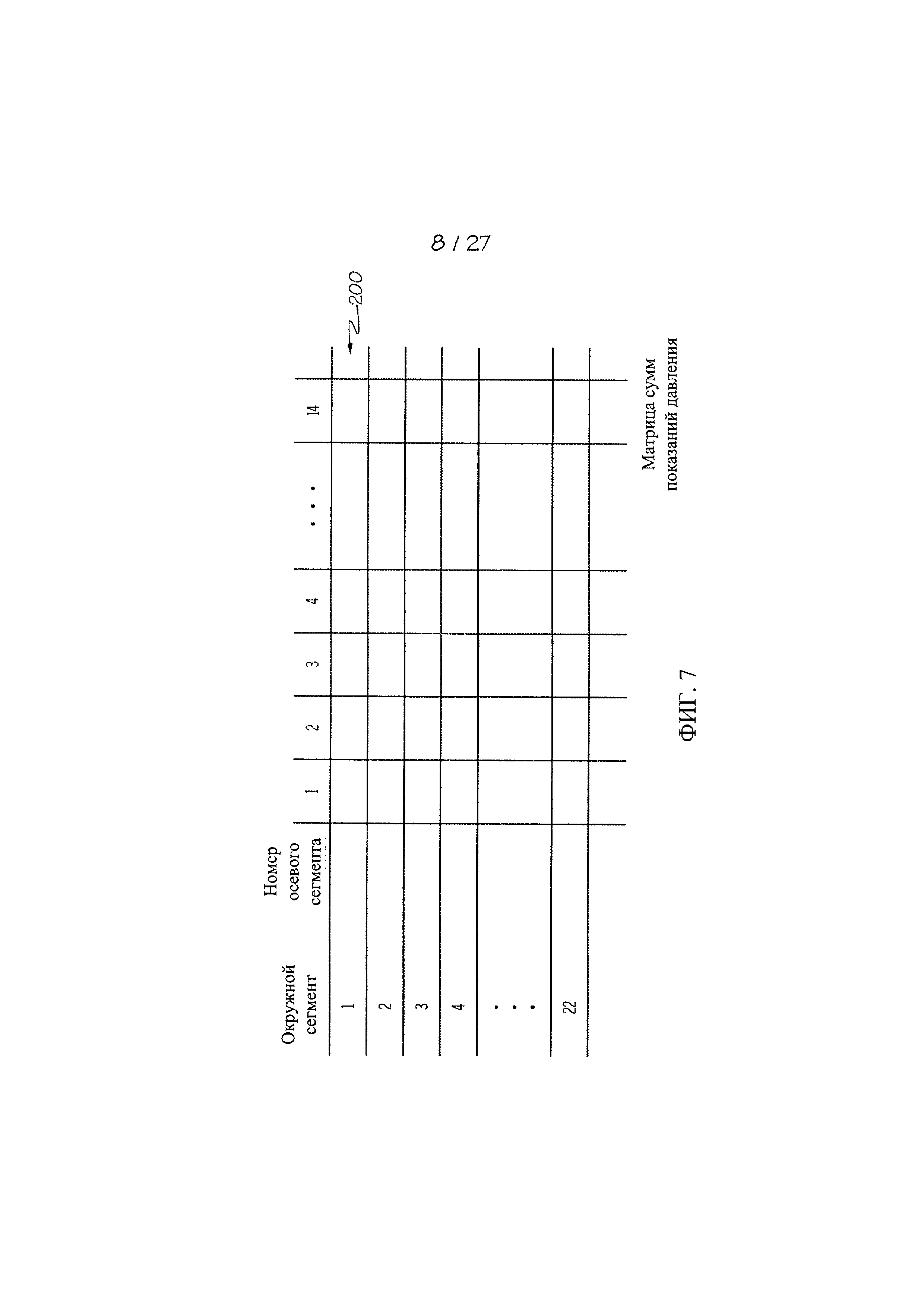
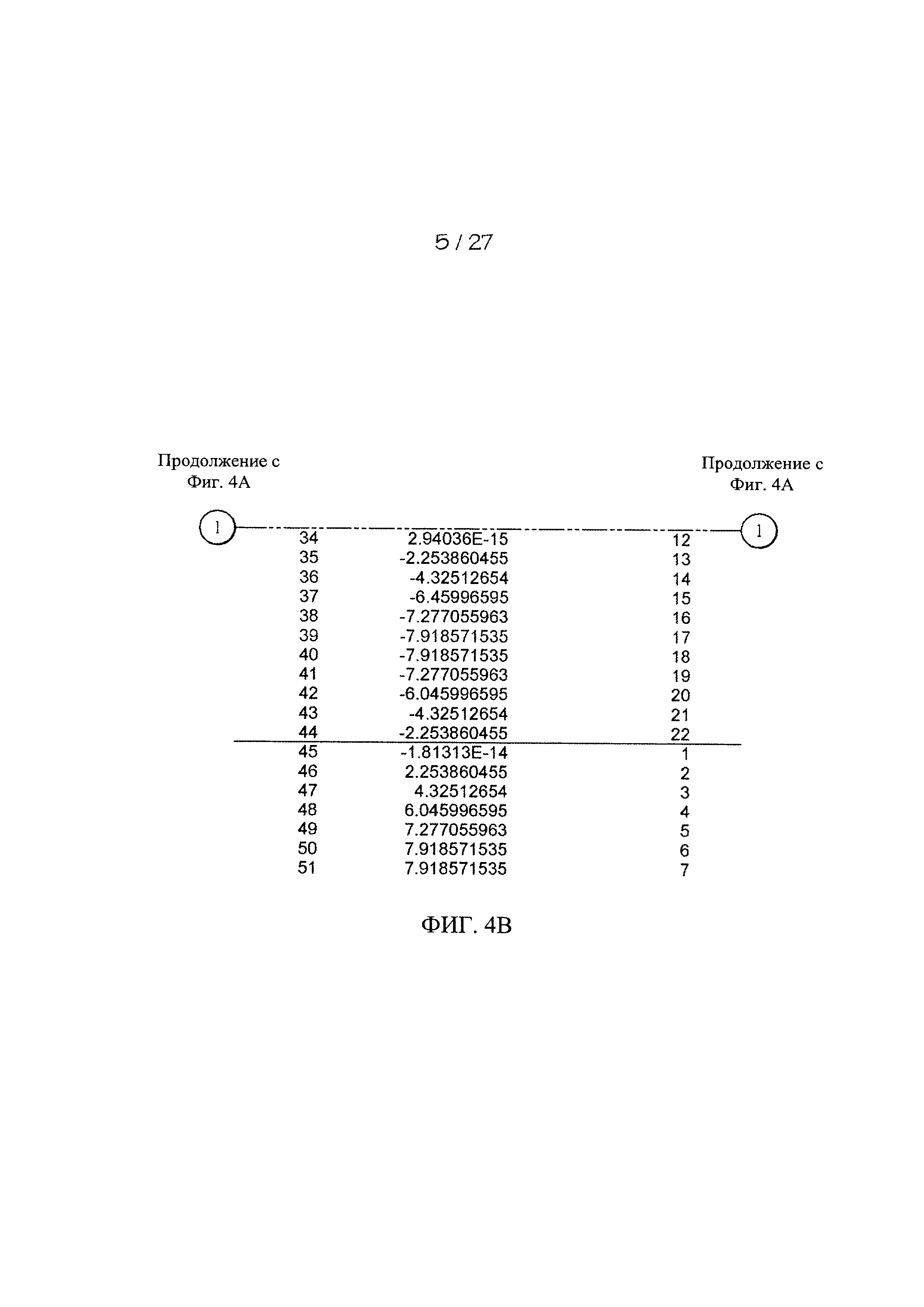
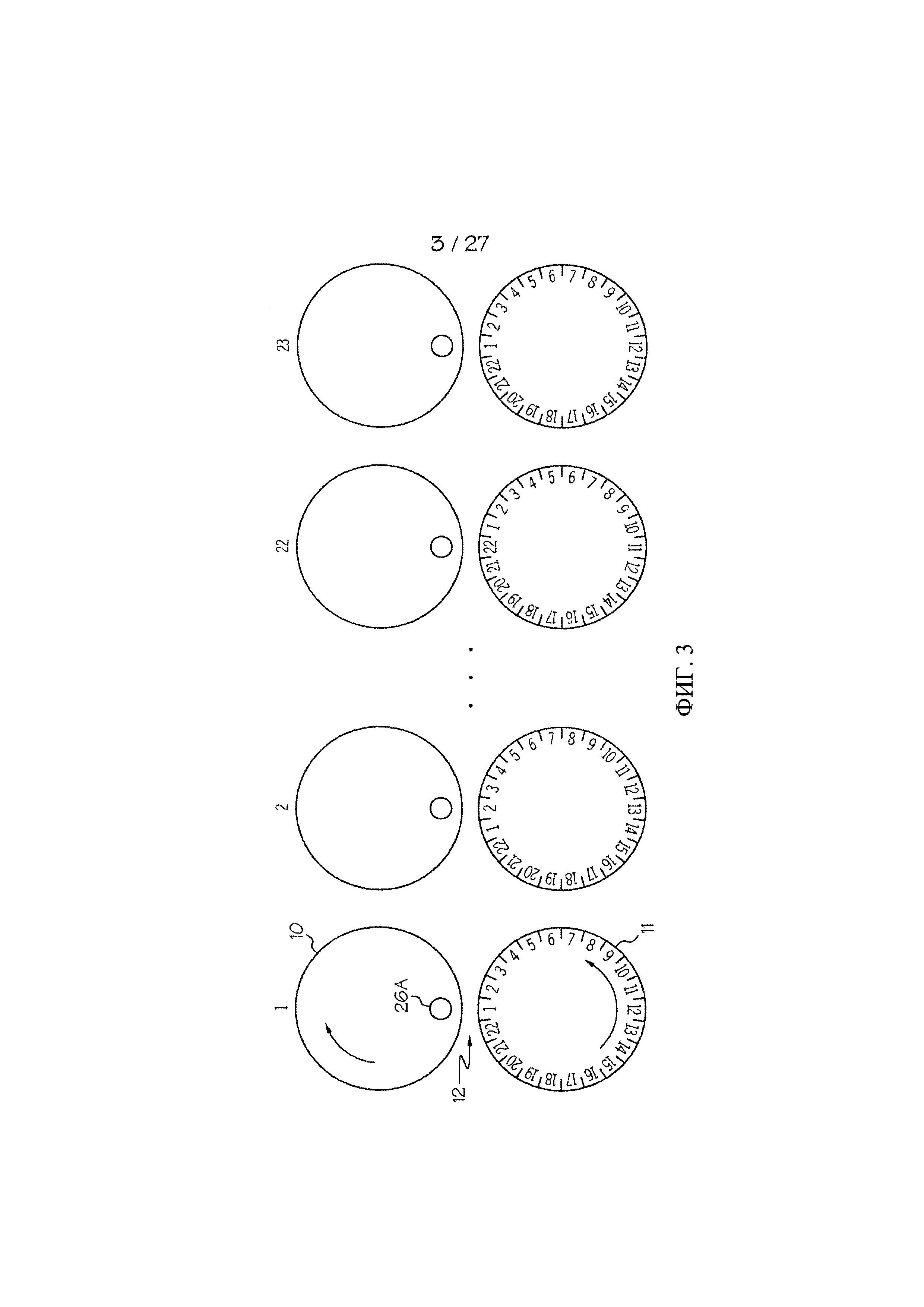
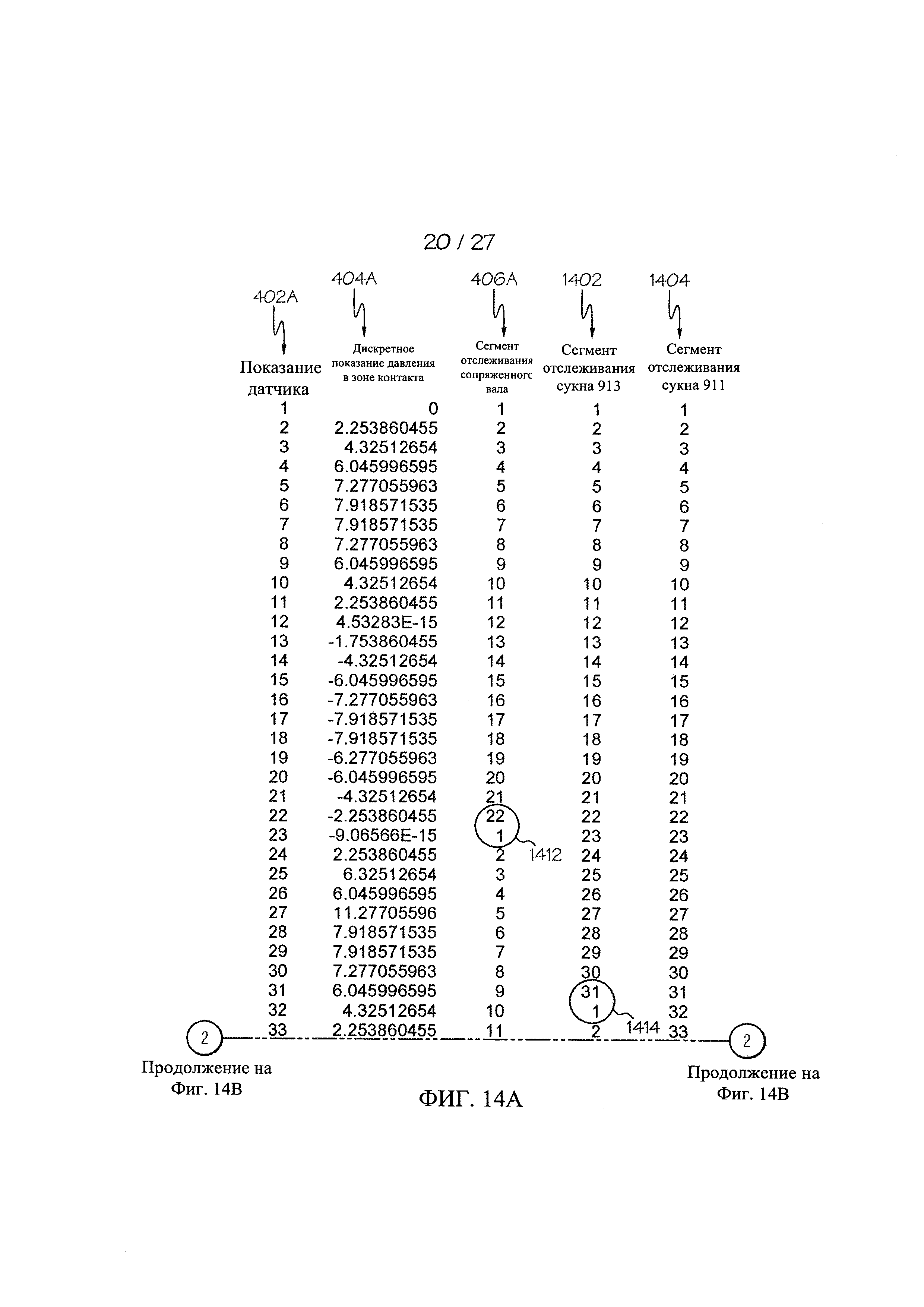

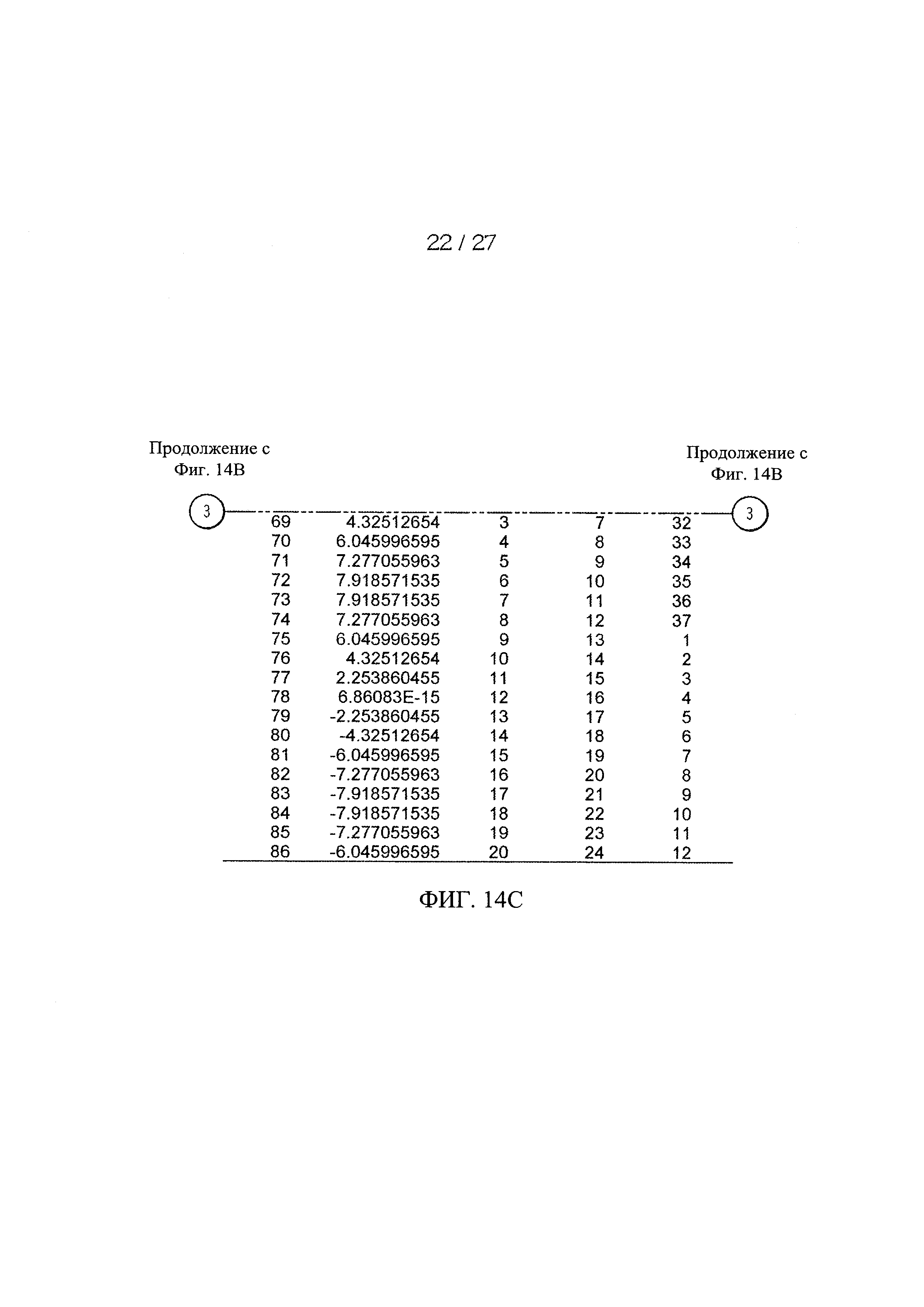
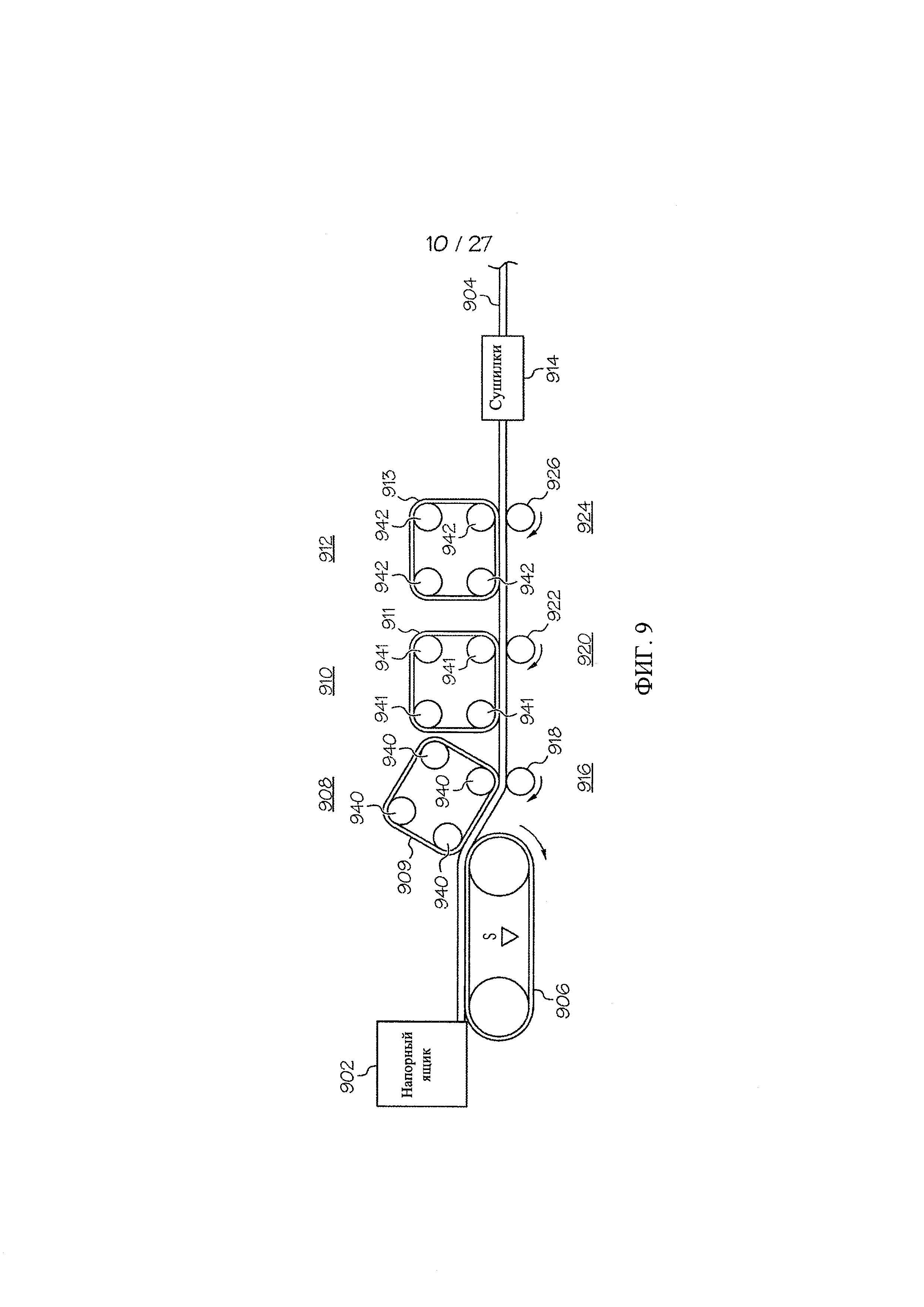
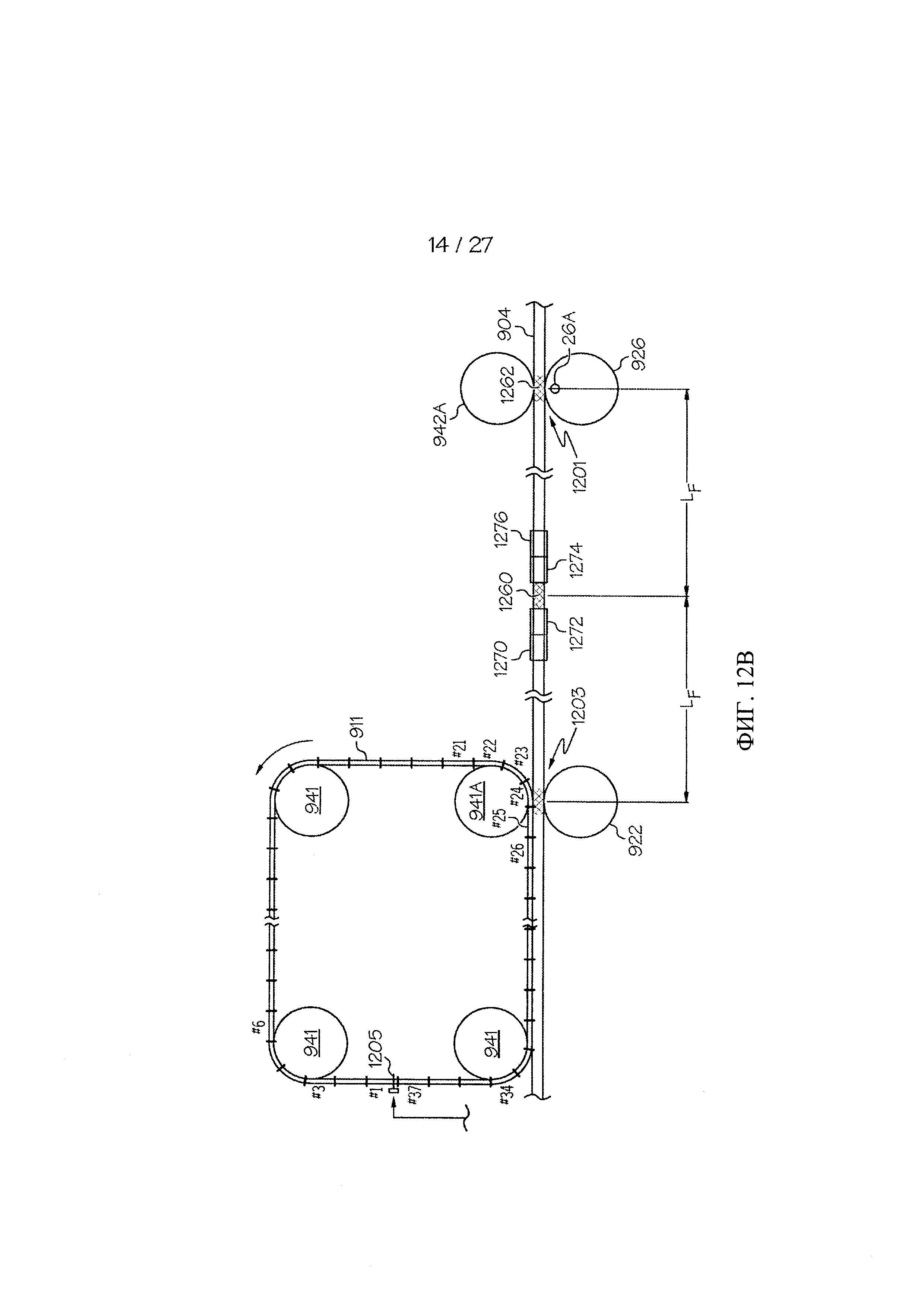
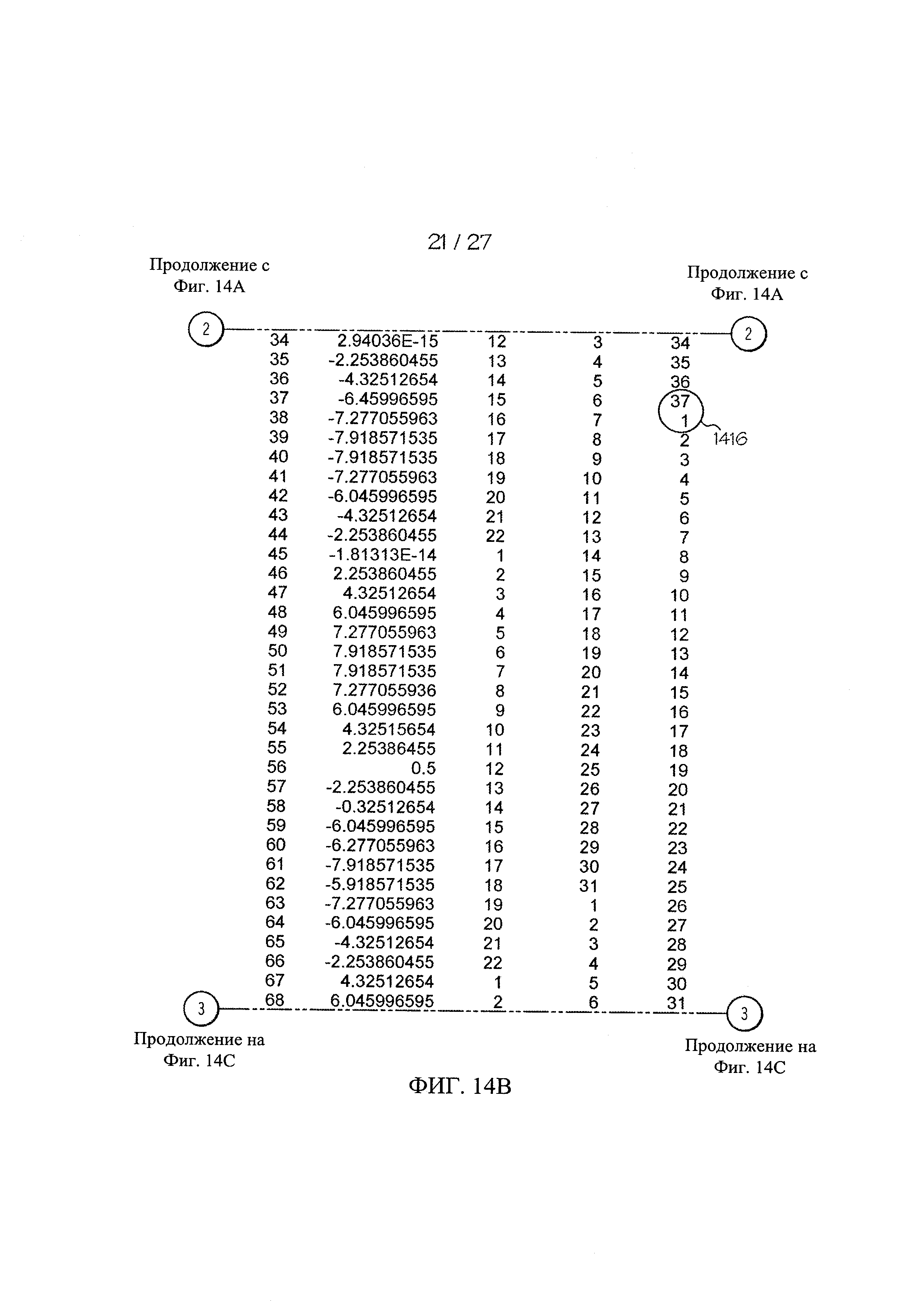
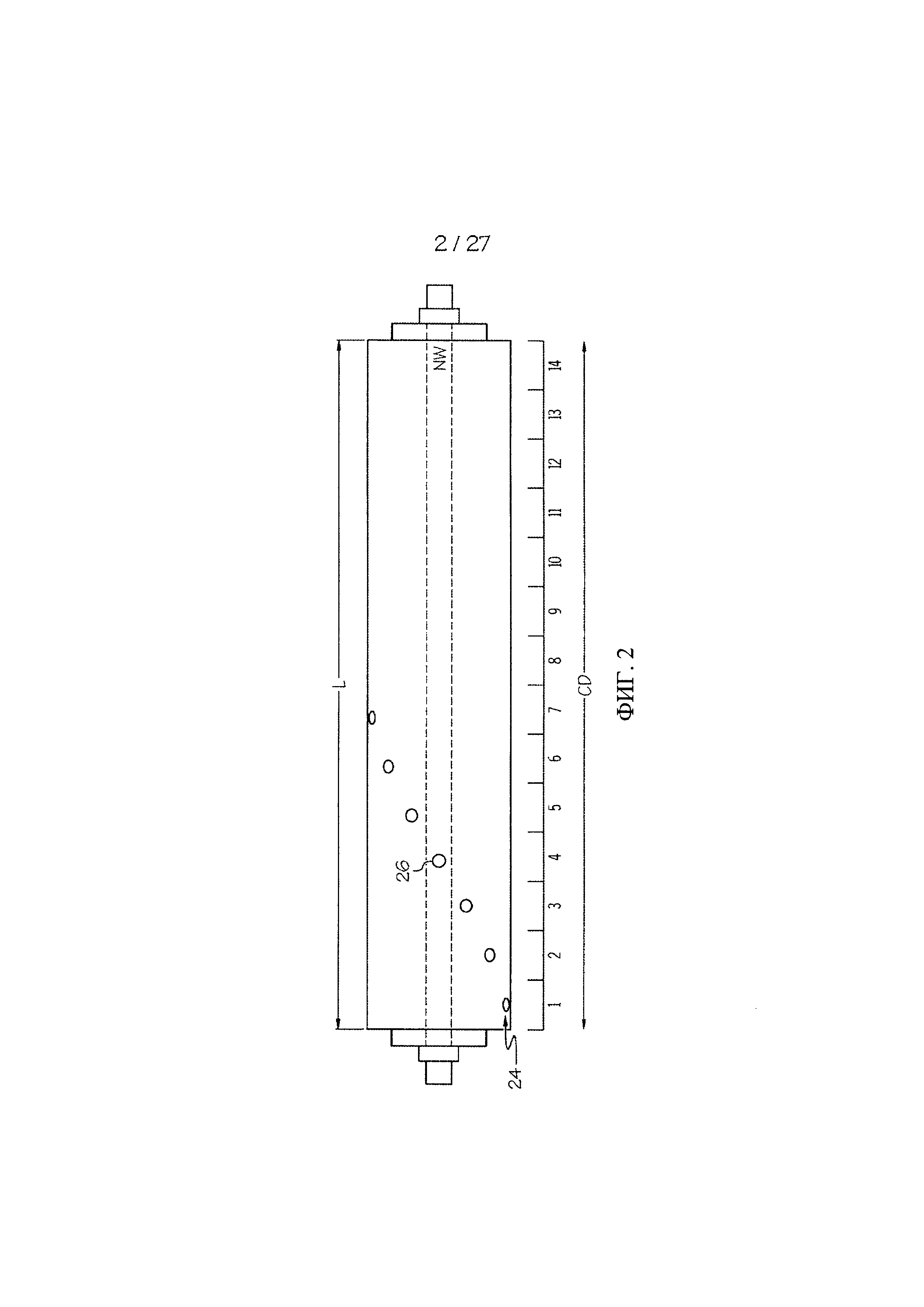
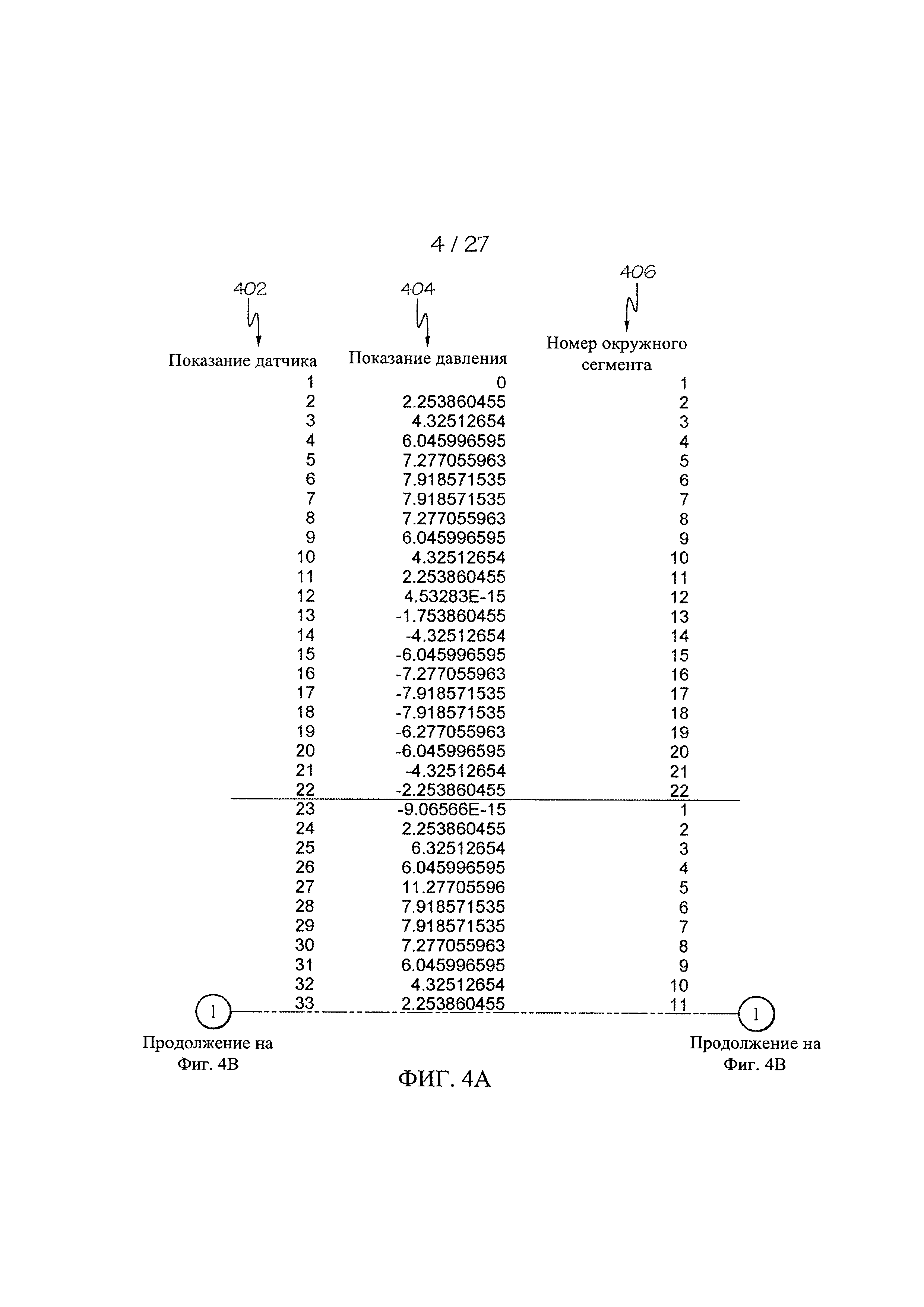
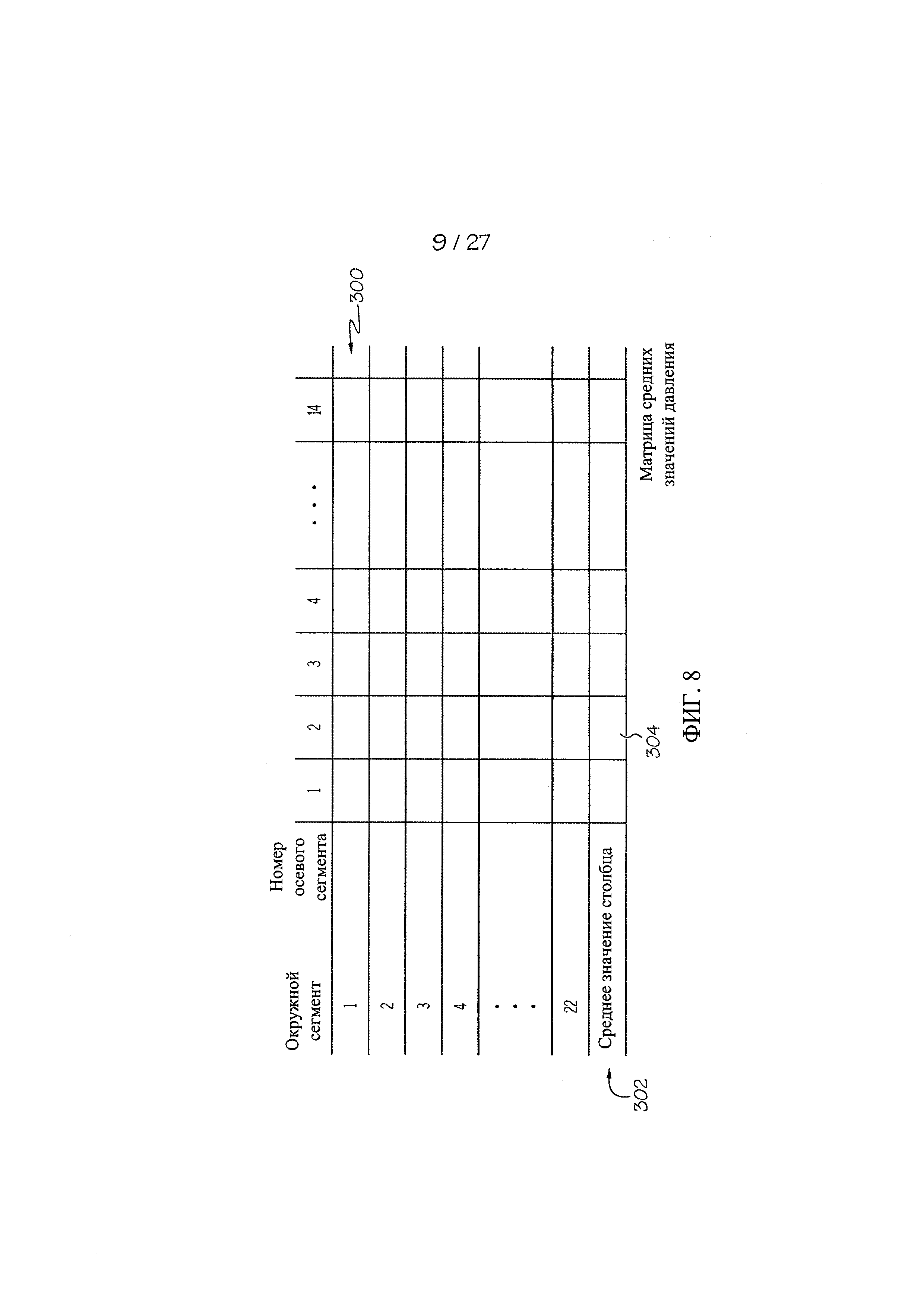
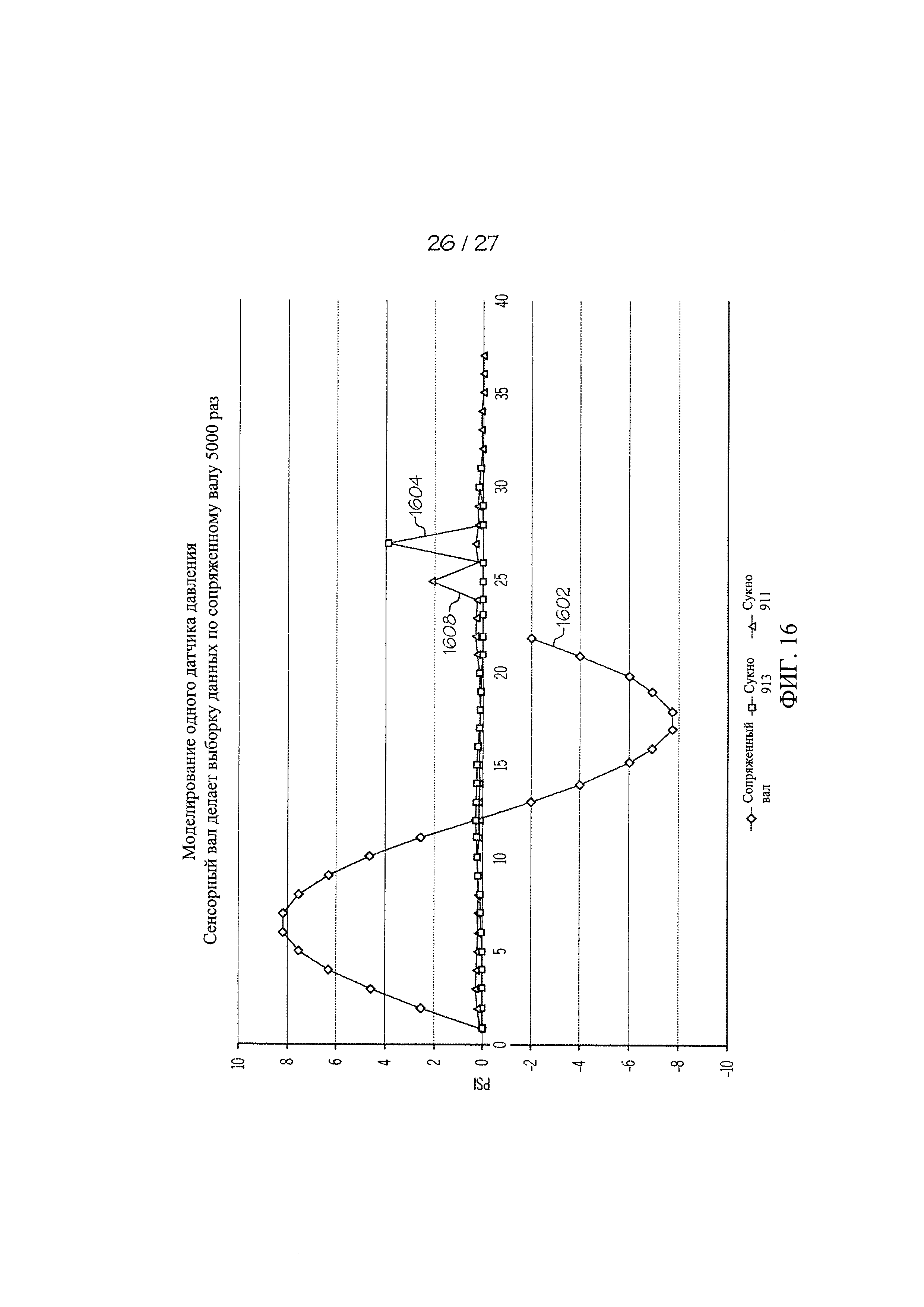
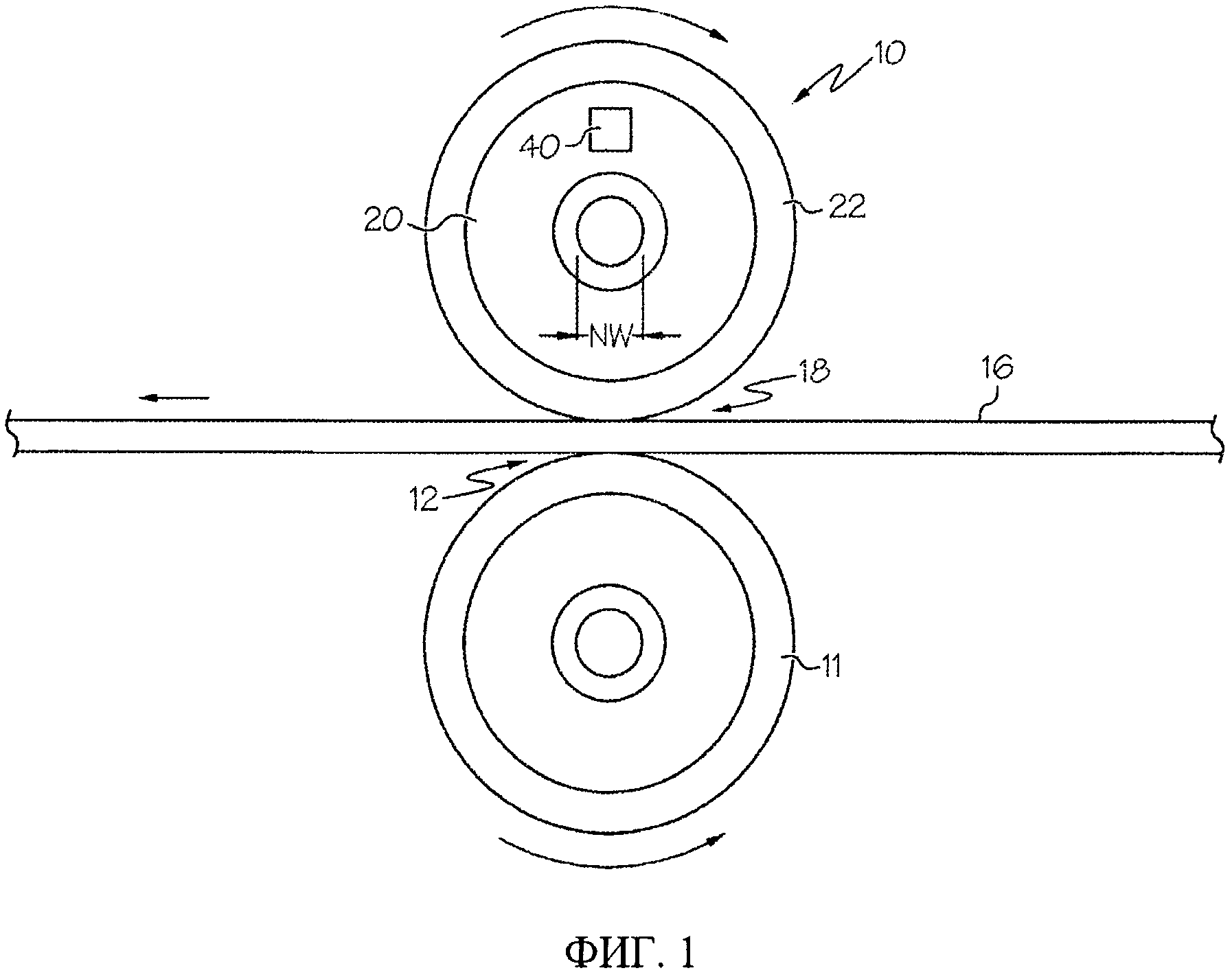
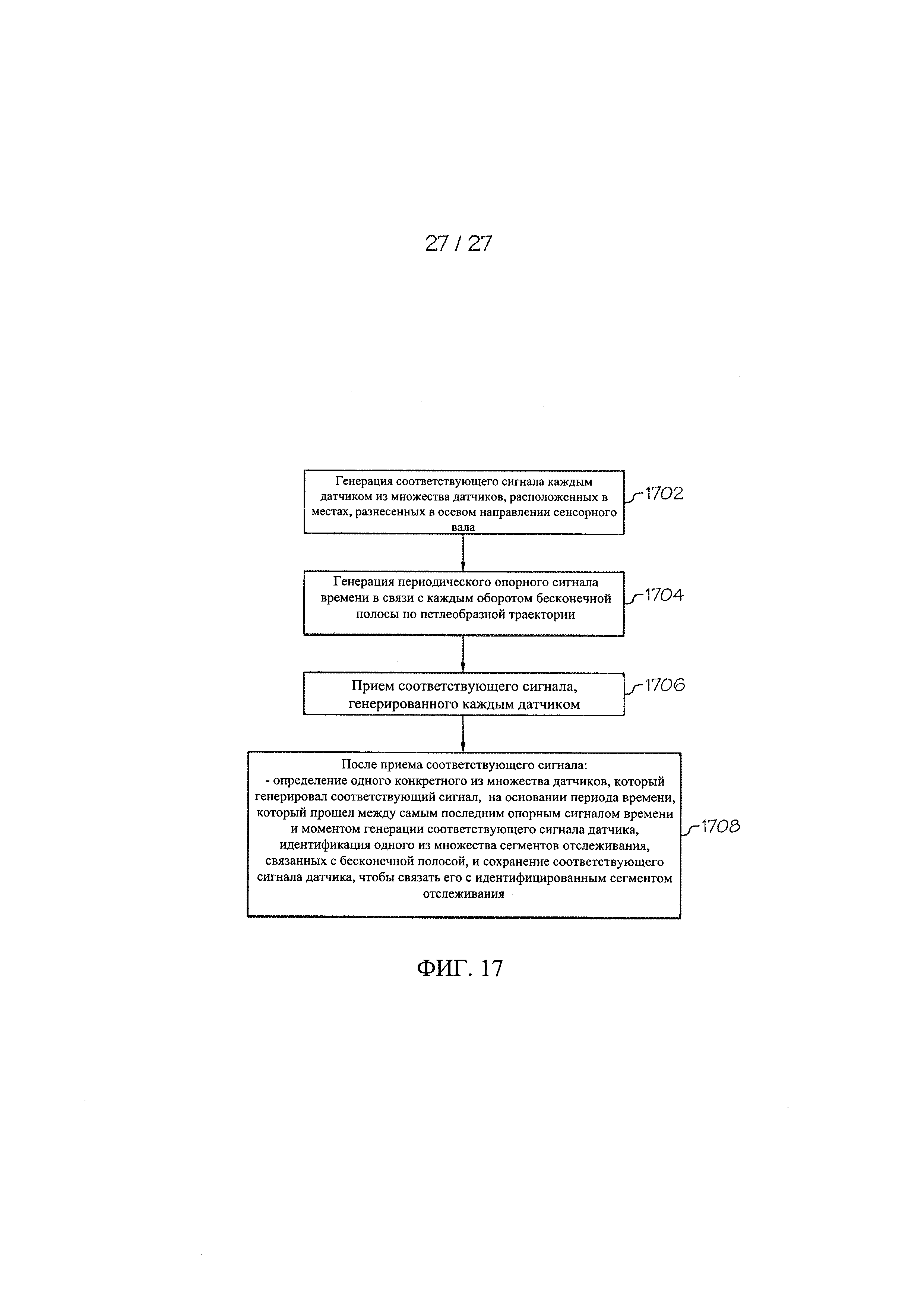
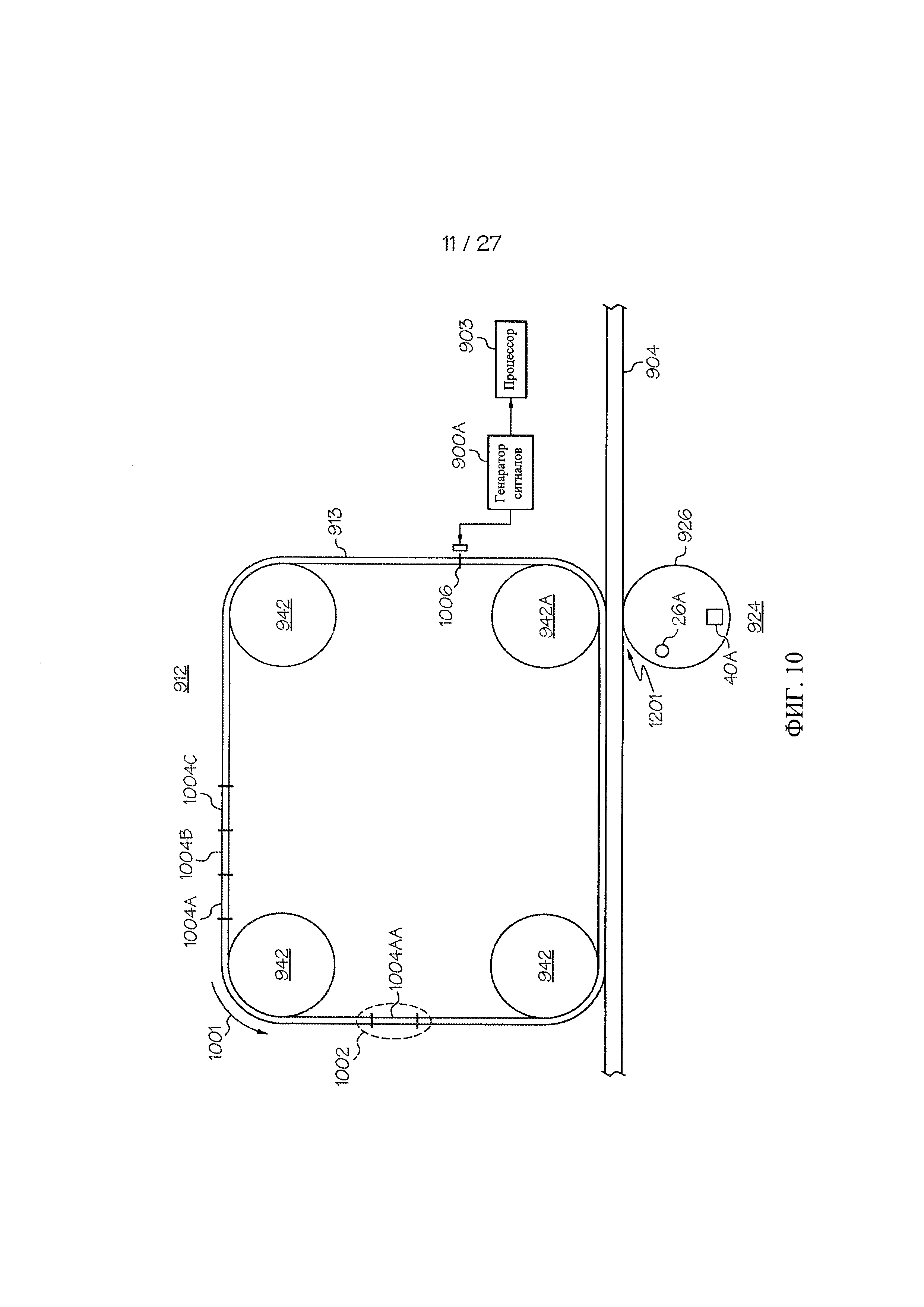
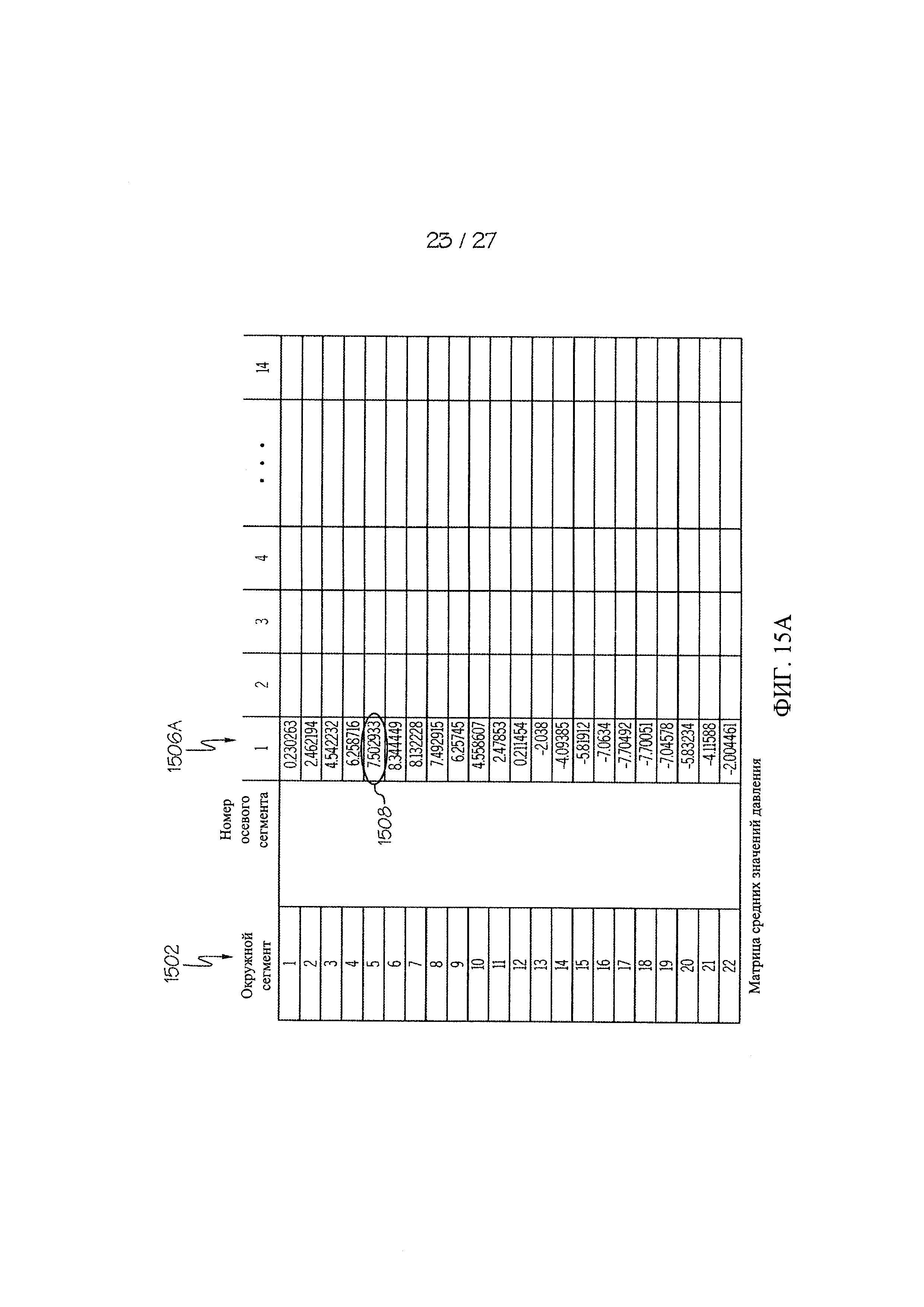
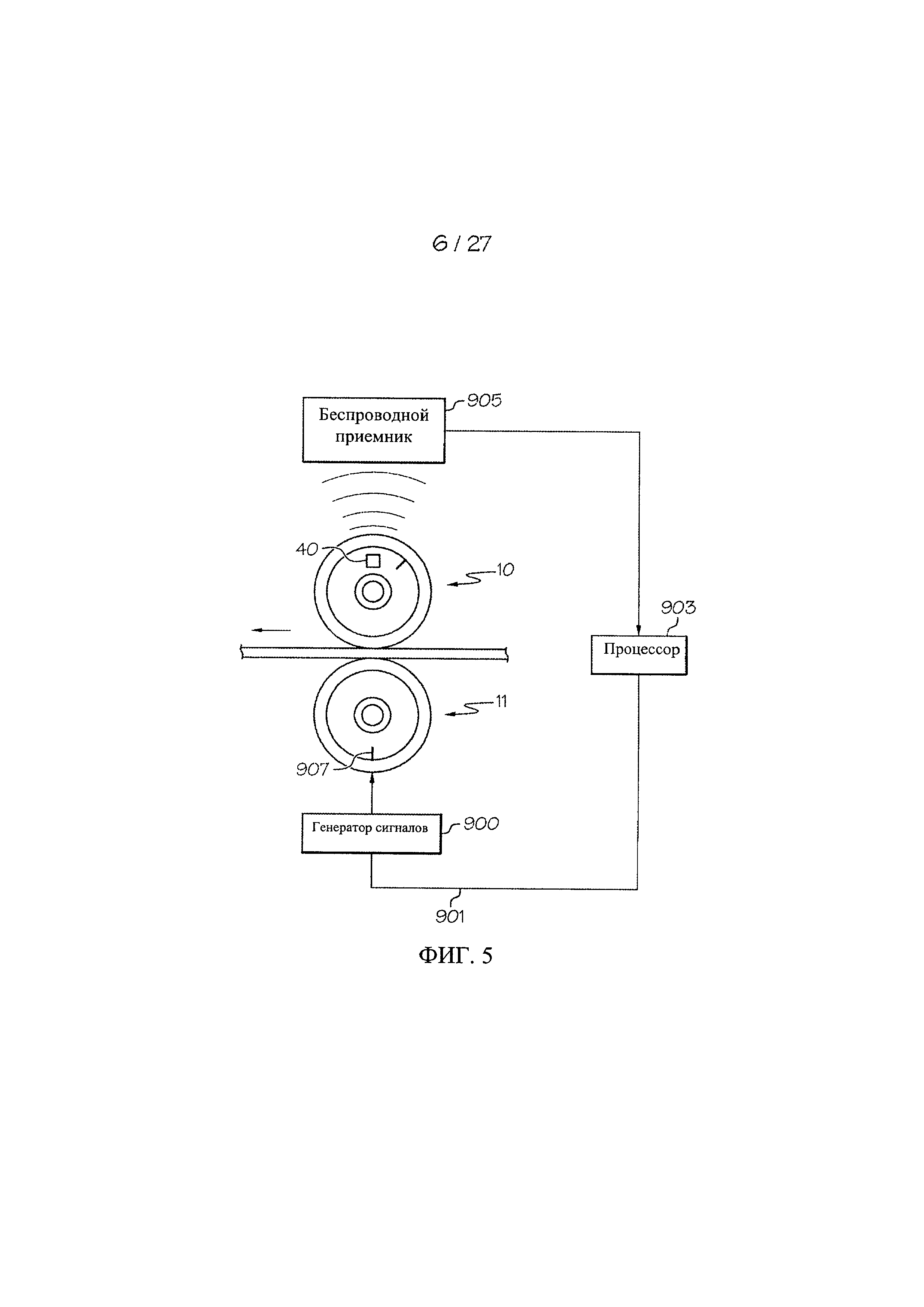
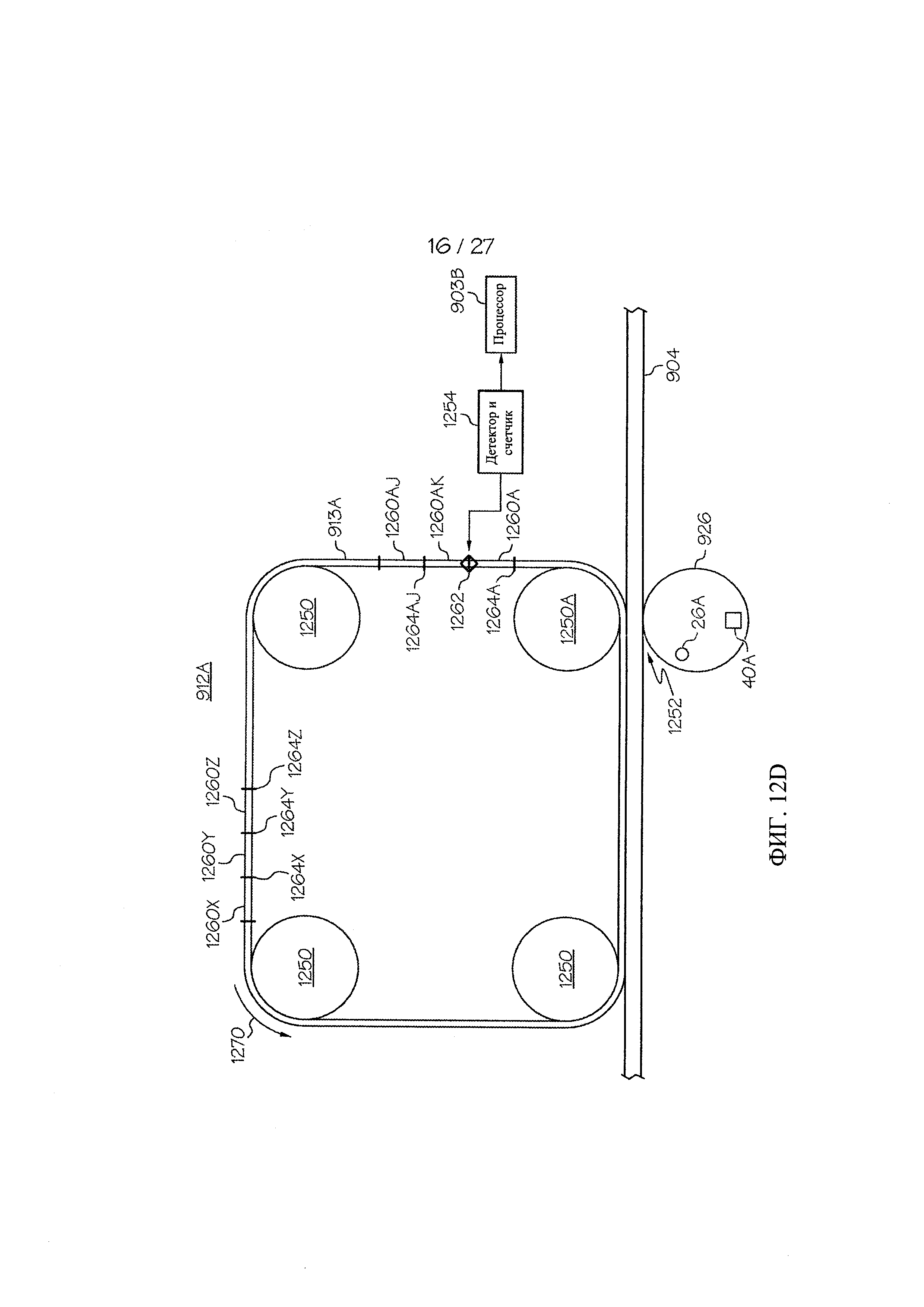
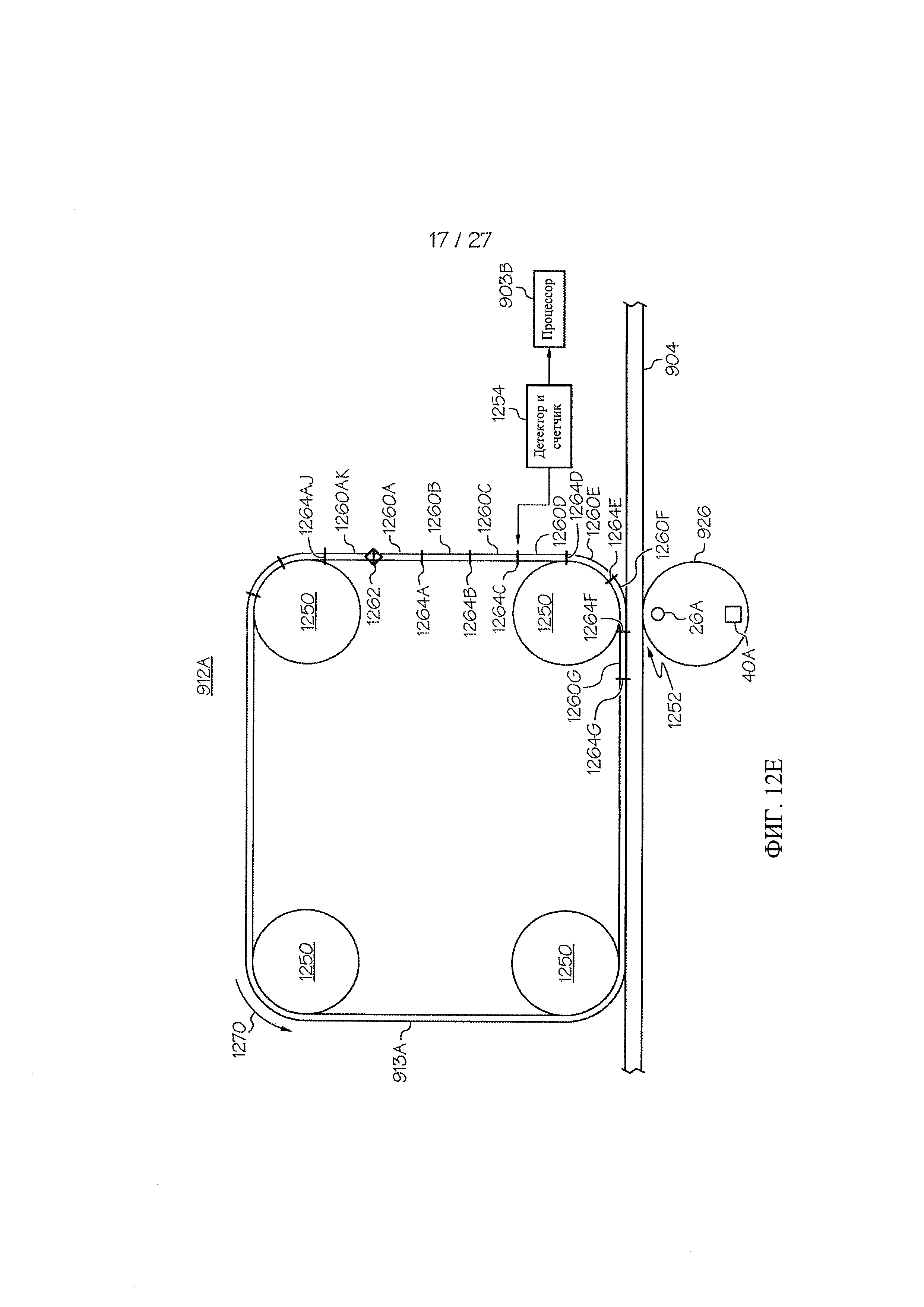
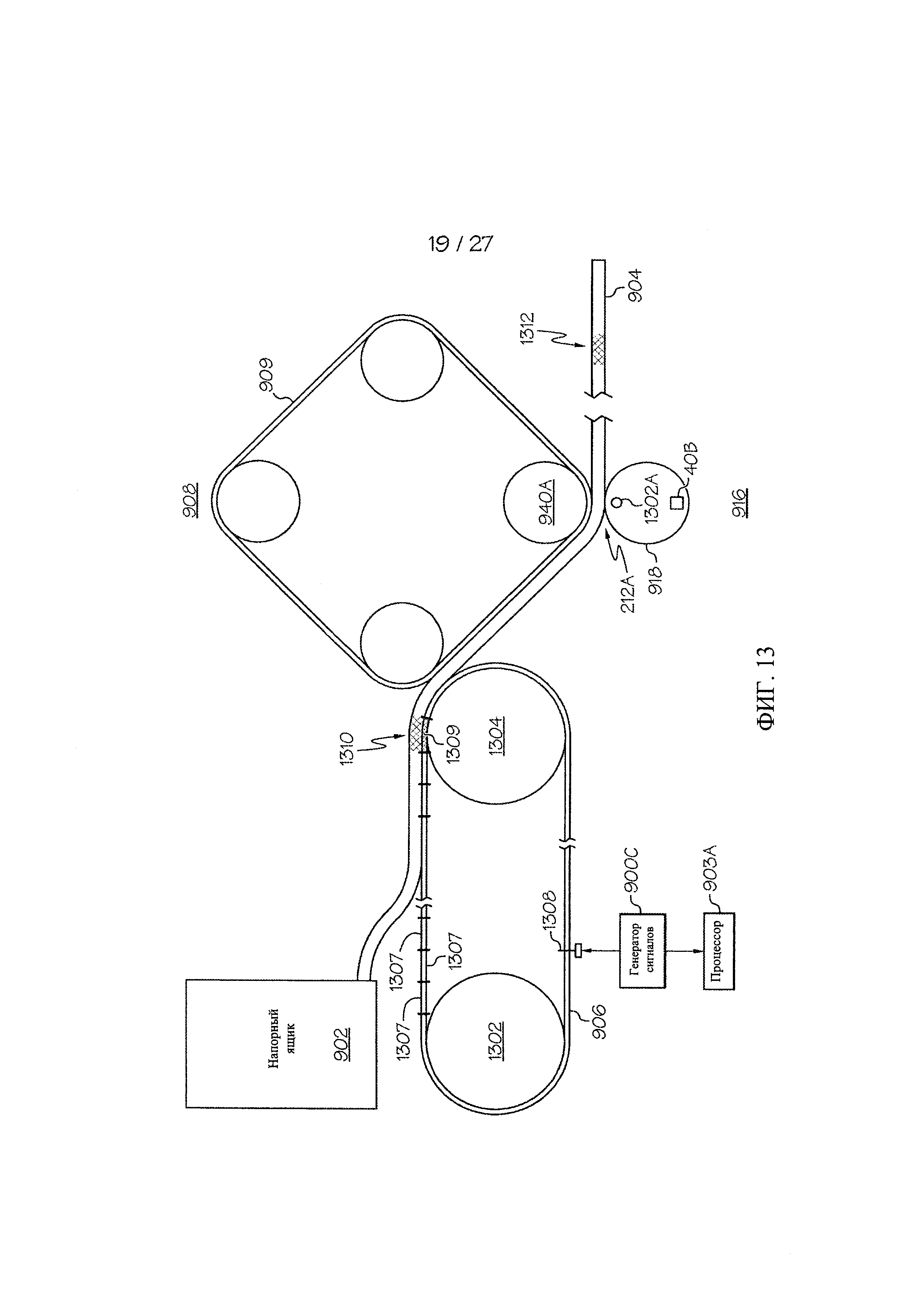
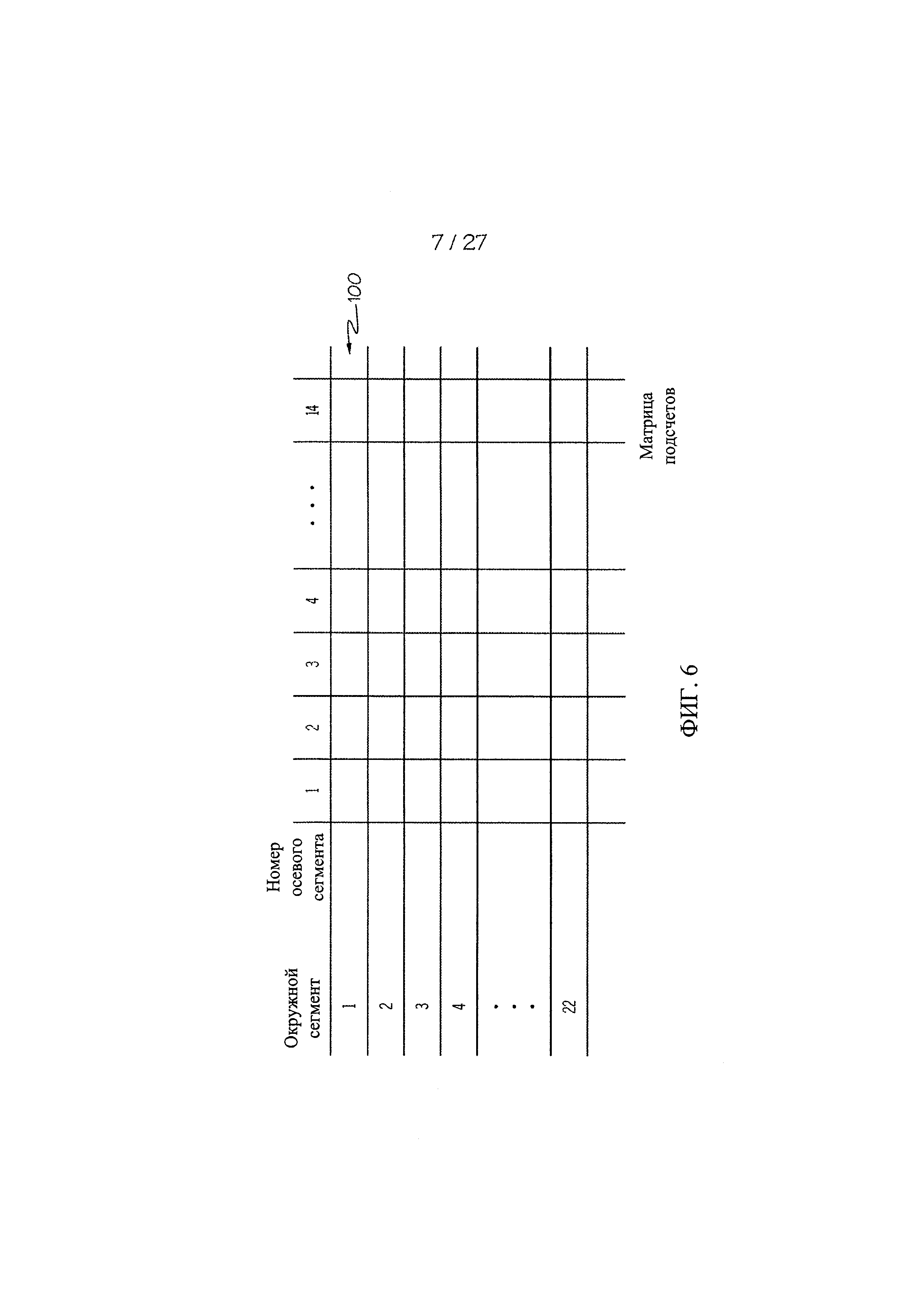
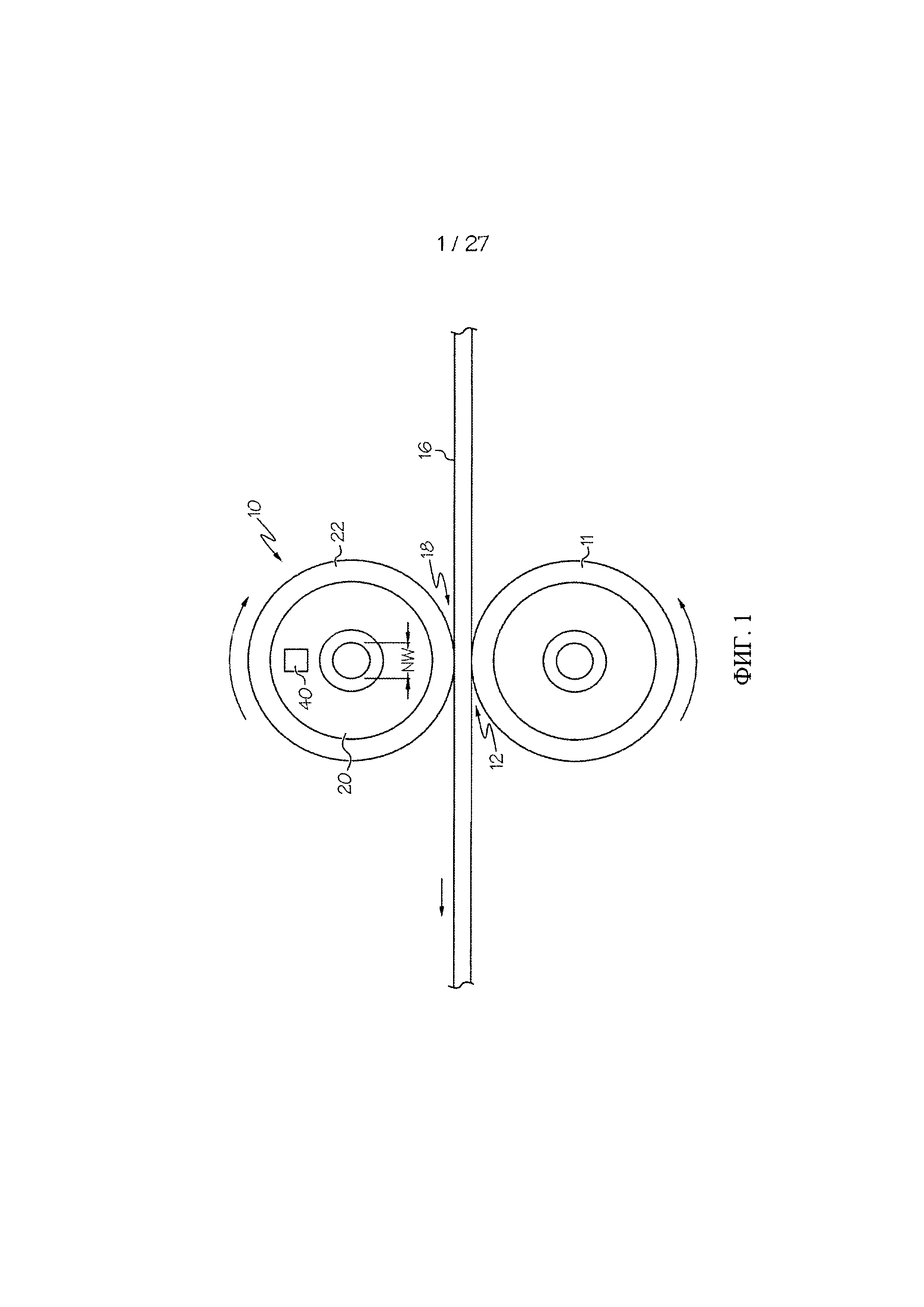
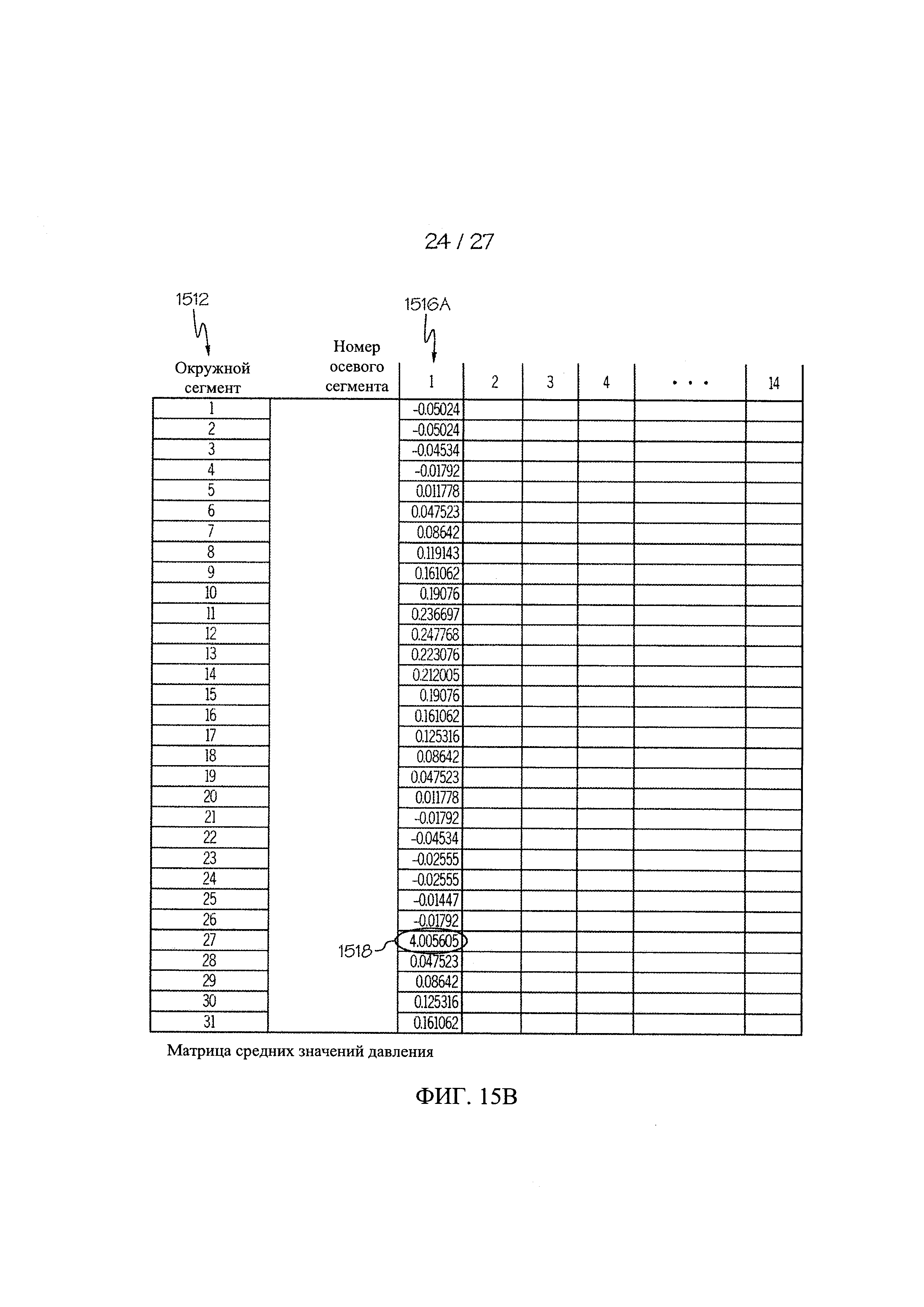
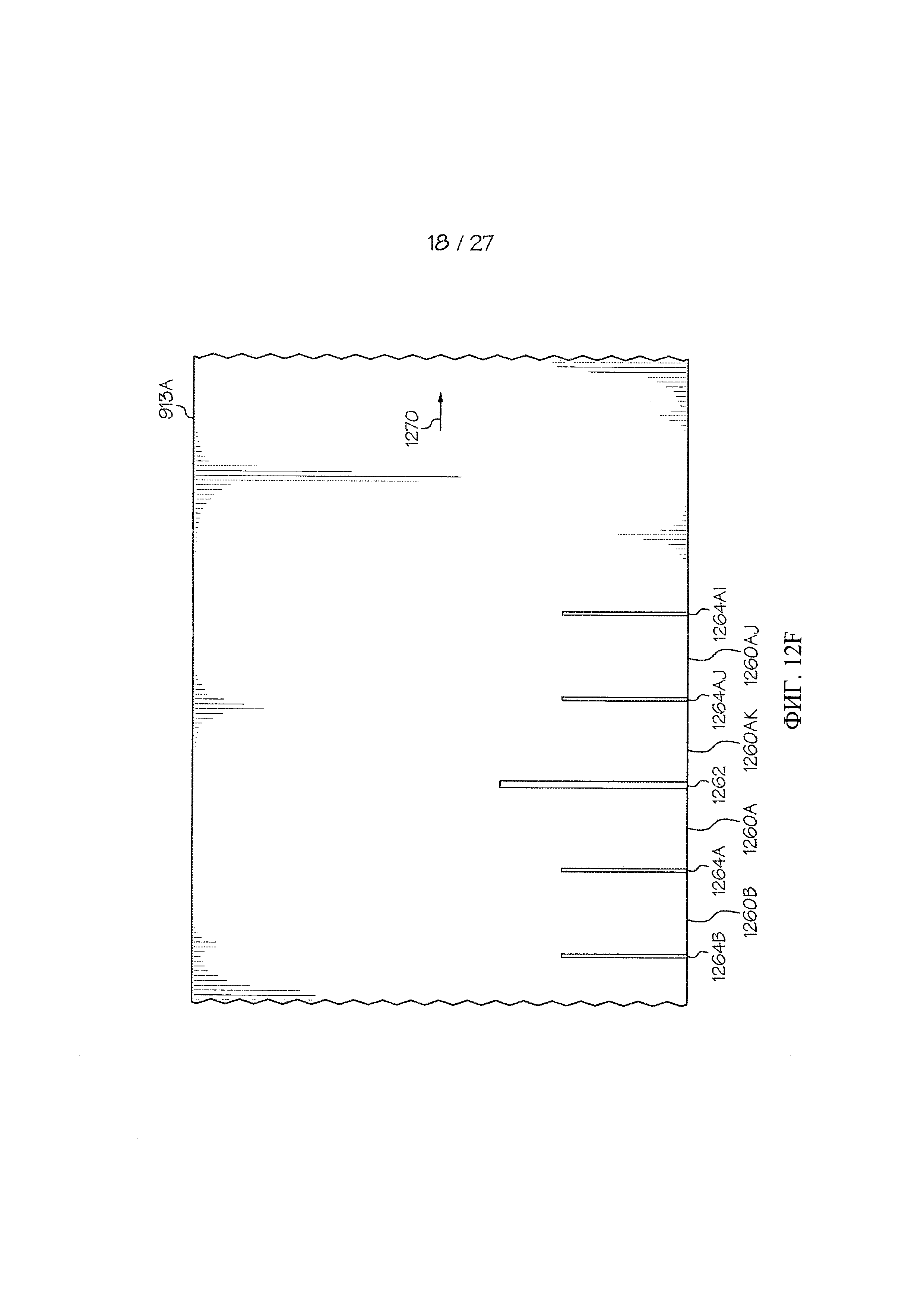
Бумажная или картонная основа, содержащая целлюлозные волокна и расширяемые микросферы, и упаковочная тара, содержащая эту основу
Система и способ для контроля качающегося компонента
Контроль входных сеток и сукон бумагоделательной машины
Система и способ для контроля полосы
Система и способ для контроля наносящего стержня
Контроль стержней для нанесения покрытий и зон контакта стержней для нанесения покрытий
Система и способ для определения места загрязнения на теплопередающей поверхности котла-утилизатора
Варочный котел непрерывного действия и система питания
Бумажные основы, применяющиеся для изготовления ленты для перекрытия стыков между облицовочными листами
Распушенная целлюлоза и сердцевина с высоким содержанием сап
Способ и устройство для измерения и устранения вращательной изменчивости профиля давления в зоне прессования вала с покрытием отжимного пресса
Способ и система, относящиеся к сенсорному валу и сопряженному валу, для сбора данных по валам
Способ и система, связанные с сенсорным валом, включающим множество датчиков, и сопряженным валом для сбора данных по валам
Способ и система, связанные с сенсорным валом, включающим первый массив датчиков, и сопряженным валом, включающим второй массив датчиков, для сбора данных по валам
Система и способ для контроля наносящего стержня
Контроль стержней для нанесения покрытий и зон контакта стержней для нанесения покрытий
Способ и устройство для измерения и устранения вращательной изменчивости профиля давления в зоне прессования вала с покрытием отжимного пресса
Способ и система, относящиеся к сенсорному валу и сопряженному валу, для сбора данных по валам

